Исследование влияния квантования по времени на частотные характеристики цифровой релейной электромеханической системы управления вектором тяги жидкостного ракетного двигателя

Автор: Белоногов Олег Борисович, Ронжин Иван Владимирович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Тепловые, электроракетные двигатели и энергоустановки летательных аппаратов
Статья в выпуске: 2 (49), 2025 года.
Бесплатный доступ
Статья содержит результаты исследования влияния квантования по бремени на частотные характеристики цифровой релейной электромеханической системы управления вектором тяги жидкостного ракетного двигателя пилотируемого транспортного корабля. В статье приведены результаты разработки математической модели квантования по бремени сигналов системы управления вектором тяги, а также апробации математической модели воздействия квантования по бремени путём расчётов частотных характеристик рулевого тракта системы. В основу проводимых исследований были положены математическая модель магнитоэлектрического двигателя, математическая модель двухприводной электромеханической рулевой машины, нелинейная математическая модель динамики цифровой релейной электромеханической системы управления вектором тяги жидкостного ракетного двигателя, многоканальный моногармонический метод «автоинтегрирования» для расчёта амплитудно-фазовых частотных характеристик цифровой релейной электромеханической системы управления вектором тяги жидкостного ракетного двигателя и численный метод решения систем нелинейных дифференциальных уравнений Рунге-Кутты 4-го порядка. В результате проведённых исследований установлено, что квантование по времени оказывает существенное влияние на частотные характеристики рулевых трактов системы управления вектором тяги жидкостного ракетного двигателя. Если отличия в фазовых частотных характеристиках начинаются практически сразу после первой частоты из массива частот входного моногармонического сигнала, то отличия в амплитудно-частотных и логарифмических амплитудно-частотных характеристиках начинаются приблизительно с частоты 3 Гц, что объясняется следствием теоремы Найквиста-Шеннона-Котельникова, согласно которой для сигнала, представленного последовательностью дискретных отсчётов, точное восстановление возможно, если частота дискретизации более чем в два раза выше частоты в спектре сигнала.
Квантование по времени, цифровая релейная электромеханическая система управления, частотные характеристики
Короткий адрес: https://sciup.org/143184753
IDR: 143184753 | УДК: 519.728.2:621.45.054
Studying effects of time quantization on frequency response of a digital relay-operated electromechanical system for controlling thrust vector of a liquid-propellant rocket engine
The paper contains results from a study of effects of time quantization on frequency response of a digital relay-operated electromechanical system for controlling thrust vector of a liquid-propellant rocket engine for a crew transportation spacecraft. The paper presents results from a development effort on a math model for time quantization of signals in a thrust vector control system, as well as from an evaluation of the math model of time quantization effects through calculations of frequency response for the steering channel of the system. The study is based on: a math model of a magnetoelectric motor, a math model of a dual-drive electromechanical actuator, non-linear math model for dynamics of the digital relay-operated electromechanical system for controlling liquid engine thrust vector, multi-channel monoharmonic autointegration method for calculating amplitude-phase-frequency characteristics of the digital relay-operated electromechanical system for controlling liquid engine thrust vector and a method for numerical solution of systems of Runge-Kutta fourth-order non-linear differential equations. The study found that time quantization has a significant effect on frequency response of steering channels in the control system for liquid engine thrust vector. While discrepancies in phase frequency characteristics start virtually immediately after the first frequency in the frequency array of the input monoharmonic signal, discrepancies in amplitude-frequency and logarithmic amplitude-frequency characteristics start around 3 Hz, which follows from the Nyquist-Shannon-Kotelnikov theorem stating that it is possible to perfectly reconstruct a signal represented by a series of digital samples, if the sampling rate is more than twice as high as the frequency in the signal spectrum.
Текст научной статьи Исследование влияния квантования по времени на частотные характеристики цифровой релейной электромеханической системы управления вектором тяги жидкостного ракетного двигателя
В системах управления движением пилотируемых космических кораблей особое место занимают специальные подсистемы, отвечающие за управление угловым положением камер сгорания маршевых жидкостных ракетных двигателей (ЖРД) этих изделий в плоскостях стабилизации [1]. Каждая из таких подсистем, получивших название «система управления вектором тяги» (СУВТ), включает в себя, как правило, два канала управления, или рулевых тракта (РТ) [1], один из которых управляет углом поворота камеры ЖРД в плоскости тангажа, а второй — в плоскости рыскания. Конструктивно-функциональная схема такой СУВТ представлена на рис. 1.
Каждый из РТ состоит из автономного вычислительного устройства (АВУ), усилительно-преобразу-ющего устройства (УПУ), электромеханической рулевой машины (РМ) и линий передачи сигналов. Каждая РМ управляет углом поворота камеры ЖРД, установленной в карданном подвесе на раме, посредством шарнирно-рычажного механизма.
