Исследование свободных колебаний микромеханического гироскопа с учетом неортогональности осей торсионов

Автор: Сайпулаев М.Р., Меркурьев И.В., Соловьв А.В., Тарасов А.Н.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Механика
Статья в выпуске: 3 т.21, 2021 года.
Бесплатный доступ
Введение. Исследован процесс свободных колебаний чувствительного элемента микромеханического гироскопа R-R-типа рамочной конструкции разработки Научно-исследовательского института прикладной механики им. академика В. И. Кузнецова с учетом неортогональности осей торсионов. Изучено влияние инструментальной погрешности изготовления на точность гироскопа на подвижном основании в случае свободных колебаний. Целью работы являлось повышение точности прибора посредством разработки математической модели микромеханического гироскопа R-R-типа с учетом неортогональности осей торсионов и исследования влияния указанной погрешности на точность прибора. Актуальность задачи повышения точности микромеханических гироскопов связана с повышением точности инерциальных навигационных систем, основанных на микромеханических датчиках.Материалы и методы. Предложены новая математическая модель, описывающая динамику гироскопа с учетом инструментальной погрешности изготовления прибора, и формула для оценки погрешности гироскопа. Приведены зависимости переменных состояния, полученные по результатам моделирования и на основе эксперимента. В исследовании использованы методы теоретической механики и асимптотические методы, в том числе формализм Лагранжа и методика осреднения Крылова-Боголюбова.Результаты исследования. Разработана новая математическая модель динамики гироскопа с учетом неортогональности осей торсионов. Получены решение уравнений малых колебаний чувствительного элемента гироскопа и оценка угла прецессии для случая подвижного основания. Проведен сравнительный анализ разработанной модели с экспериментальными данными, полученными в случае свободных колебаний чувствительного элемента гироскопа при неподвижном основании. По результатам анализа подтверждена адекватность построенной математической модели. Сформированы аналитические выражения, демонстрирующие тот факт, что неортогональность осей торсионов приводит к перекрестному влиянию амплитуд первичных колебаний на амплитуды вторичных колебаний чувствительного элемента и появлению дополнительной погрешности в показаниях угловой скорости при работе гироскопа в свободном режиме.Обсуждение и заключения. Полученные результаты могут быть использованы для повышения точности прибора с помощью алгоритма аналитической компенсации погрешности гироскопа и методики идентификации параметров математической модели.
Гироскоп r-r-типа, прецессия гироскопа, оценка погрешности гироскопа, микромеханический гироскоп, свободные колебания
Короткий адрес: https://sciup.org/142231883
IDR: 142231883 | УДК: 531.383 | DOI: 10.23947/2687-1653-2021-21-3-231-238
Study on free oscillations of a micromechanical gyroscope taking into account the nonorthogonality of the torsion axes
Introduction. The paper is devoted to the study on free oscillations of the sensing element of a micromechanical R-Rtype gyroscope of frame construction developed by the Kuznetsov Research Institute of Applied Mechanics, taking into account the nonorthogonality of the torsion axes. The influence of the instrumental manufacturing error on the accuracy of a gyroscope on a movable base in the case of free oscillations is studied. The work objective was to improve the device accuracy through developing a mathematical model of an R-R type micromechanical gyroscope, taking into account the nonorthogonality of the torsion axes, and to study the influence of this error on the device accuracy. The urgency of the problem of increasing the accuracy of micromechanical gyroscopes is associated with improving the accuracy of inertial navigation systems based on micromechanical sensors.Materials and Methods. A new mathematical model that describes the gyroscope dynamics, taking into account the instrumental error of manufacturing the device, and a formula for estimating the error of a gyroscope, are proposed. The dependences of the state variables obtained from the results of modeling and on the basis of the experiment are presented. Methods of theoretical mechanics and asymptotic methods, including the Lagrange formalism and the Krylov-Bogolyubov averaging method, were used in the research.Results. A new mathematical model of the gyroscope dynamics, taking into account the nonorthogonality of the torsion axes, is developed. The solution to the equations of small oscillations of the gyroscope sensing element and the estimate of the precession angle for the case of a movable base are obtained. A comparative analysis of the developed model and the experimental data obtained in the case of free oscillations of the gyroscope sensing element with a fixed base is carried out. The analysis has confirmed the adequacy of the constructed mathematical model. Analytical expressions are formed. They demonstrate the fact that the nonorthogonality of the torsion axes causes a cross-influence of the amplitudes of the primary vibrations on the amplitudes of the secondary vibrations of the sensing element, and the appearance of an additional error in the angular velocity readings when the gyroscope is operating in free mode.Discussion and Conclusions. The results obtained can be used to improve the device accuracy using the algorithm for analytical compensation of the gyroscope error and the method for identifying the mathematical model parameters.
