Исследование точности позиционирования автоматизированного пневмопривода с внешним тормозным устройством

Автор: Дао Тхе Ань, Сидоренко Валентин Сергеевич, Дымочкин Денис Димитриевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 4 (83) т.15, 2015 года.
Бесплатный доступ
Цель данной работы - представить схемотехническое решение автоматизированного пневмопривода (АПП) с внешним тормозным устройством. В качестве такого устройства выступает управляемый пневмомеханический тормоз, обеспечивающий сокращение длительности процесса позиционирования, повышение точности останова и надежную фиксацию механизма в заданных координатах. Использование экспериментально исследуемого привода с автоматизированным измерительным комплексом создает условия для осциллографирования процесса позиционирования в реальном времени и пространстве, а также обеспечивает достоверные результаты эксперимента. Авторами создан специальный стенд - модель предлагаемого привода, позволяющая исследовать влияние точности позиционирования предлагаемого привода при различных параметрах его функционирования. Установлены кинематические и силовые характеристики привода при автоматическом управлении потоком сжатого воздуха. В результате выявлено влияние скорости позиционирования и управляющего давления тормоза на точность привода. Сформулированы рекомендации для разработки реальных позиционных приводов повышенного быстродействия и точности позиционирования. Установлено, что при работе с настоящими позиционными приводами введение внешнего тормозного устройства - управляемого пневмомеханического тормоза повышает точность позиционирования в 1,25-2,25 раза.
Позиционный пневмопривод, силовые характеристики, тормозное устройство, быстродействие, точность, скорость позиционирования, кинематические характеристики, внешнее тормозное устройство
Короткий адрес: https://sciup.org/14250171
IDR: 14250171 | УДК: 621. | DOI: 10.12737/16077
Study on positioning accuracy of automated pneumatic drive with an outer brake
The work objective is to introduce a design of the automated pneumatic drive (APD) with an external braking gear. It is a controlled pneumo-mechanic brake providing the process time reduction, the positioning accuracy increase, and the reliable positioning of the stop mechanism in the setpoints. The application of the prototype drive with the automated measurement complex creates conditions for the oscillographic testing of the positioning process in real time and space, and it also provides reliable experiment results. The authors have created a special stand - a model of the proposed drive that allows investigating the effect of its positional accuracy under different parameters of its operation. Kinematic and power characteristics of the drive in the automatic operation by the compressed air flow are identified. The effect of the positioning speed and the brake control pressure on the drive accuracy is resulted. Recommendations for the development of real positional drives with increased performance and positioning accuracy are formulated. It is found that the introduction of an outer braking device - the controlled pneumo-mechanic brake - improves the positioning accuracy of these drives by 1,25-2,25 times.
Текст научной статьи Исследование точности позиционирования автоматизированного пневмопривода с внешним тормозным устройством
*
**
Работа выполнена в рамках инициативной НИР.
***
Введение. В условиях современных производств возрастают требования к быстродействию и точности позиционирования пневмопривода. Данную задачу решает автоматизированный пневмопривод с оригинальным датчиком перемещения и внешним тормозным устройством. Использование указанной конструкции позволяет заметно улучшить качество управ- ления позиционным циклом.
Известно, что имеющие фиксированные структуры электропневматические позиционные приводы ограничены по мощности, точности и быстродействию. Это затрудняет их применение в условиях интенсификации технологических и рабочих процессов машин. При оценке эффективности рассматриваемого класса механизмов особые требования предъявляются к точности работы, быстродействию, устойчивости режимов функционирования. Главным образом учитываются такие параметры, как масса, скорость, координаты.
В качестве основных функциональных требований к позиционному пневмоприводу рассматриваются:
-
— регулирование и стабилизация скорости исполнительных движений;
-
— оптимальный режим перехода с ускоренных перемещений на рабочие;
-
— задание перемещений и их отработка с требуемой точностью в режиме установочных, вспомогательных и транспортных перемещений при изменяющихся нагрузках, скоростях;
-
— оптимальные рабочие процессы в заданном диапазоне силовых, кинематических и динамических параметров;
-
— фиксирование исполнительных механизмов в точке позиционирования для сохранения точности позиционирования при последующих внешних воздействиях на механизмы.
