Исследование режима преобразования координат вычислителя пилотажно-навигационного комплекса

Автор: Пирматов Н.Б., Рискинбаев Фахриддин Фарход Ли
Журнал: Мировая наука @science-j
Рубрика: Основной раздел
Статья в выпуске: 6 (39), 2020 года.
Бесплатный доступ
В статье изучено пилотажно-навигационного комплекса современных летательных аппаратов. Пилотажно-навигационный комплекс ПНК самолета обеспечивает решение задач навигации и пилотирования в условиях, соответствующих требованиям второй категории ИКАО. Общая навигационная задача заключается в безопасном выводе самолета в заданную точку пространства, с заданной скоростью по установленной или оперативно выбранной пространственно-временной траектории. В результате конструктивного расчёта выявлено, что предлагаемое бортовое НВУ ПНК имеет меньшие размеры блока, чем базовый, что особенно важно с точки зрения требований компактности авиационного оборудования без уменьшения его надёжности. Рассмотрено режима преобразования координат вычислителя пилотажно-навигационного комплекса (ПНК), а также модернизировано принципиальная электрическая схема счётчика индикатора- вычислителя в соответствии со структурной и функциональными схемами.
Навигации, комплекс, самолета, параметр, координат, корпус
Короткий адрес: https://sciup.org/140265624
IDR: 140265624 | УДК: 629.621.064.5
Research of the mode of transformation of coordinates of the calculator of the aircraft-navigation complex
The article examined the flight-navigation complex of modern aircraft. The flight and navigation complex of the PNA aircraft provides a solution to the problems of navigation and piloting in conditions that meet the requirements of the second category of ICAO. The general navigation task is to safely bring the aircraft to a given point in space, with a given speed along an established or operatively selected spatio-temporal trajectory. As a result of a constructive calculation, it was revealed that the proposed onboard NVU PNK has smaller block sizes than the basic one, which is especially important from the point of view of the requirements for the compactness of aviation equipment without reducing its reliability. The mode of coordinate transformation of the flight-navigation complex (PNK) calculator is considered, and the circuit diagram of the indicator-calculator counter is modernized in accordance with the structural and functional schemes.
Текст научной статьи Исследование режима преобразования координат вычислителя пилотажно-навигационного комплекса
В настоящее время все большее распространение получают бортовые компьютеры и интегрированные вычислительные комплексы навигации и самолетовождения.
На современном этапе развития Гражданской авиации все большее значение для повышения безопасности полетов приобретает работа в области обеспечения надежности и совершенствования авиационной техники. Пилотажно-навигационный комплекс (ПНК) современных летательных аппаратов осуществляет автоматическое и полуавтоматическое самолетовождение по запрограммированным траекториям с выдерживанием требуемых норм вертикального и горизонтального эшелонирования на всех этапах полета, включая заход на посадку в пределах до метеоминимума по категории IIIA. Это очень ответственные и сложные операции, которые должны выполняться с высокой точностью и надёжностью, даже в самых сложных метеорологических условиях. Одним из основных направлений решения проблемы повышения регулярности полетов пассажирских самолетов в условиях непрерывного возрастания их интенсивности является создание и внедрение в эксплуатацию более современных автоматических бортовых систем управления (АБСУ), позволяющих снизить существующие посадочные минимумы погоды и обеспечить безопасность воздушного движения.
Пилотажно-навигационный комплекс ПНК самолета обеспечивает решение задач навигации и пилотирования в условиях, соответствующих требованиям второй категории ИКАО. Общая навигационная задача заключается в безопасном выводе самолета в заданную точку пространства, с заданной скоростью по установленной или оперативно выбранной пространственно-временной траектории.
ПНК самолета относится к комплексам автоматизированного самолетовождения по участкам маршрута. Общую задачу пилотирования также можно разделить на главную - стабилизация пространственного положения самолета на заданной траектории - и ряд частных задач, обусловленных необходимостью контроля и управления бортовыми устройствами и взаимодействием с другими целевыми комплексами самолета.
