Исследование статических и динамических режимов процессов массообмена

Автор: Демиденко Николай Данилович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 5 (38), 2011 года.
Бесплатный доступ
Получена математическая модель процесса массообмена в ректификационных колоннах тарельчатого ти- па. Построена система обыкновенных дифференциальных уравнений с переходом к уравнениям в частных про- изводных. Проведены исследования процессов установления в динамических режимах. Рассчитаны статисти- ческие и динамические характеристики промышленной ректификационной колонны.
Статические и динамические режимы, переходные процессы, время установления, метод суперпозиции стоячих волн, асимптотика
Короткий адрес: https://sciup.org/148176713
IDR: 148176713 | УДК: 62.52
Investigation of static and dynamic regimes of mass transfer processes
A mathematical model for mass transfer process in rectification columns of poppet type is obtained. At the result of the investigation the ordinary differential equations system is obtained with the transition to equations in partial deriva- tives. Investigations of processes of detection establishment of mass transfer processes in dynamic regimes are per- formed. Static and dynamic characteristics for industrial rectification columns are calculated.
Текст научной статьи Исследование статических и динамических режимов процессов массообмена
Для математического описания процессов массо-обмена в ректификационных колоннах широко используются системы уравнений в частных производных [1; 2]. Такое описание вполне естественно для колонн насадочного типа, но требует отдельного обоснования для тарельчатых колонн, так как в последнем случае объект по своей природе дискретен. В [2] был развит подход, основанный на детальном рассмотрении процессов для отдельной тарелки. На основе физических представлений о гидродинамике жидкости в тарелке и барботаже парового потока были получены уравнения баланса массы с учетом фазо- вого перехода компонентов [2]. В результате проведенных исследований построена система обыкновенных дифференциальных уравнений, а затем и в частных производных, с использованием формул разложения Тейлора в предположении малого различия параметров потока на соседних тарелках. Полученная система уравнений в частных производных для тарельчатых колонн имеет такой же вид, что и для насадочных, благодаря чему возможно описание колонн различного типа с помощью единого математического аппарата и сравнительно несложного пересчета параметров для колонн различных типов.
Рассмотрим систему уравнений, описывающую массообмен для бинарной смеси в ректификационной колонне тарельчатого типа [2]:
d t ( ( HS 1 + S 2 h ( H ) ) nx ) -A l ^ Qx * =
-
k, nD3/\ ----(y - kx ) + Ф1,
6 т
— (S 2 ( A l - h ) ny ) + A l — [ k т П D y 1
d tv 2V ’ d i ( 6т J
k т n D 3/ n
6 т
( kx - y ) + ф 2 ,
где x , y - массовые, а п , n - мольные концентрации компонентов в паре и жидкости соответственно; H , h ( H ) - уровень жидкости в переливном патрубке и на тарелке; Q - поток жидкой фазы; A l - расстояние между тарелками; S 1 , S 2 , k т , D - геометрические параметры тарелки; т - величина, характеризующая время образования пузырька пара в жидкости; Ф 1 , Ф 2 - функции внешнего воздействия, обусловленные вводом и выводом потоков сырья и целевых продуктов.
Большой интерес представляет исследование различных нестационарных режимов, в частности процессов установления. При малых отклонениях от равновесного состояния возможно проведение линеаризации системы и использование метода стоячих волн для исследования спектра собственных частот. Несмотря на простоту, этот метод позволяет не только получить качественное представление о характере процесса установления, но и определить важные количественные характеристики времени установления, резонансные свойства системы, а также выявить области неустойчивости в пространстве параметров системы.
Вычисление времени установления необходимо по двум причинам: во-первых, это важно для прогнозирования времени перехода с одного стационарного режима к другому при изменении скорости поступления сырья или его состава; во-вторых, это нужно для оптимального проведения расчетов в более сложных программах решения системы (1) по конечноразностной методике. В этом случае программа вычисления собственных частот и времени установления включается как блок в общую программу и позволяет выбрать оптимальный шаг интегрирования по времени, совместимый с устойчивостью и удовлетворительной аппроксимацией. Для контроля точности расчетов по конечно-разностной методике в качестве тестовых также могут быть использованы аналитические решения, представленные в виде суперпозиции стоячих волн.
