Исследование системы мониторинга воздушного пространства ADS-B

Автор: Акзигитов А. Р., Акзигитов Р. А., Огородникова Ю. В., Дмитриев Д. В., Андронов А. С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.21, 2020 года.
Бесплатный доступ
Одним из важнейших аспектов в области безопасности полетов является осведомленность о местоположении воздушных судов (ВС). Основным методом определения местоположения ВС в пространстве является использование радарных систем: первичных, вторичных, совмещенных первично-вторичных обзорных радиолокаторов, но у радарных систем есть существенные недостатки. Однако сейчас используются и более современные технологии, например, такие как ADS-B и мультилатерация. В данной работе акцент будет нацелен на радиовещание ADS-B. Покрытие всей поверхности Земли, низкая стоимость, обширность предоставляемой информации делает автоматическое зависимое наблюдение - вещание крайне эффективной системой. Использование такого метода определения положения ВС является актуальным и для вертолетов, в особенности, состоящих в парке специальных служб. В области аэронавигационной инфраструктуры объектами исследования являются системы наблюдения, необходимые для безопасной организации растущих объемов воздушного движения. Проблема увеличения осведомленности местоположения ВС в пространстве является всегда актуальной и имеет обширное количество исследований в этой области. На данный момент отечественные вертолеты гражданской авиация практически не оснащаются ADS-B транспондерами, а также не используют доступные ресурсы следящей системы на базе этих приемопередатчиков. Целью исследования является обоснование применимости ресурсов системы Flightradar, а также оснащение парка вертолетов ADS-B транспондерами. Применение следящей системы, такой как Flightradar, позволит значительно увеличить безопасность полетов путем улучшения осведомленности о движении вертолетов в пространстве.
Транспондер, мониторинг, вс, авиация, безопасность полетов, вертолет, воздушное пространство, контроль
Короткий адрес: https://sciup.org/148321953
IDR: 148321953 | УДК: 629.7.05 | DOI: 10.31772/2587-6066-2020-21-1-56-61
Analysis of the ADS-B airspace monitoring system
One of the most important aspects of flight safety is awareness of AC air position (AC is the short for aircraft ). The leading method of stating AC airspace location is the use of radar systems - primary, secondary, combined primary - secondary surveillance radars-though radar systems have significant drawbacks. However, at present, more advanced technologies are also in use, for example, ADS-B and multilateration. This article is focused on ADS-B broadcasting. Global coverage, low cost, great amount of obtainable information makes Automatic Dependent Surveillance - Broadcast a highly efficient system. Application of the method for AC air positioning is equally effective for helicopters, especially for those operated by special emergency services. As for the infrastructure of air navigation, the research in this sphere is focused on surveillance systems necessary for reliable control of increasing air traffic. The problem of better awareness of AC air position is still acute and has always been the object of extensive research. At present, home-manufactured civil aviation helicopters are practically never equipped with ADS-B transponders, and hardly ever use the available resources of transceiver-based surveillance systems. The objective of the analysis presented is to demonstrate the applicability of Flightradar system options, as well as implementation of ADS - B transponders for helicopter fleet. Operating surveillance systems like Flightradar may considerably increase flight safety by improving the awareness of helicopters current air position.
Текст научной статьи Исследование системы мониторинга воздушного пространства ADS-B
Введение. Одним из важнейших аспектов в области безопасности полетов является осведомленность о местоположении ВС. Основным методом определения местоположения ВС в пространстве является использование радарных систем: первичных, вторичных, совмещенных первично-вторичных обзорных радиолокаторов, но у радарных систем есть существенные недостатки [1; 2]:
-
1) не покрывают большие водные территории и районы полюсов Земли;
-
2) отсутствие встроенного механизма обнаружения ошибочных данных в сигналах
запроса или ответа;
-
3) параметры точности ограничиваются допуском на задержку в приемоответчике,
поэтому система непригодна для наблюдения на аэродроме;
-
4) высокая стоимость радаров затрудняют их распространение в труднодоступных
районах.
