Исследование составляющих гидравлических сил, действующих на золотниковые плунжеры автономных однокаскадных электрогидравлических рулевых машин

Автор: Белоногов Олег Борисович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 2 (37), 2022 года.
Бесплатный доступ
Статья содержит результаты исследования составляющих гидравлических сил, действующих на золотниковые плунжеры автономных однокаскадных электрогидравлических рулевых машин с двух- и четырёхдроссельным электрогидравлическими усилителями с отрицательным перекрытием дроссельных окон золотниковыми плунжерами, применяемыми в космических разгонных блоках. Принятыми к исследованию в статье составляющими гидравлических сил, действующих на золотниковые плунжеры электрогидравлических усилителей рулевых машин, являются гидростатические силы и стационарные составляющие гидродинамических сил (гидродинамических сил при стационарных расходах, обтекающих золотниковые плунжеры). Исследования проводятся методами статического анализа с использованием математических моделей оптимизированных рулевых машин. В результате проведённых вычислительных экспериментов устанавливается, что причиной статической неустойчивости рулевой машины с четырёхдроссельным электрогидравлическим усилителем с отрицательным перекрытием дроссельных окон золотниковыми плунжерами является стационарная составляющая гидродинамической силы, действующая на золотниковые плунжеры электрогидравлического усилителя, а рулевая машина с двухдроссельным электрогидравлическим усилителем демонстрирует статическую устойчивость. В результате проведённых исследований выявляется, что рулевая машина с четырёхдроссельным электрогидравлическим усилителем с отрицательным перекрытием дроссельных окон золотниковыми плунжерами обладает свойством синергизма рабочего процесса, при этом рулевая машина с двухдроссельным электрогидравлическим усилителем с отрицательным перекрытием дроссельных окон золотниковыми плунжерами таким свойством не обладает.
Гидравлическая сила, статический анализ, электр о гидравлическая рулевая машина
Короткий адрес: https://sciup.org/143178834
IDR: 143178834 | УДК: 62-523.3
A study of hydraulic force components applied to spool plungers of autonomous single-stage electro-hydraulic steering actuators
The paper presents the results of a study of hydraulic force components acting on spool plungers in autonomous one-stage electro-hydraulic steering actuators with two- and four-throttle electro-hydraulic amplifiers with underlapping of throttle openings by spool plungers used in space rocket stages. The hydraulic force components acting on spool plungers in electro-hydraulic amplifiers of steering actuators that are examined in the paper are hydrostatic forces and stationary components of hydrodynamic forces (hydrodynamic forces during steady-state rates of flow around the spool plungers). The studies are conducted using the techniques of static analysis employing math models for optimized steering actuators. Computational experiments established that the cause of static instability in the steering actuator with four-throttle electro hydraulic amplifier with underlapping of throttle openings by spool plungers is the stationary component of the hydrodynamic force acting on the spool plungers of the electro-hydraulic amplifier, while the two-throttle steering actuator exhibits static stability. The study reveals that the steering actuator with four-throttle electro-hydraulic amplifier with underlapping of throttle openings by spool plungers is characterized by work process, while the steering actuator with two-throttle electro-hydraulic amplifier with underlaping of throttle openings by spool plungers does not exhibit such properties.
Текст научной статьи Исследование составляющих гидравлических сил, действующих на золотниковые плунжеры автономных однокаскадных электрогидравлических рулевых машин
В качестве исполнительных органов рулевых трактов систем управления вектором тяги (СУВТ) жидкостных ракетных двигателей космических разгонных блоков (РБ) широкое распространение получили автономные однокаскадные электрогидравлические рулевые машины (РМ) [1].
Поскольку РМ РБ чаще работают в режиме позиционирования, а не слежения, к таким РМ, как правило, не предъявляются динамические требования, а предъявляются только требования обеспечения статических характеристик, к коим относятся скоростные и силовые (или моментные) характеристики.
Автономные однокаскадные РМ могут выполняться по схемам с двух-и четырёхдроссельным электрогидрав-лическими усилителями (ЭГУ), при этом четырёхдроссельные ЭГУ могут иметь как положительное (нулевое), так и отрицательное перекрытие дроссельных окон золотниковыми плунжерами, тогда как двухдроссельные ЭГУ выполняются, как правило, с отрицательным перекрытием дроссельных окон золотниковыми плунжерами. Схемы таких рулевых машин представлены на рис. 1.