Главную навигационную задачу решает навигационный вычислитель, а оператор контролирует правильность ее решения, вводит в навигационный вычислитель программу полета по следующему участку маршрута, управляет работой систем измерения навигационной информации, решает логические задачи навигации по определению необходимости коррекции счисленных координат и курса самолета, управляет процессом коррекции координат и решает все частные навигационные задачи.
Система АБСУ обеспечивающая необходимые характеристики устойчивости и управляемости самолета и ряд режимов автоматического управления полетом, состоит из трех систем:
-
- система траекторного управления (СТУ), служащая для формирования законов управления самолетом по сигналам ПНК и индикации ряда навигационно-пилотажных параметров;
система автоматического управления САУ как исполнительный орган, воздействующий через приводы на органы управления самолетом, автомат тяги (АТ), стабилизирующий заданную приборную скорость полета.
В навигационном вычислителе НВУ-БЗ предусмотрено программирование следующих параметров: текущих прямоугольных координат самолета: вдоль оси маршрута ............ 0^950 км перпендикулярно оси маршрута ............. ±500 км заданного путевого угла (ЗПУ)..................... от 0 до 360° значения линейного упреждения разворота (ЛУР) от 5 до 25 км с дискретностью 5 км.
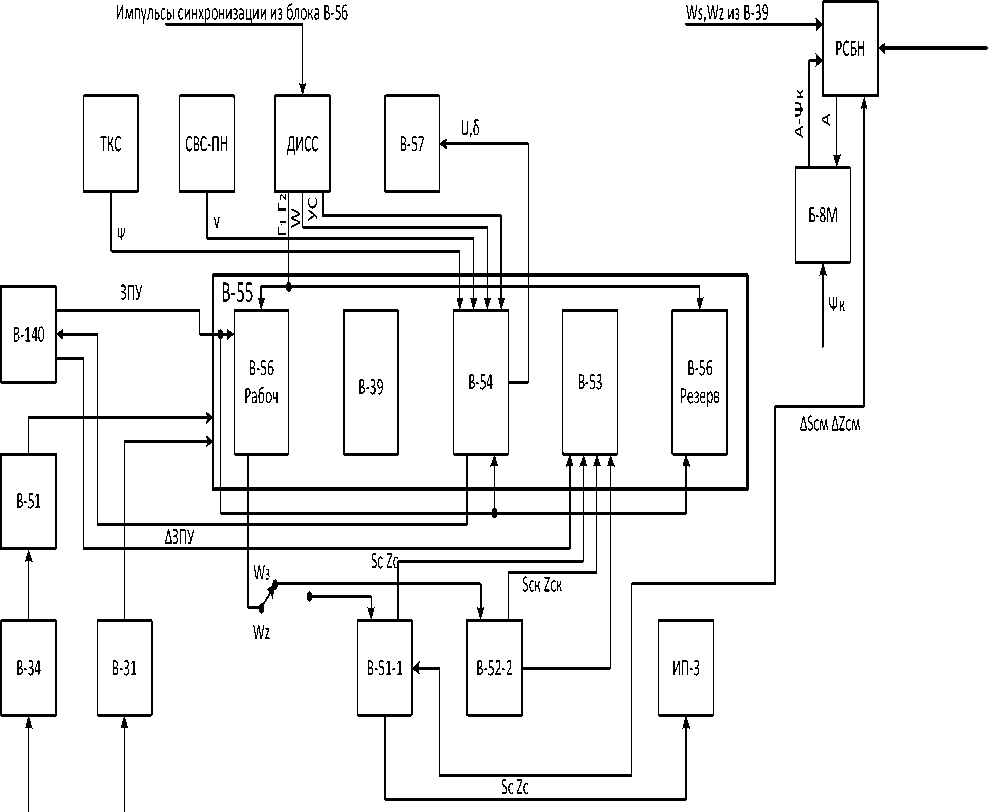
Структурная схема вычислителя НВУ-БЗ и его связи с системами-датчиками приведена на рис. 1.
