Исследование повышающего преобразователя напряжения с переключением при нулевых значениях тока

Автор: Горяшин Н.Н., Зорин А.Н.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (47), 2013 года.
Бесплатный доступ
Рассматриваются способы управления повышающим преобразователем напряжения (ПН) с переключением ключевых элементов при нулевых значениях тока. Предложена математическая модель данного ПН, на основании которой показано, что по сравнению с традиционным импульсным ПН исследуемый тип преобразователей обладает большим коэффициентом демпфирования как замкнутая система регулирования.
Повышающий преобразователь напряжения, резонансный преобразователь
Короткий адрес: https://sciup.org/148177010
IDR: 148177010 | УДК: 621.314
Research of boost converter with switch at zero current
Methods of zero-current-switch boost converter control are analyzed in this article. Mathematical model of such converter is proposed. The authors show that the proposed converter under closed loop control has higher damping factor as compared with conventional step-up boost converter under the same conditions.
Текст научной статьи Исследование повышающего преобразователя напряжения с переключением при нулевых значениях тока
Необходимость увеличения мощности оборудования, которое входит в космические спутниковые системы, ставит задачу увеличения удельных энергетических характеристик систем электроснабжения космических аппаратов (СЭС КА). В качестве вторичных источников электропитания СЭС КА используются импульсные преобразователи напряжения (ПН). Для увеличения удельной мощности ПН необходимо увеличивать частоту преобразования, что в классических схемах ПН приводит к увеличению мощности потерь на переключение ключевых элементов (КЭ). К настоящему времени опубликовано много работ, где рассматриваются различные типы ПН с резонансным контуром (РК) в цепи силовых ключей, которые можно разделить на два больших класса: ПН, использую- щие режим переключения КЭ при нулевых значениях тока (ПНТ-преобразователи), и ПН, использующие режим переключения КЭ при нулевых значениях напряжения (ПНН-преобразователи) [1; 2]. Это два основных режима работы КЭ с использованием явления резонанса.
Можно выделить следующие типы высокочастотных ПН с использованием РК: резонансные, квазире-зонансные, с резонансным переключением. Квазире-зонансные ПН (преобразователи с дозированной передачей энергии), как и традиционные преобразователи с широтно-импульсной модуляцией, характеризуются однонаправленной передачей энергии в нагрузку. Методика переключения при нулевом напряжении и при нулевом токе применима ко всем основным способам импульсного преобразования электрической энергии: понижающим, повышающим и инвертирующим преобразователям, а также прямоходовым, обратноходовым, полумостовым и мостовым инверторам [3].
Таким образом, возможным решением обозначенной проблемы является применение методики переключения при нулевом токе, особенностью которой является снижение потерь мощности при переключении и, как следствие, увеличение КПД, а также возможность увеличения частоты преобразования, что в свою очередь увеличивает удельные энергетические характеристики. Так как через ключи протекает ток резонансного контура, имеющий синусоидальный характер, то улучшается электромагнитная совместимость (ЭМС) источника питания с приемопередающим оборудованием. Однако резонансный контур оказывает влияние на динамические характеристики источника. Целью данной работы было исследование этого влияния.
Примером ПНТ-преобразователя может служить повышающий преобразователь напряжения с широтно-импульсной модуляцией (ШИМ) и переключением при нулевом токе, предложенный в [4]. Упрощенная электрическая схема такого ПН представлена на рис. 1, а диаграммы работы – на рис. 2.
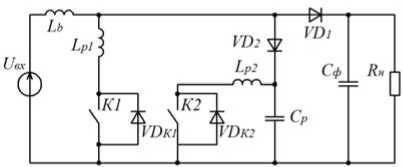
Рис. 1. Схема повышающего ПНТ-преобразователя напряжения с ШИМ
Один цикл работы данного преобразователя можно разбить на девять этапов.
Этап 1 ( T 0– T 1). До момента Т 0 входной ток I вх протекает через выпрямительный диод VD1. В момент времени Т 0 включается главный ключ К 1 и выходное напряжение прикладывается к резонансной индуктивности L р 1. Ток через К 1 и L р1 линейно увеличивается до момента, когда он достигает значения I вх . Это момент времени Т 1 .
