Исследование устройств бесперебойного питания с параллельным соединением инверторов и равнозначным управлением

Автор: Осипов О.В., Гейтенко А.Е.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Технологии радиосвязи, радиовещания и телевидения
Статья в выпуске: 4 т.17, 2019 года.
Бесплатный доступ
Электропитание телекоммуникационных систем осуществляется посредством резервируемых установок, среди которых важнейшее положение занимают инверторы и источники бесперебойного питания. Преобразователи на основе параллельно соединенных широтно-импульсных инверторов позволяют осуществить резервирование без коммутации. Для моделирования и исследований преобразователей на основе широтно-импульсных инверторов с равнозначным управлением предлагается дискретно-нелинейная модель, обладающая более высокой адекватностью в сравнении с линеаризованной. Модель позволяет повысить достоверность результатов исследований и расширить число исследуемых характеристик преобразователя. Среди важнейших результатов моделирования следует выделить влияние фазовых задержек задающего сигнала инверторов, которые приводят к неравномерному распределению их выходных токов. При этом увеличивается реактивная мощность, генерируемая инверторами, и уменьшается их энергетическая эффективность. Для снижения влияния такого внешнего воздействия предлагается увеличить обратную связь по разностному сигналу среднего значения тока инверторов и действительным значением тока каждого инвертора. Глубина обратной связи определяется допустимым для практики уровнем реактивной мощности в инверторах.
Телекоммуникации, резервирование, коэффициент готовности, преобразователь напряжения, широтно-импульсная модуляция, параллельное соединение инверторов, дискретно-нелинейная модель, многоконтурная обратная связь, переменные состояния, задержка фазы
Короткий адрес: https://sciup.org/140255724
IDR: 140255724 | УДК: 621. | DOI: 10.18469/ikt.2019.17.4.09
The research of uninterruptible power supplies with parallel connection of inverters and equivalent control
Telecommunication systems are powered by redundant plants, among which inverters and uninterruptible power supplies occupy the most important position. Converters based on parallelconnected pulse-width inverters allow redundancy without switching. For modeling and research of converters based on pulse-width inverters with equivalent control, a discrete-nonlinear model is proposed that has a higher adequacy in comparison with the linearized one. The model allows increasing the reliability of research results and expanding the number of investigated characteristics of the converter. Among the most important simulation results, it is necessary to highlight the influence of phase delays of the driving signal from the inverters, which lead to an uneven distribution of output currents of the inverters. Thereat the reactive power generated by inverters increases, and their energy efficiency decreases. To reduce the influence of such external action, it is proposed to increase feedback on the difference signal of the average current value of inverters and the actual current value of each inverter. Feedback depth is determined by the level of reactive power acceptable in inverters in practice.
Текст научной статьи Исследование устройств бесперебойного питания с параллельным соединением инверторов и равнозначным управлением
Электропитание оборудования телекоммуникаций, в том числе систем и устройств телевидения, должно обладать высокими показателями надежности, которые достигаются применением источников бесперебойного питания переменного тока и инверторов [1]. Модульное исполнение устройств бесперебойного питания и параллельное соединение модулей позволяет осуществить резервирование без коммутаций и повысить надежность систем бесперебойного питания, которое можно оценить с помощью коэффициента готовности для обслуживаемых систем. Повышение коэффициента готовности осуществляется путем сокращения времени восстановления. Одновременно модульное исполнение устройств электропитания позволяет добиться нового качества - масштабирования, которое дает возможность путем подбора числа параллельных устройств получить необходимую мощность системы и степень ее резервирования.
Уравнения состояния инвертора
Для электропитания оборудования радиотехнических и телевизионных систем целесообразно применение устройств бесперебойного питания на основе преобразователей с параллельно соединенными инверторами и «равнозначным»
принципом управления, в котором выравнивание выходных токов модулей осуществляется по их среднему значению на высокой несущей частоте преобразования [2]. Равенство выходных токов является обязательным условием функционирования параллельно соединенных инверторов — преобразователей напряжения. Формирование напряжения квазисинусоидальной формы осуществляется путем широтно-импульсной модуляции второго рода на несущей частоте, значительно превышающей частоту огибающей.
На рисунке 1 приведена функциональная схема преобразователя на основе параллельно соединенных широтно-импульсных (ШИ) инверторов с равнозначным управлением.
