Исследование регулирования соотношения и суммарного массового расхода компонентов топлива маршевого двигателя перспективного разгонного блока

Автор: Балакин С.В., Панасик Д.С., Фдоров В.И.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Тепловые, электроракетные двигатели и энергоустановки летательных аппаратов
Статья в выпуске: 2 (41), 2023 года.
Бесплатный доступ
В статье рассмотрены принципы работы каналов регулирования суммарного массового расхода и соотношения компонентов топлива высокоэкономичного многофункционального двигателя перспективного разгонного блока, представлена методика исследования влияния дестабилизирующих факторов на погрешность поддержания соотношения и суммарного массового расхода компонентов топлива. Аналитически доказана техническая возможность достижения погрешности поддержания соотношения и суммарного массового расхода компонентов 0,8% (при требуемом значении 1%), что позволяет существенно уменьшить гарантийный запас топлива разгонного блока.
Многофункциональный двигатель, разгонный блок, регулирование, поддержание, соотношение, компоненты топлива, суммарный массовый расход, погрешность
Короткий адрес: https://sciup.org/143180650
IDR: 143180650 | УДК: 629.764.016.7
A study into controlling the ratio and the total mass flow rate of propellant components for the main engine of an advanced upper stage
The paper presents operating principles of the path for controlling the ratio and the total mass flow rate of propellant components in the high-efficiency engine for an advanced upper stage, and a procedure for studying the effects of destabilizing factors on the accuracy of maintaining the ratio and the total mass flow rate of propellant components. It provides an analytical demonstration of the feasibility of achieving the 0.8% accuracy of maintaining the ratio and the total mass flow rate of propellant components (while the requirement is 1%), thus enabling a significant reduction in the safe propellant margin for the upper stage.
Текст научной статьи Исследование регулирования соотношения и суммарного массового расхода компонентов топлива маршевого двигателя перспективного разгонного блока

БАЛАКИН С.В.

ПАНАСИК Д.С.
ФЁДОРОВ В.И.
БАЛАКИН Станислав Викторович — доктор технических наук,
BALAKIN Stanislav Viktorovich — Doctor of Science (Engineering),
Head of Department at RSC Energia, Professor at MIEM HSE,
Широкое применение кислородноуглеводородных разгонных блоков (РБ) среднего класса типа ДМ с двигателем 11Д58М разработки РКК «Энергия» в течение многих десятилетий (с 1974 г.) было предопределено высокими энергетическими характеристиками двигателя, использованием в нём экологически чистых компонентов топлива (КТ), возможностью многократного включения двигателя в полёте и его высокой надёжностью [1]. Весьма эффективным стало применение модификации этого РБ в ракете космического назначения «Зенит-3SL» для программы «Морской старт».
Однако анализ возможных путей дальнейшего совершенствования энергетических и эксплуатационных характеристик РБ ДМ- SL комплекса «Морской старт» показал, что наиболее эффективным является применение в нём (как и в других РБ типа ДМ) вместо маршевого двигателя 11Д58М перспективного многофункционального двигателя [2].
Для корректного запуска, работы и останова жидкостного ракетного двигателя необходимо регулирование его параметров. Регулирование тяги ракетного двигателя необходимо для поддержания требуемого значения тяги при изменении условий работы двигательной установки и для изменения тяги с целью обеспечения заданного режима полёта летательного аппарата. Регулирование соотношения компонентов, поступающих в двигатель, необходимо по двум причинам:
-
1) для поддержания соотношения компонентов в камере в пределах, которые обеспечивают надёжный режим работы с высокими энергетическими показателями, надёжным охлаждением и устойчивостью рабочего процесса;
-
2) для обеспечения в конце работы двигателя одновременной выработки окислителя и горючего из баков или доведения их невыработанных остатков до минимума.
Существующие способы регулирования тяги ракетных двигателей в широком диапазоне (например, глубокое дросселирование) приводят к существенному снижению экономичности и увеличению массогабаритных характеристик двигательных установок [3]. Поэтому обеспечение эффективного регулирования тяги ракетных двигателей является одной из важных задач, возникающих при создании и использовании ракетно-космической техники.