Текст научной статьи Исследование свободных колебаний микромеханического гироскопа с учетом неортогональности осей торсионов
УДК 531.383
Введение. Разработка высокоточных микромеханических инерциальных датчиков, в том числе микромеханических гироскопов (ММГ), применяемых для решения задач навигации и управления движением летательных аппаратов и мобильных роботов, является актуальной задачей приборостроения [1]. К достоинствам ММГ относятся малые масса и размеры, а также низкая стоимость по сравнению с гироскопами, основанными на других физических принципах. Однако к главным недостаткам ММГ относятся изменчивость его метрологических характеристик и низкая точность измерений параметров углового движения объекта (угловой скорости и угла поворота). Принцип функционирования вибрационных гироскопов основан на свойстве маятника Фуко сохранять плоскость малых колебаний неподвижной в инерциальном пространстве [2].
Основы теории гироскопов класса обобщенного маятника Фуко, к числу которых относятся и ММГ, изложены работах [2–5]. В них описаны различные конструктивные схемы построения ММГ, исследовано влияние инструментальных погрешностей изготовления и изменяющихся условий функционирования на динамику гироскопа. Принципиальной особенностью гироскопов класса обобщенного маятника Фуко является нелинейность, обусловленная конечными колебаниями чувствительных элементов (ЧЭ) или физической нелинейностью, связанной с особенностями системы управления колебаниями [2–6].
Исследования, посвященные динамике и конструированию ММГ, были опубликованы и в работах зарубежных авторов [6–8]. Так, например, в публикациях [6, 8] получена формула для оценки уходов гироскопа, основанная на использовании разработанной математической модели движения, которая описывает медленное изменение тороидальных координат колебаний ЧЭ. В работах [0, 7] обсуждаются вопросы изготовления ММГ и анализируются уравнения его малых колебаний. В статье [0] составляются уравнения движения ММГ с угловым (R-R-типа) и линейным (L-L-типа) осцилляторными видами движения ЧЭ. В указанной статье проводится сравнительный анализ динамики таких приборов в рамках линейных моделей и даны рекомендации по выбору параметров ММГ, исходя из условий повышения чувствительности и обеспечения требуемой полосы пропускания, а также требований к линейности масштабного коэффициента.
При проектировании ММГ разработчики стремятся использовать явление внутреннего резонанса в системе, обусловленное совмещением собственных частот колебаний ЧЭ [3, 4]. Однако в работах [0, 7] отмечается, что погрешности технологии изготовления, неизвестные и непредсказуемые отклонения элементов конструкции от проектных положений приводят к дополнительным погрешностям в измерениях прибора.
Для повышения точности измерения угловой скорости ММГ поставлена цель: исследовать свободные колебания (при отсутствии управления) ЧЭ ММГ R-R-типа с учетом эффектов, возникающих из-за неортогональности осей торсионов. Этот дефект появляется в виду несовершенства технологии изготовления прибора. Ставятся задачи разработки новой математической модели динамики ММГ с учетом неортогональности осей торсионов, оценки ухода прибора и описания влияния неортогональности осей торсионов на динамику ЧЭ ММГ.
Материалы и методы. Рассматривается модельная конструкция вибрационного ММГ R-R-типа — конструкция с промежуточной рамкой в соответствии с классификацией из источника [3]. Кинематическая схема гироскопа (рис. 1) реализована в виде двухстепенного карданного подвеса ЧЭ.