В настоящие время производители позиционных приводов (Camozzi, SMC, Festo, Pneumax, Air torque), как правило, обеспечивают торможение и позиционирование с использованием внутренних тормозных устройств, управляющих потоками сжатого воздуха [1, 2, 3, 4]. Основные недостатки таких систем связаны со сложностями управления потоками сжатого воздуха (как правило, нестационарно сжатыми) из-за изменяющихся свойств и параметров состояния рабочей среды. Итальянская компания Camozzi предлагает внешнее торможение в виде гидроамортизатора, гидродемпфера. Однако такие конструкции рационально применять для жестких позиционных циклов с ограниченным числом координат позиционирования. Что же касается многокоординатых перемещений, то в этом случае необходимы другие решения [5]. Основная часть. Для реализации обозначенных выше задач предлагается схемотехническое решение автоматизированного позиционного пневмопривода с оригинальным датчиком перемещения и внешним тормозным устройством — управляемым пневмомеханическим тормозом [6, 7]. Разработана обобщенная математическая модель такого привода, позволяющая моделировать процесс позиционирования и установить влияние основных параметров механизма на быстродействие и точность позиционирования [7, 8]. Адекватность процессов, описываемых данной моделью, подтверждается экспериментом. Решение соответствующей задачи дает возможность спланировать и осуществить многофакторный эксперимент для определения рациональных параметров быстродействия и точности настройки пневмомеханического привода (с учетом перемещаемой массы, скорости позиционирования, координат перемещения привода и управляемого давления тормоза).
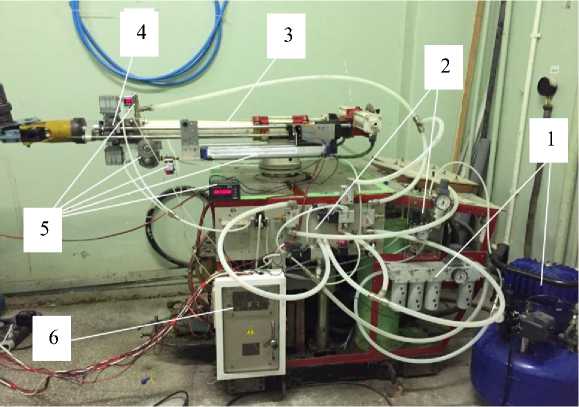
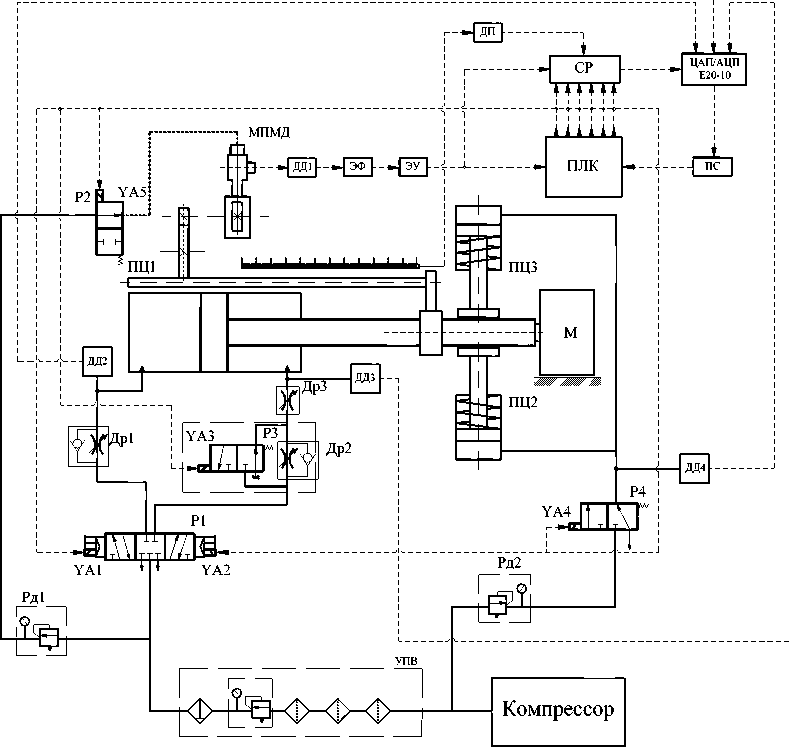
Стенд-модель для исследования АПП представлена на рис. 1. Схема стенда исследования позиционного пневмопривода (рис. 1, в) поясняет принцип действия стендового привода, являющегося макетом реального позиционного пневмопривода.