Преобразователь содержит несколько параллельно включенных выходами и входами идентичных инверторов напряжения (инвертор 1 — инвертор 1ST). Входные, задающие напряжения инверторов, равны: иВх1 = иЪуЛ =... = uBxN. Силовая часть инверторов построена по мостовой схеме и состоит из четырех транзисторных ключей на основе полевых транзисторов и диодов рекуперации. Управление ключами осуществляется с помощью ШИ-модулятора в составе блока управления инвертора.
Обязательным узлом параллельно соединяемых инверторов (стабилизированных преоб-
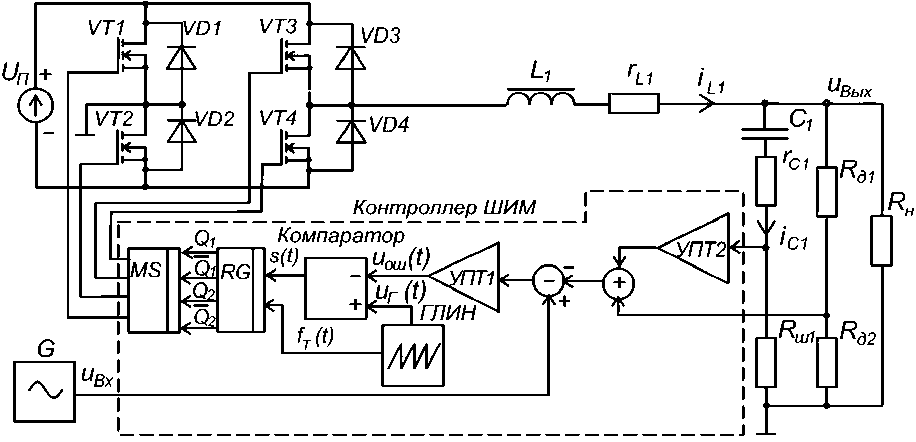
Рисунок 2. Широтно-импульсный инвертор
разователей напряжения) является система выравнивания выходных токов. С помощью такой системы (блок) is = \ilt /N осуществляется суммирование выходных токов in всех инверторов и деление на число N инверторов. Измерение токов производится с помощью соответствующих датчиков тока ДТ1 -ДТМ.
В каждом инверторе осуществляется сравнение собственного выходного тока гп и среднего значения is, которое является задающим по току сигналом управления. Разностный сигнал is — iH увеличивается, фильтруется (//,) с целью подавления высокочастотных помех и подается на вход инвертора.
Исследования ШИ-преобразователя с равнозначным управлением можно проводить посредством линеаризации его передаточной функции [3; 4]. Для этого используется метод фазовых переменных по усредненным параметрам преобразователя. Даже при значительных упрощениях основные соотношения для выходного напряжения пВых и выходных токов in оказываются весьма сложными для анализа.
Метод усреднения и линеаризации является приближенным методом. Линеаризация передаточной функции преобразователя не позволяет осуществить учет нелинейности ШИ-модуляции, исследование импульсных внешних деструктивных воздействий, а также отклонений внутренних параметров инверторов [3]. С целью повышения достоверности результатов исследований разработана дискретно-нелинейная модель преобразователя, обладающая более высокой адекватностью и одновременно расширяющая число исследуемых параметров. Основой преобразователя можно считать ШИ-инвертор с многоконтурной обратной связью. Структурная схема инвертора приведена на рисунке 2.
В схеме приняты следующие обозначения: MS - мультиплексор; RG - регистр; G - генератор задающего сигнала (синусоидального); ГЛИН — генератор линейно изменяющегося напряжения ит с периодом 7^; УНТ — усилитель постоянного тока; мВхД), z/Bblx(0 - входное (задающее) и выходное напряжения широтно-импульсного инвертора напряжения соответственно; гп, гГ1 — сопротивления потерь в элементах фильтра Lv С,; 7?Д1, Rp? - делитель напряжения с коэффициентом передачи а= Rp2/(R№ + /?Д2) для обеспечения обратной связи по выходному напряжению; иОш(0 - сигнал ошибки, равный разности задающего напряжения и суммарного напряжения обратной связи; s(f) — выходной сигнал компаратора (0; 1); JT — сигнал сброса импульсов ШИ-модулятора; 7?Ш1 — сопротивление шунта для обеспечения обратной связи по току конденсатора фильтра СР Переменные состояния силовой части инвертора: ток в индуктивности хх = in и напряжение на емкости хэ = исх для случая индуктивно-емкостного фильтра с учетом потерь описываются матричными уравнениями и составляются на основании законов Кирхгофа для напряжений и токов.
