Исследование топологий нагрузочных устройств с двойным регулированием для испытаний систем электропитания космических аппаратов

Автор: Федченко А.С., Мизрах Е.А., Лобанов Д.К.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 3 т.18, 2017 года.
Бесплатный доступ
Исследованы возможные топологии нагрузочных устройств, имеющих в своём составе непрерывный регу- лирующий элемент и импульсный преобразователь. При разработке и испытаниях систем электропитания космических аппаратов возникает потребность в устройствах, имитирующих различные электрические характеристики полезной нагрузки. Эта задача решается с использованием специализированных нагрузочных устройств, которые позволяют обеспечивать требуемую точность воспроизведения статических и динами- ческих характеристик имитируемой нагрузки. Кроме того, существует возможность посредством нагрузоч- ных устройств производить рекуперацию избыточной электроэнергии в питающую сеть переменного или постоянного тока, что, в свою очередь, позволяет повысить качество испытаний систем электропитания. Разработка устройства, позволяющего одновременно обеспечивать и заданную точность воспроизведения электрических характеристик полезной нагрузки, и рекуперацию избыточной электроэнергии, сопряжена с рядом технических сложностей, которые могут быть решены путём использования нагрузочного устройст- ва, которое имеет в своём составе два управляемых стабилизатора: быстродействующий непрерывный регу- лятор и импульсный преобразователь, ограничивающий рассеиваемую мощность непрерывного регулятора и позволяющий обеспечить рекуперацию в питающую сеть. Рассмотрены различные свойства топологий нагрузочных устройств с двойным регулированием, выделены наиболее перспективные топологии для использования в качестве нагрузочных устройств для испытания систем электропитания космических аппаратов. Разработано математическое описание нагрузочного уст- ройства, используемого в составе испытательного комплекса, проведён анализ адмиттансно-частотных характеристик и качества подавления пульсаций для различных топологий. Рассмотрены аспекты работы нагрузочных устройств, связанные с режимом наведения помех по входному току, определены параметры, определяющие полосу наводимых частот различных топологий при равных условиях, определены условия воз- можности наведения помех заданной величины в четырёх топологиях.
Нагрузочное устройство, проведение испытаний, системы управления, электронное оборудование, системы электропитания
Короткий адрес: https://sciup.org/148177742
IDR: 148177742 | УДК: 621.3.088.7
Study of dual control electronic loads for spacecraft electrical power system tests
In the article the possible topologies of electronic loads consisting of linear regulator and switched-mode converter are studied. During developing and testing of spacecraft power supply systems, there is a need for devices that simulate various electrical characteristics of the spacecraft payload. This problem can be solved using specialized electronic loads that allow reproducing static and dynamic characteristics of the simulated payload with required accuracy. In addition, using electronic loads it is possible to return unused electrical energy into a DC or AC power supply network, which, in turn, makes it possible to improve the quality of power supply system tests. The development of a device that simultaneously provides both specified accuracy of reproduction of payload electrical characteristics and the recovery of surplus electric power is associated with a number of technical difficulties that can be solved by using an electronic load that includes two controllable stabilizers: a high-speed linear regulator and a switched-mode converter which limits the dissipated power of the linear regulator and provides recovering an excess electrical energy to the supply network. Various properties of dual control electronic load topologies were considered, the most promising topologies that can be used as electronic loads for spacecraft power systems tests were highlighted. A mathematical description of the electronic load used in the test setup was developed, an analysis of the admittances and the quality of noise suppression for various topologies was performed. The aspects of the electronic load operation related to the input current interfer- ing mode, the parameters determining the frequency range of the interfered noise, and the conditions for the possibility of the interference were determined for four topologies under the same conditions.
Текст научной статьи Исследование топологий нагрузочных устройств с двойным регулированием для испытаний систем электропитания космических аппаратов
Введение. Важной составляющей процесса разработки космического аппарата (КА) является этап проведения испытаний систем электропитания (СЭП). Электрические испытания СЭП КА, в ходе которых определяется соответствие разработанной СЭП заявленным требованиям, проводятся с использованием специализированных нагрузочных устройств (НУ), имитирующих статические и динамические электрические характеристики полезной нагрузки. Такие НУ используются для решения широкого спектра задач, возникающих при испытаниях СЭП [1–6], в связи с чем при проектировании НУ выделяется ряд технических требований, среди которых:
-
а) обеспечение работы устройства в заданных диапазонах изменения входных напряжения и тока;
-
б) воспроизведение нескольких видов вольт-амперных характеристик (ВАХ) имитируемых нагрузок;
-
в) обеспечение требуемой погрешности воспроизведения ВАХ имитируемых нагрузок;
-
г) наведение гармонических и импульсных помех в заданной полосе частот;
-
д) обеспечение рекуперации при заданном коэффициенте использования энергии.
Выполнение всех предъявленных к проектируемому НУ требований может стать трудноосуществимой задачей, особенно при необходимости обеспечения высокого быстродействия и мощности рассеяния порядка нескольких кВт [7–14]. Одним из возможных решений является использование НУ с двойным регулированием, имеющих в своём составе два регулирующих элемента и позволяющих совмещать в себе хорошие динамические характеристики НРЭ и возможность организации рекуперации посредством ИП, что ведёт также к улучшению массогабаритных характеристик НУ [15–17].