Однако сейчас используются также и более современные технологии, например, такие как ADS-B и мультилатерация. В данной работе акцент будет нацелен на радиовещание ADS-B. Покрытие всей поверхности Земли, низкая стоимость, обширность предоставляемой информации делает автоматическое зависимое наблюдение - вещание - крайне эффективной системой. Использование такого метода определения положения ВС является актуальным и для вертолетов, в особенности, состоящих в парке специальных служб, что позволяет эффективно отслеживать вертолеты в труднодоступных районах, а также эффективнее проводить спасательные операции [3].
При использовании для ведения наблюдения «воздух - земля» ADS-B дает значительные выгоды в плане обеспечения безопасности полетов по сравнению с процедурным УВД без радиолокационного наблюдения. Данные ADS-B могут обеспечивать применение таких автоматических инструментов безопасности, как краткосрочные сигналы о возможности возникновения конфликтной ситуации, предупреждения, касающиеся выдерживания разрешенного эшелона, предупреждения, касающиеся выдерживания маршрута, и предупреждения о вторжении в опасную зону, в целях повышения безопасности полетов и безопасности воздушного пространства. Имея средства наблюдения, авиадиспетчер значительно лучше ориентируется в обстановке [4; 5].
Математический метод. Эксплуатация системы Flightradar – это использование карты, на которой показаны самолеты, совершающие полет в текущий момент времени.
В функции ADS-B используются различные методы и частоты, в частности, расширенный сквиттер, работающий на частоте 1090 МГц, а также приемопередатчик универсального доступа (UAT) (978 МГц) и ОВЧ-линия цифровой связи (VDL) режима 4 (118–137 МГц).
Поскольку сообщения ADS-B передаются в режиме радиовещания, их можно принимать и обрабатывать с помощью любого подходящего приемника. В результате ADS-B поддерживает как наземную функцию, так и функцию ASA.
Для приема и обработки сообщений ADS-B устанавливаются наземные станции авиационного наблюдения. В случае бортовых видов применения оборудованные приемниками ADS-B воздушные суда могут обрабатывать сообщения от других воздушных судов, чтобы определить местоположение окружающих воздушных судов [6].
Данные о местоположении и скорости передаются дважды в секунду. Опознавательный индекс воздушного судна передается каждые пять секунд. Передача расширенного сквиттера (ES) функции ADS-B является неотъемлемой частью многих приемоответчиков режима S, хотя ее можно также реализовать в устройстве приемоответчика, не работающего в режиме S. Исследование будет представлять собой внедрение технических решений, позволяющих применить в полете следящую систему с последующей оценкой эффективности произведенной модернизации. Методика, по которой будет осуществляться модернизация летальных аппаратов, обоснованность решений, оценка эффективности представляет собой руководство.
Частота обновления радиолокационных данных составляет одно сообщение в течение 4 с, ADS-B – 0,5 с, а RTK – 0,2 с. Поэтому в течение одного и того же временного интервала больше сообщений будет передано в RTK, чем через радар и ADS-B, и сообщения радара являются самыми редкими [7; 8].
Нужно синхронизировать данные, чтобы получить точность радара и ADS-B и сравнить производительность радара и ADS-B, поэтому данные асинхронного мультинаблюдения должны быть экстраполированы, чтобы идти в ногу друг с другом. Прогресс синхронизации ADS-B, РЛС и РТК приведен на рис. 1.