а)
Машиностроение и машиноведение
б)
в)
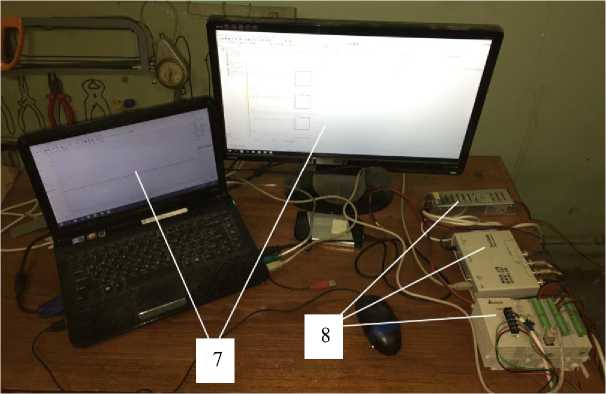
Рис. 1. Стенд — модель АПП. Общий вид: 1 — энергическая подсистема; 2 — управляемые устройства; 3 — пневмоцилиндр;
-
4 — пневмомеханическое тормозное устройство; 5 — измерительный комплекс; 6 — электрическая панель (а). Автоматизированный управляемый комплекс: 7 — персональный компьютер; 8 — блок управления (б). Схема стенда: УПВ — узел подготовки воздуха; Рд1, Рд2 — регуляторы давления; YА1, YА2, YА3, YА4, YА5 — электромагниты; Р1, Р2, Р3, Р4 — пневмораспределители; Др1, Др2, Др3 — пневмодроссели с обратным клапаном; ДД1, ДД2, ДД3, ДД4 — датчики давления; ПЦ1 — силовой пневмоцилиндр; ПЦ2, ПЦ3 — пневмоцилиндры торможения; М — приведенная масса; МПМД — многопараметрический пневмомеханический датчик; ЭФ — электрическая фильтрация; ЭУ — электрический усилитель; ПЛК — программируемый логический контроллер; ДП — датчик перемещения; СР — система резисторов; ЦАП/АЦП Е20-10 — аналого-цифровой преобразователь; ПС — персональный компьютер (д)
Принцип работы схемы стенда описан в [6]. Стенд оснащен автоматизированным измерительным комплексом, обеспечивающим сбор и обработку информации о состоянии и функционировании привода. Программируемый логический контроллер (ПЛК) служит для: — организации позиционного цикла;
-
— задания координат для переключения управления циклом и остановом;
-
— формирования управляющих сигналов на электромагнитах пневмораспределителей в соответствии с заложенным алгоритмом управления позиционным циклом привода.
Многопараметрический пневмомеханический датчик передает информацию о перемещении исполнительного механизма стенда и позволяет преобразовать перемещение пневмоцилиндра в импульсные электрические сигналы.
Установлены два регулятора расхода для фиксирования давления, подаваемого на датчик и тормоз. Пневмомеханическая подсистема стенда позволяет исследовать представленные в табл. 1 параметры позиционного пневмопривода.
Таблица 1
Диапазоны варьирования основных параметров позиционного пневмопривода
|
Наименование параметров |
Диапазон |
|
Скорость позиционирования, мм/с |
10–100 |
|
Рабочее давление в пневмосистеме, бар |
2–8 |
|
Перемещаемая масса, кг |
5–17 |
|
Координата точки позиционирования, мм |
80–300 |
|
Температура в пневмосистеме, К |
273–310 |
|
Скорость быстрого подвода привода м/с |
До 0,4 |
Гидравлические и кинематические характеристики пневмоцилиндра измерялись датчиками. Выбег L в пневмоцилиндра определялся при преобразовании перемещения L в число импульсов давлений датчика. Давление в напорной, сливной линиях и цилиндрах торможения в нестационарном режиме исследовалось с помощью датчиков давления ДД2, ДД4 с погрешностью измерения 1 % от номинального диапазона. Рабочая температура — 273 0 K–323 0 K, влияние температуры — ± 3 % от номинального диапазона.