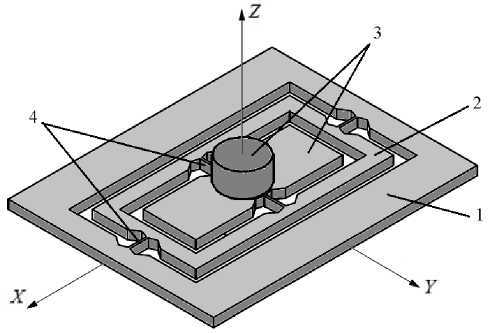
Рис. 1. Конструктивная схема прибора: 1 — основание (корпус); 2 — промежуточная (внешняя) рамка; 3 — чувствительный элемент, состоящий из сбалансированной пластины и инерционной массы; 4 — торсионы
Для описания положения ЧЭ введем системы координат (рис. 2), связанных: с корпусом прибора — OXYZ ; с внешней рамкой упругого подвеса — Ox 1 y 1 z 1; с сбалансированной пластиной — Oxyz . Причем OZ является осью чувствительности гироскопа, а система координат Ox 2 y 2 z 2 отличается от системы Ox 1 y 1 z 1 поворотом на постоянный угол неортогональности всех торсионов. В представленных системах начало координат соответствует точке O и находится в геометрическом центре сбалансированной пластины.
J 1 x ,
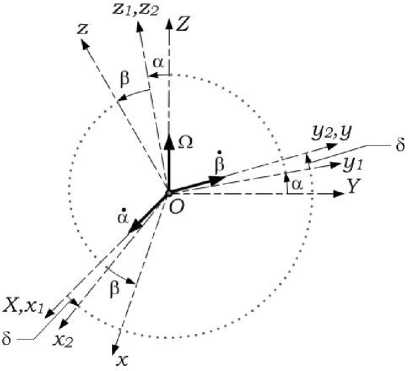
Рис. 2. Системы координат
Механика
В системе Ox 1 y 1 z 1 зададим осевые моменты инерции промежуточной рамки J 1 x , J 1 y , J 1 z , а в системе Oxyz — осевые моменты инерции ЧЭ J 2 x , J 2 y , J 2 z . Отметим, что в данной работе оси систем координат Ox 1 y 1 z 1 и Oxyz считаются главными центральными осями инерции промежуточной рамки и ЧЭ соответственно.
При моделировании движения ЧЭ принимается допущение, что конструкция торсионов обеспечивает бесконечную жесткость на изгиб. Положение ЧЭ относительно основания ММГ опишем двумя обобщенными координатами — углами а ир , а также малым постоянным углом 5 , характеризующим неортогональность осей торсионов (рис. 2). Взаимное расположение систем координат определяется последовательностью элементарных поворотов:
OXYZ ——> Ox1 y1 zx ——► Ox2 y 2 z2 ——> Oxyz, xz1y2
где под каждой стрелкой указывается ось, вокруг которой происходит поворот против хода часовой стрелки на угол, указанный над соответствующей стрелкой.
Составим уравнения динамики ЧЭ ММГ в форме уравнений Лагранжа 2-го рода [9, 10]:
d । d L dt (д а
д L дФ d ( д L
д l дФ
да да dt (д р J д р д в ,
где L = T - П — функция Лагранжа; Т и П — кинетическая и потенциальная энергии системы соответственно; Ф — диссипативная функция, характеризующая потери на внутреннее трение. Выражения для этих величин имеют вид:
r1 y sin2 а + J 1 z cos2 a ) Q 2 ) ,
Ф
где da , dp — коэффициенты трения; еа , е р — коэффициенты жесткости торсионов.
Выражения для проекций ω x , ω y , ω z угловой скорости ЧЭ на подвижные оси x , y , z имеют вид: to x = а cos в cos 5 - Q cos а sinв + Q sin а cos в sin 5,
toy = в + Q sin а cos 5 - а sin 5, toz = а sin в cos 5 + Q cos а cos в + Q sin а sin в sin 5.
Учитывая малость углов а , в и 5 , тригонометрические функции в выражениях (2) и (3) от указанных углов можно заменить их разложениями в ряд Тейлора, ограничившись слагаемыми до первого порядка малости. Тогда получим уравнения малых колебаний из уравнений движения (1), записанных с учетом выражений (2) и (3).