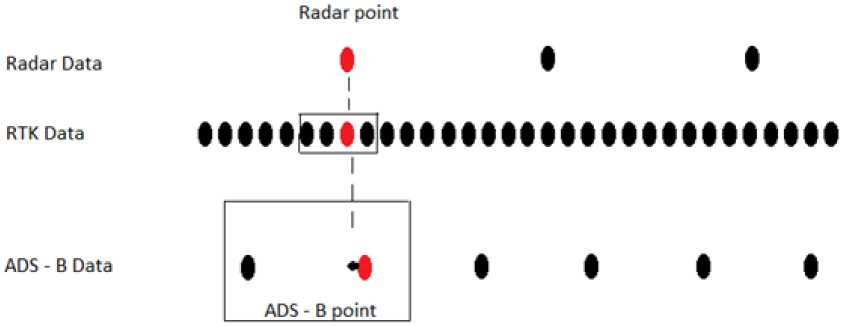
Рис. 1. Прогресс синхронизации ADS-B, РЛС и РТК
Fig. 1. ADS-B, radar data and RTK synchronization progress
Отметим, что время одинаково для данных ADS-B, радиолокационных данных и базовых данных. Тогда будем иметь дело с остальной частью ADS-B данные, радиолокационные данные и базовые данные для синхронизации данных ADS-B, радиолокационных данных и базовых данных. Затем выполним следующие шаги [9]:
-
1. Для радиолокационных данных извлечем сообщение о времени, содержащееся в радиолокационных данных, и укажем время T 1 .
-
2. Извлечем сообщение о времени, содержащееся в исходных данных, которое является ближайшим от T 1 , и назовем время T 2 .
-
3. Затем получим сообщение о местоположении (LA1, LO1), сообщение о скорости ( V 1 ) и сообщение о направлении ( H 1 ) радиолокационных данных, соответствующих T 1 . Направление определяется как угол между направлением движения самолета и истинным севером, а H 1 исходит из радиолокационных сообщений, которые выдает радиолокационная станция. Первоначально это достигается путем расчета угла между целью и направлением луча антенны.
-
4. Мы можем получить экстраполированное сообщение о положении (LA1E, LO1E) в соответствии с (LA1, LO1), V 1 и H 1 .
-
5. Извлечем сообщение о времени, содержащееся в данных ADS-B, которое является ближайшим от T 2 , и назовем время T 3 .
-
6. Затем мы получим сообщение о местоположении (LA3, LO3), сообщение о скорости ( V 3 ) и сообщение о направлении ( H 3 ) данных ADS-B, соответствующих T 3 . H 3 поступает из сообщений ADS-B, которые выводит станция ADS-B. Первоначально оно было получено из источника навигационных данных и является более точным, чем радар.
-
7. Мы можем получить экстраполированное сообщение о положении (LA3E, LO3E) в соответствии с (LA3, LO3), V 3 и H 3 .
Выражения следующие:
'LA1E = LA 1 + (T - T V cos H
^ LO1E = LO1 + ( T - T ) V sin H
Выражения следующие:
'LA 3 E = LA 3 + ( T - T ) V cos H3 \ LO 3 E = LO 3 + ( T - T ) V sin H
В радиолокационных данных сообщение о местоположении выражается в полярных координатах, а сообщение о местоположении данных ADS-B выражается в координатах WGS-84. Чтобы сравнить данные ADS-B с радиолокационными данными, необходимо преобразовать полярные координаты в координаты WGS-84 [10]. Метод преобразования заключается в следующем: во-первых, извлечь наклонный диапазон, угол отклонения и высоту из радиолокационных данных; во-вторых, вычислить относительную долготу и широту радиолокационной станции; наконец, получить долготу и широту, добавив относительную долготу и широту к долготе и широте радиолокационной станции.
Предположим, что ( φ , η ) представляет долготу и широту радиолокационной станции, широты и долготы плоскости; ( α , β ) – относительную долготу и широту радиолокационной станции; h – высоту плоскости; r – наклонный диапазон, θ – угол отклонения.
