Исследование параметров виброполосы с помощью математической модели

Автор: Поезжаева Елена Вячеславовна, Юшков Владимир Сергеевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Конверсионные, НАНО- и инновационные технологии
Статья в выпуске: 1-2 т.14, 2012 года.
Бесплатный доступ
В статье представлена математическая модель двухчастотного колебания автомобиля. Исследованы параметры конструкции нанесения шумовой полосы на автомобильную дорогу, а также влияние данной полосы на водителя. Произведены расчеты частот галопирования.
Частота галопирования, виброполоса, транспортное средство, автомобильная дорога, математическая модель
Короткий адрес: https://sciup.org/148200664
IDR: 148200664 | УДК: 625.7:621.317
Research the parameters of vibrostrip by means of mathematical model
In article the mathematical model of bifrequency fluctuation of the car is presented. Parameters of construction for drawing a noise strip on the highway, and also influence of this strip on the driver are investigated. Calculations of galloping frequencies are made.
Текст научной статьи Исследование параметров виброполосы с помощью математической модели
Автомобилизация наряду с огромным положительным влиянием на экономику государств, создание удобства и комфорта для людей может вызвать ряд негативных явлений, человеческие жертвы, огромный материальный ущерб в результате дорожно-транспорт-ных происшествий (ДТП), шум, загазованность воздушных бассейнов городов, загромождение улиц стоящими автомобилями и, наконец, транспортные заторы и резкое снижение скорости движения. В связи с ростом автомобильного парка и интенсивности движения транспортных средств для повышения безопасности предусмотрено совершенствование мероприятий по внедрению современных способов нанесения горизонтальной дорожной разметки [1].
Проблема безопасности дорожного движения представляет собой сложный комплекс факторов, связанных с состоянием транспортных средств, дорожных конструкций, условий движения, психо-физиологического поведения водителей, плотности транспортных потоков и др. Одним из путей решения этой проблемы является создание конструктивных элементов на дорожной одежде, способствующих генерации колебаний транспортных средств в режимах некомфортного восприятия водителем условий движения. Для выбора оптимальных параметров такой конструкции необходимы математические модели, включающие в себя характеристики автотранспортных средств (АТС), скорость движения, общую длину, глубину, ширину и шаг неровности, материалы элементов конструкции шумовой полосы [2].
В организации дорожного движения нанесение горизонтальной разметки представляет важную роль. В настоящее время нанесение разметки дорог и улиц способствует снижению
Поезжаева Елена Вячеславовна, кандидат технических наук, профессор
аварийности, при этом движение транспортных средств становится более организованным и упорядоченным, улучшается информированность водителей и пешеходов. Дорожная разметка наносится в соответствии с требованиями дорожных знаков, может применяться как самостоятельно, так и с другими средствами организации движения [3]. К разметке относятся линии, надписи и иные обозначения на проезжей части, бордюрах, элементах дорожных сооружений и обстановки дорог, устанавливающие порядок дорожного движения, показывающие габариты дорожных сооружений или указывающие направление дороги.
Цель работы: построение и исследование математической модели плоских колебаний подрессорного автомобиля в режимах подпрыгивания и галопирования.
Движение АТС осуществляется в пределах так называемого «коридора рыскания». Чем выше скорость движения, тем шире «коридор рыскания», который является динамической шириной автомобиля. На динамическую ширину АТС влияют длина и угловые перемещения автомобиля, поперечные колебания кузова и прицепов автопоездов, конструкция шарнирных соединений прицепов и их количество, исправность и тип тормозного привода. Динамическая ширина существенно зависит от реакции водителя на внешние раздражители. В возникновении реакции организма, а, следовательно, на режимы управления АТС важную роль играют анализаторы центральной нервной системы – вестибулярный, зрительный, кожный и др. [4]. Закономерности и параметры движения в «коридоре рыскания» являются сложными и взаимосвязанными. Одним из вариантов аналитического подхода к решению проблемы безопасности движения в таких случаях является модель бокового заноса относительно оси движения.
Рассматриваем боковую устойчивость АТС без вращения. В этом случае необходима модель распределения коэффициентов сцепления покрытия дороги и шины АТС. Рассмотрим частный случай распределения масс, когда ρ2=a b, т.е. когда радиус инерции автомобиля равен среднему геометрическому между величинами a и b. Отметим, что для этого расстояние a + b между осями автомобиля должно быть меньше его общей длины (это на самом деле имеет место в автомобилях современной компоновки). Тогда корни частного уравнения:
работоспособности. В связи с этим необходимо оценивать практически возможные пределы повышения вибраций, снижающих уровень комфорта движения и свидетельствующих об изменении траектории движения АТС в нежелательном и опасном направлении.
Р 1 =
2 • C n ' ( a + b ) . m • b ’
Р 2 =
2 • C3 ' ( a + b ) m • a
Для примера рассмотрим возможность применения параметров модели автомобиля ГАЗ 3221 «Газель». Технические характеристики, необходимые для расчетов, принимаем в виде: a=2800 мм, b=1900 мм m=3250 кг. Изменение жесткости передней подвески берем в пределах 10-14,4 кН/м, изменение жесткости задней подвески – в пределах 30-34,4 кН/м. Результаты расчетов представлены на рис. 1, 2. Из полученных графиков видно, что при увеличении жесткости увеличивается и частота собственных колебаний, а увеличение массы автомобиля приводит к снижению частоты собственных колебаний.