Переменные состояния на интервале проводимости ключей VT3, VT2 (диагонали инвертора) определяются уравнением x = Alx + Blu, (1) на интервале выключенного (закрытого) состояния ключей уравнением х = А2х + В2и. (2)
Матрицы коэффициентов переменных состояния А] и А, и матрицы коэффициентов вынужденного (внешнего) воздействия В, и В2 для инвертора с однозвенным фильтром имеют вид:
At А2
--(г£, +--5-У-
А RH+rCY
RH
^i(Rh + ?|)
Rh Ц^Н + rcd 1 C^Rr + rci)
B> =
A
Приведенные выражения (l)-(3) для матричных коэффициентов А,, А2, В] и В2 соответствуют режиму непрерывного (или безразрывно-го) тока индуктивности инвертора.
В переходных режимах (при запуске инвертора, резком уменьшении тока нагрузки), учет особенностей режима прерывистого тока индуктивности силовая часть инвертора характеризуется матричными коэффициентами А3, В3:
На компаратор системы управления инвертора подаются два сигнала: сигнал ошибки иОш(/) и сигнал пилообразного напряжения ит^.
В зависимости от их соотношения для положительных значений сигнала ошибки мОш (?) > О на выходе компаратора формируются сигналы управления s^ генерированием импульсов положительного, а для иОш ^ < 0 отрицательного напряжения му] У2 = 0; 1:
5(0 = ыОш(0-[+М01 =
— ^у^Вх _ [^^У^Вых (О "*" (5)
где ку — коэффициент усиления усилителя напряжения постоянного тока в цепи обратной связи; к, — коэффициент усиления усилителя постоянного тока в цепи обратной связи; tmodr— остаток от деления длительности импульса на период модуляции tttjTT; Urmax- размах линейно изменяющегося напряжения.
Уравнения (1)-(5) представляют собой дискретно-нелинейные уравнения модели инвертора с использованием метода переменных состояния по мгновенным значениям параметров. При применении этого метода переменных состояния на каждом шаге вычислений определяется сигнал л(?) и в зависимости от его значения решаются уравнения состояния либо для цепи с открытым ключом, либо для цепи с закрытым ключом.
Дискретно-нелинейная модель преобразователя
С помощью программного модуля SimPower-Systems интерактивной среды Simulink построена дискретно-нелинейная модель преобразователя на основе параллельно соединенных инверторов с равнозначным управлением [5] (см. рисунок 3).
Задающий сигнал напряжения преобразователя поступает на вход In 1 каждого из широтноимпульсных инверторов InvPWMl, InvPWM2 и InvPWM3. Общий выход инверторов подключен к блоку Load нагрузок (индуктивной, емкостной, нелинейной и других). В каждом инверторе имеется главная обратная связь по напряжению (цепь ULoad). Одновременно в инверторах содержится цепь отрицательной обратной связи по току емкости выходного фильтра (Ic 1 в первом инверторе и так далее). В преобразователе используется генератор BSG пилообразного сигнала несущей частоты (3 кГц) и генератор Gen задающего (в данном случае синусоидального) сигнала.
Для выравнивания выходных токов инверторов (ШИ-преобразователей напряжения, соединенных параллельно) используется схема, которая включает отрицательную обратную связь по току, равному разности между задающим средним значением выходного тока 7, и действительным значением тока инвертора (для первого инвертора II). Таким образом, сигнал idn обратной связи по разностному току и-го инвертора равен где in — выходной ток и-го инвертора; N — число инверторов в преобразователе.
В преобразователе применяются блоки задержек Delay для моделирования деструктивных возмущений типа «фазовых отклонений» управляющих сигналов. Кривые напряжений и токов в различных точках преобразователя выводятся с помощью блоков согласования VID1 и VID2 на осциллограф Scope.
Вместе с этим на схеме не показаны измерительные устройства действующих значений выходного напряжения и токов инверторов, его коэффициента нелинейных искажений и спектра, измерители активной и реактивной мощности и сервисные устройства (генераторы, таймеры, коммутаторы), используемые для моделирования и исследования различных режимов работы преобразователя.