Этап 2 ( T 1 – T 2 ). Входной ток протекает через К 1 и L р 1. В этом режиме выходной диод остается запертым и напряжение на конденсаторе фиксирует выходное напряжение.
Этап 3 (T2–T3). В момент времени Т2 включается вспомогательный ключ К2 и Ср разряжается через него. Когда напряжение на конденсаторе достигает нуля, в момент времени Т3 включается диод VD2 и режим заканчивается.
Этап 4 (T3–T4). В момент времени T3 диод VD2 начинает проводить, а конденсатор Ср заряжается отрицательным напряжением. Токи, протекающие через ключи, уменьшаются, и этот режим закончится, когда ток через главный ключ достигнет нуля. Так как диод VD2 проводит ток, то напряжение на диоде VD1 увеличивается, а напряжение на конденсаторе уменьшается.
Этап 5 ( T 4– T 5). В момент времени T 4 ток через К 1 достигает нуля и встречно-параллельный диод VDК 1
начинает проводить.
Этап 6 ( T 5 – T 7 ). В момент времени T 5 ток через К 2 достигает нуля и встречно-параллельный диод VD К 2 начинает проводить. В момент времени T 6 , когда ток через К 1 и К 2 достигает отрицательного пика, сигналы управления затворами К 1 и К 2 становятся запирающими и оба ключа выключаются при нулевом токе.
Этап 7 ( T 7 – T 8 ). Конденсатор C р заряжается в процессе резонанса с L р1. Этот режим закончится, когда ток через встречно-параллельный диод VDК 1 достиг-
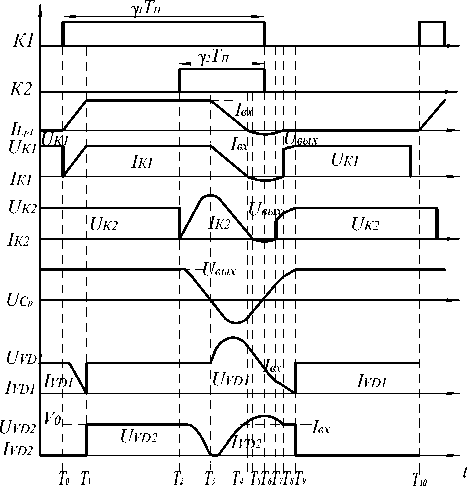
Рис. 2. Временные диаграммы режимов работы силовой части
нет нуля.
Этап 8 ( T 8 – T 9 ). Входной ток протекает через VD 2, заряжая C р. Напряжение на конденсаторе линейно возрастает, пока в момент времени T 9 не достигнет U вых .
Этап 9 ( T 9 – T 10 ). Когда U C р достигнет U вых , VD 2 закроется и VD 1 начнет проводить. Так как напряжение C р фиксируется на U вых , то VD 2 выключается при нулевом напряжении. В течение режима I вх протекает на выход через VD 1.
Далее для анализа динамических характеристик системы необходима динамическая модель системы.
Воспользовавшись методикой, описанной в [5], получим передаточную функцию ПН. Для этого составим уравнения для элементов вектора состояния ( U c ф = U вых , I L b = I вх ):
•
U вых
-^ вых + I Lb- - I L1- t G [0, T ),
C ф R н C ф C ф 1
, 'ы 1 G [ T , T 9 ),
C ф R н
-U L,
—вых + -L^t G [T9, Tn ).
C ф R н C ф
I Lb = ^
(U вх U вых ) t g [0, T ),
L b
U вх Lb ( U вх
t G T , T 3 ),
Lb
U )
— t G [ 7 3 , T 9 ),
(Uвх__Uвых ) , ГТ T \ t G [ T9, Tn ).