Если известно N собственных значений, то можно выписать соответствующее N параметрическое семейство решений в виде uNu
I | = Е Сп I n| eXn, (2) VVJ n=1 V vn / где un, vn - собственные функции частот; Xn - комплексные числа; cn - произвольные коэффициенты.
Для применения конечно-разностной методики к решению системы (1) введем следующие обозначения: u = ( HS 1 + S 2 h ( H ) ) nx , v = ny , ky = ^T^ n . Линеаризуя (1) в окрестности стационарных параметров, получим систему без учета внешнего воздействия:
du . d u /* \
--A— = D, v - k u , dt dl’ dv Ddv/,♦
— + B— = D2 k u - v , dt dl/’
где A , B - величины, пропорциональные скоростям потоков. Граничные условия с учетом рециркуляции взаимодействующих для этой системы можно записать в виде [2]:
dudv
«1 — + Р1 — = Yi u + 81 v, dtdt l = 0,
dudv a2 , +в2 , = Y 2 u +82v, l = L, dtdt
где a i , P i , y i , 8 i ( i = 1,2 ) - коэффициенты, зависящие от параметров потоков в кубе ( l = 0) и дефлегматоре ( l = L ). Конкретный вид этих коэффициентов приведен в работе [2].
Решение задачи (3), (4) ищем в виде u = u (l) eX t, v = v (l) eX t.
Подставим эти решения в систему (3) и граничные условия (4):
u ( l ) X- Au ' ( l ) = D 1 ( v ( l ) - k * u ( l ) ) ,
v ( l ) X + Bv ' ( l ) = D 2 ( k * u ( l ) - v ( l ) ) , a 1 X u ( 0 ) + p 1 X v ( 0 ) = Y 1 u ( 0 ) + 8 1 v ( 0 ) , l = 0, a 2 X u ( 0 ) + в 2 X v ( 0 ) = y 2 u ( 0 ) + 8 2 v ( 0 ) , l = L .
Решим систему (5):
u (l ) = aeцl, v (l ) = be^.
Подставляя u ( l ) и v ( l ) в (3), получим систему на собственные значения X:
aX- Aa ц = D1 (b - k* a),
bX + ВЬц = D2 (k * a - b), из которой найдем выражения для ц1 2 (X):
-
1 [X X D 2 D . k * 1
Ц = 1±
-
1,2 2 1 A B B A J
1 [X X D 2 D , k * | X 2 X D 2 X k*D ,
.
запишем в векторном виде:
у
и I
= ах v J
—(Х —Ац + Dik )
e ц 1 + x t
у
+ a 2
— ( Х — А ц 2 + D i k )
ц 2 l +x t e .
Для определения X и, следовательно, ц ( Х ) и ц 2 ( Х ) воспользуемся граничными условиями (6). Подставляя решение (7) в граничные условия при l = 0 и l = L , получим:
Зная число корней, определим сами корни, воспользовавшись формулой [3]:
1 Г f ( (Х) Л-v N Х^мГ d X = L n k a k ,
2пf(X) и где ak - корень уравнения f (X) = 0; nk - его кратность.
Согласно этой формуле составим систему
1 г f '(X)
Х,+Х2 + ... + Х = — Х^-Н) d X,
1 2 n 2 п i C f ( X ) ’
X 2 +х 2 + +х 2 = — fx 2 Mx l d X ,
1 2 n IUC f ( X ) ’
a-ext Г Ха, — у, + (Хр, — 5])—^Х — Ац + —k j | + I
+a2ex1I Ха, — у, + (Хр, — 5,)—(X — Ац2 + —k*) I = 0, l = 0, I /Г')
a 1 e Ц I Ха 2

+ a2e Ц 2 L I Ха2 — у2 + ( ХР2 — 52)—(X — А ц2 + —k *) I = 0, l = L .
I
Итак, мы имеем систему уравнений для коэффициентов решения (7) a 1 , a 2 . Ее определитель должен быть равен нулю:
f ( Х ) = e Ц 2 L I Ха, — у, + ( ХР, — 5, )—( Х — А ц, + —k *) Iх
I х| Ха2 — у2 +(ХР2 —52)—(X — Ац2 + —1 k*) | =
I —1 )(8)
= — e Ц 1 L I Ха2 — у2 + (ХР2 — 52)—(Х — А ц + —k *) I х
I
X N +x N + ... +x N = — fx Nf (X ) d X ,
1 2 n 2niC f(X)
которая решается внутри достаточно большого контура C .