Используя формализм Лагранжа [9] в случае постоянной угловой скорости основания, получаем уравнения малых колебаний ЧЭ, записанные с точностью до слагаемых первого порядка малости в виде:
ωj ω а + m2 а = j1Qв - аа + 15 5в, в + m2 в = -j2 Qa---в + 5а,
а Qa j2 в Qe где введены следующие обозначения (аналогично тому, как это выполнено в статье [11]):
2 x
d β
ωβ J 2 y
Здесь j 1 , j 2 — безразмерные моменты инерции упругого подвеса; to , to и Qa , Qp — собственные частоты колебаний и добротности по углам а , в соответственно.
При выводе уравнений колебаний (4) угловая скорость корпуса гироскопа Q считалась малой относительно собственной частоты ^ , т.е. |Q| << ma , а также угол 5 полагался малой величиной, т. е. 5 << 1. Отметим, что в уравнениях (4) отброшены слагаемые, обусловленные наличием геометрической нелинейности ММГ. Влияние нелинейности геометрии движения ЧЭ на динамику ММГ R-R-типа описано в монографии [5].
Принимая во внимание, что правые части уравнений (4) являются малыми возмущениями, т. е. а + m 2 а = O ( s ) , то с точностью до слагаемых первого порядка малости можно записать: а = - ю 2 а + O ( ^ ) . Таким образом, из правой части уравнений (4) исключаются вторые производные углов а и в .
Рассмотрим случай изотропного упругого подвеса, т. е. равенства собственных частот колебаний и равных добротностей:
«а = «в = «0, Qa = Qp = Q , где «0 — характерное значение собственной частоты колебаний; Q — характерное значение добротности.
Отметим, что случай наличия разнодобротнсти (Qa Ф Qp ) и малой разночастотности (« Ф «р ) при исследовании свободных колебаний ЧЭ ММГ рассмотрен в статье [11]. При введенных обозначениях и принятых допущениях запишем уравнения движения ЧЭ с точностью до слагаемых первого порядка малости в безразмерном виде:
а + о ’ а = jx И в - Q 'оо а - -j 1- S ш 2 в, 01 0 j 2 0 (5)
Р + ^ 0 в = — j 2 И а — Q ^р — дю 0 а .
Отметим, что система уравнений (5) приводится к стандартной форме записи регулярно возмущенной системы дифференциальных уравнений с одной быстрой угловой переменной [12, 14]. Одним из распространенных способов нахождения решения регулярно возмущенных систем является использование асимптотических методов разделения движений [12–15].
Решение нелинейных уравнений (5) получим с помощью методики осреднения Крылова — Боголюбова [13], а в качестве медленно меняющихся переменных будем использовать переменные Ван-дер-Поля [12] p 1 , q 1 , p 2 , q 2 :
а = р1 sin (®01) + q1 cos (®01), а = ®0 р1 cos (ю01) — w0 q1 sin (w01), в = р2 sin ( w01) + q2 cos ( ю01), в = ю0P2 cos (ю01)- ю0q2 sin ( ю01).
С помощью процедуры осреднения [14, 15] по явно входящему времени, получаем осредненную систему дифференциальных уравнений, разрешенную относительно производных медленных переменных Вандер-Поля:
|
р ‘ = |
1 ^—1 j1 и — -Q р 1 +--- p 2 2 2 « 0 |
- Sq 2 j 2 q 2 , |
q ‘ = - |
1 — i j1 И j 1 S --Q q 1 + Z-- q 2 +T- р 2 , 2 2 « 0 2 j 2 |
(6) |
|
р 2 = |
1 ^1 j 2 И — -Q р 2 —-- р 1 2 2 « 0 |
s - 2 q 1, |
q 2 = |
1 — 1 j 2 И s — -Q q 2 — —q 1 +- р 1 - 2 2 « 0 2 |
Штрихом в уравнениях (6) обозначено дифференцирование по безразмерному времени т = « 0 1 .