Формирователем командного кода (ФКК) СУВТ ЖРД является бортовая цифровая вычислительная машина (БЦВМ). Посредством цифровой логики БЦВМ выдаёт заданные команды управления углом поворота камеры ЖРД в виде семиразрядного двоичного кода δ 1, подаваемого в АВУ.
В современных системах управления движением летательных аппаратов поставщиком командного сигнала РТ СУВТ является БЦВМ, работающая со своим тактом квантования по времени [3], который при сложной многофункциональной системе управления может быть достаточно длительным. Для получения высокой точности позиционирования системы, функции управления и цифровой коррекции сигналов осуществляет, как правило, АВУ, работающее с собственным, значительно меньшим, тактом квантования по времени, независимо по отношению к БЦВМ, что делает дискретную систему подобной аналоговой системе, в которой сравнение сигналов происходит непрерывно [3].
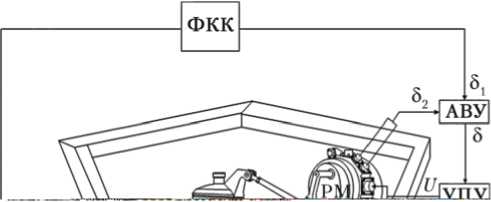
Рис. 1. Конструкционно-функциональная схема СУВТ: ЖРД — жидкостный ракетный двигатель; РМ — рулевая машина; АВУ — автономное вычислительное устройство; УПУ — усилительно-преобразующее устройство; ФКК — формирователь командных кодов; δ — код рассогласования; δ 1 — командный код; δ 2 — код обратной связи; U — напряжение постоянного тока, подаваемое на РМ [2]
Для рационального выбора алгоритма управления цифровой релейной электромеханической СУВТ необходимо разработать математическую модель воздействия указанного фактора.
Постановка задач исследований
В настоящей работе ставятся следующие задачи:
-
• разработка математической модели квантования по времени сигналов СУВТ;
-
• апробация математической модели воздействия путём расчётов частотных характеристик РТ СУВТ.
В основу проводимых исследований были положены:
-
• математическая модель магнитоэлектрического двигателя [4];
-
• математическая модель двухприводной электромеханической РМ [5];
-
• нелинейная математическая модель динамики цифровой релейной электромеханической СУВТ ЖРД [2];
-
• многоканальный моногармонический метод автоинтегрирования для расчёта амплитудно-фазовых частотных характеристик (АФЧХ) цифровой релейной электромеханической СУВТ ЖРД [6];
-
• численный метод решения систем нелинейных дифференциальных уравнений Рунге–Кутты 4-го порядка [7].
Математическая модель квантования по времени
Процесс квантования непрерывного сигнала по времени иллюстрируется рис. 2.
В цифровой релейной электромеханической системе квантованию по времени подвергается только значение кода командного сигнала δ 1, а код текущего положения вала РМ δ 2 (код обратной связи) благодаря работе АВУ изменяется непрерывно. В то же время необходимо отметить, что коды δ 1 и δ 2 являются продуктами квантования непрерывных сигналов по уровню, поэтому в такой системе осуществляется смешанное квантование по уровню и времени.
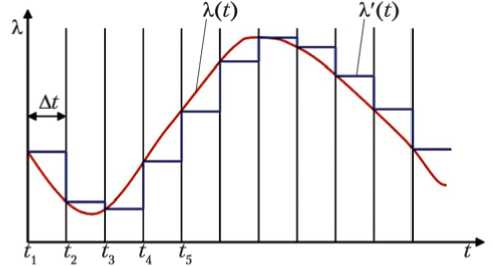
Рис. 2. Процесс квантования по времени t непрерывного сигнала λ : Δt — шаг квантования по времени; λ (t) — сигнал на входе в квантующее устройство; λ′ (t) — сигнал на выходе из квантующего устройства; t1…t5 — моменты времени, в которых осуществляется квантование (рисунок создан авторами)
В математическую модель РТ цифровой релейной электромеханической СУВТ ЖРД [2] для осуществления процесса квантования кода δ 1, в соответствии с разработанной математической моделью указанного воздействия, был введён специальный программный фрагмент, осуществляющий этот процесс.
Для этого в программу были введены следующие переменные: Δ t — шаг квантования по времени; t * — текущее значение времени квантования; δ 1 ″ — промежуточное значение кода командного сигнала; δ 1 ′ — выходное значение кода командного сигнала.
В начальный момент времени t , когда t ≤ h , где h — шаг интегрирования дифференциальных уравнений математической модели РТ СУВТ по времени, осуществляется присвоение переменным следующих начальных значений:
t * = 0; δ 1 ′ = δ 1; δ 1 ″ = δ 1.
