Исследование структуры деятельности судового специалиста в эргатической системе при контроле и управлении процессом автоматического регулирования параметров состояния безопасного плавания

Автор: Холичев Сергей Николаевич, Меньшиков Вячеслав Иванович, Пеньковская Ксения Вячеславовна
Журнал: Вестник Мурманского государственного технического университета @vestnik-mstu
Рубрика: Транспорт
Статья в выпуске: 4 т.19, 2016 года.
Бесплатный доступ
Впервые в теории эргатических систем проведено исследование общих особенностей структур и динамики контура настройки технического объекта, который осуществляет автоматическое регулирование параметров безопасного плавания. Выполнено исследование структуры и процесса функционирования эргатической системы, включающей систему автоматического регулирования с параметром состояния безопасного плавания. Приведена функция выбора сигналов, осуществляющих оптимальную перенастройку закона регулирования упомянутой системы, и составлена последовательность действий судового специалиста, позволяющая удовлетворительно решить задачу по обеспечению безопасности плавания. Перенастраиваемая судовым специалистом эргатическая система имеет двухуровневую иерархическую структуру. Первый - уровень автоматического регулирования параметра безопасного плавания, второй - уровень перенастройки, на котором судовой специалист осуществляет изменения параметров закона регулирования. Двухуровневое иерархическое представление эргатической системы управления параметрами безопасности плавания позволяет ввести понятие перенастройки уровня регулирования как деятельности судового специалиста, состоящей в уменьшении условий неопределенности при функционировании этого слоя. Такое уменьшение может быть достигнуто в результате воздействия верхнего уровня, который связан с представлениями судового специалиста о качестве регулирования параметров безопасности плавания судна, на нижний уровень -непосредственного автоматического регулирования параметра безопасного плавания. В результате исследования структуры деятельности судового специалиста в эргатической системе при контроле и управлении процессом автоматического регулирования параметров состояния безопасного плавания было выявлено, что основной задачей судового специалиста при функционировании в рамках эргатической системы, обеспечивающей безопасность плавания, является наблюдение за входом и выходом системы автоматического регулирования, принятие решений по выбору сигналов перенастройки законов регулирования на основе информации об отклонениях и реализация этих решений.
Эргатическая система, система автоматического регулирования, судовой специалист, закон регулирования, безопасность плавания
Короткий адрес: https://sciup.org/14294955
IDR: 14294955 | УДК: 656.61.08:681.51:[007.51:612.821] | DOI: 10.21443/1560-9278-2016-4-798-805
Study of structure of marine specialist activity in an ergative system on monitoring and managing automatic control parameters of safe navigation process
The study of structures' common features and dynamics of the technical object tuning circuit performing automatic adjustment of safe navigation options has been conducted for the first time in the theory of ergative systems. The research of the structure and process of ergative system functioning including an automatic control system with the option of safe navigation conditions has been fulfilled. The function of signals' selection performing optimal control law reconfiguration of the mentioned system has been given, and some sequence of marine specialist activities allowing solve the problem of navigation safety has been composed. The ergative system retargeted by the ship specialist has a two-tier hierarchy. The first level is an automatic control of the safe navigation parameter, and the second is the level of reconfiguration where the ship specialist changes the parameters of regulation act. The two-level hierarchical representation of the ergative navigation security settings management system makes it possible to introduce the concept of reconfiguration of regulation level as ship specialist activity which is to reduce the uncertainty in the environment in the operation of this layer. Such a reduction can be achieved as a result of exposure to the upper level associated with ideas of the ship specialist on the regulation of safe navigation parameters of the vessel on the lower level - the level of direct control automatic safe navigation option. As a result of studying the activities of the ship specialist in the ergative system on monitoring and managing automatic control parameters of safe navigation process it has been found that the main task of the ship specialist in the operation within the ergative system ensuring the navigation safety is to monitor the input and output of the automatic control system, decisions on the choice of reconfiguration laws regulating signal on the basis of information about deviations and the implementation of these decisions.