Выражение преобразования широты:
4r 2 - h 2 *cos 6 = R *( a * П— )
< 180 .(3)
latitude = a + ф
Выражение преобразования долготы:
4r2 - h2 *sin 6 = R *cos( latitude )*( в * -П-)
< 180 .(4)
longtitude = в + n
Мы находим, что ошибка между положением, полученным вышеупомянутыми выражениями, и действительным положением является большой, потому что Земля представляется как идеальная сфера без учета проблемы эксцентриситета, а Земля фактически является эллипсом. Таким образом, мы улучшаем метод [12]:
-
1) мы конвертируем земные координаты радиолокационной станции в земно-центрированные, фиксированные на Земле (ECEF) координаты;
-
2) мы извлекаем наклонный диапазон, угол отклонения и высоту из радиолокационных данных, чтобы вычислить декартовы координаты плоскости;
-
3) мы преобразовываем декартовы координаты плоскости в координаты ECEF;
-
4) мы будем преобразовывать координаты ECEF в координаты WGS-84.
Выражения, используемые для преобразования, следующие:
-
1) выражения преобразования координат Земли в координаты ECEF:
xr = ( c + H r ) cos Lr cos Xr < yr = ( c + H r )cos L r sin ^ r ^ zr = ( c (1 - e 2) + H r ) sin L r
где ( L r , λ r , Н r ) – земные координаты радара станции; ( х r , y r , z r ) – координаты ECEF; е – наклонный диапазон
c =
E q
4 1 - e 2 sin(2 L )
где E q – радиус Земли;
-
2) выражения преобразования полярных координат в декартовы:
xn = r cos n cos 6
< Уп = r cos n sin 6 , zn = r cos n где (r, θ, η) – полярные координаты плоскости; (xn, yn, zn) – декартовы координаты;
-
3) выражения преобразования декартовых координат в ECEF координаты:
[ Xrt ( k ) = Xr + RX ( k )
R =
-
- sin X r cos X r 0
-
- sin X r cos X r - sin Lr sin X r cos Lr
cos Lr cos X r cos L sin X sin Lr
xrt (k) = [xrt (k)yrt (k)zt (k)]2 _xr =[xryrzr f где Хrt (k) – координаты ECEF плоскости; Хrl (k) – декартовы координаты плоскости; Хr –ECEF координаты радиолокационной станции; Lr, λr – это долгота и широта радиолокационной станции.
-
5) выражения координат ЕЭК в Земных координатах:
-
r = 7 x 2 + y2
a = ( r 2 - A 2 e 4)/(1 - e 2)
b = ( r 2 - A 2 e 4)/(1 - e 2)
q = 1 + 13.5 z 2( a 2 - b 2)/( z 2 - b )2
-
p = V q +V q ”1
t = ( z 2 + b )( p + p-x)/12 - b /6 + z 2/12
L = arctg { [ z /2 + 4+ + ^z 2 / 4 - b /2 - 1 + az /(4 t )]/ r
X = 2arc tg [( Дx 2 + y 2 - x )/ y ]
где ( x , y , z ) – координата ECEF плоскости; (L, λ, H) земная координата плоскости; A – полуось Земли.
Оценка точности. Для оценки точности данных радара и базового положения в одно и тоже время, можем получить расстояния между синхронизированным ADS-B и данными базового положения и расстояние между синхронизированным радаром и данными базового положения. Исходя из тестов 3-х летных испытаний, мы можем получить данные, показанные на рис. 2.
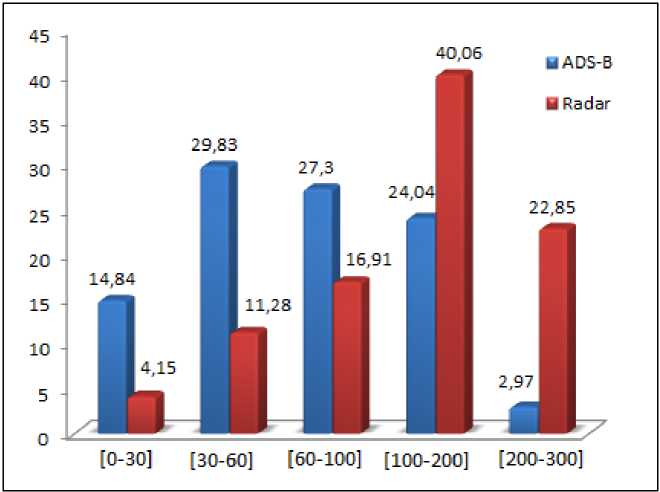
Рис. 2. Результаты оценки точности данных ADS-B в трех летных испытаниях
Fig. 2. The results of the accuracy evaluation of ADS-B in three flight tests
X-координата – пакет ошибок, а Y-координата – процент сообщения. Данные ADS-B показаны красным, а радар – синим. Очевидно, что объем сообщения ADS-B больше, чем радар в небольшом пакете ошибок, и меньше в большом пакете ошибок, поэтому можно сделать вывод о том, что точность данных ADS-B лучше, чем радарных данных [13].