Регулирование расходов компонентов, поступающих в камеру двигателя, осуществляют регуляторы. Регуляторы, поддерживая постоянство расходов окислителя и горючего, обеспечивают одновременно поддержание тяги и соотношения компонентов на заданных уровнях. Оба регулятора могут получать соответствующие сигналы на перенастройку от системы управления [4].
Постановка задачи
Жидкостный ракетный двигатель при изготовлении настраивается на соотношение компонентов топлива с точностью ±2–4%. В полёте под действием различных возмущений соотношение КТ двигателя может изменяться в большем диапазоне, что может привести к преждевременному израсходованию одного из КТ до момента выключения двигателя. Так как двигатель не может работать на одном компоненте (происходит несанкционированный останов или взрыв двигателя), то необходимо резервировать гарантийные запасы топлива. Для уменьшения гарантийного запаса топлива целесообразно применение систем управления соотношением КТ. Эти системы основываются на измерении уровней компонентов в баках или на измерении секундных расходов топлива через двигатель [5].
Основные составляющие погрешности регулирования соотношения расхода КТ и суммарного расхода КТ через двигатель 11Д58М обусловлены рядом дестабилизирующих факторов, действующих на всём участке полёта РБ и приводящих к изменению начальной массы РБ. К таким факторам можно отнести:
-
• погрешности датчиков расхода горючего и окислителя;
-
• погрешности датчиков температуры горючего и окислителя;
-
• погрешность начальной угловой установки приводов автоматики (привода регулятора и привода дросселя).
Для обеспечения регулирования соотношения расхода КТ и суммарного расхода КТ через двигатель 11Д58М в качестве датчиков температуры горючего и окислителя используются датчики ТС-36-1 и ТС-37-1.
Погрешность поддержания заданных значений массового соотношения расходов КТ и погрешность поддержания заданного значения суммарного массового секундного расхода КТ через многофункциональный двигатель на установившемся режиме его работы составляют 1%. В связи с этим целью данной статьи является исследование степени влияния дестабилизирующих факторов на погрешность регулирования соотношения компонентов и их суммарного массового расхода. Кроме того, необходимо аналитически доказать, что погрешность регулирования соотношения КТ через многофункциональный двигатель не будет превышать 0,8%, что позволит существенно уменьшить гарантийный запас КТ перспективного РБ и, соответственно, повысить его эффективность.
Так как влияние погрешности начальной угловой установки приводов автоматики незначительно, при проведении данных исследований оно не рассматривалось.
Для проведения аналитических расчётов было выбрано математическое программное обеспечение Mathcad .
Многофункциональным перспективным двигателем управляет система управления двигателем, в состав которой входят:
-
• датчики расхода окислителя (ДРО) и горючего (ДРГ);
-
• датчики температуры окислителя (ДТО) и горючего (ДТГ);
-
• блок управления двигателем (БУД);
-
• привод дросселя соотношения компонентов;
-
• привод регулятора суммарного расхода КТ;
-
• бортовая кабельная сеть.
Для обеспечения регулирования соотношения расхода КТ и суммарного расхода КТ через многофункциональный двигатель в качестве ДТГ и ДТО используются современные датчики ТП-198-02 [6], которые имеют меньшую погрешность измерения температуры, чем датчики ТС-36-1 и ТС-37-1, установленные на двигателе-прототипе 11Д58М.
Блок управления двигателем является прибором автоматического управления, обеспечивающим развёртывание циклограмм запуска и останова двигателя, регулирование расходов компонентов через него на основном режиме работы, а также аварийное выключение двигателя при нештатном функционировании [7].
Система управления двигателем содержит несколько функционально автономных каналов, выполняющих следующие задачи управления:
-
• канал управления электропневмоклапанами двигателя;
-
• канал аварийного выключения двигателя в зависимости от состояния сигнализаторов давления;
-
• канал начальной установки дросселя соотношения расходов КТ;
-
• канал регулирования соотношения массовых расходов КТ;
-
• канал регулирования суммарного массового расхода КТ.
В данной статье будут рассмотрены принципы действия каналов регулирования суммарного массового расхода КТ и соотношения массовых расходов КТ, а также проведены исследования влияния дестабилизирующих факторов на погрешность регулирования суммарного массового расхода и соотношения КТ.