Топологии нагрузочных устройств с двойным регулированием. Основная идея НУ с двойным регулированием заключается в том, что стабилизацию непосредственно входного тока осуществляет НРЭ, в то время как ИП ограничивает мощность, рассеиваемую на НРЭ. При этом реализация НУ с двойным регулированием возможна по двум схемам соединения НРЭ и ИП: параллельной и последовательной. В параллельной схеме стабилизация мощности НРЭ достигается посредством ограничения тока, протекающего через НРЭ, в последовательной схеме – посредством ограничения падения напряжения на НРЭ. Иначе говоря, ИП в параллельной схеме выполняет функцию стабилизатора тока, а в последовательной – стабилизатора напряжения. Для организации требуемых контуров управления параллельные схемы должны содержать два датчика тока (по одному на НРЭ и ИП), последовательные – один датчик тока (ДТ) и один датчик напряжения (ДН). Для возможности имитации различных видов ВАХ (стабилизации постоян-
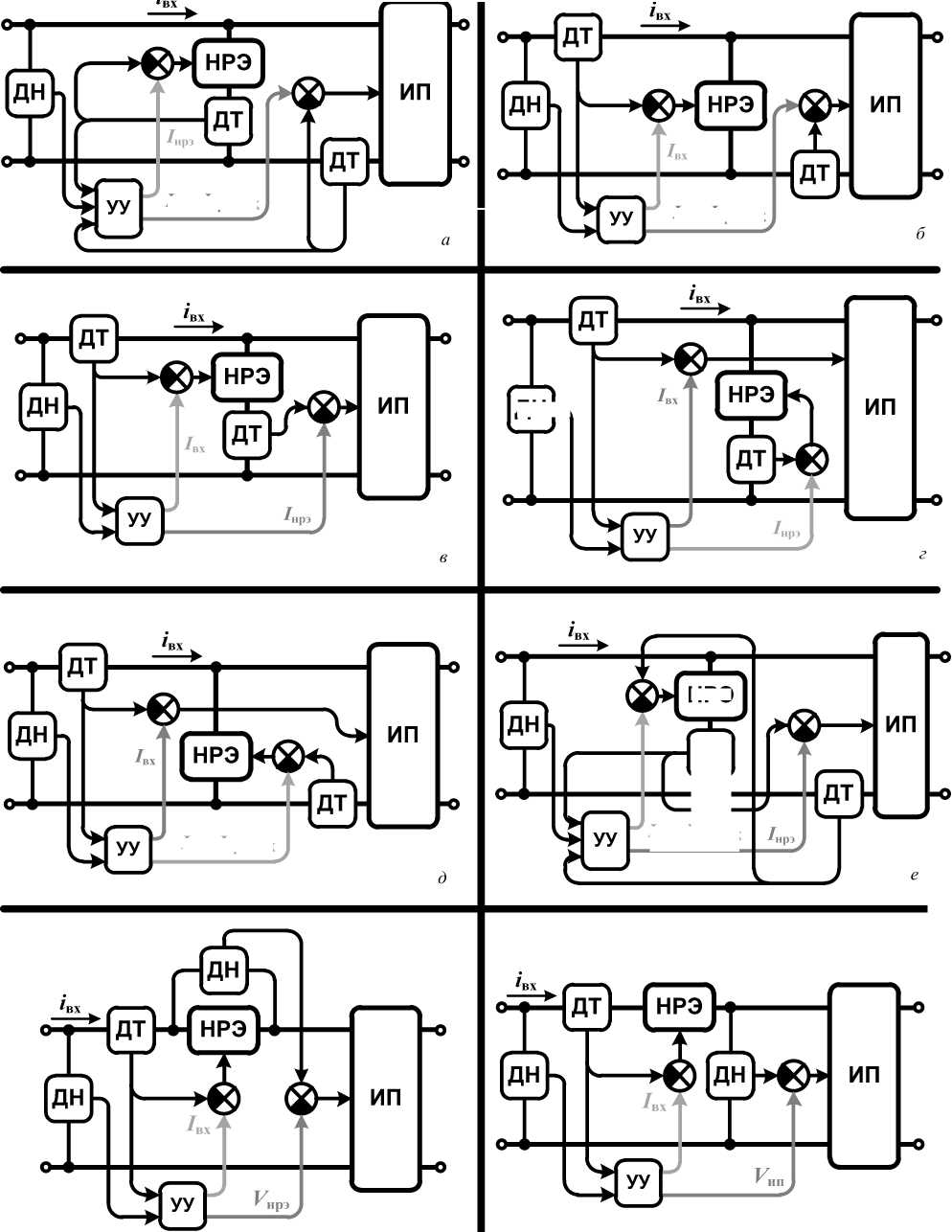
ной мощности и/или постоянного сопротивления) в обе схемы необходимо также добавить датчик входного напряжения. Принимая во внимание, что в параллельной схеме имеется три возможных места размещения датчиков тока, а в последовательной – два, возможно восемь различных топологий НУ с двойным регулированием (рис. 1).
Уставки, выдаваемые устройством управления (УУ) на НРЭ и ИП, определяются контурами управления, которые эти устройства образуют с соответствующими датчиками тока. На рис. 1 для уставок используются следующие обозначения: I вх – требуемый входной ток НУ, I нрэ – требуемый ток НРЭ, I нрэMAX – предельно допустимый ток НРЭ, I ип – требуемый ток ИП, V нрэ – требуемое напряжение НРЭ, V ип – требуемое напряжение ИП. Распределение токов между НРЭ и ИП осуществляет УУ в соответствии с заранее определённым алгоритмом.
Топологии на рис. 1, а – е представляют собой схемы с параллельным соединением НРЭ и ИП. Общей особенностью этих топологий является то, что в них возможна стабилизация различных величин тока независимо на НРЭ и ИП. Общим недостатком этих топологий является то, что амплитуда наводимых пульсаций ограничена величиной тока, протекающего через НРЭ, который при больших напряжениях испытываемой СЭП может составлять лишь малую долю общего стабилизируемого тока.