Lb
У =
Из полученных уравнений составим системы уравнений для каждого временного интервала:
|
- |
1 1 " |
0 -1 _ L b |
- 1 |
0 J J 0 |
UBX вх I Lp1 U CP _ |
|||||||
|
• U вых • _ I Lb _ |
= |
C » R н C 2* 0 _ Lb _ |
U вых _ I Lb _ |
+ |
C ф 0 |
’ |
- (2) |
|||||
|
U вых = |
[ 1 |
0 ] |
U вых _ I Lb _ |
, |
||||||||
|
• и |
f^^ °! |
Vu 1 |
■ 0 |
||
|
вых |
= |
C ф R н |
вых |
+ |
1 |
|
I Lb _ |
_ 0 0 _ |
_ I Lb _ |
_ L b |
U вых
|
0 0 ! |
UBX вх |
||
|
0 0 |
I Lp 1 |
, |
|
|
J |
U CP _ |
- (3) |
|
• и |
'X2- "1 |
Vu 1 |
■ 0 |
||
|
вых |
= |
C ф R н |
вых |
+ |
1 |
|
_ I Lb _ |
_ 0 0 _ |
_ I Lb _ |
_ L b |
-1
L b _
U вх
I Lр 1
.Ucp J r (4)
UBH x= [ 1 0 ] вых
-1
U вых
_ I Lb
C ф R н
C ф
U вых
U вх
-
Lb
I Lb
+
Lb
I Lр 1
,
. UCP J
UBHx=[1 0]
вых
Далее будем использовать обозначение матриц пространства состояния.
Для учета времени работы на каждом этапе используем весовые коэффициенты:
T- = k, ,
1 T П
T 3
-
T 1
T П
= y' - k 2 - k1 ,
T 9
-
T П
T
— = k 3 + k 2,
T — T
T^ = 1 -Y-k 3 .
T П
Уравнения пространства состояний для всего периода преобразования имеют вид
A 1 k1 + A 2 ( y' - k 2 - k 1 ) + A 3 ( k 3 + k 2 ) + + A 4 ( 1 -y'- k 3 )
" B 1 k 1 + B 2 ( y' k 2 - k 1 ) + B 3 ( k 3 + k 2 ) +’
_+ B 4 ( 1 -y- k 3 )
C1 k1 + C2 (y - k2 - k1) + C3 (k3 + k2) + +C4 (1 -y'-k3)
1 x +
D 1 k1 + D 2 ( У'- k 2 - k 1 ) + D 3 ( k 3 + k 2 ) + + D 4 ( 1 -y'- k 3 )
u .
Заменим каждую переменную суммой постоянной части и малых возмущений, составляющими второго порядка пренебрегаем:
A 1 k 1 + A 2 ( y - k 2 - k 1 ) + A 3 ( k 3 + k 2 ) + + A 4 ( 1 - y - k 3 )
B1 k1 + B 2 ( У - k 2 - k 1 ) + B 3 ( k 3 + k 2 ) + + B 4 ( 1 - y - k 3 )
+ [ ( A 2 - A 4 ) X + ( B 2 - B 4 ) U Jy =
= M 1 x + M 2 u + M 3 y ,
"C1 k1 + C2 (y - k2 - k1) + C3 (k3 + k2) +
_ _+ C 4 ( 1 -y- k 3 )
u +
D 1 k 1 + D 2 ( y - k 2 - k 1 ) + D 3 ( k 3 + k 2 ) + + D 4 ( 1 - y - k 3 )
+ [ ( C 2 - C 4 ) X + ( D 2 - D 4 ) U Jy =
= M 4 x + M 5 u + M 6 y .
u +
Применим преобразование Лапласа к системе уравнений:
sx = M,x + M2u + M 3 y, I
_ L 2_ 3 r (9)
y = M 4 x + M 5 u + M 6 y .
Решим систему уравнений относительно y :
y = M 4 [ sE - M 1 ]- 1 [ M 2 u + M 3 y ] + M 5 u + M 6 y . (10)
Из этого выражения можно получить передаточную функцию (ПФ):
W ( s ) = y
У u = 0
= M 4 [ sE - M 1 ] - 1 M 3 + M 6 .
