Исследование процедуры совместного обнаружения сигнала, оценивания дисперсии шума и тактовой синхронизации в многолучевом канале

Автор: Котлова Татьяна Викторовна, Халилов Ринат Рашидович
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Теоретические основы технологий передачи и обработки информации и сигналов
Статья в выпуске: 2 т.8, 2010 года.
Бесплатный доступ
В статье описан алгоритм тактовой синхронизации, проведено статистическое имитационное моделирование предлагаемого алгоритма, описана схема работы устройства совместного обнаружения сигнала, оценивания дисперсии канального шума и тактовой синхронизации, основой которого является повторяемость фрагментов принимаемого многолучевого сигнала.
Сигнал, обнаружение, тактовая синхронизация, дисперсия канального шума, имитационное моделирование, многолучевость
Короткий адрес: https://sciup.org/140191385
IDR: 140191385 | УДК: 621.396
Signal determination procedure, estimation of noise dispertion and bit timing via multipath channels
This article represents bit timing algorithm, statistic simulation of suggested algorithm, operation scheme of joint signal detecting device, as well as estimation of channel noise dispersion and bit timing which is based on segment repetition of sensed multipath signal.
Текст обзорной статьи Исследование процедуры совместного обнаружения сигнала, оценивания дисперсии шума и тактовой синхронизации в многолучевом канале
Развитие систем связи заставляет постоянно совершенствовать средства приема информации, обеспечивая все более скоростную передачу информации по каналам связи. Увеличение скорости передачи приводит к приему сигнала в условиях многолучевого распространения, что требует изменения алгоритмов работы всех блоков системы приема информации [1-2].
В представленной статье предлагается алгоритм совместного обнаружения сигнала, оценивания дисперсии канального шума и тактовой синхронизации, основанный на структурном анализе принимаемого сигнала.
В [3] представлен алгоритм тактовой синхронизации, обеспечивающий нахождение границ тактовых интервалов на основе поиска совпадающих фрагментов сигнала.Однакоэтот алгоритм имеет ряд недостатков, отмеченных в [4], основной из которых – невозможность получения оценки границы тактового интервала при отсутствии знаний о форме реакции кана- ла на переданный элемент сигнала. Предлагаемый в данной статье алгоритм лишен этого недостатка, хотя основой этого алгоритма, как и в [3], является повторяемость частей принимаемого сигнала.
Запишем сигнал на входе приемного устройства в следующем виде:
L
-
z (t)=Es (t т) -t i (t)+n (t), (1)
l =1
где s ( t ) - передаваемый сигнал, ni ( t ) - шум, Y (t) - коэффициент передачи канала, являющийся медленно меняющейся функцией времени, L – число лучей, l – номер луча, τ l – задержка во времени l -го луча.
Пусть d (t) = zjM+i (t) - ^m+i (t) (2)
-
« ц ( t ) = z jM + i ( t ) + z kM + i ( t ) (3)
/ ( t ) - разность сравниваемых фрагментов сигнала, а ц ( t ) - сумма этих же фрагментов, где к = 0,1 ... n - 2, j = k + 1, k + 2 ... n — 1, i = 0,1 ... M -1, z jM + i ( t ) = z ( t + ( jM + i ) A T ) , z ^ kM + i ( t ) = z ^ ( t + ( kM + i ) AT ) , A T - требуемая
T точность синхронизации AT = —, M - количес-M тво смещений в пределах тактового интервала.
Каждому сочетанию параметров j , к и i соответствует определенное значение ц , причем
^ = 0 ; 1 ...
n
-
n
M -1. Для дальнейшего ана лиза вычислим величины D^ и А^ :
a 2
D ^ = Jd ( t )| dt , (4)
a 2
A ц = J ^ц ( t)| dt ■ (5)
При совпадении разнесенных фрагментов сигнала значение D ^ в отсутствие шума равно нулю, а при его наличии стремится к удвоенному значению энергии шума на интервале анализа [5].
Для более контрастного определения границы тактового интервала при фазовой модуляции предлагается использовать не D ^ , а отношения D μ
—, так как значения также необходимы для об-
A наружения сигнала на входе приемника [6]. При этом позиционность модуляции не имеет значения для логики построения алгоритма. При использовании только D алгоритм тактовой синхронизации, представленный в данной статье, станет инвариантным к виду модуляции.
Предлагаемый алгоритм требует нахождения
Dμ такого значения Н - Н, при котором А" минимально. Это значение в отсутствие слеμдующей повторной комбинации позволит определить границу тактового интервала:
D μ ц = arg min—-, μ A μ
ц = arg min D . μ μ
При реальной передаче информации, ввиду случайности сообщения,на отсутствие следующей повторной комбинации нельзя полагать-ся,поэтому найденное значение должно стать отправной точкой для нахождения границы тактового интервала. Саму обработку необходимо проводить поблочно,используя для вынесения решения q интервалов анализа.