Поскольку в РМ с четырёхдроссельным ЭГУ с положительным (нулевым) перекрытием насос качает рабочую жидкость в полости нагнетания, снабжённые переливными клапанами, такие РМ в процессе работы постоянно потребляют максимальную мощность при любой нагрузке и любом командном сигнале. Поэтому указанные РМ в последнее время находят весьма ограниченное применение в рулевых трактах систем управления вектором тяги ракетных двигателей и в настоящей работе не рассматриваются.
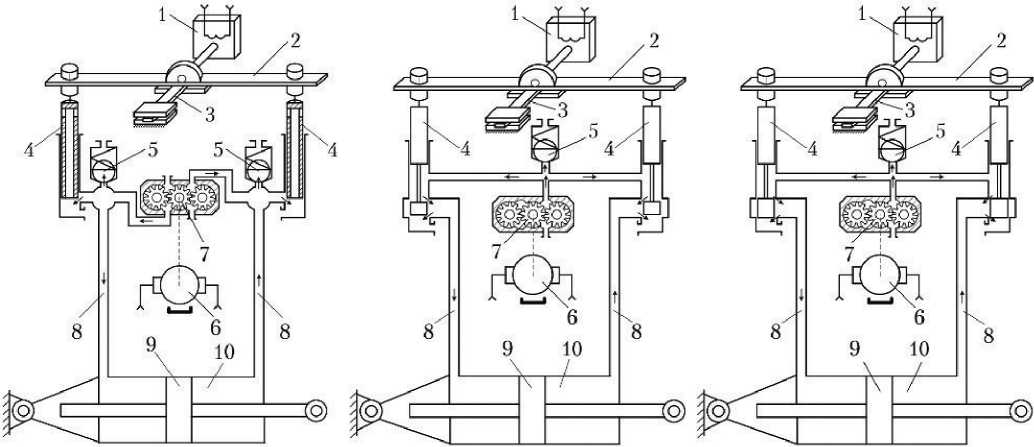
а) б) в)
Рис. 1. Электрогидравлические схемы РМ: а — с двухдроссельным ЭГУ с отрицательным перекрытием; б — с четырёхдроссельным ЭГУ с отрицательным перекрытием; в — с четырёхдроссельным ЭГУ с нулевым (положительным) перекрытием. 1 — поляризованное реле (электромеханический преобразователь); 2 — коромысло; 3 — плоская нагрузочная пружина; 4 — золотниковый плунжер; 5 — предохранительный клапан; 6 — электродвигатель; 7 — трёхшестерённый насос; 8 — трубопровод; 9 — поршень; 10 — силовой гидроцилиндр
В основу исследования составляющих гидравлических сил РМ были положены:
-
• результаты исследований гидродинамических сил, действующих на золотниковые плунжеры [2–6];
-
• итерационные методы статического анализа РМ [7, 8].
-
• результаты исследования влияния конструкционных и регулировочных параметров ЭГУ на статические характеристики РМ [9, 10];
-
• результаты оптимизации РМ по критерию электропотребления [11];
В процессе проведения статического анализа [7, 8] исследования влияния конструкционных и регулировочных параметров ЭГУ на статические характеристики [9, 10] и оптимизации РМ [11] было выявлено, что силовая характеристика РМ с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами не является однозначной. Вычислительные эксперименты показали, что при заторможенном поршне РМ при малейшем смещении коромысла ЭГУ (имитация силового воздействия) в ту или другую сторону золотниковые плунжеры сваливаются под действием гидравлической силы (суммы гидростатической силы и стационарной составляющей гидродинамической силы) на значительную величину в сторону смещения (сторону силового воздействия).
Это явление иллюстрируется рис. 2, 3. И в том, и в другом случае зависимости гидравлической силы от перемещения золотниковых плунжеров при заторможенном поршне РМ F г = f ( X з) не начинаются из начала координат, что указывает на статическую неустойчивость такого типа РМ.
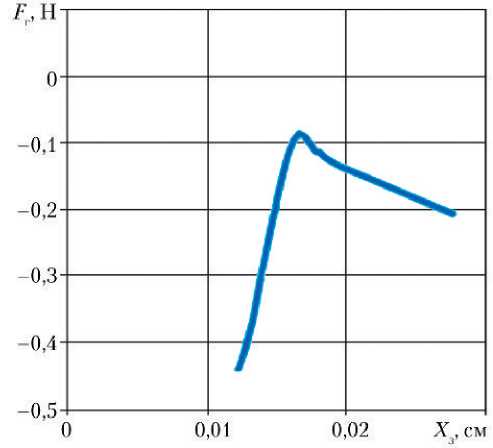
Рис. 2. Первый вариант зависимости F г = f ( X з) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
Соответствующие этим смещениям золотниковых плунжеров ( X з) силовые характеристики представлены на рис. 4.