Методика моделирования и исследований преобразователя посредством дискретно-нели-
Gen
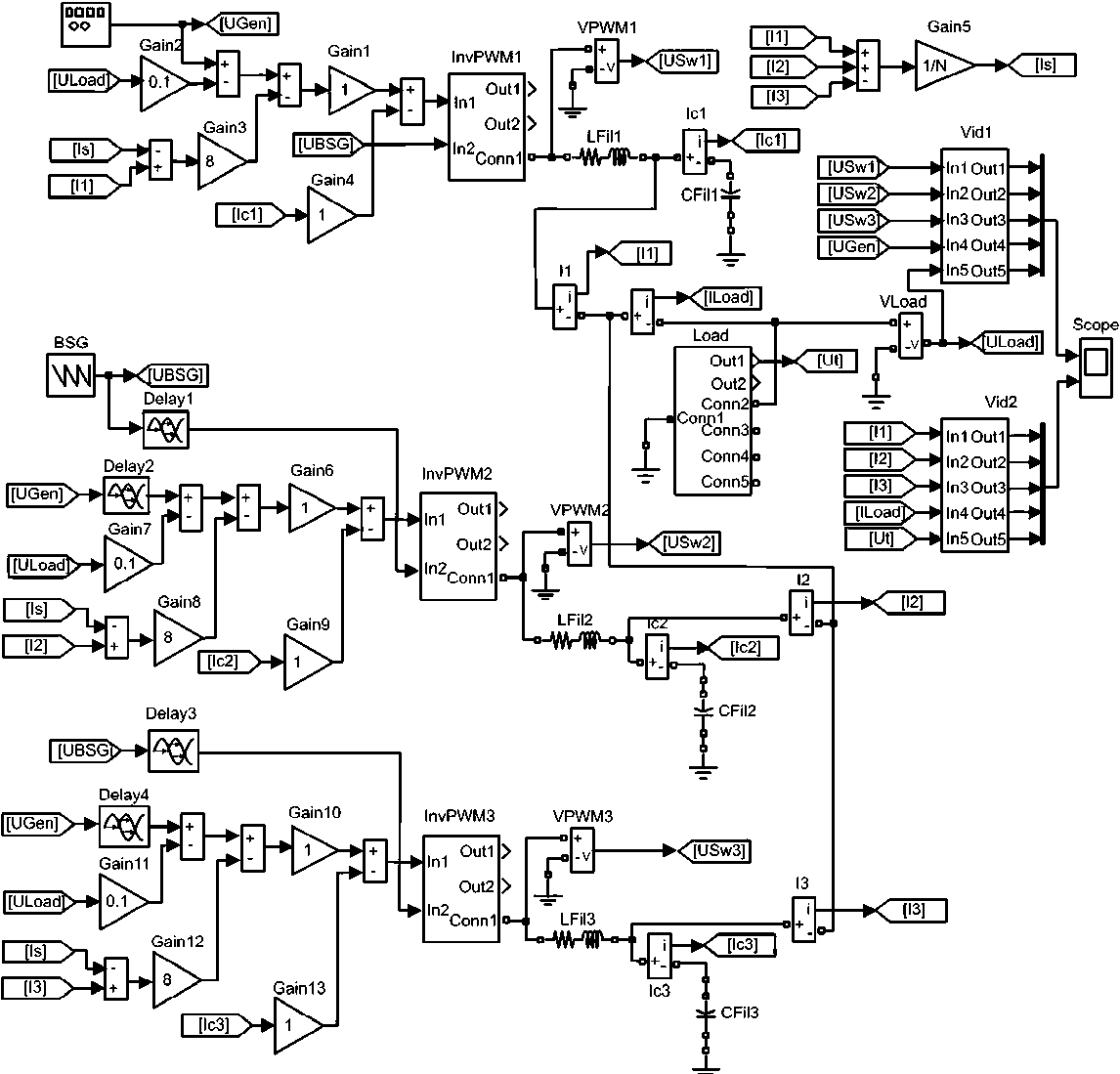
Рисунок 3. Структурная схема дискретно-нелинейной модели преобразователя с равнозначным принципом управления
нейных моделей включает три основные группы исследований [6; 7]
-
— исследование динамических свойств;
-
— исследование устойчивости к деструктивным внешним воздействиям;
-
— исследование устойчивости к отклонениям внутренних параметров преобразователей.