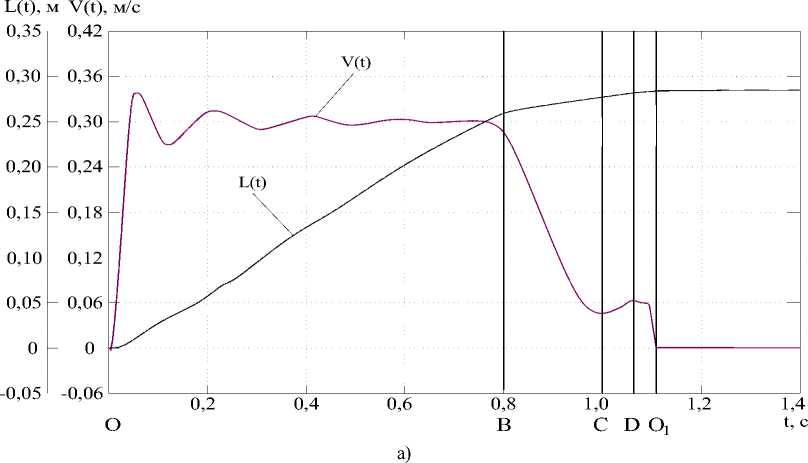
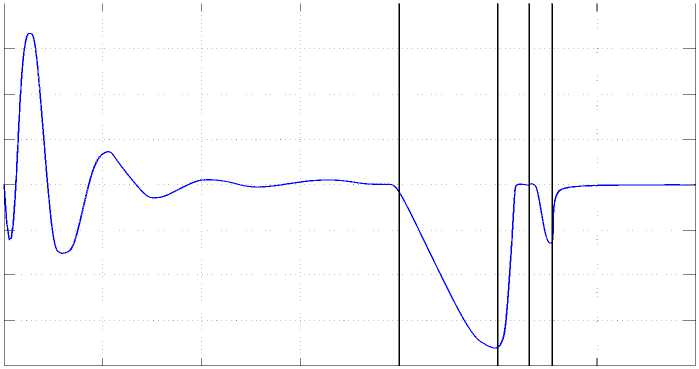
На рис. 2 представлены осциллограммы типового позиционного цикла АПП, фиксирующие изменение основных параметров привода.
Машиностроение и машиноведение
-8
а (t) , м / с 2 8
-2
-4
-6
0,2
0,4
0,6
0,8 В
1,4 t, c
1,0 1,2
С D О 1
O
б)
Рис. 2. Осциллограммы экспериментального автоматизированного пневмопривода с внешним тормозным устройством: V(t) — скорость привода; L(t) — перемещение привода; а(t) — ускорение привода
Исследуемый позиционный цикл характерен для горизонтального движения схвата промышленного робота. После подачи команды на начало рабочего цикла осуществляются: быстрый подвод движения OB, замедление до скорости позиционирования ВD, останов DO 1 .
С учетом результатов осциллографирования выполнялась статистическая обработка по методу наименьших квадратов. Результаты измерены в соответствии с известными критериями [9, 10].
Точность позиционирования привода определяется величиной выбега Lb и его рассеиванием ALb при повторных перемещениях. При незначительном рассеивании ALb принимали ALn03 = Lb:
AL no3 = L b + AL b , (1)
где Lв — положительный выбег гидроцилиндра, мм; ∆Lв — рассеивание выбега, мм.
Результаты вычислительного и натурного экспериментов исследования позиционного цикла при различных значениях параметров позволили установить, каким образом управляющее давление Р toz влияет на точность позиционирования предлагаемого АПП. Влияние скорости позиционирования Vпзi на точность позиционирования оценивалось с помощью коэффициента замедления kЗ , определяемого выражением:
-
V .
k з = , (2)
-
V бп
где V бп = 0,3 м/с — скорость быстрого подвода; V пзi — скорость позиционирования после замедления.