Таким образом, в результате проведённых исследований было установлено, что нейтральное положение золотниковых плунжеров ЭГУ РМ (Xз = 0) является точкой бифуркации [12], а точки, в которые смещаются золотниковые плунжеры при незначительных внешних воздействиях, являются аттракторами [12]. При этом составляющие четырёхдроссельного ЭГУ простейшие трёхходовые золотниковые гидрораспределители с отрицательным перекрытием дроссельных окон золотником таким свойством, согласно работе [13], не обладают, и их зависимости Fг = f(Xз) начинаются из начала координат.
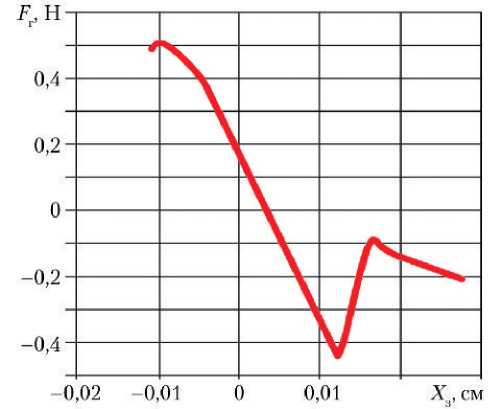
Рис. 3. Второй вариант зависимости F г = f ( X з) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
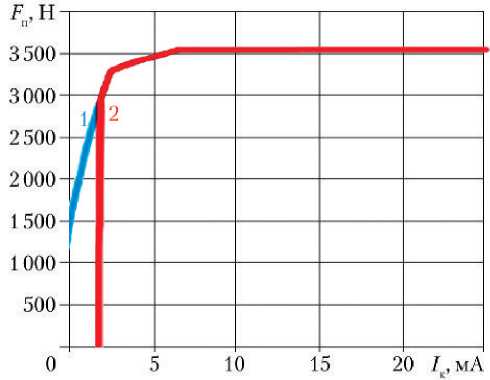
Рис. 4. Зависимости усилия на поршне F п = f ( 1 к ) РМ с четырёхдроссельным ЭГУ: 1 — первый вариант; 2 — второй вариант
Так проявляется потенцированное действие четырёхдроссельного ЭГУ или синергизм его рабочего процесса [14], т. е. результирующий эффект общего действия (совместное воздействие факторов обтекания золотниковых плунжеров потоками жидкости через дроссельные окна и вращения гильз (полых осей трёхшес-терённого насоса)) превосходит сумму эффектов отдельного действия указанных факторов [15, 16].
При этом силовая характеристика РМ с двухдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами, представленная на рис. 5, как и соответствующая ей зависимость гидравлической силы от перемещения золотниковых плунжеров F г = f ( X з) (рис. 6) в аналогичных условиях демонстрирует однозначный характер [9], т. е. существование только одного вида характеристики. Кроме этого, из графика на рис. 6 видно, что зависимость F г = f ( X з) при заторможенном поршне РМ начинается из начала координат, что указывает на статическую устойчивость такого типа РМ.
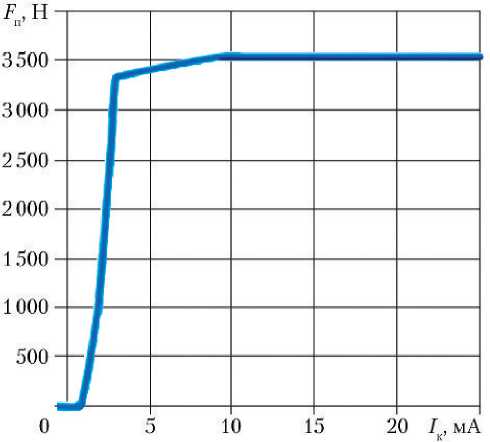
Рис. 5. Зависимость F п = f ( I к ) РМ с двухдроссельным ЭГУ
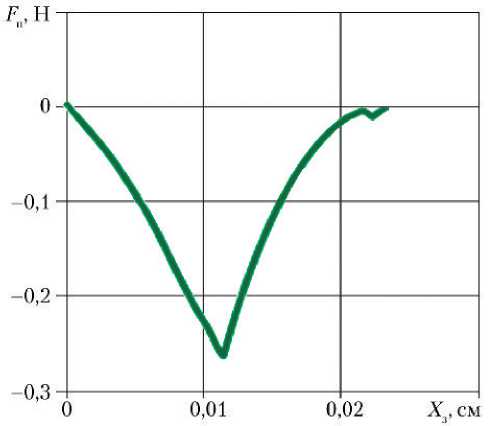
Рис. 6. Зависимость F г = f ( X з) РМ с двухдроссельным
ЭГУ при заторможенном поршне
Это даёт право утверждать, что составляющие двухдроссельного ЭГУ простейшие двухходовые золотниковые гидрораспределители оказывают аддитивное действие [17, 18], т. е. результирующий эффект общего действия (воздействия факторов обтекания золотниковых плунжеров потоками жидкости через дроссельные окна и вращения гильз (полых осей трёхшестерённого насоса)) равен сумме отдельных эффектов указанных факторов.