Для исследований и выявления основных свойств и закономерностей функционирования преобразователей равнозначного типа достаточно использовать модель на основе трех параллельно включенных идентичных широтно-импульсных инверторов [5; 6].
В качестве исследуемого объекта использовался преобразователь с параметрами, приведенны-
Таблица. Основные параметры преобразователя
|
Наименование параметра преобразователя |
Значение параметра |
|
Частота модуляции, /г, Гц |
3000 |
|
Индуктивность дросселя фильтра L1, Гн |
0,075 |
|
Емкость фильтра С1, мкФ |
10 |
|
Коэффициент передачи по напряжению прямого тракта инвертора А:,т |
1350 |
|
Коэффициент передачи ОС по напряжению kv |
0,1 |
|
Коэффициент петлевого усиления по напряжению инвертора кп. |
135 |
|
Коэффициент передачи ОС по току конденсатора фильтра инвертора кс |
1 |
|
Коэффициент передачи цепи обратной связи по разностному току инвертора к,. |
8 |
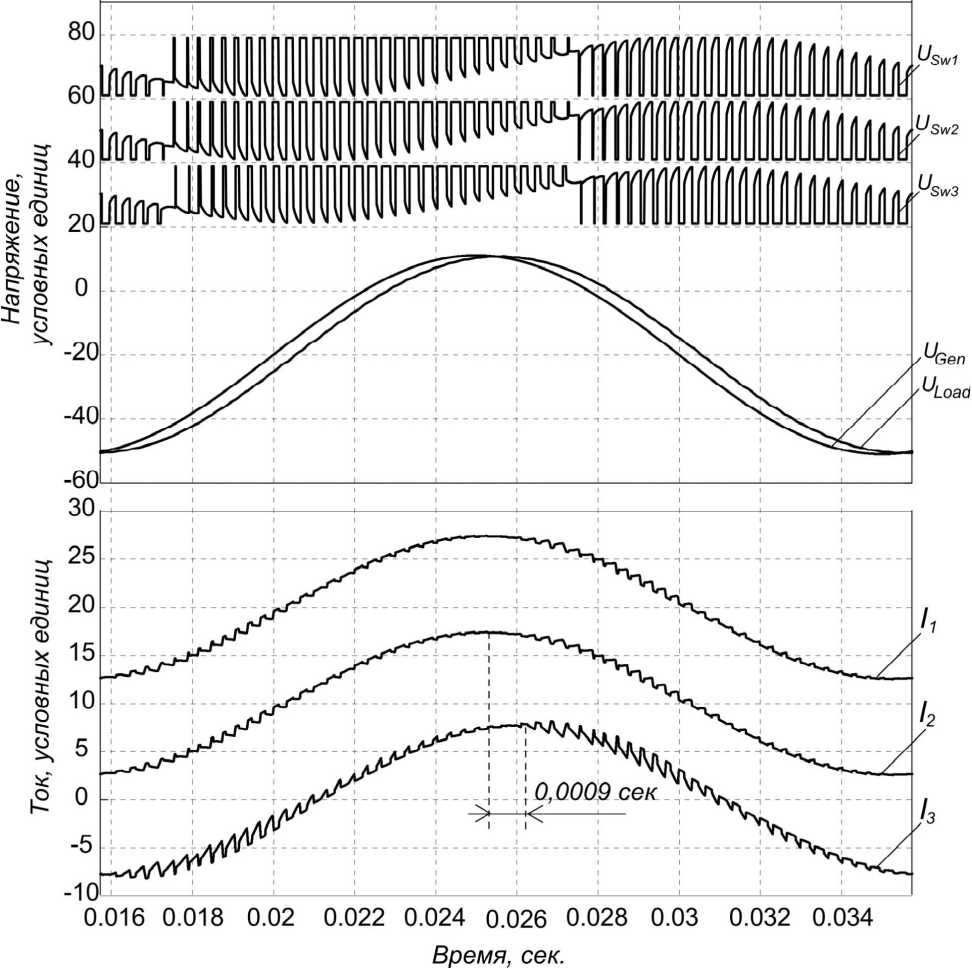
Рисунок 4. Диаграммы выходных токов инверторов преобразователя с равнозначным управлением при задержке задающего сигнала третьего инвертора
ми в таблице. Анализ результатов исследований показал, что наибольшую чувствительность выходные характеристики преобразователя имеют по отношению к фазовым отклонениям выходного тока соединенных параллельно инверторов [8]. При этом существенное значение в снижении влияния фазовых отклонений на энергетическую эффективность преобразователя имеет глубина обратной связи по разностному току Is — 1п.