Принцип действия канала регулирования соотношения расходов компонентов топлива через двигатель
Канал регулирования соотношения массовых расходов КТ через двигатель (рис. 1) представляет собой замкнутую линейную дискретную систему автоматического управления, использующую принцип косвенного определения со- отношения нентов по расходов клонения заданного, отработку
массовых расходов комподанным измерения объёмных и цифровое вычисление от- соотношения расходов от а также пропорциональную регулирования с исполь- зованием обратной связи.
Регулированию подлежат массовые расходы КТ. Но так как измерить массу КТ сложно, на практике измеряют объём КТ. Соотношение массовых расходов КТ можно определить с помощью следующей зависимости:
K
m
.
m о
.
m г
.
V оγо
.
V гγг
где m .о и m .г — массовые расходы окис.-лит.еля и горючего соответственно; V о и V г — объёмные расходы окислителя и горючего соответственно; γо и γг — плотность окислителя и горючего соответственно.
Для перехода от измеряемых объёмов к массе проводятся вычисления на основе следующей формулы, определяющей текущие значения плотности окислителя (горючего) γо(г) при текущем значении температуры Т о(г) окислителя (горючего):
γ о(г) γ о(г) ном γ о(г) о(г) о(г) ном ,
где γо(г) ном — номинальное значение плотности окислителя (горючего); Kγо(г) — относительный температурный коэффициент плотности окислителя (горючего); То(г) ном — номинальное значение температуры окислителя (горючего).
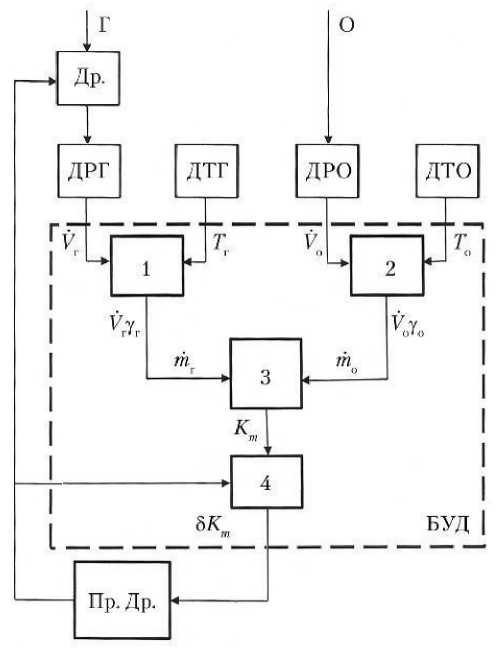
Рис. 1. Функциональная схема канала регулирования соотношения компонентов через двигатель: Г — горючее; О — окислитель; Др. — дроссель; ДРГ и ДРО — датчики расхода горючего и окислителя соответственно; ДТГ и ДТО — датчики температуры горючего и окислителя соответственно; Пр. Др. — привод дросселя; БУД — блок управления двигателем, включающий в себя: 1 — определитель массового расхода m. г горючего; 2 — определитель массового расхода т. o окислителя; 3 — определитель соотношения массовых расходов окислителя и горючего Km; 4 — определитель отклонения соотношения массовых расходов окислителя и горючего 5 K от его заданного значения; .. m
V г и V o — объёмные расходы горючего и окислителя соответственно; T г и T o — температура горючего и окислителя соответственно; у г и y o — плотность горючего и окислителя соответственно (рисунок создан авторами )
Температуру КТ измеряют ДТО и ДТГ, представляющие собой термометры сопротивления. Значение сопротивления чувствительных элементов датчиков температуры окислителя и горючего можно записать в следующем виде:
R о(г)
= R
о(г) ном
+ K Т о( Т г) ( Т о(г) – Т о(г) ном )
где R о(г) ном — номинальное сопротивление чувствительного элемента датчика температуры окислителя (горючего);
KТ о( Т г) — чувствительность сопротивления элемента датчика температуры (изменение величины его сопротивления при изменении температуры на 1 °С).