Навигационное вычислительное устройство (НВУ) НВУ-БЗ предназначено для непрерывного автоматического счисления текущих частноортодромических координат самолета с индукцией их на планшете и выдачи сигналов для автоматического и полуавтоматического управления самолетом.
Навигационный вычислитель функционально сопряжен с угломерно -дальномерной системой, благодаря чему обеспечивается автоматическая коррекция счисленных координат самолета в радиусе действия маяка 10350 км.
Мощность, потребляемая вычислителем, составляет:
-
- по постоянному току - 400 ВТ;
-
- по переменному току - 300 а.
Вес вычислителя с ответными частями штепсельных разъемов (без соединительных кабелей) составляет:
-
- НВУ-Б3 - 69,0 кг.
При последовательном прохождении самолетом всех участков частной ортодромии необходим переход от одной частноортодромической системы координат к другой.
36В 40Гц 27В
Рис.1. Структурная схема вычислителя НВУ-БЗ
Для обеспечения непрерывного и плавного перехода с одной частной ортодромии на другую вычислитель, помимо счисления текущих координат, решает задачу преобразования координат самолета в координаты, вычисленные относительно поворотного пункта следующей частной ортодромии (рис.2.).
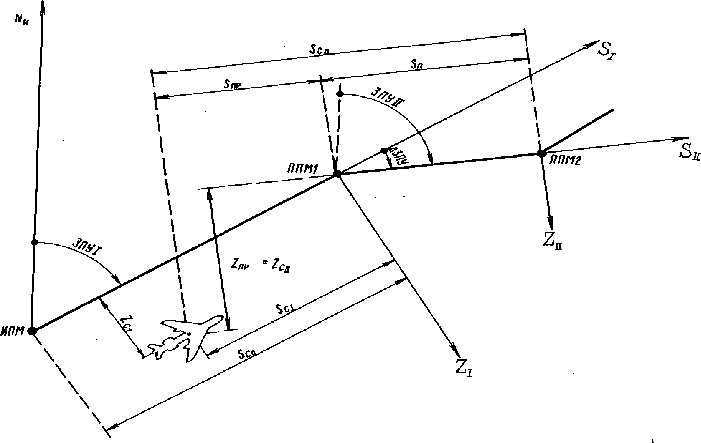
Рис.2. Преобразование координат из одной частноортодромической системы в другую.
Одно из основных направлений модернизации НВУ ПНК выбираем увеличение скорости обработки радиолокационной и радионавигационной информации за счет замены старой элементной базы на новую, что приведет к увеличению быстродействию НВУ ПНК, снижению потребляемой мощности и массы оборудования, а также повышению надежности.
Для увеличения диапазона измеряемых частот координат можно применить предварительный управляемый делитель частоты (рис. 3).
В бортовом НВУ ПНК схема счётчика индикатора-задатчика координат вычислителя собрана на микросхемах и других радиоэлементах, итого 3 микросхем.
Сборка осуществляется на печатной плате из стеклотекстолита. Рассчитаем размеры печатной платы. Площади установки одной микросхемы приведены в таблице ранее.
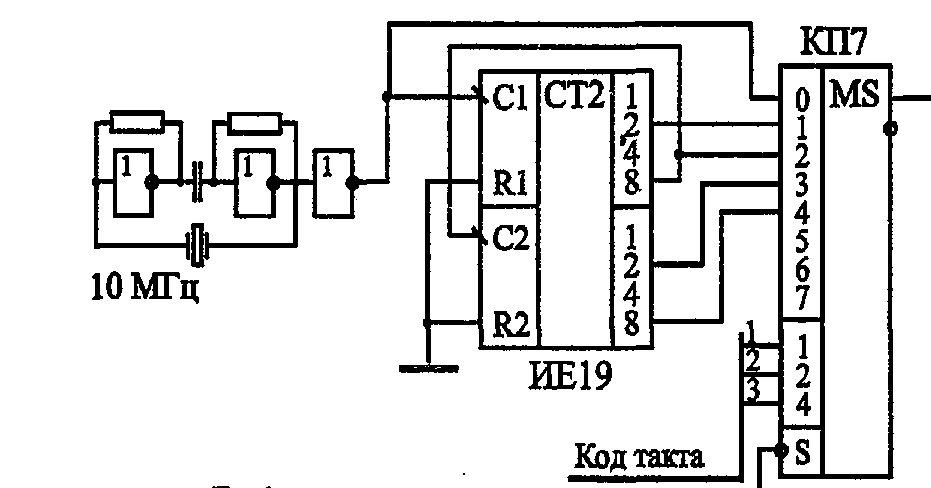
Рис.3. Схема предварительный управляемый делитель частоты
Площади установки одной микросхемы
Таблица 1.