Текст научной статьи Исследование структуры деятельности судового специалиста в эргатической системе при контроле и управлении процессом автоматического регулирования параметров состояния безопасного плавания
В опубликованных до настоящего времени работах в теории эргатических систем [1–5] не проводились исследования общих особенностей структур и динамики контура настройки технического объекта, осуществляющего автоматическое регулирование параметров безопасного плавания. Однако такое исследование позволило бы с общей точки зрения классифицировать структуры эргатической системы и составить представление о стереотипах поведения судового специалиста при перенастройке режима функционирования в различных условиях информированности [6].
Материалы и методы
Перенастраиваемая судовым специалистом эргатическая система имеет двухуровневую иерархическую структуру, в которой можно выделять уровень автоматического регулирования параметра безопасного плавания и уровень перенастройки, в котором судовой специалист осуществляет изменения параметров закона регулирования (рис.). Представление эргатической системы управления параметрами безопасности плавания в виде двухуровневой иерархической позволяет ввести понятие перенастройки уровня регулирования как деятельности судового специалиста, которая состоит в уменьшении условий неопределенности при функционировании этого слоя [7; 8]. Такое уменьшение будет достигаться в результате воздействия верхнего уровня, связанного с представлениями судового специалиста о качестве регулирования параметров безопасности плавания судна, на нижний уровень непосредственного автоматического регулирования параметра безопасного плавания. На рисунке приняты следующие обозначения: УР – устройство автоматического регулирования; ОУ – объект регулирования; g – входное воздействие; x – выход; u – управление; k – сигнал перенастройки параметров закона регулирования в УР.
В данном случае НЭС функционирует в условиях неопределенности двух типов. Во-первых, в условиях неопределенности обстановки, в которой нужно выбирать решение; во-вторых, в условиях неопределенности требований, которые должны учитываться выбираемым судовым специалистом решением. Первый тип неопределенности определяется изменением параметров объекта под воздействием внешней среды и внешними возмущениями. Второй тип выражается в неопределенности выбора целевой функции, хотя эта неопределенность может быть иногда полезна, если допускает замену выбранной целевой функции на более выгодную, в данном случае целевую функцию. Относительно уровней описания системы отметим, что стратификация системы будет представлена двумя стратами, а именно стратой описания контуров, основного и перестающего, а также стратой, описывающей функциональные элементы в этих контурах.
Результаты и обсуждение
Общая постановка задачи и перестройка судовым специалистом параметров закона управления в УР
Пусть в рамках выделенных страт определен объект Р, действующий во внешней среде с параметрами, определенными на множестве А, и описываемый отображением вида
Р: U × A → X, (1)
где X – множество выходов объекта; А – множество изменяющихся параметров объекта, а ∈ A; U – множество допустимых управлений, u ∈ U.
Кроме того, пусть задана целевая функция системы, которая определяется выходной функцией объекта Р и глобальной функцией качества
z: U × A × X → V,
z(u, a) = Z(u, Р(u, а)), (2)
а также функция допустимых требований τ, переводящая множество А в множество V, т. е.
τ : A → V.
Следовательно, в рамках заданной эргатической системы (рис.) необходимо решить задачу по регулированию состояния объекта Р, которая должна быть сведена к определению управления u ∈ U для всех а ∈ А так, чтобы выполнялось условие z (u , а) < т(а), (3)
при этом полученное решение u * будет удовлетворительным, если соответствующие ему значения глобальной функции качества не превосходят определенного уровня т (а) при условии, заданном так, Va е А.
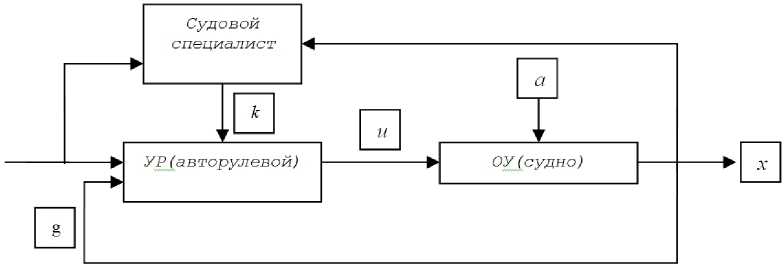
Рис. Схема изменения параметров закона регулирования Fig. Control law parameters change scheme
Однако непосредственное нахождение решения из условия (3) для двухуровневой эргатической системы представляет значительную трудность, так как структура уровня, на котором осуществляется выбор сигнала перенастройки закона регулирования, определяется уровнем регулирования, а структура уровня регулирования должна заранее учитывать структуру уровня выбора сигнала перенастройки УР. Кроме того, так как функция z не зависит явно от сигналов перенастройки, направляемых в закон регулирования УР, т. е. от выходных переменных уровня перенастройки, то определение структуры этого уровня не может быть проведено непосредственно на основе условия (3) и очевидно, что необходима декомпозиция задачи.