Полученная модель в виде линейных дифференциальных уравнений описывает свободные колебания
ЧЭ гироскопа на подвижном основании. Решение системы уравнений (6) можно записать в виде:
' р 20 - ’О ) Sin( Т , 22
р ( т ) = exp
|
q 1 ( т ) = exp ^ |
— 2 Q ]. |
q ,0 cos(V v ‘ + YT h jjLVl-^^^, j 2 V V 2 + Y 1 |
$ in ( 4V 2 + Y 2т ) , |
|
р 2 ( т ) = exP | |
Т 1 .— 2 Q ) |
р 20 cos ( 4777 т ) — в: .y^si L v 7 V1 7v + y |
sin ( 4v 2 + Y 2т ) |
|
f q 2 ( т ) = exp 1 |
— т 1 2 Q J |
q „cos ( V2 ■ + ? 2 r ) j .( ^q^, L V j 4h ^v 2 + Y2 |
5 in ( 4V 2 + Y2т ) |
где р 10 = p 1 ( 0 ) , р 20 = р 2 ( 0 ) , q 10 = q 1 ( 0 ) , q 20 = q 2 ( 0) — начальные условия; безразмерная угловая скорость основания прибора v = ^ j 1 j 2 q/ ( 2ю0 ) ; параметр, характеризующий неортогональность осей торсионов у = j ( 2 V j T) .
Вторые слагаемые в формулах (7) характеризуют перекрестное влияние первичных колебаний на вторичные колебания и наоборот. Отметим, что в случае ортогональных осей торсионов, когда у = 0, решение (7) совпадает с результатами работы [5].
Полученные аналитические решения (7) уравнений колебаний представляют интерес для разработки методик идентификации параметров, а также прогнозирования ухода гироскопа и его учета при использовании методики алгоритмической компенсации погрешностей.
Механика
Результаты исследования. Для валидации разработанной модели сравним результаты моделирования, вычисленные по формулам (7), с экспериментальными данными. Измерительная информация получена с помощью системы наблюдения. В качестве измерительной информации электростатических датчиков имеем переменные Ван-дер-Поля p 1 , q 1 , p 2 , q 2 .
В эксперименте использован образец прибора со следующими параметрами математической модели при неподвижном основании ( v = 0): Q = 3856, j1 = j 2 = 1, у = 0,2 - 10 - 5, в качестве начальных условий для переменных Ван-дер-Поля выбраны значения равные измерениям в начальный момент времени:
р 10 = 13,467 - 10 - 3, q 10 = 20,429 - 10 - 3, р 20 = 0,787 - 10 3 , q 20 = 1,172 - 10 - 3.
Значение параметра у соответствует углу неортогональности осей торсионов 5 равного одной угловой секунде. Графическое представление зависимостей переменных Ван-дер-Поля р 1 ( г ) , q1 ( г ) , р 2 ( г ) , q 2 ( г ) медленно меняющихся с течением безразмерного времени, приведено на рисунке 3.