Топологии на рис. 1, ж , з представляют собой схемы с последовательным соединением НРЭ и ИП. Общей особенностью этих топологий является то, что через НРЭ и ИП протекает общий ток, который стабилизируется быстродействующим НРЭ, что позволяет подавлять помехи по входному току эффективнее, чем в параллельных топологиях. Общим недостатком этих топологий является относительно низкая живучесть, поскольку при аварии НРЭ или ИП возможно создание аварийной ситуации. Кроме того, работоспособность последовательных схем зависит от индуктивности источника и проводов (подробнее этот вопрос будет рассмотрен ниже).
Во всех топологиях сигналы с датчиков тока и напряжений поступают на сумматоры и УУ, которое также может исполнять роль устройства защиты. На УУ, в частности, поступают те сигналы с ДТ, которые позволяют определить величину входного тока НУ, на основе которого УУ формирует сигналы управления для НРЭ и ИП. Так, в топологиях «а» и «е» на УУ подаются сигналы с обоих ДТ, что усложняет структуру УУ (требуется дополнительный входной канал). С другой стороны, в топологиях «б»–«д» и «ж», «з» УУ получает информацию о величине тока только в одном из элементов НУ (НРЭ или ИП), что создаёт дополнительные сложности в случае, когда УУ выполняет также и роль устройства защиты.
дн -х
НРЭ
з
Рис. 1. Возможные топологии нагрузочных устройств с двойным регулированием: а–е – схемы с параллельным соединением НРЭ и ИП; ж , з – схемы с последовательным соединением НРЭ и ИП
*вх ^нрэМАХ
*вх ^нрэМАХ
дт
^вх ^нрэМАХ
^вх ЛфэМАХ
Fig. 1. Possible E-load topologies with double regulation
Свойства отдельных топологий
|
Свойства |
«а» |
«б» |
«в» |
«г» |
«д» |
«е» |
«ж» |
«з» |
|
Повышенная живучесть |
+ |
+ |
+ |
|||||
|
Независимое наведение помех на НРЭ/ИП |
+ |
+ |
+ |
|||||
|
Широкая полоса пропускания |
+ |
+ |
+ |
+ |
||||
|
Независимость разработки НРЭ и ИП |
+ |
+ |
+ |
|||||
|
Фильтрация входного тока |
+ |
+ |
+ |
+ |
||||
|
Контроль величины входного тока НУ |
+ |
+ |
+ |
+ |
+ |
+ |
||
|
Диагностика НРЭ и ИП |
+ |
+ |
||||||
|
Быстрое ступенчатое увеличение входного тока |
+ |
+ |
+ |
+ |
+ |
+ |
||
|
Быстрое ступенчатое уменьшение входного тока |
+ |
+ |
Для определения наиболее перспективных топологий была проведена сравнительная оценка (см. таблицу) по следующим критериям:
-
- повышенная живучесть: при выходе из строя НРЭ есть возможность продолжения работы за счёт ИП;
-
- независимое наведение помех на НРЭ/ИП: возможность наведения гармонических управляющих сигналов как на НРЭ, так и на и ИП, что даёт возможность организовать схему наведения помех с минимальными гармоническими искажениями на частоте, близкой к частоте среза ИП;
-
- широкая полоса пропускания: возможность наведения помех по входному току посредством быстродействующего НРЭ в широкой полосе частот;
-
- более экономичные ДТ: возможность использования ДТ с лучшими характеристиками, поскольку через этот ДТ протекает меньшая часть общего тока;
-
- независимость разработки НРЭ и ИП: возможность разработки и испытания ИП и/или НРЭ независимо друг от друга;
-
- фильтрация входного тока: НРЭ фильтрует помехи и пульсации по входному току, в том числе помехи, создаваемые ИП;
-
- контроль величины входного тока: в схеме присутствует датчик непосредственно стабилизируемой величины - общего входного тока, что повышает точность стабилизации;
-
- диагностика НРЭ и ИП: ввиду наличия у НРЭ и ИП отдельных датчиков, существует возможность реализации в УУ функции диагностики работоспособности НРЭ и ИП без введения в схему дополнительных элементов;
-
- быстрое ступенчатое увеличение тока: в параллельных топологиях «а»-«е» (см. рис. 1) ток увеличивается с тем быстродействием, которое обеспечивает быстродействующий НРЭ (при уменьшении тока на большое значение НРЭ полностью закроется, и ток будет уменьшаться с быстродействием ИП);
-
- быстрое ступенчатое уменьшение тока: в последовательных топологиях «ж», «з» (см. рис. 1) ток уменьшается с тем быстродействием, которое обеспечивает быстродействующий НРЭ (при увеличении тока на большое значение НРЭ полностью откроется, и ток будет увеличиваться с быстродействием ИП).
На основе приведённых выше положительных и отрицательных качеств каждой топологии был сделан вывод, что топологии «а»-«в» и «ж» представляют наибольший интерес для дальнейшего рассмотрения.
Математическое описание. На рис. 2 представлена схема замещения устройств, совместно с которыми работает НУ при проведении испытаний СЭП КА, которые описываются следующей системой уравнений:
vвх eсэп iвх Zсэп , iрек = ( vипВЫХ — eвс ) ^вс,
где v вх - входное напряжение НУ; e сэп - ЭДС СЭП; i вх - входной ток НУ; Z с эп - внутренний импеданс СЭП; i рек - ток рекуперации (выходной ток НУ); v ипВЫ х - выходное напряжение НУ; e вс - ЭДС внешней сети (сети, в которую производится рекуперация); Y вс - адмиттанс внешней сети.