|
Наименование |
Количество (шт.) |
Площадь установки (мм2) |
|
DD1–DD8 ИЕ7 (74VHCT198 ) |
8 |
200 |
|
DD9 ИЕ19 (74VHCT393) |
1 |
200 |
|
DD10 КП7 (74VHCT151) |
1 |
200 |
Наименьшее расстояние между печатными проводниками - 0,1мм. При проектировании печатной платы применяют координатную сетку, имеющую основной шаг 2,5мм. Диаметры отверстий - 0,2-0,4мм. Остальные блоки бортовой МНРЛС также собраны на печатных платах. Все платы помещаются в металлический штампованный корпус, имеющий съёмные боковые и верхнюю крышки для обеспечения доступа при регулировке и ремонте. Размеры корпуса: длина 520мм., ширина 180мм., высота 120мм. Корпус устанавливается на амортизационную раму.
В результате конструктивного расчёта выявлено, что предлагаемое бортовое НВУ ПНК имеет меньшие размеры блока, чем базовый, что особенно важно с точки зрения требований компактности авиационного оборудования без уменьшения его надёжности. Рассмотрено режима преобразования координат вычислителя пилотажно-навигационного комплекса (ПНК), а также модернизировано принципиальная электрическая схема счётчика индикатора-задатчика координат вычислителя в соответствии со структурной и функциональными схемами.
Было изучено путем модернизации существующей схемы счётчика индикатора-задатчика координат НВУ, заменой аналогового индикатора на цветной цифровой, с выводом цифровой информации о пилотажнонавигационной обстановке и проверяемых параметров правильности функционирования НВУ ПНК системой встроенного контроля на многофункциональный дисплей. Результатом этого является повышение точности и надежности самолетного НВУ в составе пилотажнонавигационного комплекса, а также снижение его веса и габаритов.
Список литературы Исследование режима преобразования координат вычислителя пилотажно-навигационного комплекса
- Дащенко А.Ф., Кирилов В.Х. и др. MatLab в инженерных и научных расчетах. Монография. - Одесса: Астропринт, 2003. - 214 с.
- Мудров А.Е. Численные методы для ПЭВМ на языках Бейсик, Фортран и Паскаль. - Томск: МП РАСКО, 1991. - 272 с.
- Пис Р.А. Обнаружение неисправности в аналоговых схемах. Перевод с англ. - М.: Техносфера, 2007. - 192 с.
- Пис Р.А. Практическая электроника аналоговых устройств. Поиск неисправности и обработка проектируемых схем. Перевод с англ. - М.: ДКМ Пресс, 2001. - 320 с.
- Проектирование приборов, систем и измерительно-вычислительных комплексов: конспект лекций для студентов специальности 20010365 / сост. В. Н. Шивринский. - Ульяновск: УлГТУ, 2009. - 116 с.
- Р.Г. Закиров. Оптимизация алгоритмов диагностики бортового радиоэлектронного оборудования. Статья в электронном журнале "Труды МАИ" №78, Москва, 2014 (www.mai.ru/science/trudy/).
- Сайдумаров И.М. Оптимальное размещение оборудования пассажирской кабины самолета малой авиации. Материалы международной научно-практической конференции "Инновационные процессы в России и мире", г. Ростов-на-Дону: Издательство Фонд науки и образования, 2015.С.13-17.