Значение сопротивления датчиков температуры преобразуется в усилителях-преобразователях БУД (в данном случае — в переменное напряжение, частота которого пропорциональна температуре КТ) и передаётся в блок вычислителя для дальнейшего преобразования и определения значения температуры горючего и окислителя. Данный способ преобразования сигнала от датчика температуры ТП-198-02 для многофункционального двигателя имеет меньшую погрешность измерения температуры КТ, в отличие от способа преобразования сигнала от датчиков ТС-36-1 и ТС-37-1 с использованием аналого-цифрового преобразователя сигнала для двигателя-прототипа 11Д58М. Это позволяет получить более точное значение температуры КТ и, соответственно, более точное значение их массы.
Объёмные расходы КТ измеряются ДРО и ДРГ турбинного типа с частотным выходом. Сигналы с датчиков расхода усиливаются в БУД и передаются в управляющие блоки в виде частоты выходного сигнала f о(г), пропорциональной расходу компонентов топлива:
.
о(г) о(г) о(г) ,
где B о(г) — индивидуальный тарировоч-ный коэффициент датчика расхода окислителя (горючего).
С учётом уравнений (2), (3) и (4) соотношение массовых расходов (1) приобретает следующий вид:
K
m
о г γ о ном
г о γ г ном
K
1 + γ о ( R – R ) о о ном
K
Т о
K
1 + γ г ( R – R )
г г ном
K
Т г
При отклонениях температуры КТ от номинальных значений происходит изменение соотношения расходов КТ от заданного значения, в результате чего появляется рассогласование в отклонениях массовых расходов КТ через двигатель.
Также данное отклонение происходит при отклонении значений тарировочных коэффициентов датчиков расходов.
Таким образом, формула (5) приобретает следующий вид:
K
m
= K
m ном
(1 + δ K m ),
где Km ном — номинальное массовых расходов КТ, Кт ном =
соотношение о ном г ном γ о ном
г ном о ном γ г ном
,
здесь f о ном и f г ном — номинальная частота выходного сигнала датчиков расхода окислителя и горючего соответственно; B г ном и B о ном — номинальные значения индивидуального тарировочного коэффициента датчиков расхода горючего и окислителя соответственно; δ Km — относительное отклонение соотношения массовых расходов КТ от номиналь-
ного значения.
Учитывая отклонения значений температуры КТ и тарировочных коэффициентов датчиков расходов КТ от заданных значений, отклонение соотношения массовых расходов КТ приобретает следующий вид:
δ K
f г ном
m
f о ном
1 + δ B г f о
1 + δ B о f г
+
×
K
γ о ( R о – R о ном K
Т о
K
1 + γг (R – R г г ном
K
Т г
)
–1.
)
Блок управления двигателем определяет длительность и знак управляющего воздействия, которое через выходной модуль выдаётся на привод дросселя. Длительность команды пропорциональна углу, на который необходимо повернуть вал дросселя.
Привод дросселя поворачивает вал дросселя и, как следствие, изменяется значение соотношения расходов КТ.
Процесс регулирования осуществляется циклически. В каждом цикле вы-
числяется текущее значение соотношения КТ и сравнивается с заданным значением. По их разности вычисляется угол поправки на положение дросселя. По углу и известной скорости вращения вала дросселя определяется
длительность команды. Процесс продолжается, пока разность не войдёт в заданный допуск.
Принцип действия канала регулирования суммарного массового расхода компонентов топлива
Канал регулирования суммарного массового расхода КТ через двигатель (рис. 2) представляет собой замкнутую линейную дискретную систему автоматического управления, использующую измерение объёмных расходов, аналоговое измерение температур компонентов и цифровое вычисление отклонения суммарного расхода от заданного, а также временную отработку вычисленной команды регулирования.