Найдем значение матриц,
ченном выражении:
M 1 =


используемых в полу-

M3 =

^^^^^^в

к = 1 — кз + к =1 —
arccos ( a ) + СД вых
® экв I вх
M 4 = [ 1 0 ] , M 6 = [ 0 ] , (12)
1 — Л—РZ2— (1+a)x Lp 1 + Lp 2^
arccos ( a ) — arccos ( P ) ^
. ®экв ,
T П
Подставив (12) в (11), получим ПФ:
s
—(k—y)
к — y
C ф
+ c R
s
+ v +И2£ C ф R н L b C ф
— I Lb C ф
Lb _
L b U вых
1 — s---------7 ----Rн (к — y)2 J k — y
L b C ф, + s____L b - + 1
(k — y) RH (k — y)
W nH ( V ) = K пн
L р 1 I вх U вых
1 ^ НФ v т Кз s 2 + 2 ^ Т кз v + 1,
где
U вых L b
= ; 7НФ =
k — y Rh (к — y)
PbC^; E =. ^ (к — y)2 2R •(к—y) ^cф
Для обеспечения стабилизации выходного напряжения необходимо ввести контур отрицательной обратной связи. На рис. 3 показаны варианты структурных схем стабилизатора напряжения с одноконтурным (рис. 3, а ) и двухконтурным (рис. 3, б ) способом управления.
Для обеспечения устойчивости системы в нее введено корректирующее устройство (КУ). На рис. 4 представлены частотные характеристики до введения корректирующего устройства и после. В данном случае в качестве КУ используется пропорционально-интегро-дифференцирующий регулятор [1].

б
Рис. 3. Структурная схема ИСН с одноконтурным ( а ) и двухконтурным ( б ) способом управления
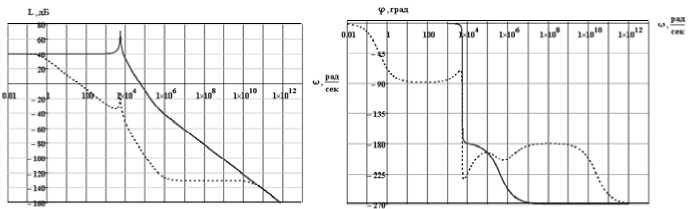
Рис. 4. Частотные характеристики ИСН
Для оценки качества регулирования было проведено численное моделирование в пакете Micro-Cap 9.0. На рис. 5 показаны переходные процессы выходного напряжения при изменении выходной мощности от 150 до 300 Вт при U ВХ = 50В ПНТ-преобразователя и классического преобразователя. Из рис. 5 видно, что ПНТ-преобразователь имеет больший коэффициент демпфирования по сравнению с классическим преобразователем при данном способе управления.
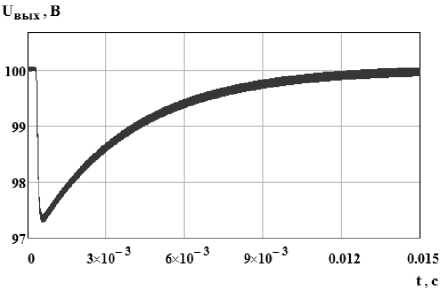
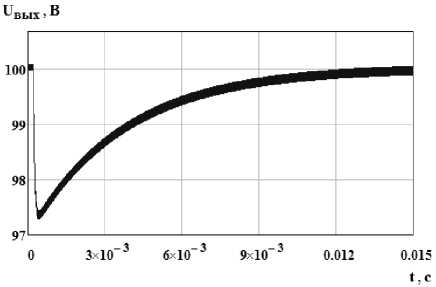
Для улучшения качества управления введем местную обратную связь по среднему току дросселя [6], как показано на рис. 3, б . Из рис. 6 видно, что при данном способе управления переходные процессы классического и ПНТ преобразователя существенно не отличаются и отклонение от заданного напряжения составляет менее 3 %.
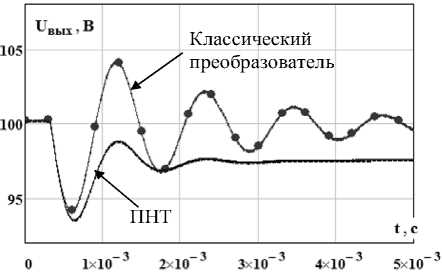
Рис. 5. Переходной процесс выходного напряжения при изменении выходной мощности от 150 до 300 Вт
а
б
Рис. 6. Переходной процесс выходного напряжения при изменении выходной мощности: а – классический преобразователь; б – ПНТ-преобразователь
Так как на входе реального преобразователя стоит солнечная батарея (СБ), которая является нелинейным источником тока с ненулевой выходной емкостью, то динамический анализ далее будем проводить, заменив идеальный входной источник напряжения моделью СБ.