Устройство управления в общем случае описывается нелинейными зависимостями напряжений управления НРЭ v упрНРЭ и ИП v упрИП от напряжения датчика входного напряжения v дн. В дальнейшем эти зависимости будут обозначены как f(K дн v вх) для НРЭ и g ( K дн v вх) для ИП, где K дн - коэффициент усиления датчика напряжения.
На основе функциональных связей, представленных на рис. 1, можно составить системы уравнений, описывающие отношения между токами и напряжениями в схемах.
Топология «а» описывается системой vупрНРЭ = f(Kдн vнрэ ) iнрэKдт1, vупрИП = g ( Kдн vнрэ ) iип Kдт2, i вх = i нрэ + гип,
где K дт1 и K дт2 - коэффициенты усиления датчиков тока ДТ1 и ДТ2; i нрэ и i ип - токи, протекающие через НРЭ и ИП соответственно.
Топология «б» описывается системой vупрНРЭ f(Kдн vнрэ ) iвх Kдг1, vупрИП g ( Kдн vнрэ ) iип Kдт2, iвх = iнрэ + iип .
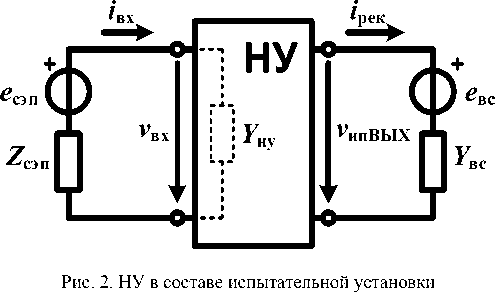
Fig. 2. E-load as part of a testing setup
Топология «в» описывается системой
УупрНРЭ f ( Kдн ^нрэ ) iвх Kдт1, УупрИП = ^ирэ Kдт2 g ( Kдн ^нрэ ), iвх ^нрэ + iun .
Топология «ж» описывается системой:
У упрНРЭ f ( K дн ^ нрэ ) i вх K дт , ^ упрИП = ^ нрэ K дн g ( K дн ^ нрэ ) ,
V = у + у .
вх нрэ ип .
На основе систем (1)–(5) были составлены функциональные схемы, представленные на рис. 3.
Описание блока НРЭ может быть получено как аналитическим путём (на основе системы уравнений, описывающих структуру и элементы НРЭ), так и путём идентификации опытного образца НРЭ (рис. 4). На рис. 4, а представлена внутренняя структура НРЭ на основе модели в двумя входами и одним выходом, в которой W ус1 ( s ) – передаточная функция (ПФ) корректирующего устройства (КУ) НРЭ; V п – напряжение смещения управляющего перехода; X 1 , U 1 = [ v нрэ v упр ] T , Y 1 = [ i нрэ ] – векторы состояния, управления и выхода НРЭ соответственно; A 1 , B 1 , C 1 , D 1 – матрицы коэффициентов идентифицированной модели НРЭ. Схема использованной в работе идентифицированной MISO-модели представлена на рис. 4, б .
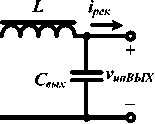
Идентификация модели ИП в составе блока ИП (рис. 5) сопряжена со сложностями, связанными с импульсным характером работы ИП (рис. 5, а ). В случаях, когда частота среза ИП значительно ниже его частоты переключения, ИП возможно представить в виде непрерывной линейной модели [18]. Ввиду того, что к ИП в составе НУ не предъявляются требования по быстродействию, использование непрерывной линейной модели ИП является обоснованным. Помимо MIMO-модели в состав блока ИП также входят W ус2 ( s ) – ПФ КУ ИП и K шим = 1/ V пил – коэффициент широтноимпульсной модуляции, где V пил – напряжение пилообразного сигнала ШИМ.
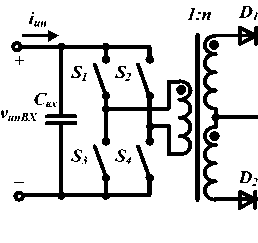
В качестве ИП возможно использовать любой импульсный регулятор, удовлетворяющий требованиям, предъявляемым к устройству. В частности, для защиты испытываемой аппаратуры к ИП предъявляется требование обеспечения гальванической развязки входных и выходных клемм, что может быть реализовано посредством мостовых преобразователей на основе повышающей и понижающей схем (рис. 5). В связи с тем, что на входе ИП необходимо поддерживать ток постоянной величины, на входе ИП необходимо расположить фильтр, который будет сглаживать пульсации по току (катушка индуктивности) или напряжению (конденсатор).
Стоит отметить, что в понижающей схеме (рис. 5, в , г ) при стабилизации входных токов большой величины значительными становятся импульсные токи, протекающие через входную ёмкость C вх . Эти токи могут привести к нагреву входного конденсатора и, как следствие, выходу из строя ИП. Таким образом, в параллельных топологиях «а»–«в» более предпочтительным является использование преобразователей на основе импульсных регуляторов повышающего типа (рис. 5, а , б ), которые описываются системой нелинейных уравнений:
т di ип
L"^
= V ипВХ V ипВЫХ (1 d),
n dvипВХ 2
i ип (1 u) i рек , dt n
где i ип – входной ток ИП; v ипВХ – входное напряжение ИП; v ипВЫХ – выходное напряжение ИП; d – коэффициент заполнения; i рек – выходной ток (ток рекуперации); n = N 2 / N 1 – коэффициент трансформации ( N 1 и N 2 – количество витков на первичной и вторичной обмотках соответственно); L – индуктивность дросселя; C – емкость конденсатора.