При исследовании асимптотики необходимо исходить из конкретных граничных условий. Поэтому возьмем задачу, например из работы [2], и применим к ней конечно-разностную методику.
Граничные условия из работы [2] приведем к виду dv wc
H. — = с, и--v — c2v, l = 0, k dt
Hc du Vc d 2 — = c7v — -S-u u, l = L,
Ld dt где Hk, Hd, c1, c2, Vd, Ld, W - известные коэффициенты, откуда для системы (6) получим:
а1 = 0, Р1 = cTHk-, Y1 = c1, 51 =— c21 W +1 VdV х| Ха1
— у 1 + ( Х Р 1 — 5 1 )~ ( Х — А ц 2 + — 1 k ) D
_ Hdc1 о _ n _ c1Vd т _ а2 = T , e2 = 0, Y 2 = T , 52 = c 2
Ld Ld
Вычислив корни Х этого трансцендентного уравнения, мы тем самым найдем спектр исходной задачи, который, вообще говоря, содержит бесконечное число значений Х . Поэтому процесс решения уравнения (8) разобьем на два этапа: сначала определим младшие корни Х внутри достаточно большого замкнутого контура С и получим точное численное решение уравнения (8), а затем исследуем асимптотику при X ^ го .
Для получения точного решения уравнения (8) воспользуемся методами теории функций комплексного переменного. Известно, что число нулей внутри замкнутого контура С аналитической функции f ( Х ) , не имеющей полюсов, определяется по формуле [3]:
N = ' , ' ' d х .
2«iJ f (Х)
В уравнении (8) исключим младшие члены, не содержащие X и первого порядка относительно X, и получим уравнение для достаточно больших X:
e ^( A + B > L

з в1 А а2Х — 1 +—
2 — 1 I B
.
Числитель правой части, не содержащий X , обозначим с . Тогда
e A ( A + B > L
c
а2Хвх
2 — 1

Имея в виду, что X - комплексное число, т. е.
X = ^ + i п , получим:
Х( A + B)L = ln
AB
AB
^ = 7----^ln(A + B) L
c
. P i (, A а7Х— 1 +—
2 D i к B
c
агХ-^^ (1
2 D i к
2 п nAB
n = - ------- — + const.
(A + B) L
- In Х ,
AB
——- ln П,
При исследовании полученного спектра { Х n } нужно прежде всего обратить внимание на Re Х n . Если среди комплексных чисел Х n имеются такие, для которых Re Х> 0, то коэффициенты системы таковы, что режим будет расходящимся, и поэтому следует изменить значения параметров.
В заключение рассмотрим величину т = max ।—-—, | Re Х|
–
Перенумеровав полученные Х в порядке возрастания |ReХ|, решение системы (3) запишем в виде суперпозиции стоячих волн:
( г
u
v
= Z e Х n t n
+ bn
an
к
— (Хn - AP1 + Di k ) D
А
e ^ z
время затухания самой медленной из гармоник, т. е. время установления для всей системы. От этой величины зависит выбор шага интегрирования по времени при расчетах по конечно-разностной методике. При расчетах периодических режимов следует иметь в виду, что существует возможность резонанса при совпадении частоты внешнего воздействия с одной из собственных частот (мнимой частью Х ).
Приведем результаты расчетов, полученные с помощью конечно-разностной методики для прогнозирования поведения решения задачи (3), (4) (рис. 1–4).
Были использованы следующие
— (Хn - AU, + Di k )
e 2 z
где an , bn выбираются таким образом, чтобы удовлетворить заданному начальному условию.
1 u (40, t )
0,8
0,7
0,6
0,5
0,4
0,3
0,2
A = 36 м/с,
B = 360 м/с,
коэффициенты:
D i = D 2 = k y V ,
V ■ A
V = 73,07 кмоль/ч, к =---- ,
L ■ B
H k = 30 кмоль/ч, W = 76,59 кмоль/ч.