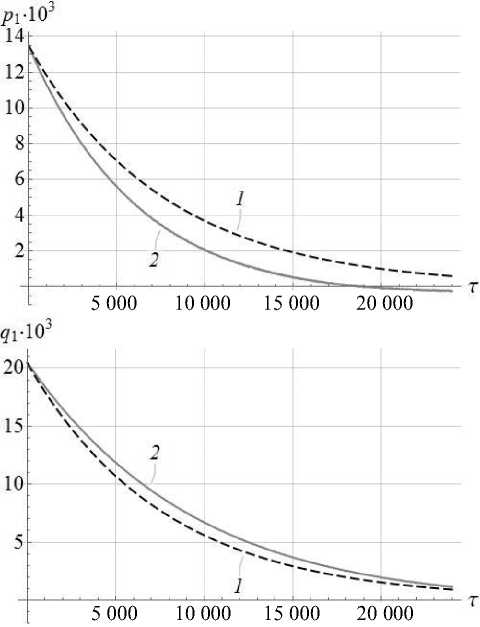
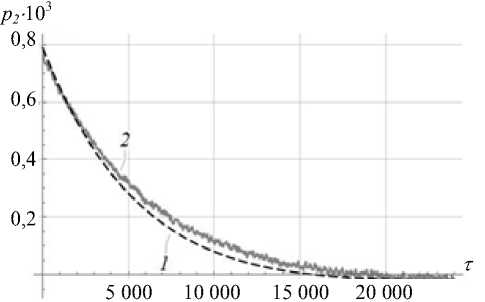
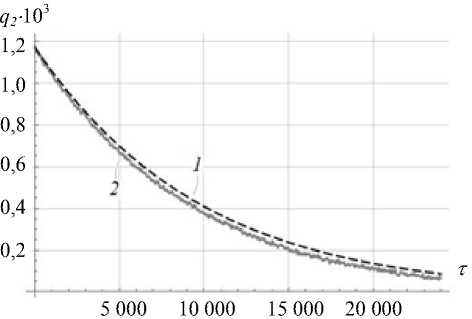
Рис. 3. Зависимости переменных Ван-дер-Поля: 1 — результаты моделирования; 2 — экспериментальные данные
Графики (рис. 3) демонстрируют значительное совпадение зависимостей для переменных p2, q2 , полученных по результатам моделирования, с экспериментальными данными. Зависимости для переменных p1 , q1 , полученные по результатам моделирования, качественно согласуются с данными эксперимента, а
наблюдаемые небольшие количественные отклонения могут быть обусловлены нелинейными эффектами, такими как нелинейность геометрии движения ЧЭ [5], или явлениями разнодобротности, разночастотности и погрешностью смещения инерционной массы [11]. Рассмотрение нелинейных эффектов, влияющих на динамику ММГ, при построении математических моделей колебаний ЧЭ увеличивает точность микромеханических датчиков в составе инерциальных навигационных систем [2].
Уход гироскопа из-за нелинейных эффектов и других инструментальных погрешностей будем оценивать с помощью вспомогательного функционала I [5, 6, 8]:
-
2 j T ( q 1 q 2 + Р 1 р 2 ) j 2 ( q 2 + Р 1 2 ) - j 1 ( q 2 + р 2 2 ) ,
который связан с углом 6 через соотношение:
9 = 1 arctan
(I).
Причем этот параметр пропорционален интегралу от угловой скорости:
е = - j j ^ C r , ) d T x .
С помощью формулы (8), учитывая решение (7), можно оценивать уход гироскопа, связанный с неортогональностью осей торсионов, возникшей из-за несовершенства технологии изготовления. На рис. 4. представлены зависимости функционала I от безразмерного времени по результатам эксперимента и расчета по формуле (8).
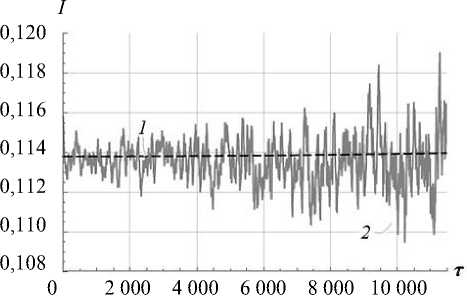
Рис. 4. Зависимость функционала I ( т ) : 1 — результаты моделирования; 2 — экспериментальные данные
Близость оценки ухода (рис. 4) и переменных Ван-дер-Поля (рис. 3), полученных аналитически, с экспериментальными данными характеризуют хорошую точность построенной модели, особенно если учесть тот факт, что в ней пренебрегались нелинейные эффекты, а также явления разночастотности и разнодобротности. Несмотря на указанные пренебрежения, модель позволяет построить методики идентификации параметров, с помощью которых можно уточнить зависимости, полученные при моделировании. Применение методик идентификации параметров математической модели приведет к повышению точности ММГ в режиме вынужденных колебаний, который является рабочим режимом гироскопов.
Обсуждение и заключения. Построена новая математическая модель ММГ R-R-типа для режима свободных колебаний ЧЭ. В модели учитывается неортогональность осей торсионов, возникающая в следствие технологической невозможности обеспечить высокую точность изготовления прибора. Получена формула оценки угла прецессии при подвижном основании прибора. Посредством сравнения результатов моделирования с данными эксперимента проведена валидация математической модели ММГ. Показано, что неортогональность осей торсионов приводит к перекрестному влиянию первичных колебаний на величину вторичных колебаний и наоборот. Результаты работы могут быть использованы в алгоритме аналитической компенсации погрешности гироскопа с целью повышения точности ММГ.