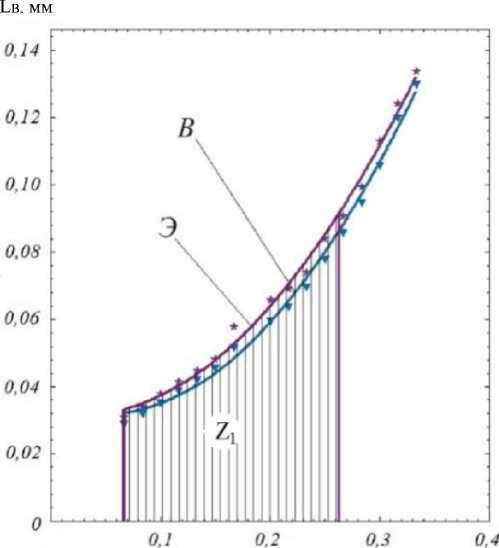
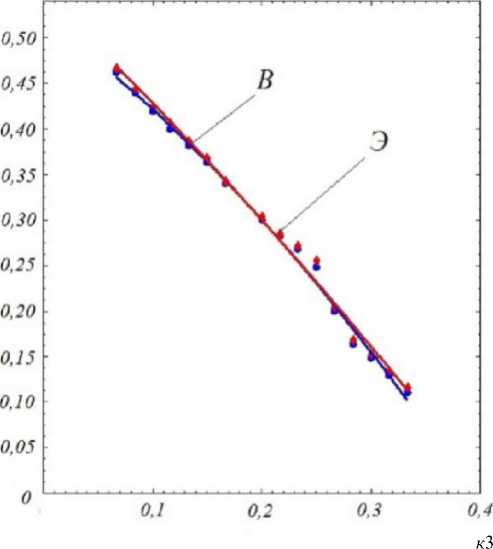
На рис. 3 представлены графики зависимости точности и длительности позиционирования от коэффициента замедления kЗ при управляющем давлении тормоза Р toz = 5 бар. При удовлетворительном совпадении результатов вычислений и натурных экспериментов установлено их существенное влияние на длительность Tд и точность позиционирования Lв . Так, при увеличении скорости позиционирования в 4 раза (от 0,025 м/с до 0,1 м/с) длительность позиционирования уменьшается в 4,5 раза и точность снижается в 4,2 раза. В зоне устойчивого позиционирования АПП исследовано влияние скорости Vпзi на точность позиционирования (область Z 1 ).
к 3
а)
Tд, с
б)
Рис. 3. Влияние коэффициента замедления kз на процесс позиционирования: влияние на точность позиционирования (а); влияние на
длительность позиционирования (б); В — вычисления; Э — эксперимент
На рис. 4 представлены графики зависимости точности позиционирования привода от управляющего давления тормоза Р toz при скорости V пзi = 50 мм/с.
Машиностроение и машиноведение
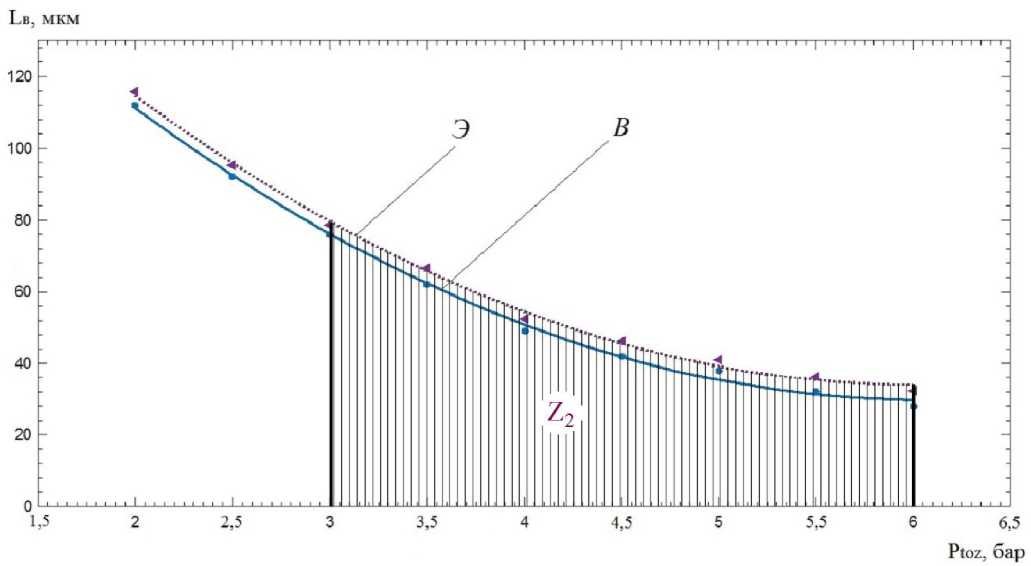
Рис. 4. Зависимость точности позиционирования АПП от управляющего давления тормоза: В — вычисления, Э — эксперимент
На рис. 4 видно, что при увеличении тормозного давления в 3 раза точность позиционирования повышается в 2,95 раза. Зона устойчивого позиционирования определяется в области Z 2 .