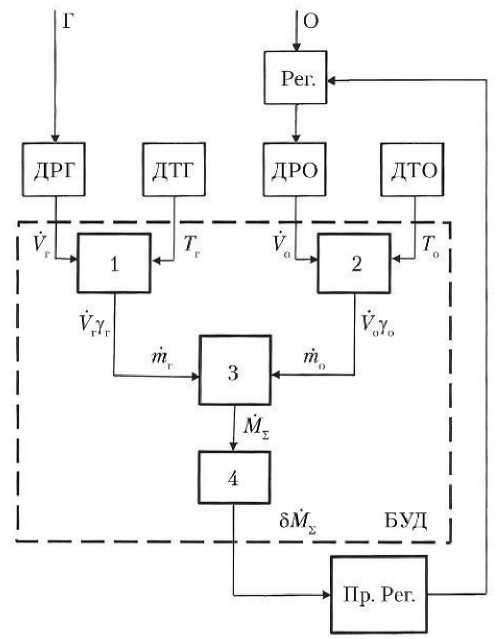
Рис. 2. Функциональная схема канала регулирования суммарного массового расхода компонентов через двигатель: Г — горючее; О — окислитель; Рег. — регулятор; ДРГ и ДРО — датчики расхода горючего и окислителя соответственно; ДТГ и ДТО — датчики температуры горючего и окислителя соответственно; Пр. Рег. — привод регулятора; БУД — блок управления двигателем, включающий в себя: 1 — определитель массового расхода т. г горючего; 2 — определитель массового расхода т. o окислителя; 3 . — определитель суммарного массового расхода КТ M Σ ; 4 — определител. ь отклонения суммарного ма.ссово.го расхода КТ δ M Σ от его заданного значения; V г и V o — объёмные расходы горючего и окислителя соответственно; T г и T o — температура горючего и окислителя соответственно; γ г и γ o — плотность горючего и окислителя соответственно (рисунок создан авторами)
При регулировании суммарного массового расхода КТ M Σ используются те же датчики температуры и объёмных расходов КТ, которые используются в канале регулирования соотношения КТ. Соответственно, преобразованные сигналы с датчиков аналогичны.
Суммарный массовый расход КТ вычисляется по следующей формуле:
КТ от заданного и вырабатывает управляющую команду, которая через выходной модуль передаётся на привод регулятора. Длительность команды пропорциональна величине отклонения суммарного расхода.
M . Σ = m .о + m .г.
Температура КТ измеряется ДТО и ДТГ, представляющими собой термометры сопротивления. Значения сопротивления
датчиков температуры определяются согласно выражению (3).
Объёмные расходы компонентов топлива измеряются ДРО и ДРГ турбинного типа с частотным выходом
согласно выражению (4).
Учитывая приведённые аналитические зависимости, представим суммарный массовый расход компонентов через двигатель в следующем виде:
f о
= γ
Σ B о ном o
K
1 + γо (R – R ) + о о ном
K
Т о
f г
Н--у
B γ г
г ном
K
+ γ г
K Т г
( R г – R
г ном
) .
Отклонение суммарного массового расхода компонентов от его номинального значения определяется по соотношению:
.
δ M Σ =
.
M о ном
f о
M 1 + δ B f
Σ ном о о ном
K
1 + γ о ( R – R о
K
Т о
о ном
+
.
M г ном
.
M
Σ ном
1 + δ B г
f г
f г ном
×
K
+ γ г ( R
K г
Т г
– R
г ном
) – 1,
где M .о ном и M .г ном — номинальные значения массового расхода окислителя и горючего соответственно; M Σ ном — номинальное значение суммарного массового расхода КТ.
Блок управления двигателем определяет отклонение суммарного расхода
Исследования погрешности поддержания соотношения и суммарного массового расхода компонентов топлива через двигатель
Ключевыми элементами в функциональных каналах регулирования соотношения и суммарного массового расхода КТ являются объёмные датчики расхода и температуры. Именно по данным, полученным с датчиков, осуществляется регулирование соотношения и суммарного массового расхода компонентов так, чтобы при изменениях температуры окислителя и горючего было обеспечено поддержание соотношения КТ и их суммарного массового расхода в заданных допусках.
Таким образом, результирующая погрешность поддержания соотношения и суммарного массового расхода компонентов топлива напрямую зависит от погрешности измерений датчиками расхода и температуры.
В данном разделе статьи рассматривается зависимость отклонения соотношения массовых расходов КТ и отклонения их суммарного массового расхода, рассчитываемых по формулам (6) и (8), от погрешностей, вносимых датчиками. Каждая из погрешностей считается случайной и независимой.