При статических режимах работы РМ гидравлические силы F г, действующие на золотниковые плунжеры ЭГУ обоих типов, слагаются из двух составляющих [7, 8]:
-
• гидростатической силы F гc;
-
• стационарной составляющей гидродинамической силы F гдс, т. е.
F г = F гc + F гдс .
Гидростатические силы описываются уравнениями:
-
• (1) — для двухдроссельного ЭГУ [7]
F гc = S т1( p г1 – р г2) + S т2( р з1 – р з2), (1)
где S т1, S т2 — площади внешней и внутренней торцевых поверхностей золотникового плунжера; p г1, р г2 — давления в полостях начала каналов гильз; р з1, р з2 — давления в камерах золотниковых плунжеров;
-
• (2) — для четырёхдроссельного ЭГУ [8]
F гc = S 12( pz 1 – рz 2 – pz 3 + рz 4) +
+ S 34( p г1 – р г2), (2)
где S 12, S 34 — площади наливных и сливных торцевых поверхностей пояска золотникового плунжера; pz 1, рz 2, pz 3, рz 4 — давления в началах и концах полостей между штоками золотниковых плунжеров и гильзами.
Стационарные составляющие гидродинамических сил описываются уравнениями:
-
• (3) — для двухдроссельного ЭГУ [7]
n
F гдс = [2 S 2 кг ( p г1 – р г3 )]/ ∑ ζ кг. i + λ кг1 ( l кг / d кг )
г - 1
[2 S 2 кз ( p г1 – р з1 )] /
n
∑ ζ кз. i + λ кз1( l кз / d кз)
г -1
– [2 S 2кг( p г2 – р г4)] /
n
∑ ζ кг. i + λ кг2( l кг/ d кг)
г - 1
+
[2 S 2кз( p г2 – р з2)] /
n
∑ ζ кз. i + λ кз2( l кз / d кз)
г - 1
+
+ [2 m озµ2оз1 S оз р з1cos(θ/2)] / εоз1 – [2 m озµ2оз2 S оз р з2cos(θ/2)] / εоз2 –
– [2nоµ2ос1Sос1(рр1 – рг1)cos(βос1)] / εос1 + [2nоµ2ос1Sос2(рр2 – рг2)cos(βос2)] / εос2, где βос1, βос2 — углы истечения потоков рабочей жидкости в сечениях сегментных дроссельных окон золотникового гидрораспределителя; nо — количество дроссельных окон; θ — угол истечения потоков рабочей жидкости в отверстиях золотниковых плунжеров; mоз — количество отверстий в золотниковом плунжере; Sоз — площадь проходного сечения отверстия в золотниковом плунжере; µоз1, µоз2 — коэффициенты расхода отверстий nn в золотниковом плунжере; ∑ζкг.i, ∑ζкз.i — суммы коэффициентов местных гидрав- лических сопротивлений, обусловленных изменениями параметров русла каналов гильз и каналов золотниковых плунжеров, соответственно; λкг1, λкг2, λкз1, λкз2 — коэффициенты гидравлических потерь на трение по длине каналов гильз и каналов золотниковых плунжеров, соответственно; lкг, lкз — длины каналов гильз и каналов золотниковых плунжеров, соответственно; dкг, dкз — диаметры каналов гильз и каналов золотниковых плунжеров, соответственно; Sкг, Sкз — площади проходных сечений каналов гильз и каналов золотников, соответственно;
-
• (4) — для четырёхдроссельного ЭГУ [8]
F гдс = µ2 о1 S 2 о1 ( p z 3 – p p1 ){[2 n о cos(β о1 )] /( S о1 ε о1 ) – [(2 n 2 о )/ S 12 ](ρ z 1. z 3 /ρ z 3.p1 )} –
– µ2 о3 S 2 о3 ( p p1 – p г1 ){[2 n о cos(β о3 )] /( S о3 ε о3 ) – [(2 n 2 о )/ S 34 ](ρ г1.г3 /ρ р1.г1 )} –