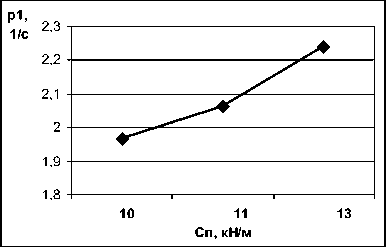
Рис. 1. Графики зависимости собственных частот колебаний кузова от жесткости
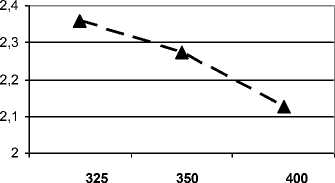
m авт, ( кг *с2/см)
Рис. 2. Графики зависимости собственных частот колебаний кузова от массы автомобиля
Рассмотрим структуру неровности вибропо-
лосы в соответствии с зависимостями: а)
V q(l) = q o • cos(2 -n- • t),
H
б)
2 n x q = q o (1 - cos ), H
где q 0 – амплитуда отклонения поверхности от средней линии; V – скорость АТС; H – шаг неровности; х – пройденный путь; t – время прохождения неровности.
Канал вибрации включает в себя колесо, корпус, амортизаторы и водителя АТС. По модели одночастотного колебания без демпфирования амплитуда колебаний водителя запишем в форме:
Y e = q 0
p 2 p 1 2 - p 2,
Выбор параметров виброполосы проводим при условии одночастотного колебания АТС. Это значительно упрощает задачу, но позволяет установить предельные значения виброскорости и виброускорения, действующие на физиологическую систему водителя с целью обеспечения адекватного управления АТС.
Повышение уровня вибрации возможно лишь до определенного предела, достижение которого связано с отрицательным влиянием на водителя, вызывая ухудшение самочувствия и снижение где р1 – собственная частота колебания АТС; р – частота воздействия.
В реальных условиях система амортизации существенно снижает амплитуду колебаний водителя. Если принять во внимание коэффициент снижения в диапазоне 50-2000, по результатам расчета виброскорости и виброускорения можно установить некомфортную зону движения (см. табл. 1).
Таблица 1. Некомфортная зона движения
|
Параметры, см/с |
Коэффициент снижения |
||||||
|
50 |
100 |
150 |
500 |
1000 |
1500 |
2000 |
|
|
Y в |
0,2 |
0,1 |
0,07 |
0,02 |
0,01 |
0,006 |
0,005 |
|
• "Y в |
104 |
52 |
37 |
11 |
5 |
3 |
2,6 |
Перегрузку в центре тяжести АТС при движении по неровности (формула 3б) с учетом амортизации (обжатие, пневматика) без учета работы амортизатора запишем в следующем виде:
nд
м.д.
2 n V
6 р Y'os и • t-
Максимальная перегрузка равна:
n д max
2^7^- [h -(sм.д. — 5пр. Я где δм.д., δпр – максимально допустимое и фактическое обжатие пневматика; g – 9,8 м/с2; h – 2q0.
Меру «неудобства» устанавливаем в пределах по октавным полосам частот при синусоидальном воздействии: 16 Гц - Y = 5 см/с; 32 Гц - Y = 3,5 см/с; 63 Гц - Y = 2,5 см/с. при этом амплитуда колебаний составляет: Y1=0,049 см; Y 2 =0,017 см; Y 3 =0,0063 см. Время воздействия вибрации менее 10 мин.
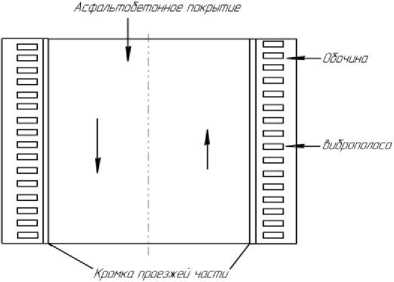
Рис. 3. Схема нанесения виброполос
Сопоставляя результаты, представленные в табл. 1, и меры дискомфорта, определяем, что коэффициент снижения амплитуд колебаний по принятой модели изменяются в пределах от 50 до 150. Это позволяет принять решение о назначении параметров виброполосы: шаг 20 см, глубина 5 см, длина полосы 1 км. Схема нанесения шумовых полос представлена на рис. 3 [5].
В дальнейшем предполагается продолжение исследований воздействия виброполосы на АТС и водителя.
Список литературы Исследование параметров виброполосы с помощью математической модели
- Новости в дорожном деле: Научно-технический информационный сборник/ФГУП «ИНФОРМАВТОДОР». -М., 2007. Вып. 2. 60 с.
- Юшков, Б.С. Исследование долговечности дорожной горизонтальной разметки в климатических условиях Урала/Б.С. Юшков, А.М. Бургонутдинов, В.С. Юшков//Международная заочная научная конференция. Технические науки: проблемы и перспективы, г. Санкт-Петербург, март 2011г. С. 208-212.
- Поезжаева, Е.В. Роботизация нанесения дорожной горизонтальной разметки/Е.В. Поезжаева, В.С. Юшков//Известия Самарского научного центра Российской академии наук. 2011. Т. 13, № 1. С. 586-589.
- Юшков, В.С. Горизонтальная разметка дорог по Европейскому типу//Сборник трудов V Международной научно-практической конференции «Научное творчество XXI века». -Красноярск, 2012. Т. III. С. 320-325.
- Юшков, Б.С. Разметка автомобильных дорог с применением шумовых полос/Б.С. Юшков, В.С. Юшков//Материалы международной заочной научно-практической конференции «Вопросы науки и техники». -Новосибирск, изд-во «ЭКОР-книга», 2012. С. 85-88.