В последовательной топологии «ж» изменение величины входного тока НУ приводит к изменению величины падения напряжения на НРЭ, при этом скорость этого изменения значительно превышает ту скорость, которую способен скомпенсировать ИП, поскольку при наведении помех высокой частоты амплитуда тока ограничивается активными и индуктивными составляющими импеданса соединительных проводов и входного импеданса ИП. С целью увеличения амплитуды наводимых помех необходимо снизить значение входного импеданса ИП на высокой частоте, что можно достичь увеличением емкости входного конденсатора ИП.
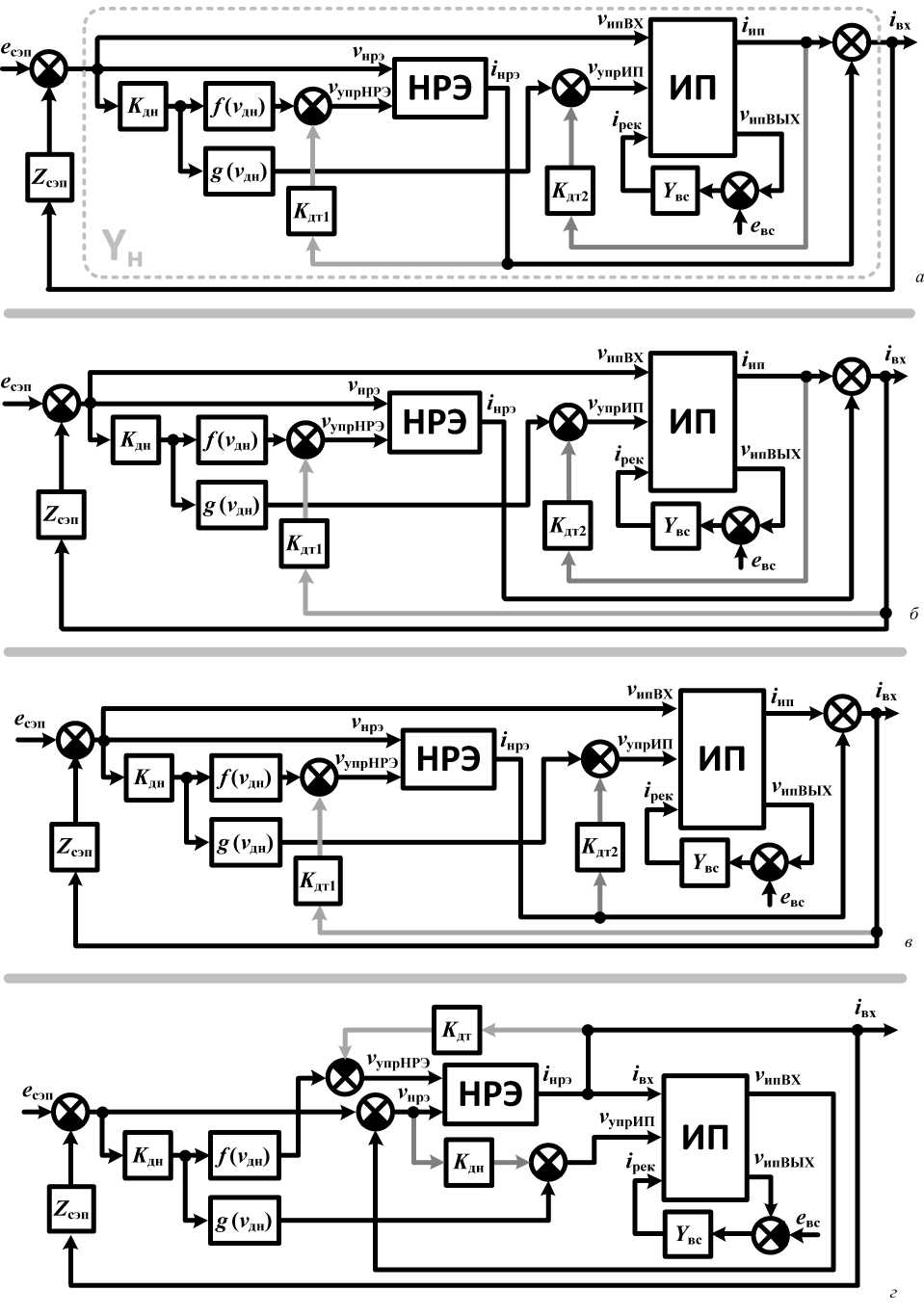
Рис. 3. Обобщенные функциональные схемы рассматриваемых топологий: а – схема топологии «а»; б – схема топологии «б»; в – схема топологии «в»; г – схема топологий «ж»
Fig. 3. Generalized block diagrams of considered topologies
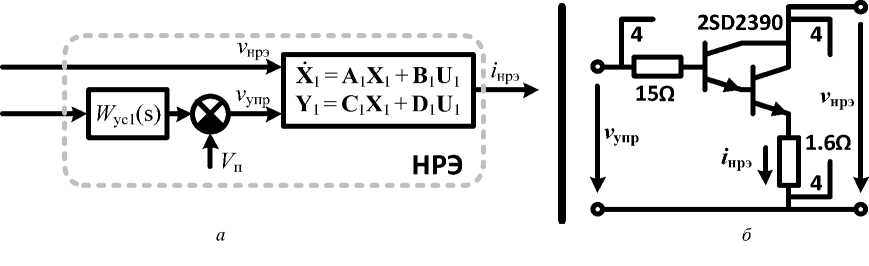
Рис. 4. Исследованная модель НРЭ: а – функциональная схема; б – электрическая схема
Fig. 4. Examined linear regulator model: a – block diagram, b – electrical circuit
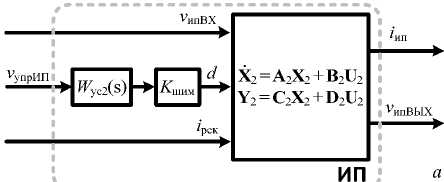
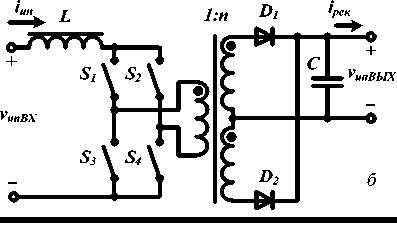
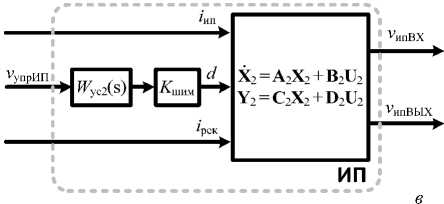
Рис. 5. Исследованные модели ИП: а – функциональная схема, б – электрическая схема мостового преобразователя повышающего типа; в , г – схема мостового преобразователя понижающего типа
г
Fig. 5. Examined switched-mode converter models: a – block diagram and b – circuit of boost-based full-bridge converter, c and d – of buck-based full-bridge converter
Таким образом, в последовательной топологии «ж» рекомендуется использовать мостовые преобразователи на основе импульсных регуляторов понижающего типа (рис. 5, в и г), которые описываются системой нелинейных уравнений dvипВХ вх dt
= i ип - 2 ■ n ■ i L ■ d ,
, diL .
-
< L ----= 2 ■ n ■ v.
dt
Г dV ипВЫХ
C вых T dt
’ипВХ ■ d v ипВЫХ ,
i L i рек ,
где C вх и C вых – емкости входного и выходного конденсатора; iL – ток дросселя.
Для дальнейшего исследования было разработано четыре НУ топологий «а»–«в» и «ж», каждое из которых удовлетворяет следующим требованиям:
-
– входной ток: 10 А;
-
– средняя мощность, рассеиваемая на НРЭ: 100 Вт;
-
– наибольшая погрешность стабилизации входного тока: 0,1 А;
-
– наибольший размах пульсаций по входному току: 0,1 А;