При декомпозиции задачи следует, используя иерархическое представление эргатической системы, найти такое разбиение, в котором можно было бы выделить согласованные более простые подзадачи, решение которых в свою очередь позволяет удовлетворить условие (3). Конечно, не всякая задача (3) может быть решена в данном случае, поэтому необходимо также найти и ограничения, которые следует накладывать на глобальную функцию качества, заданную в виде (2).
Для оценивания возможностей перенастройки параметров закона управления в УР судовым специалистом представим множество А как прямую сумму
А = А 0 ⊕ ∆ А. (4)
В качестве множества А 0 можно рассматривать любой набор чисел, соответствующих а е А, в частности значения а ∈ А в фиксированный момент времени t . Отметим, что часто целесообразным является выделение некоторого подмножества А * ⊂ А , позволяющего упростить решение задачи синтеза и задачу реализации найденных управлений, из которого уже затем можно выбрать элементы А 0 .
Если далее считать, что объект действует во внешней среде А 0 , то неопределенность обстановки в этом случае отсутствует, а задачу нахождения управления можно свести к оптимизационной задаче, которая будет определяться парой (z, и 0 ), где целевая функция зависит от выходной функции объекта
Р: Ux A 0 ^ X (5)
и функции качества
z: U 0 x A 0 x X ^ V.
Решением подобной задачи будет такое управление и 0 е U 0 , которое обеспечивает выполнение условия, записанного так:
z( и * ) = min z(u 0 ). (6)
Если вновь вернуться к объекту регулирования (1), то можно утверждать: если при и * = и * выполняется условие (3), то управление и * будет удовлетворительным для объекта (1) и следовательно, судовой специалист должен не вмешиваться в процесс функционирования эргатической системы, а осуществлять свои прямые обязанности, связанные с наблюдением за идущим процессом безопасного плавания.
Если условие (3) при и * = и * не выполняется, то возникает необходимость в улучшении найденного управления. Для этого необходимо установить предпочтительность по отношению к глобальной функции качества (2) различных управлений u ∈ U. Предпочтительность находится в прямой зависимости от значений z на множестве А. Строго говоря, z индуцирует в U упорядочение, выраженное отношением предпочтения (>), причем такое, что ∀ u и u' ∈ U, отвечают условию предпочтения u > u' тогда и только тогда, когда выполняется неравенство вида
z(u, a) < z(u', а).
В том случае, когда и > u', предпочтительнее будет управление и'. Тогда для улучшения управления и * необходимо ввести дополнительное управление ∆u, причем так, чтобы u являлось прямой суммой
U = U 0 Ф A U, (7)
-
т. е. и = и 0 + Au.
Для определения ∆u будем использовать следующее соображение. Уровень перенастройки эргатической системы, в лице судового специалиста (рис.), воздействует на уровень регулирования этой же системы с помощью сигналов k ∈ К , которые подаются для изменения параметров закона регулирования. При этом "управляющую систему", образующую уровень перенастройки, можно считать, так как его выходные сигналы k ∈ К по сути определяют процесс перенастройки закона регулирования. Для того чтобы судовой специалист был способен обеспечить нужную перенастройку, необходимо чтобы на уровне регулирования в эргатической системе существовали подмножества допустимых управлений ∆ U k , обладающих следующим свойством. Для всех ∆u ∈ ∆U k должны существовать упорядоченные пары <а, k> , определяющие отношение ρ, т. е. <а, к> е р , такие, что для каждого А а е А можно найти такое к е К , что управление и * + Au является допустимым управлением u * с точки зрения глобальной функции качества z. Это условие можно считать необходимым для осуществления перенастройки закона регулирования в эргатической системе, которую должен выполнять судовой специалист по наблюдаемым входным и выходным величинам. Если после использования допустимого управления эргатическая система вышла на режим оптимального регулирования, то судовой специалист вновь возвращается к своим прямым обязанностям – наблюдению за идущим процессом регулирования.