В работе для наглядной демонстрации системы ADS–B были взяты изыскания китайских ученых. Наблюдения проводились на наземной станции Чэнду. Собирая отчеты ADS-B от наземной станции ADS-B Чэнду для летных испытаний, можем получить распределение NUC. Между тем, собирая отчеты ADS-B с наземной станции ADS-B Чэнду в течение примерно 40 дней, можем получить распределение NUC, как показано на рис. 3.
Оценка целостности данных ADS-B наземной станции в Чэнду показана на рис. 4. Количество отчетов, полученных от наземной станции ADS-B Чэнду, составляет 41776974. Координата X – значение NUC, а координата Y – процент сообщения. Красные столбики обозначают отчет, который не может соответствовать требованиям радиолокационной службы, а зеленые – отчет, который может соответствовать требованиям радиолокационной службы [14]. Большинство отчетов с NUC больше 4 могут удовлетворить требования радиолокационной службы, и большинство этих сообщений с NUC, равным 6 и 7, являются высокого качества.
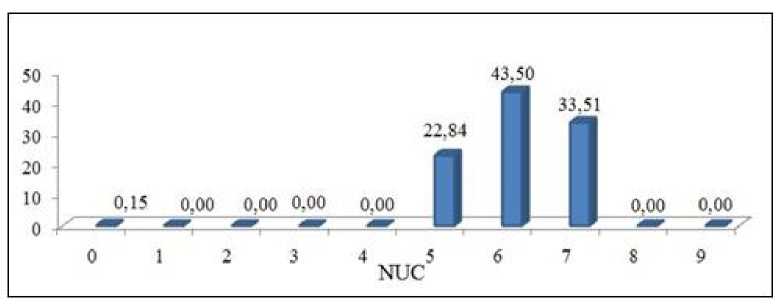
Рис. 3. Оценка целостности данных ADS-B
Fig. 3 Assessment of integrity data for ADS-B
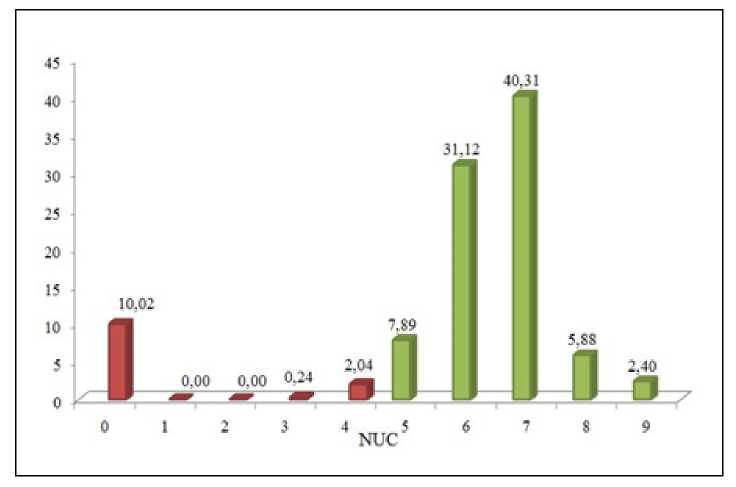
Рис. 4. Оценка целостности данных ADS-B наземной станции в Чэнду
-
Fig. 4. Data integrity assessment ADS-B ground station in Chengdu
Заключение. В России, особенно актуально, будет использование ADS – B на вертолетах службы МЧС. Это позволит улучшить эффективность спасательных операций, осведомленность о движении воздушных судов в труднодоступных районах. Например, в Канаде и США нефтяными компаниями активно используются вертолеты, оснащенные ADS-B, для полетов к нефтяным вышкам, находящимся в море, что также будет актуально и в российских условиях расположения нефтедобывающих платформ [15].
