Исследование режимов стационарного движения гибкой нерастяжимой нити на вращающемся шкиве

Автор: Сакевич Валерий Николаевич, Щелкунов Александр Владимирович
Журнал: Вестник Витебского государственного технологического университета @vestnik-vstu
Рубрика: Технология и оборудование легкой промышленности и машиностроения
Статья в выпуске: 2 (17), 2009 года.
Бесплатный доступ
В работе решается теоретически задача о стационарном контурном движении гибкой нерастяжимой замкнутой нити, переброшенной через вращающийся шкив. Рассчитаны области существования таких режимов движения. Показано, что при контурном движении замкнутой гибкой нити в вертикальной плоскости положение шкива относительно замкнутого контура нити, т.е. петля нити, находится над шкивом или под шкивом и не влияет на устойчивость движения нити. Экспериментально обнаружено дестабилизирующее воздействие вибраций на устойчивость стационарных режимов. Источником вибраций являются удары утолщенных участков нити о прижимной ролик. Основные теоретические выводы подтверждены экспериментально.
Движение нерастяжимой нити, текстильные нити, гибкие нити, нерастяжимые замкнутые нити, нерастяжимые нити, замкнутые нити, движение нитей, контурное движение, замкнутые контуры, режимы движения, стационарные режимы
Короткий адрес: https://sciup.org/142184609
IDR: 142184609
Текст научной статьи Исследование режимов стационарного движения гибкой нерастяжимой нити на вращающемся шкиве
Во многих машинах и приборах в качестве элементов конструкции или чувствительных упругих элементов используют абсолютно гибкие стержни, имеющие продольное движение. Классическим примером таких упругих элементов являются передачи с гибкой связью. В текстильной промышленности в последнее время значительно увеличились скорости при намотке в рулоны готовой продукции, которые могут достигать 50—70 м/с. Гибкие нити используют и в системах управления объектами, движущимися по проводам. Скорость движущегося объекта достигает 100 м/с и более, поэтому исследование условий устойчивого движения гибких нитей важно для разработки таких машин и механизмов. В работах [1-3] получены уравнения контурного стационарного движения нити в общем виде и приведены результаты их численного решения.
y
R
A
ω
O
а)
R A
б)
Рисунок 1 – Схема движения гибкой нерастяжимой замкнутой нити
Целью настоящей работы является исследование влияния в вертикальной плоскости взаимного положения шкива и точки приложения равнодействующей сил тяжести замкнутого контура нити, а также больших сил сопротивления на устойчивость контурного движения нити [4].
Рассмотрим задачу о стационарном контурном движении гибкой нерастяжимой замкнутой нити, переброшенной через вращающийся шкив, как показано на рис. 1. Движение происходит в вертикальной плоскости, длина нити ℓ. Пусть нить прижимается к вращающемуся с постоянной угловой скоростью ω шкиву роликом А, причем размером ролика в сравнении с радиусом r шкива можно пренебречь. Вне контакта со шкивом к нити приложены следующие силы, отнесенные к единице длины: сила тяжести q = mQg. где m0 – линейная плотность нити, и сила сопротивления движению R. Будем считать, что вектор R в каждой точке направлен по касательной к нити и постоянен по величине. Дуговую координату s будем отсчитывать от точки А по напрвлению движения нити. Дифференциальные уравнения в случае контурного стационарного движения нити имеют вид [1-3]
G^r^G^/dj^/dS + Р» - 3.
d^r^dy/dj^/cb +fy - О,
(&х/с4з)а + (dy/й'^2 = 1,
где 7^= Г-т^и2, Ох/Й5 = ГОЗИ. QVjQ3 = CQS^ Ж и^ – углы между касательной и осями координат x и y соответственно.
Будем рассматривать два случая положения прижимного ролика относительно шкива: сверху – рис. 1а и снизу – рис. 1б. Для обоих случаев (рис. 1а и рис. 1б)
Ps = -R^^/dj), Fr = -R^Gy/ds) - G.(4)
Уравнения (1) и (2) с учетом проекций силы сопротивления движению нити (4) примут вид:
dCr^dx/^yds- R(dx/^) = 0/(5)
о(Гй(оу/м)Уйг-А(оу^ -9 = 0.(6)
Отметим, что, как следует из уравнений (5) и (6), положение прижимного ролика относительно шкива не влияет на режимы движения нити. Это означает, что точка приложения равнодействующей силы тяжести выше или ниже точки подвеса замкнутой нити не влияет на стабилизацию замкнутого контурного движения.