На рисунке 4 показаны диаграммы выходных токов инверторов преобразователя с равнозначным управлением при задержке задающего сигнала третьего инвертора т3 =0,2 мс (1 % от периода огибающей Тм = 20 мс). Здесь USwX, USw2 и USw3 — выходные напряжения инверторов; UGen - задающее напряжение; ULoad - напряжение нагрузки; /1; Д и /3 — выходные токи инверторов.
Задержка фазы выходного тока третьего инвертора существенно превышает величину задержки управляющего сигнала и составляет т3; =0,9 мс (4,5 % от периода огибающей Тм\ В силу параллельного соединения инверторов задержка выходного напряжения увеличивается в меньшей степени (в данном случае до т3„ = 0,6 мс).
При этом реактивная мощность, вносимая третьим инвертором увеличивается и компенсируется реактивной мощностью остальных инверторов (см. рисунок 4). При уменьшении величины нагрузки указанное превышение задержки возрастает, поэтому на рисунке 4 показаны выходные процессы для резистивной нагрузки /Д =100 Ом (выходная мощность преобразователя Д[р =432 Вт). Увеличение коэффициента передачи обратной связи по разностному току значительно снижает сдвиг фазы выходного тока третьего инвертора
Заключение
Для построения сложного преобразователя на основе параллельно соединенных ШИ-инверторов необходимы подробные исследования на основе дискретно-нелинейных моделей высокой адекватности. Параллельное соединение стабилизированных инверторов — непростая задача. Поэтому результаты таких исследований позволяют выделить часто неочевидные особенности таких преобразователей и учесть их на этапе разработок. По результатам исследований разработан и запатентован новый способ управления [9].
Список литературы Исследование устройств бесперебойного питания с параллельным соединением инверторов и равнозначным управлением
- ОСТ 45.183-2001 Установки электропитания аппаратуры связи стационарные. Общие технические требования. М.: ЦНТИ "Информсвязь", 2001. 28 с.
- Sun X., Lee Y.-S., Xu D. Modeling, analysis, and implementation of parallel multi-inverter systems with instantaneous average-currentsharing scheme // IEEE Transactions on Power Electronics. 2003. Vol. 18. № 3. P. 844-856. DOI: 10.1109/TPEL.2003.810867
- Анализ однофазного инвертора напряжения с синусоидальной ШИМ при работе на линейную и нелинейную нагрузки / В.Ф. Дмитриков [и др.] // Труды учебных заведений связи. 2005. № 172. С. 168-179.
- Дмитриков В.Ф., Самылин И.Н., Шушпанов Д.В. Инвертор промышленной частоты, работающий на нелинейную нагрузку // Практическая силовая электроника. 2005. Вып. 20. С. 33-34.
- Осипов О.В., Гейтенко А.Е. Математические модели преобразователей напряжения централизованного и демократического типов // XV НТК "Физика и технические приложения волновых процессов": тез. докл. Казань, 2017. Т. 4. С. 287.
- Гейтенко А.Е. Анализ динамических свойств системы параллельно соединенных источников бесперебойного питания // Техника и технология. 2012. № 5 (52). С. 18-25.
- Осипов О.В., Гейтенко А.Е., Гейтенко Е.Н. Исследование энергетических характеристик параллельных массивов бесперебойного питания при отклонениях параметров отдельных инверторов // ВНТК "Электропитание-2013": тез. докл. Самара, 2013. С. 3.
- Гейтенко А.Е., Гейтенко Е.Н. Выходные характеристики параллельной системы бесперебойного питания равнозначного типа // XIII МНТК "Физика и технические приложения волновых процессов": тез. докл. Казань, 2015. С. 234-235.
- Патент РФ 2658621. Способ управления резервированными модулями источника бесперебойного питания / Гейтенко А.Е., Гейтенко Е.Н. Oпубл. 22.06.2018. БИ №18.