Согласно требованиям, предъявляемым к БУД, относительная погрешность поддержания соотношения массовых расходов и относительная погрешность поддержания суммарного массового расхода КТ не должны превышать 1%.
Рассмотрим канал регулирования соотношения массовых расходов КТ. В контуре регулирования соотношения массовых расходов КТ двигателя применены датчики ДРГ и ДРО. Эти датчики измеряют объёмный расход, а не массовый. Объёмные расходы измеряются по следующему принципу: одна порция КТ определённого объёма на входе равна одному импульсу на выходе. Погрешность измерения объёмного
расхода зависит от погрешности проведения тарировки датчика расхода. Таким образом, ключевым параметром датчика расхода является значение тарировочного коэффициента В о(г).
Помимо датчиков расхода в канале регулирования используются датчики температуры. В БУД используются более современные датчики температуры ТП-198-02 [6], которые имеют меньшую погрешность измерения температуры, чем датчики ТС-36-1 и ТС-37-1. Эти датчики представляют собой термометры сопротивления. Информация от них используется для определения плотности КТ [8, 9]. Ввиду того, что массовый расход компонентов топлива — это произведение плотности топлива на его объёмный расход, погрешность измерений массового расхода также зависит и от погрешности измерений плотности компонентов, зависящей, в свою очередь, от погрешности измерений температуры датчиком.
Относительная погрешность соотношения массовых расходов КТ δ Km рассчитывается по формуле (6).
Так как отношения частот являются константами и примерно равны 1, получаем следующие значения относительной погрешности соотношения массовых расходов КТ, выраженные в процентном отношении:
-
• отклонение, обусловленное влиянием погрешности ДРГ,
Так как погрешности являются случайными величинами и они не кор-релированы друг с другом, то суммирование следует осуществлять не алгебраически, а геометрически [10, 11]:
δ Km = δ Km 21 + δ K m 22 + δ K m 23 + δ K m 24 = 0,721.
В канале регулирования суммарного расхода КТ используются те же датчики температуры и объёмных расходов КТ, что и в канале регулирования соотношения КТ, поэтому влияние составляющих погрешностей измерения суммарного расхода будет таким же. Относительная погрешность суммарного расхода компонентов топлива δM Σ рассчитывается по формуле (8). Отношения частот также являются константами и примерно равны 1, однако отношения номинальных массовых расходов не равны 1, поэтому их следует учитывать при расчёте погрешности.
Получаем следующие значения относительной погрешности суммарного расхода КТ, выраженные в процентном отношении:
-
• отклонение, обусловленное влиянием погрешности датчика расхода горючего,
. M . 1 M
δ M = о ном + г ном – 1 = –0,267;
Σ1 M . 1 + δ B M
Σ ном о Σ ном
δ Km 1 = (1 + δ B г) – 1 = 0,6;
• отклонение, обусловленное влия-
нием погрешности ДРО,
• отклонение, обусловленное влиянием погрешности датчика расхода окислителя,
1 δ Km 2 = 1 + δ B о
1 = –0,375;
• отклонение, обусловленное влия-
нием погрешности ДТО,
δK m3
K
1 + γ о ( R – R ) o o ном
Т o
– 1 = 0,13;
• отклонение, обусловленное влия-
нием погрешности ДТГ,
δ K m 4
K
1 + γ г ( R – R )
г г ном
K
Т г
– 1 = 0,044.
. M.
δ M = о ном + г ном – 1 = –0,108;
Σ 2 M . M 1 + δ B
Σ ном Σ номг
• отклонение, обусловленное влиянием погрешности датчика температуры окислителя,
. M.
δ M = о ном 1 + γ о ( R – R ) +
Σ3 M . K о о ном
Σ ном Т о
M .
+ г ном – 1 = 0,093;
M .
Σ ном
• отклонение, обусловленное влиянием погрешности датчика температуры горючего,
. δ M Σ4
..
MM о ном г ном
+ ×
.
M
Σ ном
.
M
Σ ном
×
K
1 + γ г ( R г – R г ном ) K
1 = –0,012.