Выбор сигнала для настройки и реализация глобальной задачи в эргатической системе
Выбор сигналов k ∈ К судовым специалистом может осуществляться с привлечением двух стереотипов своего поведения. Первый заключается в том, что судовой специалист должен априорно оценить параметры а ∈ А, а затем использовать их при выборе допустимых управлений, таким образом устраняя существующую неопределенность. При этом дополнительное управление ∆u и соответствующий ему сигнал k ∈ К для каждого ∆а ∈ ∆А можно найти как решение оптимизационной задачи. Стереотип поведения судового специалиста должен в этом случае физически соответствовать отображению А в К.
Второй стереотип поведения судового специалиста связан с тем, что на уровне настройки УР этот специалист выбирает сигнал k ∈ К только на основе текущей информации, не идентифицируя складывающуюся обстановку. При этом судовой специалист минимизирует свою функцию качества z 0 , выбирая сигнал перенастройки k ∈ К.
Тогда каждое управление ∆u ∈ ∆U k через функцию качества z 0 индуцирует на множество К отношение предпочтительности, которое аналогично предыдущему вводится следующим образом: для каждого ∆u ∈ ∆U h имеется отношение (>) ∆ u на К такое, что для k и k' ∈ К существует отношение предпочтения вида
(k > k') ∆ u , (8)
если выполняется неравенство вида z0(k, ∆a) < z0(k', ∆а).
Здесь следует отметить, что в отличие от ранее введенного отношения предпочтительности отношение (8) можно называть ∆u-предпочтительностью.
Введенное отношение (8) позволяет сформулировать достаточное условие для описания стереотипа поведения судового специалиста при настройке контура регулирования эргатической системы. При формировании стереотипа поведения необходимо, чтобы для каждого ∆u ∈ ∆U h судовой специалист выбирал такой сигнал k ∈ К, который улучшал бы значение функции качества настройки z 0 при улучшении значения глобальной функции качества z. С формальной точки зрения стереотип поведения судового специалиста при настройке УР эргатической системы по данным текущей информации может быть представлен следующим образом:
-
(k > k') ∆ u ∈ (∆u(k) > ∆u(k')). (9)
Если расшифровать физический смысл выражения (9), то в рамках ∆u-предпочтительности стереотип поведения судового специалиста можно представить как поведение, направленное на улучшение регулирования в эргатической системе, когда для некоторого ∆u ∈ ∆U k и начального значения k' необходимо найти такие сигналы настройки, при которых удовлетворялось бы условие (8). Следовательно, стереотип поведения судового специалиста будет определяться парой значений (∆u, k'), и если выполняется условие реализации настройки, будет существовать и ее решение.
Выполнение достаточного условия настройки зависит от выбора функции качества и заданного множества допустимых управлений. Если функция качества z 0 совпадает с глобальной функцией качества z, то могут возникать ситуации, когда предпочтительное управление не принадлежит множеству допустимых управлений [9].
Для того чтобы в эргатической системе (рис.) решалась глобальная задача по обеспечению безопасности плавания, необходимо чтобы функции качества, как глобальная, так и настройки, были согласованы. Иными словами управляющее воздействие u = u 0 + ∆u, где ∆u ∈ ∆U k при удовлетворительном настроечном сигнале k по отношению к функции качества z 0 должно быть приемлемым с точки зрения глобальной функции качества z. Условия согласования лежат в основе структурного синтеза рассматриваемой эргатической системы. Эти условия требуют кроме выполнения необходимых и достаточных условий настройки еще удовлетворения ряду дополнительных условий. Формализация таких условий согласования для рассматриваемой эргатической системы представляет значительные трудности. Поэтому для выделения дополнительных условий проведем декомпозицию глобальной задачи, исходя из принципа, обеспечивающего безопасность плавания судна, которая может быть реализована только в согласованной эргатической системе. Именно в процессе декомпозиции можно выявить условия такого согласования.