Список литературы Исследование свободных колебаний микромеханического гироскопа с учетом неортогональности осей торсионов
- Peshekhonov, V. G. Gyroscopic navigation systems: Current status and prospects / V. G. Peshekhonov // Gyroscopy and Navigation. — 20II. — Vol. 2 (3). — P. III-II8.
- Журавлев, В. Ф. Управляемый маятник Фуко как модель одного класса свободных гироскопов / В. Ф. Журавлев // Известия РАН. Механика твердого тела. — I997. — Вып. 6. — С. 27-35.
- Распопов, В. Я. Микромеханические приборы / В. Я. Распопов. — Москва : Машиностроение, 2007. — 400 с.
- Неаполитанский, А. С. Микромеханические вибрационные гироскопы / А. С. Неаполитанский, Б. В. Хромов. — Москва : Когито-центр, 2002. — I22 с.
- Меркурьев, И. В. Динамика микромеханического и волнового твердотельного гироскопов / И. В. Меркурьев, В. В. Подалков. — Москва : Физматлит, 2009. — 228 с.
- Electronic Gain Error Compensation for Whole-Angle Coriolis Vibrating Gyroscopes with High Q Factor / Yongmeng Zhang, Tongqiao Miao, Kechen Guo [et al.] // In: Proc. IEEE Int. Symposium on Inertial Sensors and Щ Systems (INERTIAL). — 2020. — P. I-4. https://doi.org/I0.II09/INERTIAL48I29.2020.9090062 ¡g Apostolyuk, V. Theory and Design of Micromechanical Vibratory Gyroscopes / V. Apostolyuk // MEMS/NEMS Hand- $ book. — 2006. — Vol. I, chapter 6. — P. I73-I95. https://doi.org/I0.I007/0-387-25786-I 6 S
- Wei Wang. Design of a Novel MEMS Gyroscope Array / Wei Wang, Xiaoyong Lv, Feng Sun // Sensors. — 20I3. — Vol. I3 (2). — P. I65I-I663.
- Askari, S. High quality factor MEMS gyroscope with whole angle mode of operation / Sina Askari, Mohammad H. Asadian, Andrei M. Shkel // In: Proc. IEEE Int. Symposium on Inertial Sensors and Systems (INERTIAL). — 2018. — Vol. 12 (6). — P. 141-144. https://doi.org/10.1109/ISISS.2018.8358148
- Маркеев, А. П. Теоретическая механика / А. П. Маркеев. — Москва, Ижевск : РХД, 2007. — 592 с.
- Теоретическая механика / С. В. Болотин, А. В. Карапетян, Е. И. Кугушев, Д. В. Трещев. — Москва : Академия, 2010. — 432 с.
- Сайпулаев, М. Р. Динамика и точность микромеханического гироскопа с учетом смещения инерционной массы / М. Р. Сайпулаев, И. В. Меркурьев // Вестник Бурятского государственного университета. Математика, информатика. — 2020. — Вып. 3. — С. 49-62. https://doi.org/10.18101/2304-5728-2020-3-49-62
- Asymptotic Methods in Mechanics of Solids / Andrei L. Smirnov, Sergei Filippov, Petr E. Tovstik [et al.] — Birkhauser Basel: International Series of Numerical Mathematics; 2015. — 323 p.
- Awrejcewicz, J. Introduction to asymptotic methods / J. Awrejcewicz, V. A. Krys'ko. — Boca Raton Fl: Chapman & Hall / CRC; 2006. — 242 p.
- Burd, V. Method of Averaging for Differential Equations on an Infinite Interval: Theory and Applications / V. Burd. — Chapman & Hall/CRC; 2007. — 343 p.
- Медведев, Г. Н. Лекции по методу усреднения / Г. Н. Медведев. — Москва : Физический факультет МГУ, 2019. — 109 с.