Результирующая погрешность суммарного расхода КТ, согласно работам [10, 11], равна
δ M . Σ = δ M Σ 21 + δ M Σ 22 + δ M Σ 23 + δ M Σ 24 = 0,303.
Выводы
В данной статье представлены аналитические зависимости и описаны принципы действия каналов регулирования суммарного массового расхода и соотношения массовых расходов КТ многофункционального двигателя перспективного разгонного блока.
С помощью аналитических зависимостей выявлено, что погрешности датчиков расхода и датчиков температуры, а также способ преобразования аналогового сигнала от датчика тем- пературы влияют на результирующую погрешность поддержания суммарного расхода и соотношения КТ. При этом аналитически доказано, что суммарная погрешность регулирования соотношения КТ не превышает заявленные 0,8%. Достижение данного значения суммарной погрешности обусловлено использованием в т. ч. современных датчиков ТП-198-02, которые имеют меньшую погрешность измерения температуры, чем датчики ТС-36-1 и ТС-37-1, установленные на двигателе-прототипе 11Д58М, а также преобразованием сигнала от датчиков температуры в переменное напряжение, частота которого пропорциональна температуре КТ.
Приведённые выше результаты позволяют сделать вывод, что система управления многофункциональным двигателем перспективного разгонного блока, построенная с использованием блока управления двигателем, позволит снизить отклонения в поддержании соотношения компонентов и их суммарного расхода по отношению к требуемому значению, что приведёт к снижению массы гарантийных запасов топлива.
Список литературы Исследование регулирования соотношения и суммарного массового расхода компонентов топлива маршевого двигателя перспективного разгонного блока
- Алиев В.Г., Легостаев В.П., Лопота В.А. Создание и пятнадцатилетний опыт эксплуатации ракетно-космической системы «Морской старт» / / Космическая техника и технологии. 2014. № 2(5). С. 3-13. EDN: SMJHHV
- Аверин И.Н., Егоров А.М., Тупицын Н.Н. Особенности построения, экспериментальной отработки и эксплуатации двигательной установки разгонного блока ДМ-SL комплекса «Морской старт» и пути её дальнейшего совершенствования / / Космическая техника и технологии. 2014. № 2(5). С. 62-73. EDN: SMJHJT
- Ермаков П.А. Особенности регулирования тяги в жидкостных ракетных двигателях / / Актуальные проблемы авиации и космонавтики: сборник материалов V Международной научно-практической конференции, посвящённой Дню космонавтики. В 3-х томах. 2019. Т. 1. С. 210-211. EDN: MOKTIF
- Ахметшин К.Ш., Кирюхин С.Ю., Рябинин А.С. Сравнительный анализ способов регулирования тяги жидкостных и твердотопливных ракетных двигателей // Решетнёвские чтения. 2013. Т. 1. С. 110-111. EDN: SJCIAH
- Ишбулатов А.Р., Кузнецова Н.Д. Система управления расходованием топлива // Технические науки в России и за рубежом: материалы VII Международной научной конференции. М.: Издательский дом «Буки-Веди», 2017. С. 29-31. EDN: ZTAWIF
- Датчик температуры ТП-198. Технические условия БЫ2.821.198 ТУ.
- Соколов Б. А., Тупицын Н.Н. Исследование возможности создания на базе кислородно-углеводородного двигателя 11Д58М высокоэкономичного многофункционального безгазогенераторного ракетного двигателя с кислородным охлаждением // Космическая техника и технолог и и. 2019. № 2(25). С. 67-79. EDN: EFOXZM
- ТУ 38.001244-81. Нафтил. Технические условия.
- ГОСТ 12308-89. Топлива термостабильные Т-6 и Т8В для реактивных двигателей. Технические условия. М.: Изд-во стандартов, 1987. 10 с.
- Справочник по физико-техническим свойствам криогеники / Под ред. М.П. Малкова. 3-е изд., переработанное и дополненное. М.: Энергия, 1985. 432 с.
- Рабинович С.Г. Погрешности измерений. Л.: Энергия, 1978. 262 с. Статья поступила в редакцию 30.11.2022 г. Окончательный вариант — 26.01.2023 г.