Интегрируя уравнения (5) и (6), получим
T* Умножая уравнение (5) на dx/ds, а (6) на dy/ds, затем складывая их с учетом сотношения (3) и интегрируя полученное выражение, найдем T:" — R ■ s + c ■ у -h Ca .(9) Исключая натяжение из решений (7) и (8) и разрешая их относительно производных, получим dx'/dj — (Cj, + R ■ ^)/(Cs + q ■ у + К1 з>,(10) йу/йз = (Cn + q ■ s + R ■ y)/(Ca + q ■ у + R ■ s).(11) Уравнение (11) сведем к однородному, вводя новые переменные: s = ^ -b h? у = q + K-(12) где hик – пока ещё неопределенные постоянные. Имеем 05 = й ^ ф» = dQ; подставляя их в уравнение (11), получим d^G^ = (9 ■ 5 + R ■ П + q ■ h + R ■ к + <У/(К ■ 5 + 41 П + R1 ^ + 4" ^ + Cg). (13) Постоянные hик есть решения системы линейных уравнений q-h4-R-k + C2 = Qi K-h + q- k+ = Qi' С учетом выражений (14) уравнение (13) приводится к однородному уравнению oin/fl^ = (d -5 + R ■ nV(R- 5 + q- n> (15) Система (14) не имеет решения, если определитель, составленный из коэффициентов при неизвестных, равен нулю: q£-R£ = 0. При q2-R2 *0система (14) имеет решение fc = (C2-q-Ca.R)/(R2-r), k = (Ca.q-C2.R)/(R2-q2). В уравнении (15) делаем подстановку П =t^, c?r]/^= ^+ 5' (dt/d^). Оно примет вид b+ ^{dt/d^— (^ + R ■ t):/(K + g ■ <1 или ^dt/d^ - <1 ^у(п/ч 10. Переменные разделяются: й£/£ + ^ + Ф/ (^: — 1}я^ = О, где р = R/q. Интегрируем уравнение и, переходя к переменным (12), получим ^-^а-(з- ^2=С4[((у-^ 4(5- J$/((y-y-(»-*№(17) Из выражений (7), (8), (9) с учетом соотношения (3) следует зависимость между величинами x, y и s: (R ■ s 4 q ■ у 4 Са)2 = (Cj. 4 R ■ .т)2 4 (С8 4- q ■ s 4- R ■ у) 2(18) Четыре постоянные находятся из краевых условий. Например для случая, показанного на рисунках 1а и 1б: x(s = 0)= 0, y(s = 0) = 0, x(s = ℓ)= 0, y(s = ℓ) = 0. Получается система уравнений С/ 4 С; 2 “^ =И(19) Cl2 4 Со2 - Сэ2 4 2Czqt - 2CaRt 4 (qOa - (RO2 = 0,(20) (к2 - W(fca- ((- A)^ = [((-к- У(А - fc - (№ - ^(f- к - №.(21) При A = ya и fc = e выражение (21) обращается в тождество, и из соотношений (16) получим Gj = -q€/2, Ca = -R€/2.(22) При этих значениях (22) находится : ^ = T^/DVn7^'(23) Знак произвольной постоянной Qi найдем из условий, что при 5 = (/4 в точке В d.v/ds = 0 , а xB > CJдля рисунка 1а, л?в< 0 для рис. 1б. Из уравнения (10) получаем Ci = -fl'^s, откуда следует,что Ci должно быть отрицательным для схемы рисунка 1а и положительным для схемы рис. 1б. Произвольную постоянную ^4 найдем из уравнения (17): ^(-l)*»^/*(24) Из уравнения (17) получается уравнение для определения ^i (y)> ^ №=-^[(>.-и W/(y J yi)F(25) Определив yto, находим ^), аоегсол-изоаааыисс соотношением (18): x= [±q?VM* ~ 1 -F 2V(Rs 4 qy- R(/2)a- (Rj?4 qs-q(/2)z]/2fl.(26) Натяжение нити (9) Т^= R-84q-y-R(/2, или с учетом, что T^T-maU2 получим T = tKott? 