По найденному значению |1 определим значения j, к, при которых проявились совпадающие фрагменты сигнала. При этом зафиксируем интервал, равный по величине тактовому интервалу, в котором было найдено совпадение фрагментов принимаемого сигнала. Таким образом, для каждого интервала анализа используется следующий набор фрагментов сигнала z-jM+i (t) и z-M+i (t), и соответствующие им значения отношений интегралов квадратов модулей разности и интегралов квадратов модулей суммы анализируемых фраг-
D.+i ментов сигнала —— , где g = A^
μ
M
M .
Математическое ожидание минимальных отношений интегралов квадратов модулей разности и суммы фрагментов сигнала также должно быть минимальным.
Исходя из этого, запишем решающее правило для алгоритма нахождения границ тактовых интервалов по нескольким анализируемым фрагментам в следующем виде:
i = arg min V —+^ (8)
i, q q,S+i
/ = argmin ^ D q , q+ i ■ (9)
q
Для выявления качественных характеристик работы устройства тактовой синхронизации было проведено статистическое имитационное моделирование (СИМ) при различном отношении сигнал/шум и различном количестве блоков q принимаемого сигнала z ( t ) на интервале анализа qN .
Моделирование проводилось следующим образом. Для каждого блока, используемого в анализе, сначала генерировалась последовательность в N = 15 элементов сигнала s ( t ) , который умножался на коэффициент передачи канала у ( t ) . Коэффициент передачи канала формировался как случайная величина, распределенная по рэлеевскому закону [7]. Произведение s ( t ) и Y ( t ) складывалось со сгенерированной последовательностью гауссовского шума ni ( t ) . Таким образом, был сформирован сигнал zr ( t ) , поступающий на вход анализируемого устройства тактовой синхронизации. Далее проводились действия в соответствии с формулами (2)-(9). Найденное значение временного сдвига сохранялось в памяти ЭВМ. Данные операции проводились 1000 раз. Таким образом, были сформированы гистограммы вероятности правильного определения границы тактового интервала в зависимости от количества блоков, используемых для анализа, и отношения сигнал/шум. Полученные гистограммы представлены на рис.1 и 2.По условиям эксперимента граница тактового интер-
T вала была смещена на — (i = 2), а память канала принята равной 2. 10
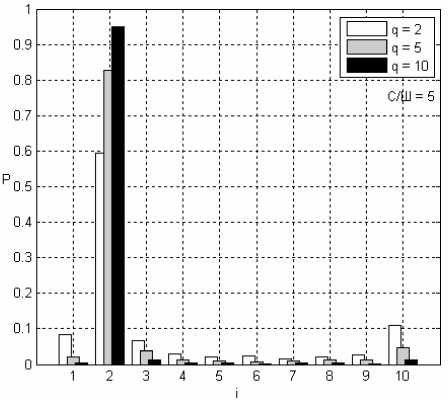
Рис. 1. Гистограмма вероятности правильного определения границы тактового интервала в зависимости от количества используемых блоков
Анализ рис. 1-3 позволяет сделать выводы:
-
1. Точность определения границ тактового интервала зависит от соотношения сигнал/шум и количества анализируемых блоков. При необходимости можно найти компромисс между отношением сигнал/шум и количеством используемых блоков.
-
2. Решения, выносимые алгоритмами, находятся в окрестности истинной границы тактового интервала.
-
3. Алгоритмы с решающими правилами (8)(9) различаются незначительно, хотя алгоритм с решающим правилом (8) имеет небольшой выигрыш.
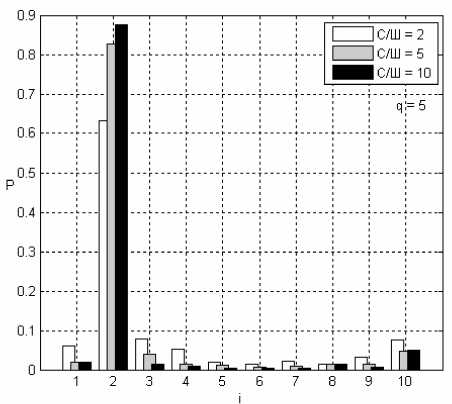
Рис. 2. Гистограмма вероятности правильного определения границы тактового интервала в зависимости от соотношения сигнал/шум
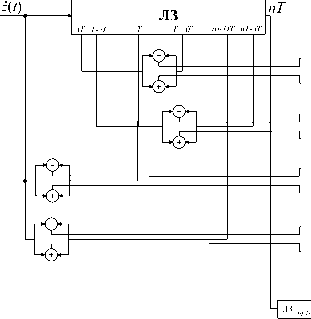
Совместная схема работы устройства, использующего алгоритм тактовой синхронизации и построенного в соответствии с решающим правилом (8), а также использующего алгоритмы обнаружения сигнала и оценивания дисперсии канального шума, описанные в [5-6], представлена на рис. 4.