-
– полоса пропускания: не менее 100 кГц.
Адмиттансные частотные характеристики. Одним из условий для обеспечения устойчивости является выполнение неравенства Z сэп Y н< 1, где Z сэп – импеданс источника напряжения (СЭП), Y н = I вх/ V вх – входной адмиттанс источника тока (НУ) (см. рис. 3, а ) [19]. Для источника тока наилучшей является ситуация, при которой проводимость во всём диапазоне частот равна нулю.
Из графиков адмиттансных частотных характеристик (рис. 6) можно сделать вывод, что параллельные топологии «б» и «в» обладают приблизительно равным входным адмиттансом практически на всём диапазоне частот, в то время как топология «а» имеет в области низких частот на порядок большую величину адмиттанса. Топология «ж» обладает наилучшим с точки зрения источника тока адмиттансом, который на низких частотах составляет лишь десятые доли мкСм.
Наведение помех. Передаточные функции замкнутых контуров по управлению определяются как W ( s ) = I вх ( s )/ V оп ( s ) (рис. 7), при этом в схемах «а» и «б» V оп ( s ) является опорным напряжением обоих контуров НРЭ и ИП, в схемах «в» и «г» – только контура НРЭ.
В топологии «а» имеется спад, начинающийся в области 10 кГц, который обусловлен частотой среза ИП. В топологии «б», в отличие от топологии «в», отсутствует ярко выраженный резонансный пик, что позволяет наводить без искажений тестовые сигналы, имеющие более сложный гармонический состав.
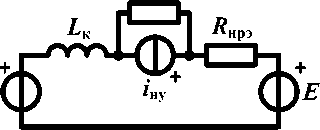
Несмотря на то, что в последовательной топологии «ж» полоса пропускания сравнима с полосой пропускания параллельных топологий «б» и «в», наведение пульсаций в топологии «ж» сопряжено с большими сложностями, чем в параллельных топологиях. Поскольку в последовательной схеме в качестве ИП рекомендовано использовать преобразователь с большой входной ёмкостью, в эквивалентной схеме (рис. 8) ИП может быть заменён источником постоянного напряжения Eип, подразумевая, что быстродействия ИП достаточно для поддержания напряжения НРЭ на требуемом уровне на низких частотах. Источник постоянного напряжения Eсэп замещает СЭП, индуктивность Lк замещает выходную индуктивность испытываемой СЭП и кабельную линию, соединяющую СЭП и НУ. Схема замещения НРЭ состоит из двух элементов: источник постоянного тока iну и активное сопротивление НРЭ Rнрэ.