– µ2 о2 S 2 о2 ( p z 4 – p р2 ){[2 n о cos(β о2 )] /( S о2 ε о2 ) – [(2 n 2 о )/ S 12 ](ρ z 2. z 4 /ρ z 4.р2 )} +
+ µ2 о4 S 2 о4 ( p p2 – p г2 ){[2 n о cos(β о4 )]/( S о4 ε о4 ) – [(2 n 2 о )/ S 34 ](ρ г2.г4 /ρ р2.г1 )},
где βо1, βо2, βо3, βо4 — углы истечения потоков рабочей жидкости в сечениях дроссельных окон золотникового гидрораспределителя; S о1, S о2, S о3, S о4 — площади проходных сечений дроссельных окон; µо1, µо2, µо3, µо4 — коэффициенты расхода дроссельных окон; εо1, εо2, εо3, εо4 — коэффициенты сжатия потоков в дроссельных окнах; n о — количество дроссельных окон; ρ z 1. z 3, ρ z 2. z 4 — средние значения плотности жидкости в полостях между штоками золотниковых плунжеров и гильзами; ρ z 3.p1, ρ z 4.p2 — средние значения плотности жидкости в наливных дроссельных окнах; ρр1.г1, ρр2.г1 — средние значения плотности жидкости в сливных дроссельных окнах; ρг1.г3, ρг2.г4 — средние значения плотности жидкости в каналах гильз; p p1, p p2 — давления в рабочих полостях ЭГУ РМ.
Постановка задачи
Для изучения возможности устранения статической неустойчивости РМ с четырёхдроссельным ЭГУ необходимо выяснить её причины.
Исходя из рассмотрения схем обоих типов РМ, предположительной причиной статической неустойчивости РМ с четырёхдроссельным ЭГУ может являться гидростатическая сила, действующая на торцы поясков его золотниковых плунжеров, поскольку торцевые площади поясков золотниковых плунжеров значительно больше, чем у трубчатых золотниковых плунжеров РМ с двухдроссельным ЭГУ.
Поэтому было принято решение провести дополнительные вычислительные эксперименты и осуществить сравнительный анализ полученных результатов.
результаты вычислительных экспериментов
Исследования составляющих гидравлических сил, действующих на золотниковые плунжеры РМ с двух- и четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами, проводились методом статического анализа [7, 8], в результате которого были определены зависимости F гс = f ( X з) и F гдс = f ( X з) при заторможенном штоке РМ при расчётах силовых характеристик.
Исследования проводились с использованием математических моделей оптимизированных РМ [11].
Результаты расчётов гидростатических сил, действующих на золотниковые плунжеры РМ с двух- и четырёхдроссельным ЭГУ, в зависимости от
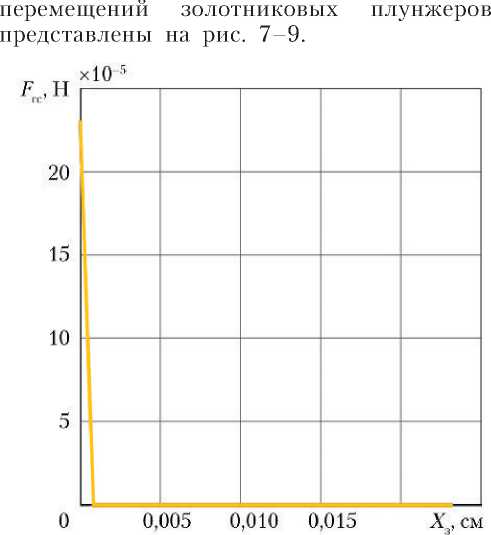
Рис. 7. Зависимость F гс = f ( X з) РМ с двухдроссельным ЭГУ при заторможенном поршне
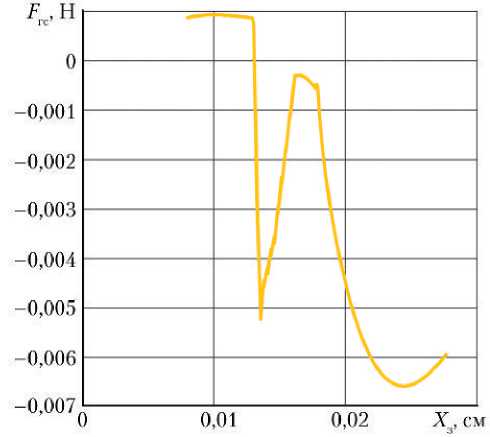
Рис. 8. Первый вариант зависимости F гс = f ( X з) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
Результаты расчётов стационарных составляющих гидродинамических сил, действующих на золотниковые плунжеры РМ с двухдроссельным ЭГУ, представлены на рис. 10.