НИНИ—* ЧИН®—*

ЧИН®—* ЧИН®—* чпни— чин®—* чгме— ЧИНИ—*
I УВИД -
-И Демодулятор --► {О^}
Рис. 4. Схема работы устройства обнаружения, оценивания дисперсии канального шума и тактовой синхронизации
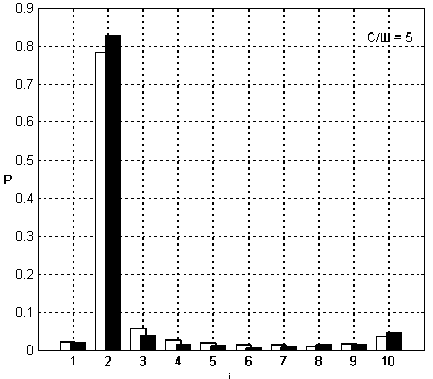
Рис. 3. Гистограмма вероятности правильного определения границы тактового интервала решения по формуле (8) и (9)
Схема устройства обнаружения,оценивания дисперсии канального шума и тактовой синхронизации работает следующим образом.Смесь сигнала,прошед-шего многолучевой канал,и шума z (t) поступает на вход линии задержки (ЛЗ)с отводами.Количество отводов в соответствии с алгоритмом равно nM,в блоках сложения и вычитания определяются базовые элементы анализа dц (t) и aa^ (t). Эти элементы поступают каждый на свой блок определения модуля,после чего полученные значения возводятся в квадрат и интегрируются на интервале Ta . Таким образом,на схему анализа предварительных данных (САПД)поступают необходимые исходные данные для работы алгоритмов обнаружения сигнала,оценивания дисперсии канального шума и тактовой синхронизации.В САПД на интервале времени qnT определяются по формуле (6) совпадающие фрагменты.При наличии сигнала в со- ответствии с алгоритмом работы обнаружителя,пред-ставленного в [6],определяется наличие или отсутс-твиесигналанавходе приемника.При наличии сигнала САПД запоминает полученные значения D^+i и A^+i и продолжает набор статистических данных,соответс-твующих с требуемым значениям погрешности определения мощности шума и точности синхронизации. После этого в соответствии с решающим правилом (8)и алгоритмом оценивания мощности шума,пред-ставленным в [5],определяется значение временного сдвига сетки тактовых импульсов передатчика и при-емника,и искомое значение мощности шума в канале связи.Сведения о наличии сигнала,мощности шума и о временном рассогласовании передатчика и приемника поступают на вход устройства выдачи исходных данных (УВИД),которое в соответствии с логикой работы демодулятора выдает требуемую информацию.
Список литературы Исследование процедуры совместного обнаружения сигнала, оценивания дисперсии шума и тактовой синхронизации в многолучевом канале
- Николаев Б.И. Последовательная передача дискретных сообщений по непрерывным каналам с памятью. М.: Радио и связь, 1988. -262 с.
- Финк Л.М. Теория передачи дискретных сообщений. М.: Сов. радио, 1970. -728 с.
- Кузнецов А.И., Халилов Р.Р. Тактовая синхронизация в каналах с межсимвольной интерференцией на основе структурного анализа многолучевого сигнала//ИКТ. Т.4, №1, 2007. -С. 41-43.
- Котлова Т.В., Халилов Р. Р. Оценка порогового уровня различения «ненулевых» фрагментов сигнала для алгоритма тактовой синхронизации, основанного на повторяемости частей принимаемого многолучевого сигнала//Сб. докладов ВНТК «Актуальные проблемы ракетно-космической техники и ее роль в устойчивом социально-экономическом развитии общества». Самара, 2009. -С. 209-210.
- Халилов Р. Р. Оценивание дисперсии шума в каналах с МСИ с использованием метода дифференциального анализа.//Сб. докладов IX МНТК Проблемы техники и технологий телекоммуникаций. Казань, 2008. -С. 219-220.
- Халилов Р. Р. Обнаружение сигналов в каналах с межсимвольной интерференцией и шумом.//Сб. докладов V НТК Системы наблюдения, мониторинга и дистанционного зондирования Земли. Москва, 2008. -С. 76 -80.
- Кловский Д.Д., Сойфер В.А. Обработка пространственно-временных сигналов. М.: Связь, 1976. -208 с.