Вольт-амперная характеристика СБ описывается следующим уравнением:
I(U ) = I к.з ( 1 + e f ( U ) ) , (17)
где f (U) =
( U - U хх ) ln(1 - i )
U хх ( j - 1 ) ;
|опт; j = Uonm, (18) IКЗ Uхх здесь IКЗ – ток короткого замыкания СБ; Uхх – напряжение холостого хода СБ; Iопт, Uопт – ток и напряжение в оптимальной рабочей точке. Выбираем следующие значения параметров СБ: Iк.з = 7,5А, Uхх = 80 В, Iопт = 6А, Uопт = 70 В, С = 1 мкФ.
На рис. 7 показан переходной процесс выходного напряжения при изменении выходной мощности от 150 до 300 Вт и моделью СБ в качестве первичного источника. Сравнивая переходные процессы на рис. 6 и 7, можно сделать вывод, что замена СБ источником напряжения не оказывает заметного влияния на динамику системы.
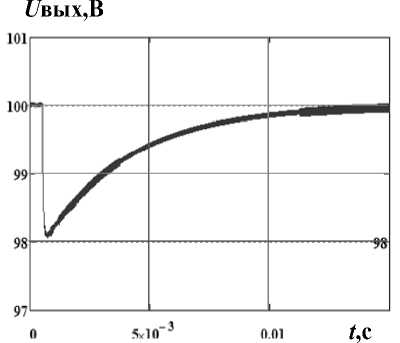
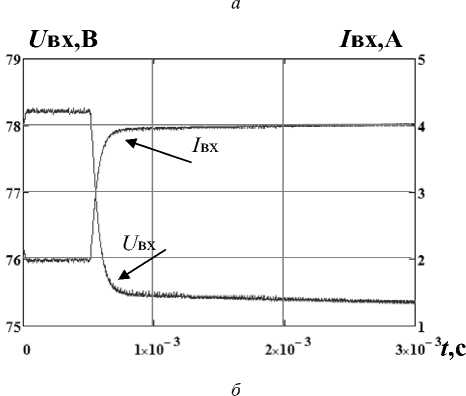
Рис. 7. Переходные процессы выходного напряжения ( а ) входного напряжения и входного тока ( б )
На рис. 8 показаны диаграммы токов через индуктивности РК и напряжений на ключах имитационной модели преобразователя, построенной в пакете схемотехнического моделирования Micro-Cap 9.0, а на рис. 9 показаны их экспериментальные осциллограммы. Высокая степень совпадения формы и параметров сигналов в силовой части ПН за один цикл преобразования подтверждает адекватность имитационной модели, а значит и правомерность ее использования для анализа динамических режимов ПН данного типа.
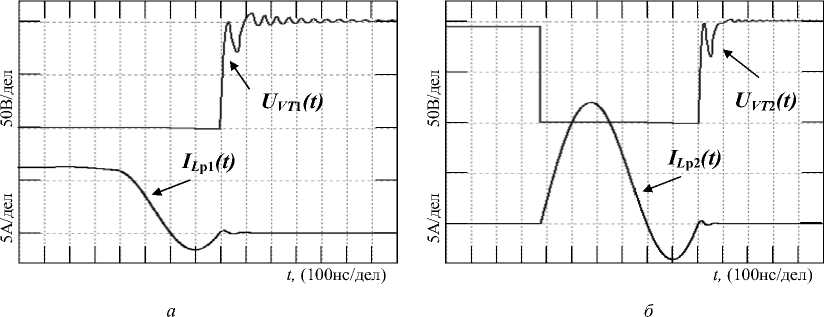
Рис. 8. Диаграммы токов через индуктивности РК и напряжений на ключах
U vt i (t)
U VT2 (t)

I l pi (t)

t, (150нс/дел)
а
Рис. 9. Осциллограммы токов через индуктивности РК и напряжений на ключах
t, (150нс/дел)
б
Результаты моделирования показали, что резонансный контур увеличивает коэффициент демпфирования системы. При одноконтурном регулировании колебательность переходных процессов значительно меньше по сравнению с классическим ШИМ преобразователем при прочих равных условиях. Двухконтурный способ управления не дает существенной разницы между исследуемым ПН и традиционным. Это позволяет применять оба способа регулирования для предлагаемого ПН.