Результаты расчётов стационарных составляющих гидродинамических сил, действующих на золотниковые плунжеры РМ с четырёхдроссельным ЭГУ, представлены на рис. 11, 12.
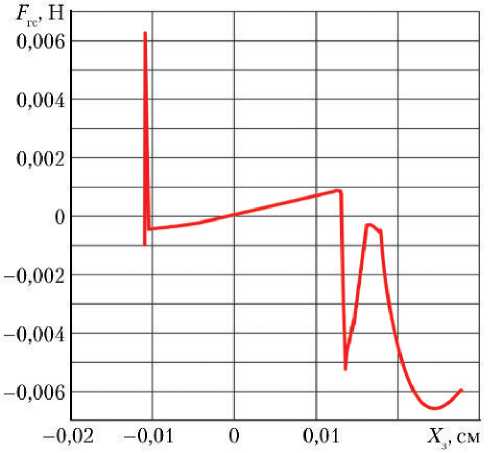
Рис. 9. Второй вариант зависимости F= f ( Х з ) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
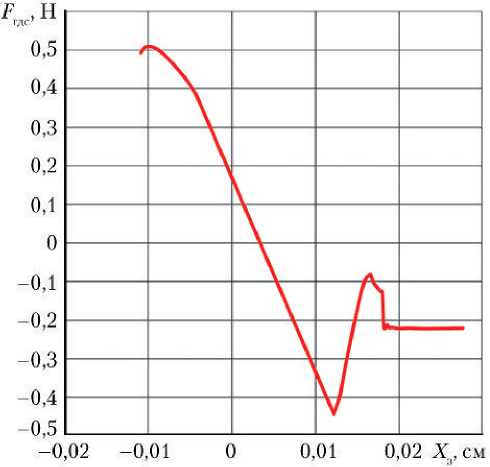
Рис. 12. Второй вариант зависимости F _дс = f ( X з) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
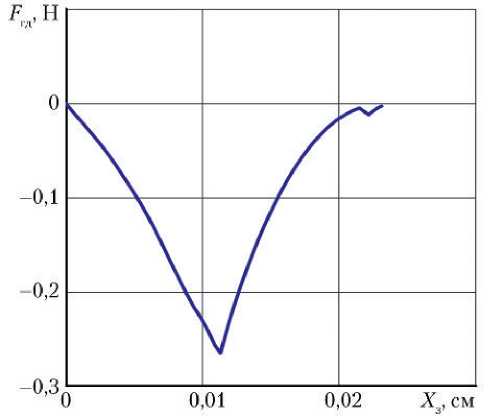
Рис. 10. Зависимость F гд = f ( X з) РМ с двухдроссельным
ЭГУ при заторможенном поршне
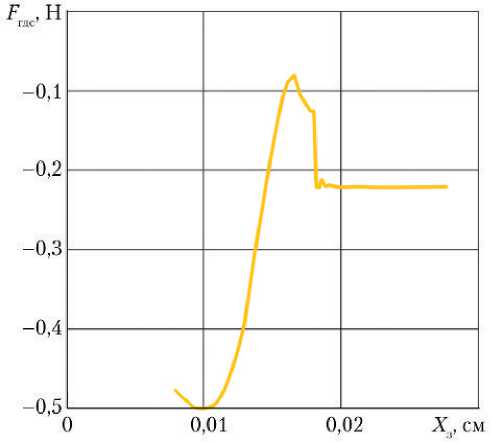
Рис. 11. Первый вариант зависимости F гдс = f ( X з) РМ с четырёхдроссельным ЭГУ при заторможенном поршне
Из рассмотрения графиков F гс = f ( X з) рис. 7–9 следует, что гидростатические силы, действующие на торцы поясков золотниковых плунжеров РМ с четырёхдроссельным ЭГУ, ожидаемо на порядок больше гидростатических сил, действующих на торцевые поверхности золотниковых плунжеров РМ с двухдроссельным ЭГУ.