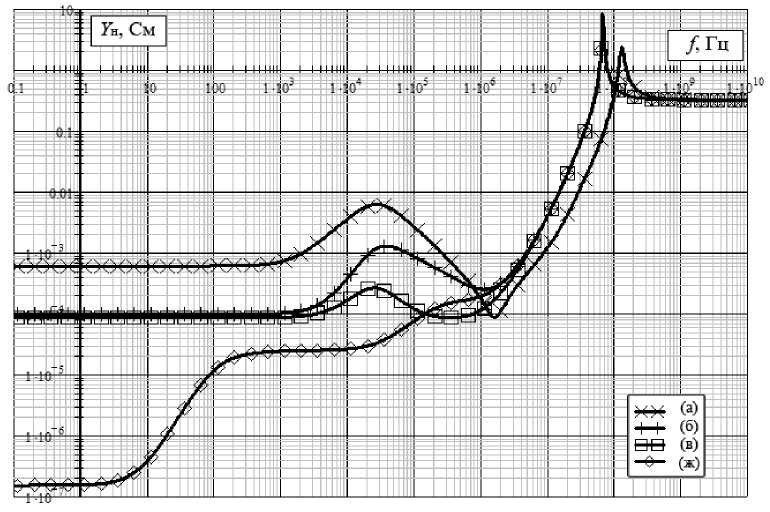
Рис. 6. Адмиттансные частотные характеристики рассматриваемых топологий
-
Fig. 6. Admittance response of examined topologies
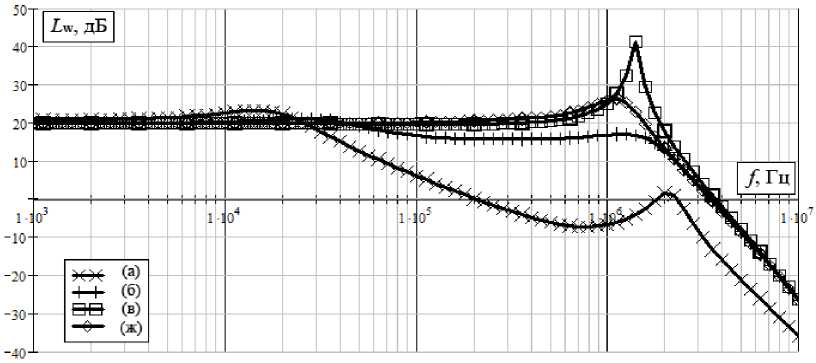
Рис. 7. Передаточные функции замкнутых контуров рассматриваемых топологий
-
Fig. 7. Closed loop transfer functions of examined topologies
R рэ
ип
Рис. 8. Эквивалентная схема НУ с испытываемым СЭП и кабельной линией
Fig. 8. Equivalent circuit of E-load with tested power supply system and cable line
При наведении пульсаций изменение тока через индуктивность Lк будет приводить к появлению напряжения на индуктивности vLк, мгновенное значение которого определяется как diну vL к = Lк -;- = Lк toIнав cos(to t), dt
где i ну = I ст + I навsin(ω t ) – общий мгновенный ток НУ; I ст – стабилизируемое значение тока; I нав – амплитуда наводимых пульсаций; ω – угловая частота наводимых пульсаций.
Поскольку и падение напряжения на активном сопротивлении НРЭ vRнрэ = iнуRнрэ, и падение напряжения на самом регулирующем элементе vрэ будут меняться с изменением величины протекающего через НРЭ тока, то для поддержания регулирующего элемента в проводящем состоянии необходимо, чтобы общее мгновенное падение напряжения на НРЭ vнрэ удовлетворяло условию min(vнрэ ) = UнрэСТ + min(vLк ) > vрэ + vRнрэ , (9)
где U нрэСТ – постоянное напряжение, стабилизируемое на НРЭ.
Наименьшему напряжению НРЭ v нрэ будет соответствовать момент времени, при котором cos(ω t ) = = -1 (sin(ω t ) = 0). Тогда с учётом уравнения (8) можно переписать условие (9) как
U нрэСТ — L к to I нав > v рэ + I ст R нрэ • (10)
Учитывая, что ω = 2πf, из неравенства (10) можно сформулировать условие, обеспечивающее отсутствие нелинейных искажений в наводимых с частотой f тестовых сигналах по входному току, обусловленных выходом регулирующего элемента из проводящего режима:
f <
U ~ v — I R нрэСТ рэ ст нрэ
2 П L к I Н ав
Приравняв обе части неравенства (11), можно также получить значение наибольшей частоты наводимых пульсаций fmax, при которой будут отсутствовать нелинейные искажения по форме входного тока. Из выражения (11) видно, что при увеличении индуктивности кабельной линии (и выходной индуктивности испытываемой СЭП) частота fmax уменьшается, в результате чего при использовании топологии «ж» появляется зависимость максимальной амплитуды наводимых помех от индуктивной составляющей импеданса СЭП и соединительных проводов. Кроме того , выражение (11) показывает, что индуктивность Lк влияет не только на максимальную частоту пульсаций fmax, но и на наибольшее значение амплитуды наводимых колебаний Iнав на каждой частоте. Таким образом, в последовательной топологии до некоторой частоты существует возможность наводить пульсации по входному току амплитудой, равной полной величине стабилизируемого через НУ тока, обеспечивая при этом рекуперацию большей части тока в питающую сеть, что недостижимо в параллельных топологиях.
Заключение. Полученные результаты позволяют сделать вывод относительно выбора той или иной топологии на основе требований, выдвигаемых к НУ. При повышенных требованиях к живучести использование топологий «а» и «б» является более целесообразным, поскольку в них возможно обеспечение продолжения работы в случаях, когда НРЭ оказывается в аварийном режиме. Топологии «а» и «б» также являются более простыми в проектировании и отработке, поскольку существует возможность независимого испытания НРЭ и ИП. При необходимости наведения пульсаций большой амплитуды с сохранением высокого показателя рекуперации, последовательная топология «ж» является наиболее подходящей. Однако для наведения помех в широком диапазоне частот лучшие результаты могут быть достигнуты с топологиями «б» и «в». Топологии «ж» присущи самые малые значения входного адмиттанса на низких частотах, к тому же топология «ж» более чувствительна к величине выходной индуктивности испытываемой СЭП. Однако в топологии «ж» посредством быстродействующего НРЭ происходит фильтрация стабилизируемого входного тока, что обеспечивает более низкий уровень пульсаций, чем в параллельных топологиях, при равных массогабаритных характеристиках.