4 H. ■ з 4 q ■ у - Rf/2 ,(27) Дополнительным необходимым условием существования равновесных форм нити (кроме независимости всех величин от времени) является положительность натяжения I". Из выражения (27) следует, что натяжение достигает минимального значения при s = 0, y = 0, т. е. Т = ™оыи- Rf>2 для схем на рис. 1а и 1б. Предельное значение скорости движения нити, при которой возможен стационарный режим движения (возможна равновесная форма при стационарном движении в покоящейся вязкой среде) находим из условия mou* - Rf/2 > O, или, после преобразований, из условия tta/^CWl - ЦЬсЁб^т0) = tta;w - U-bb) > 0. (28) Cчитаем, что сила сопротивления среды R= <ые? пропорциональна квадрату скорости элемента нити [1]. Предельное значение скорости, при котором возможно стационарное движение, получим из (28), т. е. при b < 2 стационарное движение возможно при любой скорости. Отметим, что из выражения (26) следует, что х принимает действительные значения при выполнении условия | p| > 1, или . Из соотношения (29) следует, что стационарное движение нити в поле сил тяжести возможно только при наличии вязкой среды (я^с), что получено в работе [2] при других условиях стационарного контурного движения нити. Рассмотрим движение нити по горизонтальной поверхности. В этом случае силы тяжести нити не дают проекций на ось у. Чтобы исследовать этот случай, необходимо изменить только уравнение (6), принимающее вид ^(Г^б?/^))/^ - Я^.М^) = 5, В полученных решениях положим q = О, Натяжение (9) принимает вид T^sR - я+Г» Из зависимости (18) получается (R- з+Сз^^ + Я-^ + ССп + Я-у)16. Из уравнения (8) с помощью натяжения (31) получим уравнение с разделяющимися переменными Cty/(Cg + ff ■ >'7 = dj/(Ca + ii" 1 ^' Его решение имеет вид (С2 + Яу) = С4(Са + Я-5).. Так как при s = 0 x = 0, y = 0; при s = ℓ x = 0, y = 0, из решения (33) получаем G* =9 Исключая постоянную c. из решения (33), найдем (Cg + ff - Д = 0. Из уравнений (32) и (34) следует (R- s+ <УЯ = в^ + #-^и. Удовлетворяя краевым условиям по Sj получаем из соотношения (35) два уравнения Cg" = <1 1 ,(R'8+03)2 = Cl2 их решение Ci = Т(йГ/2)^= - RMS . Удовлетворяя краевым условиям, получаем из решения (34) c2 = a. Полученные соотношения позволяют полностью описать стационарное движение нити. Предельное значение скорости, при котором возможно стационарное движение в горизонтальной плоскости, получим из формулы (31) с учетом постоянных (37): u2^ 6(8-42)1 - fl,5e[/me) = u2^6(l - S,5b) > D, т.е. при b < 2 стационарное движение возможно при любой скорости. В работе [4] показаны графически области существования таких равновесных форм контурного движения нерастяжимой замкнутой нити в вертикальной и в горизонтальной плоскостях. Для экспериметальной проверки обнаруженных теоретически динамических эффектов была спроектирована, изготовлена экспериментальная установка и поставлен эксперимент. На рис. 2 показана экспериментальная установка. На шкиве 1 замкнутая нить 5 поджимается к шкиву роликами 2. Прижим роликов фиксируется упругим элементом, например, резиновым кольцом или пружиной. На рис. 2 упругий элемент не показан. Механизм 4 позволяет изменять углы наклона движения нити в вертикальной плоскости. Его устройство понятно из рис. 2. Конструкция установки позволяет ориетировать замкнутое кольцо нити как в вертикальной, так и в горизонтальной плоскости. С помощью источника питания возможно регулировать обороты электродвигателя 3 постоянного тока от 0 и до 12000 об/мин. Установка работает следующим образом: на шкив 1 одевается замкнутая нить 5 и поджимается