а = 45,21 кмоль/ч,
H d = 50 кмоль/ч,
u (20, t ) 0,9
u (0, t )
3 ′
u (0, t ) 0,1
2 4 6
u (40, t )
u (20, t )
20 22 t , ч
Рис. 1. Кривые переходных процессов при возмущении по концентрации вверху колонны для точек l = 0, 20, 40 м: 1 ′, 2 ′, 3 ′ - при увеличении u ( L ,0 ) на 50 %; 1 , 2 , 3 - при уменьшении u ( L ,0 ) на 50 %
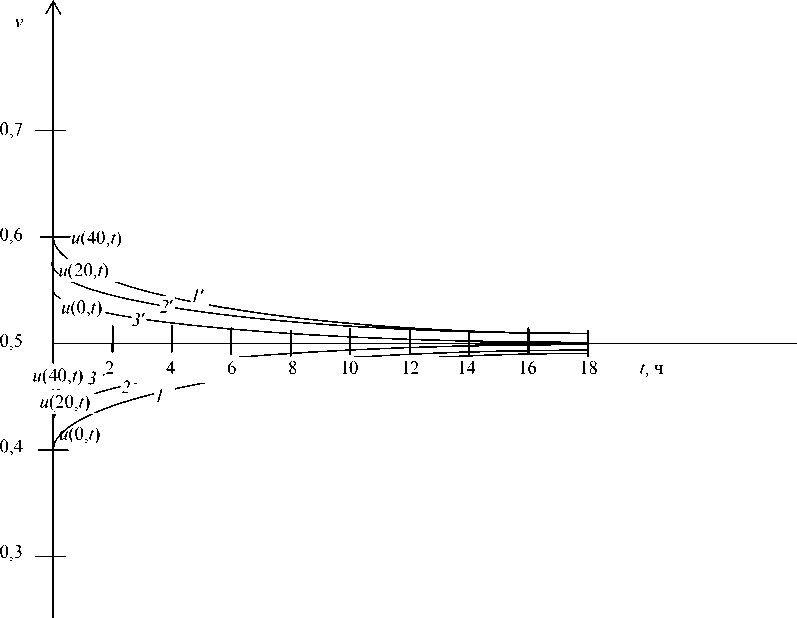
Рис. 2. Кривые переходных процессов при возмущении по концентрации вверху колонны для точек l = 0, 20, 40 м: 1 ‘, 2‘, 3 ‘ - при увеличении v ( L ,0 ) на 50 %; 1 , 2 , 3 - при уменьшении v ( L ,0 ) на 50 %
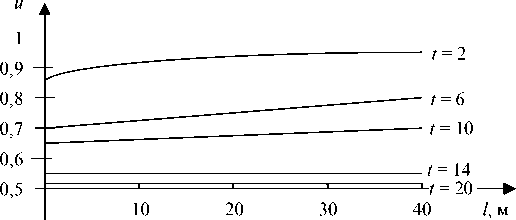
Рис. 3. Профиль концентраций в жидкости по длине колонны при возмущении на 50 % вверху колонны для различных t , ч
v
0,6
0,5
t = 2
t = 6
t = 10
t = 20
0,4

10 20 30 40 l , м
Рис. 4. Профиль концентраций в паре по длине колонны в различные моменты времени при возмущении на 50 % вверху колонны для различных t , ч
Для этих коэффициентов все Re X < 0, что обеспечивает сходимость процесса. Кроме того, можно оп ределить время установления т = max,—-—, = 6,39 ч,
| Re X за которое амплитуда самой медленной гармоники уменьшается в с раз.
В сложных химико-технологических установках, состоящих из ряда соединенных аппаратов и имеющих систему потоков взаимодействия их сред, параметры которых чувствительны к возмущениям, все более важным становится построение высокоэффективных систем контроля и управления. Однако прежде чем создавать такие системы управления, полагая основным ее звеном управляемый объект, необходимо улучшить статические и динамические характеристики этого объекта.
В данной статье предложен подход к решению задачи моделирования нестационарных режимов объектов с рециркуляцией взаимодействующих потоков
(ректификационных установок), основанный на математическом аппарате, содержащем дифференциальные уравнения в частных производных. Для исследования процессов установления применялся метод стоящих волн, который позволяет получить сведения не только о качестве и характере процессов установления, но и определить важные характеристики времени установления, резонансные свойства системы и выявить области неустойчивости в пространстве параметров системы.