Acknowledgements. This study was supported by the Ministry of Education and Science of the Russian Federation (Government Contract 14.577.21.0082, unique identifier RFMEFI57714X008) and JSC “Academician M. F. Reshetnev “Information Satellite Systems”.
Список литературы Исследование топологий нагрузочных устройств с двойным регулированием для испытаний систем электропитания космических аппаратов
- A high-flexibility DC load for fuel cell and solar arrays power sources based on DC-DC converters/E. Duran //Applied Energy Journal. 2011. Vol. 88. P. 1690-1702 DOI: 10.1016/j.apenergy.2010.11.002
- Locment F., Sechilariu M., Houssamo I. DC Load and Batteries Control Limitations for Photovoltaic Systems. Experimental Validation//IEEE Trans. on Power Electronics. 2012. Vol. 27(9). P. 4030-4038 DOI: 10.1109/TPEL.2012.2189134
- Ceylan M., Balikci A. Design and Implementation of an Electronic Constant Current DC Load for Battery Discharge and Power Supply Test Systems//16th Intern. Power Electronics and Motion Control Conf. and Exposition. 2014. P. 924-927 DOI: 10.1109/EPEPEMC.2014.6980625
- Locment F., Sechilariu M., Houssamo I. A Sliding-Mode Duty-Ratio Controller for DC/DC Buck Converters With Constant Power Loads//IEEE Trans. on Power Electronics. 2012. Vol. 27(9). P. 4030-4038 DOI: 10.1109/TPEL.2012.2189134
- Kakigano H., Miura Y., Ise T. Low-Voltage Bipolar-Type DC Microgrid for Super High Quality Distribution//IEEE Trans. on Power Electronics. 2010. Vol. 25(12). P. 3066-3075 DOI: 10.1109/TPEL.2010.2077682
- Design and Implementation of Power Electronic Load Used to Test Tidal Current Energy Generator Sets/S. Wang //IEEE International Conference on Fuzzy Systems (FUZZ-IEEE). 2014. P. 354-358 DOI: 10.1109/FUZZ-IEEE.2014.6891752
- Adjustable 20 kW full-SiC electronic load with energy recovery for medium-frequency inverter/F. Denk //PCIM Europe 2016; International Exhibition and Conference for Power Electronics, Intelligent Motion, Renewable Energy and Energy Management. 2016. P. 1721-1727.
- Bouaicha A., Allagui H., Mami A. Study of an electronic load for measuring the internal impedance of a PEM fuel cell//Systems, Signals & Devices (SSD): 10th Intern. Multi-Conference on. 2013. P. 1-5.
- Design and Analysis of a Digital Controller for Boost Converter with Renewable Energy Sources for Domestic DC Load/O. Ibrahim //Applied Mechanics and Materials. 2015. Vol. 785. P. 141-145 DOI: 10.4028/www.scientific.net/AMM.785.141
- Constant Current Control of DC Electronic Load based on Boost Topology/G. Hu //Electronika ir Elektrotechnika. 2014. Vol. 20(2). P. 36-39 DOI: 10.5755/j01.eee.20.2.6381
- Ying C. Design of 300A constant current electronic load//Selected Papers of the Photoelectronic Technology Committee Conferences. 2015. P. 1-7 DOI: 10.1117/12.2228515
- Research on Power Electronic Load: Topology, Modeling, and Control/X. She //Applied Power Electronics Conference and Exposition. APEC -2009: Twenty-Fourth Annual IEEE. 2009. P. 1661-1666 DOI: 10.1109/APEC.2009.4802891
- Tsang K. M., Chan W. L. Fast Acting Regenerative DC Electronic Load Based on a SEPIC Converter//IEEE Trans. on Power Electronics. 2012. Vol. 27(1). P. 269-275 DOI: 10.1109/TPEL.2011.2158446
- Upadhyay S., Mishra S., Joshi A. A Wide Bandwidth Electronic Load//IEEE Trans. on Industrial Electronics. 2012. Vol. 59(2). P. 733-739 DOI: 10.1109/TIE.2011.2148680
- Fedchenko A. S., Lobanov D. K., Mizrah E. A. Design Principles and Classification of the Adjustable Electronic Loads of Electrical Power Systems of Space-crafts//International Journal of Applied Engineering Research (IJAER). 2015. Vol. 10(20). P. 41004-41010.
- Лобанов Д. К., Федченко А. С., Мизрах Е. А. Моделирование нагрузочного устройства рекупера-ционного типа//Актуальные проблемы авиации и космонавтики. 2012. Вып. 8. С. 172-173.
- Мизрах Е. А., Лобанов Д. К. Динамический синтез нагрузочных устройств с рекуперацией электроэнергии в сеть электропитания испытательного комплекса энергосистем космического аппарата//Вестник СибГАУ. 2005. Вып. 4(12). С. 142-148.
- Мелешин В. И., Овчинников Д. А. Управление транзисторными преобразователями электроэнергии. М.: Техносфера, 2011. 576 с.
- Мизрах Е. А. Частотный метод динамического синтеза имитаторов первичных источников электро-энергии космических аппаратов//Вестник СибГАУ. 2005. Вып. 4(12). С. 56-59.