к шкиву роликами 2, вторым шкивом (на рис. 2 не показан) вручную создаем натяжение замкнутой нити и включаем электродвигатель, дождавшись стационарного движения нити, аккуратно убираем натяжной шкив. Дальше следим за контурным движением замкнутой нити. При заданных параметрах возможно или продолжение устойчивого контурного движения, или его срыв. Для изучения движения в жидкости применяется схема, показанная на рис. 1а, а под установкой ставилась ванна с жидкостью, куда погружалась нить. Опишем параметры, которые позволяет получить экспериментальная установка. Оценим величину сил сопротивления при движении нити в воздухе [1]. Модуль силы лобового сопротивленияR= С - p-d- ns/2 (a = Cp-d/2) пропорционален плотности обтекающей среды $вовдза ^Рвовдуха- 1л29кГ/Ма), квадрату скорости и (к = mtr/SfJ = 2,5 м/е) и диаметру нити d (d=5·10-3м, f = 1М, C = 1,1). Оценим значение μ = R/q и b при 1«о = S' 1О~акГ/м (нить из лавсана):μ = (1,1·1,29·2,52·5·10-3)/(5·10-3·10·2) = 0,44 < 1, b = aℓ/m0= (ℓ·C·ρ·d)/(2·m0) = (1·1,1·1,29·5·10-3)/(2·5·10-3) = 0,7, u2/qℓ = 2,52/10·1 = 0,625. Неравенство (29) не выполняется, неравенство (38) выполняется, т. е. при заданных параметрах устойчивое контурное движение нити в вертикальной плоскости невозможно, оно возможно только в горизонтальной плоскости. Этот вывод подтвержден в эксперименте. Рисунок 2 – Экспериментальная установка: 1 – шкив; 2 – поджимные ролики; 3 – электродвигатель постоянного тока; 4 – механизм для изменения начального угла наклона движения нити; 5 – замкнутая нить ВЫВОДЫ Исследовано теоретически и подтверждено экспериментально, что при контурном движении замкнутой гибкой нити в вертикальной плоскости положение шкива относительно замкнутого контура, т.е. контур нити находится над шкивом или под шкивом не влияет на устойчивость движения нити. Показано, что только одним увеличением сил сопротивления добиться устойчивого контурного движения нити невозможно. Получены математические выражения для границ областей существования устойчивых режимов движения в вертикальной и горизонтальной плоскостях. Экспериментально обнаружено дестабилизирующее воздействие вибраций на устойчивость стационарных режимов. Источником вибраций являются удары утолщенных участков нити о прижимной ролик. Утолщения вызваны неравномерностью площади поперечного сечения по длине замкнутой нити и, в особенности, в местах её соединения.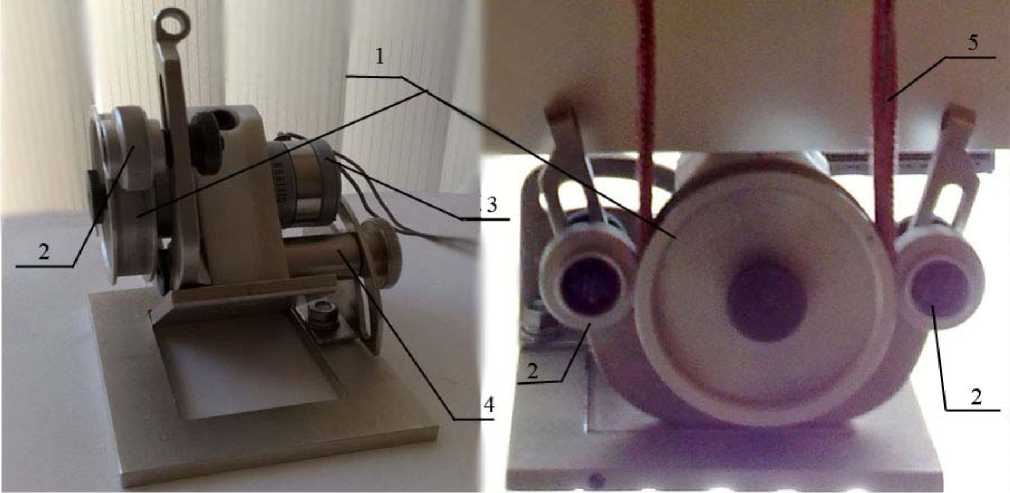
Список литературы Исследование режимов стационарного движения гибкой нерастяжимой нити на вращающемся шкиве
- Меркин, Д. Р. Введение в механику гибкой нити/Д. Р. Меркин. -Москва: Наука. Главная редакция физико-математической литературы, 1980. -240 с.
- Светлицкий, В. А. Механика гибких стержней и нитей/В. А. Светлицкий. -Москва: Машиностроение, 1978. -222 c.
- Основы механики нити/Ю. В. Якубовский [и др.]. -Москва: Легкая индустрия, 1973. -271 c.
- Сакевич, В. Н. Некоторые особенности стационарного движения замкнутой нити на вращающемся шкиве/В. Н. Сакевич, А. В. Щелкунов//Материалы докладов XLII научно-технической конференции преподавателей и студентов университета. -Витебск: УО «ВГТУ», 2009. -С.82-84.