Структура деятельности судового специалиста в эргатической системе
Принцип работы рассматриваемой эргатической системы должен состоять в уменьшении величины рассогласования ε ∈ Е между выходом объекта Р и модельным представлением о безопасности плавания судна в данном навигационном районе, заданным в виде субъективного отображения вида
М: G → X, (10)
где G – множество входных воздействий.
Тогда функционирование эргатической системы по обеспечению безопасности плавания можно считать удовлетворительным, если выполняется условие
|| ε || < τ ε (а).
Функция τε(а) является отображением функции допустимых требований τ(а) на множество Ε, и эту функцию можно назвать функцией допустимых рассогласований.
Представим рассогласование ε в виде
ε = ε u + ε k , где ε u – рассогласование, связанное с выбором и реализацией дополнительного управления ∆u; ε k – рассогласование, обусловленное процессами выбора сигнала перенастройки.
При организации выбора дополнительного управления ∆u допустим, что субъективное отображение (10) тождественно равно совместному отображению объекта (5) с управлением и = и * , а судовой специалист идеально осуществляет функции перенастройки контура регулирования в эргатической системе, т. е. обеспечивается равенство ε k = 0. Тогда будем искать управление ∆u ε из условия, что рассогласование ε ≡ 0. При таком подходе найденная структура будет обеспечивать совпадение выходов объекта P и субъективного представления судового специалиста о состоянии безопасности плавания M, которое используется для формирования рассогласования ε. Одновременно при нахождении ∆uε определяется отношение ρ ∈ (a, k), которое позволяет найти сигналы перенастройки закона регулирования k * , обеспечивающие выполнение условия ε ≡ 0.
Однако неизвестно, будет ли управление и, найденное как сумма управлений и * и Аи е , допустимым управлением, поскольку допустимость существенно зависит от вида глобальной функции качества z. Однако, если принять, что глобальная функция z определена только через выходы объекта Р, которые используются для формирования рассогласования е, то управление, найденное как и = м * + Аи е , будет всегда допустимым [10].
Действительно, по определению предельного управления оно будет обеспечивать совпадение выходов объекта регулирования и выхода модели субъективного представления о безопасности плавания только при условии z ( м* + Аие) = z( и*).
Введение в процесс функционирования эргатической системы управления ∆ u ε позволяет выбрать из множества дополнительных управлений ∆ U k один элемент ∆ u ε ∈ ∆ U k , при этом задача определения удовлетворительного управления переходит в оптимизационную задачу
z(u * ) = min z( и * + Аи е ). (11)
Условие (11) можно трактовать как необходимое условие перенастройки закона регулирования в эргатической системе, обеспечивающей безопасность плавания.
Рассмотрим теперь условия, которым должен руководствоваться судовой специалист, формируя свою функцию качества z0. Так как управление ∆uε ∈ ∆Uk определено, то естественно, что судовой специалист будет выбирать z0, такой, чтобы минимум достигался при предельных сигналах перенастройки k*. Если z0 определяется на числовом множестве R, то min z0(k)= z0(k*).(12)
Поскольку процедура упорядочивания пар a и k при k* обладает нулевой суммой, то z0 должна удовлетворять условию z0(k*) ≡ 0.(13)
Кроме того, функция качества z 0 должна удовлетворять необходимому условию перенастройки. Из условия (12) следует, что
[(и = и* + Аие) > u'] ^ k > k',(14)
где ">" – символ отношения предпочтительности, а k ' – любой произвольный сигнал перенастройки, отличный от величины k * .
При произвольных сигналах k ' и k '' для удовлетворения необходимого условия перенастройки функция качества z 0 должна обеспечивать строгую монотонность сигналов перенастройки закона регулирования, т. е. минимум (13) должен быть единственным.
Приведенные условия (13), (14) определяют класс функций, из которых может быть выбрана величина z 0 . Значения весовых коэффициентов в функции качества z 0 связаны с конкретной задачей. В частности, z 0 должна быть такой, чтобы при сигнале перенастройки k 0 , который должен быть выбран судовым специалистом, обеспечивалось требуемое значение рассогласования ε k , т. е.
|| ε k || < τ ε k (a), (15)
где τ ε k – функция допустимых требований на качество процесса перенастройки закона регулирования в эргатической системе (рис.). Условие (15) указывает на то, что задача нахождения сигнала перенастройки k является задачей удовлетворительного решения.