Полученные результаты демонстрируют качественное и количественное решение задачи данного исследования. Таким образом, можно утверждать, что цель работы достигнута. Это, в свою очередь, позволяет предложить практические рекомендации для разработки и эксплуатации реальных позиционных автоматизированных пневмоприводов с внешним тормозным устройством.
В зонах устойчивого позиционирования автоматизированного пневмопривода (см. рис. 3, 4) точность позиционирования составляет 40–80 мкм, что в 1,25–2,25 раза выше, чем у серийно выпускаемых приводов (например, у компаний Camozzi, Festo она составляет 100 мкм).
Выводы. Экспериментальные исследования пневмопривода на стенде-модели подтверждают его работоспобность при реализации различных позиционных циклов.
Установлена зависимость точности позиционирования от основных параметров пневмопривода и внешнего тормозного устройства (скорость позиционирования, управляющее давление тормоза).
При удовлетворительном совпадении результатов вычислительного и натурного экспериментов подтверждается адекватность обобщенной математической модели привода. Определены зоны устойчивого позиционирования процесса автоматизированного пневмопривода, необходимые при разработке и настройке реальных автоматизированных пневмоприводов.
Библиографический список
Список литературы Исследование точности позиционирования автоматизированного пневмопривода с внешним тормозным устройством
- Taghizadeh, M. Modeling and identification of a solenoid valve for PWM control applications/M. Taghizadeh, A. Ghaffari, F. Najafi//Comptes Rendus Mécanique at ScienceDirect.com. -2009. -Vol. 337. -P. 131-140.
- Wang, J. Energy Optimal Control of Servo-Pneumatic Cylinders through Nonlinear Static Feedback Linearization/Jihong Wang, T. Gordon//Journal of Dynamic Systems, Measurement and Control. -2012. -№ 5. -Vol. 134. -P. 1-11.
- Modelling and Controller Design of Electro-Pneumatic Actuator Based on PWM/Behrouz Najjari //International Journal of Robotics and Automation. -2012. -Vol. 1, № 3. -P. 125-136.
- Falcão Carneiro, J. A high-accuracy trajectory following controller for pneumatic devices/J. Falcão Carneiro, F. Gomes de Almeida//International Journal of Advanced Manufacturing Technology. -2012. -№ 61. -P. 253-267.
- Camozzi. Большой каталог. Пневматическая аппаратура. Версия 8.5/Camozzi spa. -Москва: Салта ЛТД, 2012. -C. 1070.
- Дао Тхе Ань. Многопараметрический пневмомеханический датчик позиционных пневмоприводов /Дао Тхе Ань, В. С. Сидоренко, Д. Д. Дымочкин//Инженерный вестник Дона. -2015. -№ 2. -Режим доступа: http://ivdon.ru/ru/magazine/archive/n2p2y2015/3055 (дата обращения 15.06.15).
- Дао Тхе Ань. Моделирование процессов позиционирования быстродействующего пневмопривода робота/Дао Тхе Ань, В. С. Сидоренко//Фундаментальные исследования. -2015. -№ 7, часть 2. -С. 285-292.
- Dao The Anh. Dynamics of position fast robot with pneumatic drive of brake unit/Dao The Anh, V. S. Sidorenko, D. D. Dymochkin//Dynamics and vibroacoustics of machines: conference. -Samara, September 15-17, 2014. -Vol. 3. -P. 176-183.
- Джонсон, Н. Статистика и планирование эксперимента в технике и науке. Методы планирования эксперимента/Н. Джонсон, Ф. Лион; под ред. Э. К. Лецкого, Е. В. Марковой. -Москва: Мир, 1981. -516 с.
- Львовский, Е. Н. Статистические методы построения эмпирических формул/Е. Н. Львовский. -Москва: Высшая школа, 1988. -239 с.