Из рассмотрения графиков F гдс = f ( X з) рис. 11, 12 видно, что зависимости стационарной составляющей гидродинамической силы от перемещения золотниковых плунжеров при заторможенном поршне РМ с четырёхдроссельным ЭГУ не начинаются из начала координат и практически повторяют зависимости F г = f ( X з), представленные на рис. 2, 3, в то время как аналогичная зависимость при заторможенном поршне РМ с двухдроссельным ЭГУ (рис. 10) из начала координат начинается и практически повторяет зависимость, представленную на рис. 6.
Сравнительный анализ значений стационарных составляющих гидродинамических сил (рис. 10–12) с гидростатическими силами, представленный на рис. 7–9, показывает, что гидростатические силы пренебрежимо малы по сравнению со стационарными составляющими гидродинамических сил и поэтому не могут быть причиной статической неустойчивости РМ.
Причиной статической неустойчивости РМ с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами является стационарная составляющая гидродинамической силы.
Если бы гидростатические силы оказались причиной статической неустойчивости, то, согласно формулам (1) и (2), вариацией размеров золотниковых плунжеров и их частей можно было бы попытаться уменьшить эти силы.
Анализ формул (3) и (4), а также то, что углы истечения потоков в дроссельных окнах зависят от фактора вращения гильзы [7, 8], показывают, что найти аналитическое решение возможности уменьшения стационарной составляющей гидродинамической силы практически невозможно. Проведённые исследования влияния конструкционных и регулировочных параметров ЭГУ на статические характеристики РМ [10] показали, что повысить статическую устойчивость РМ с четырёхдроссельным ЭГУ возможно увеличением относительного коэффициента упругости плоской нагрузочной пружины узла управления ЭГУ РМ и одновременным увеличением относительной ширины дроссельных отверстий в гильзе при сохранении начальных площадей дроссельных окон. Однако лабораторная отработка РМ показала, что в этом случае для обеспечения требуемых статических характеристик РМ значительно уменьшается величина перемещения золотниковых плунжеров. И эта величина становится соизмерима с величиной колебаний золотниковых плунжеров в условиях воздействия вибраций, ударов и линейных ускорений в процессе эксплуатации, что делает РМ практически неуправляемой.
Полученный результат показывает, что стационарная составляющая гидродинамической силы, действующая на золотниковые плунжеры РМ с четырёхдроссельным ЭГУ, является дестабилизирующим фактором, который может приводить к возникновению автоколебаний в рулевых трактах системы управления вектором тяги жидкостных ракетных двигателей РБ.
Так, в рулевых трактах РБ типа Д и ДМ долгое время применялась РМ с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами, всё это время в них периодически возникали автоколебания, которые с переменным успехом пытались устранить либо перенастройкой, либо заменой РМ. Кроме этого, автоколебания выходного штока РМ иногда наблюдались и на испытательном стенде РМ даже при отсутствии замыкания РМ электрической обратной связью.
Окончательно избавить рулевые тракты РБ от автоколебаний удалось только после внедрения на РБ ДМ– SL оптимизированной РМ с двухдроссельным ЭГУ [11] с отрицательным перекрытием дроссельных окон золотниковыми плунжерами. А затем такие РМ стали применять на РБ ДМ– SL Б и на новом варианте РБ типа ДМ.
Применение разработанной высокостабильной и высокоустойчивой РМ с двухдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами в новых перспективных разработках РБ должно обеспечить устойчивость рулевых трактов систем управления вектором тяги жидкостных ракетных двигателей.
заключение
В результате проведённых исследований установлено, что причиной статической неустойчивости РМ с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами является стационарная составляющая гидродинамической силы, действующая на золотниковые плунжеры ЭГУ РМ.
Рулевая машина с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами обладает свойством синергизма рабочего процесса, при этом РМ с двухдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами таким свойством не обладает.
Для исключения возникновения автоколебаний в рулевых трактах СУВТ жидкостных ракетных двигателей космических РБ рекомендуется не применять в качестве исполнительных органов СУВТ РМ с четырёхдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами.