Определим задачу удовлетворительного решения с помощи четверки (z 0 , т 0 , Ak, A), где Ak е AK — отклонения сигнала перенастройки закона регулирования, т. е. Ak = k — k; z 0 является функцией качества судового специалиста, определяемой им через выходные сигналы в виде рассогласования е е Е, z 0 : Ak х E xA ^ V 0 ; т 0 — функция допустимых требований, переводящая A в V 0 и являющаяся отображением условия (15) на V 0 . Функция качества z 0 , которая задается через рассогласование е и отклонение Ak, позволяет удовлетворить условию (13). Тогда решением такой задачи будет такой сигнал перенастройки Ak 0 , что для всех а е А
Z 0 (Ak 0 , а) < Т 0 (а).
Найденное таким образом управление k 0 = k * + Ak 0 будет определять производственное поведение судового специалиста на страте описания контуров эргатической системы. Такое поведение можно описать в виде последовательности действий, включающей решение и реализацию этого решения.
В рамках введенных обозначений процесс принятия решения судовым специалистом W можно представить отображением
Ψ: Ε ×X → W , а процесс реализации этого решения отображением вида
-
S: W → K.
Заключение
В результате проведенного исследования структуры деятельности судового специалиста в эргатической системе при контроле и управлении процессом автоматического регулирования параметров состояния безопасного плавания нами выявлено, что основной задачей судового специалиста при функционировании в рамках эргатической системы, обеспечивающей безопасность плавания, является наблюдение за входом и выходом системы автоматического регулирования, принятие решений w ∈ W, по выбору сигналов перенастройки законов регулирования на основе информации об отклонениях вида ∆а ∈ ∆ А, и реализация этих решений.
Список литературы Исследование структуры деятельности судового специалиста в эргатической системе при контроле и управлении процессом автоматического регулирования параметров состояния безопасного плавания
- Никитцев К. В., Хроненко А. С., Меньшиков В. И. Задачи по обеспечению безопасности навигации, решаемые в структуре проблемных промысловых ситуаций//Рыбное хозяйство. 2013. № 3. С. 86-87.
- Меньшиков В. И., Кулезнев И. А., Блажеев А. Ю. Побуждение к реализации принципа "что вижу, то докладываю" у "человеческих элементов" в судовой системе управления//Научные проблемы транспорта Сибири и Дальнего Востока. 2013. № 2. С. 132-134.
- Оценка эффективности процедур по защите безопасности судна/В. И. Меньшиков, В. В. Ковальчук, А. Н. Папуша, И. А. Кулезнев//Вестник МГТУ. Т. 16, № 3. С. 610-612.
- Житняк М. С., Кулезнев И. А., Меньшиков В. И. Надежность наблюдения за окружающим навигационным пространством при ошибках "человеческого элемента"//Вестник МГТУ. Т. 16, № 4. С. 704-707.
- Зива И. И., Сологубов В. В., Меньшиков В. И. Надежность самоконтроля при управлении объектом в эргатической системе с временной избыточностью//Молодой ученый. 2014. № 2. С. 137-140.
- Цыпкин Я. З. Адаптация, обучение и самообучение в автоматических системах/Автоматика и телемеханика. 1966. № 1. С. 23-61.
- Принцип построения и проектирования самонастраивающихся систем управления/Б. П. Петров, В. Ю. Рутковский, И. Н. Крутова, С. Д. Земляков. М.: Машиностроение, 1972. 259 с.
- Месарович М., Мако Д., Такахара И. Теория иерархических многоуровневых систем. М.: Мир, 1973. 344 с.
- Фельдбаум А. А. Основы теории оптимальных автоматических систем. М.: Физматгиз, 1966. 624 с.
- Оптимизация выбора результата при разрешении проблемной промыслово-навигационной ситуации/В. И. Меньшиков, К. В. Никитцев, И. Н. Левоев, В. В. Сологубов//Вестник МГТУ. 2013. Т. 16, № 4. С. 761-763.