Решение, предлагаемое в данной работе, отвечает всем требованиям. Использование следящей системы Flightradar позволит увеличить безопасность полетов. По причине, что эта система использует передатчики ADS-B, расширение зоны покрытия несравнимо дешевле, чем развертывание радаров. Простота установки передатчика на вертолет позволяет произвести улучшение без существенных изменений в конструкцию. Обоснованием для применения системы слежения служит сравнительный анализ, произведенный в работе. Общая часть представлена обзором системы Flightradar и основного транспондера ADS-B, используемого этой системой, также были освещены альтернативные источники данных, которые также может обработать следящая система.
Список литературы Исследование системы мониторинга воздушного пространства ADS-B
- Lachapelle G. Navigation Accuracy for Absolute Positioning, AGARD Lecture Series 207. System Implications and Innovative Applications of Satellite Navigation. NATO, 1996, P. 4.1-4.10.
- Kartsan I. N. [Method of positioning errors elimination along with operating navigation systems]. Vestnik SibGAU. 2008, No. 3 (20), P. 101-103 (In Russ.).
- Weston J. L. Basic Principles Lf Strapdown Iner-tial Navigation Systems. Strapdown Inertial Navigation Technology. Radar, sonar, navigation and avionics. 2004. Ch. 3. P. 17-59.
- Bochkarev V. V., Kryzhanovskiy G. A., Suk-hikh N. N. Avtomatizirovannoe upravlenie dvizheniem aviatsionnogo transporta [Automated control of air traffic]. Moscow, Transport Publ., 1999, 319 p
- Tanjila F. Performance Analysis of Low Earth Orbit (LEO). Satellite Link in the presence of Elevation Angle, Fading, And Shadowing. Bangladesh, BRAC University Publ., 2009, 66 p.
- 6.Minimum operational performance standards for air traffic control radar beacon sestem/modeselect (atcrbs/mode S). Airborne equipment. 2008, Vol. 1.6, 534 p.
- Mohammad A. Ayoubi, Aircraft ADS-B Data Integrity Check. Conference paper. 2004, P. 12.
- Dunstone G. ADS-B Technology basics. Surveillance Program Lead Airservices. Australia, 2010, P. 33.
- Sukkarieh S. Low Cost, High Integrity Aided Iner-tial Navigation Systems For Autonomous Land Vehicles. Ph. D. Thesis Univ. of Sydney. 2000, 136 p.
- Jun Zh., Wei L. Study of ADS-B Data Evulation. Chinese Journal of Aeronautics. 2011, Vol. 23, P. 6.
- Jun Zh., Wei L., Yanbo Zh. Study of ADS-B data evaluation. Chinese Journal of Aeronautics. 2011, Vol. 24, Iss. 4, P. 461-466.
- Orlando V. ADS-B 1090 MOPS. Revision A. 2002, 74 p.
- Nesenyuk L. P., Fateev Yu. L., Barinov S. P. [Integrated inertial satellite system of orientation and navigation with spaced receiving antennae]. Giroskopiya i navigatsiya. 2000, No. 4 (31), P. 41-49 (In Russ.).
- Tony Delovski. ADS-B over satellite. The World's first ADS-B receiver in space. Conference paper. May 2014, P. 17.
- Demodulyator signala ADS-B [Demodulator of ADS-B signal]. Available at: https://github.com/ cheng-giant/dump1090-matlab (accessed: 10.11.2019).