Разработанная высокостабильная и высокоустойчивая РМ с двухдроссельным ЭГУ с отрицательным перекрытием дроссельных окон золотниковыми плунжерами обеспечит устойчивость рулевых трактов систем управления вектором тяги жидкостных ракетных двигателей в новых перспективных разработках разгонных блоков.
Список литературы Исследование составляющих гидравлических сил, действующих на золотниковые плунжеры автономных однокаскадных электрогидравлических рулевых машин
- Kudryavtsev V.V., Stepan G.A., Shutenko V.I., Chertok B.E. The rocket steering actuators // IAC'94 International Aerospace congress. Theory, Applications, Technologies. Abstracts. August 15-19, 1994, Moscow, Russia.
- Попов Д.Н., Сосновский Н.Г., Княжанский А.А. Идентификация гидродинамических характеристик золотникового распределителя // Наука и образование: Науч. изд. МГТУ им. Н.Э. Баумана. 2015. № 05. С. 26-39.
- Солман М.И., Попов Д.Н. Компьютерное исследование и расчёт гидродинамических нагрузок на золотник // Наука и образование: Науч. изд. МГТУ им. Н.Э. Баумана. 2012. № 10. С. 79-92.
- Попов Д.Н., Сосновский Н.Г., Сиу-хин М.В. Компьютерное моделирование гидросистем с типовыми нелинейными характеристиками // Наука и образование: Науч. изд. МГТУ им. Н.Э. Баумана. 2017. № 07. С. 63-74.
- Кишкевич П.Н. Статический и динамический расчёт гидро- и пневмо-распределителей: Уч.-метод. пос. для студ. спец. 1-36 01 07 «Гидропневмо-системы мобильных и технологических машин» / П.Н. Кишкевич, М.И. Жилевич, П.Р. Бартош. Минск: БНТУ, 2012. 80 с.
- Даршт Я.А. Гидропривод и средства автоматики: Уч. пос. Ковров: ФГБОУ ВПО «КГТА им. В.А. Дегтярева», 2012. 108 с.
- Белоногов О.Б. Итерационные методы статического анализа двухдрос-сельной электрогидравлической рулевой машины ракетных блоков // Космическая техника и технологии. 2018. № 2(21). С. 93-105.
- Белоногов О.Б. Итерационные методы статического анализа четырёх-дроссельной электрогидравлической рулевой машины ракетных блоков // Космическая техника и технологии. 2019. № 2(25). C. 115-126.
- Белоногов О.Б. Исследование влияния конструкционных и регулировочных параметров двухдроссельного электрогидравлического усилителя на статические характеристики рулевой машины ракетного блока / / Известия РАН. Энергетика. 2020. № 1. С. 40-49.
- Belonogov O.B. Investigation of the influence of structural and adjusting parameters of a quadruple -orifices electro hydraulic amplifier on the static characteristics of rocket pack steering actuator // Herald of the Bauman Moscow state technical university. Series mechanical engineering. 2019. № 6. P. 32-40.
- Belonogov O.B. Scheme-parametric optimization by the criterion of electric consumption of autonomous one-rock electrohydraulic steering actuators of space rocket packs // Journal of Computer and Systems Sciences International. 2020. V. 59. № 3. P. 406-414.
- Малинецкий Г.Г., Потапов А.Б. Современные проблемы нелинейной динамики. М.: Эдиториал УРСС, 2000. 336 с.
- Taft C.K., Twill J.P. An Analysis of the Three-Way Underlepped Hydraulic Spool Servovalve // Transaction of ASME. Journal of Dynamic sistems, measurment, and control. June 1978. V. 100. P. 117-123.
- Данилов Ю.А. Лекции по нелинейной динамике. Элементарное введение: Уч. пос. Изд. 2-е, испр. М.: КомКнига, 2006. 208 с.
- Черногор А.Ф. О нелинейности в природе и науке. Харьков: ХНУ имени В.Н. Каразина, 2009. 386 с.
- Черногор А.Ф. Нелшшна радюф1зика, шдручник / 3-те вид доп. I перероб. Харшв: ХНУ 1меш В.Н. Каразша, 2016. 208 с.
- Аддитивность // Большая Российская Энциклопедия. М.: Науч. изд-во БРЭ, 2005. Т. 1. С. 221.
- Мелких А.В., Повзнер А.А. Физика нелинейных явлений: Уч. пос. Екатеринбург: ЧГТУ-УПИ, 2009. 144 с.