При квантовании по времени обновление выходного кода командного сигнала δ 1 ′ осуществляется по окончании очередного шага квантования Δ t в локальном цикле с меткой М .
Цикл начинается после оператора вычисления кода командного сигнала δ 1.
М : t * = t *+ h ;
если t *≤ Δ t , то δ 1 ′ = δ 1 ″ ;
если t *>Δ t , то δ 1 ′ = δ 1; δ 1 ″ = δ 1; t * = 0;
переход к метке М .
Поскольку переходные характеристики РТ СУВТ ЖРД рассчитываются при ступенчатых входных воздействиях, изменения командного кода в цифровой релейной системе также происходят ступенчато. Поэтому квантование по времени не влияет на переходные характеристики СУВТ.
Результаты вычислительных экспериментов
Логарифмические амплитудно-фазовые частотные характеристики (ЛАФЧХ) РТ СУВТ рассчитывались для следующего ряда фиксированных частот f (Гц): 0,10; 0,13; 0,20; 0,23; …; 0,90; 0,93; 1,00; 1,30; 2,00; 2,30; …; 9,00; 9,30; 10,00.
Расчёты проводились с принятой погрешностью вычислений ε = 0,01% и шагом квантования по времени Δ t = 100 мс.
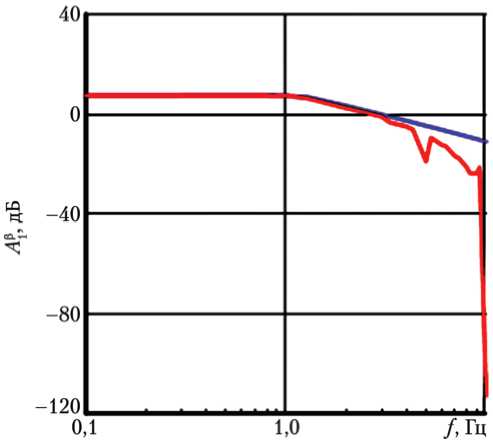
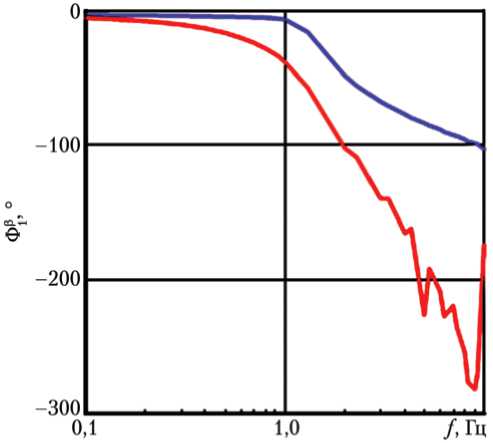
Результаты вычислительных экспериментов по определению ЛАФЧХ первой гармоники выходного периодического сигнала угла поворота камеры ЖРД, рассчитанные моногармоническим методом «автоинтегрирования» [6], представлены на рис. 3.
Из рассмотрения графиков, представленных на рис. 3, видно, что квантование по времени оказывает существенное влияние на частотные характеристики РТ СУВТ ЖРД. Если отличия в фазово-частотных характеристиках (ФЧХ) начинаются практически сразу после первой частоты из массива частот входного моно-гармонического сигнала, то отличия в амплитудно-частотных (АЧХ) и логарифмических амплитудно-частотых характеристиках (ЛАЧХ) начинаются приблизительно с частоты 3 Гц, что объясняется следствием теоремы Найквиста– Шеннона–Котельникова. Согласно этой теореме, для сигнала, представленного последовательностью дискретных отсчётов, точное восстановление возможно, если частота дискретизации более чем в два раза выше частоты в спектре сигнала [8–11]. Таким образом, в связи с большими искажениями проводить расчёты АФЧХ и ЛАФЧХ при квантовании по времени данной цифровой релейной электромеханической СУВТ ЖРД на частотах свыше 3 Гц нецелесообразно.
а)
б)
Рис. 3. Логарифмические амплитудно-частотные (а) и фазово-частотные (б) характеристики первой гармоники угла поворота камеры жидкостного ракетного двигателя (ЖРД): A 1 β — логарифм амплитуды первой гармоники угла поворота камеры ЖРД; Φ 1 β — фазовый сдвиг первой гармоники угла поворота камеры ЖРД; f — частота; ^“ — расчёт без квантования по времени; ^“ — расчёт с квантованием по времени (рисунки созданы авторами)
Выводы
В итоге проведённых исследований получены следующие основные результаты:
-
• разработана математическая модель и программная реализация квантования по времени для цифровой релейной электромеханической СУВТ ЖРД;
-
• выполнены расчёты частотных характеристик РТ СУВТ многоканальным моногармоническим методом «автоинтегрирования» без учёта квантования по времени и с его учётом;
-
• определено, что квантование по времени оказывает существенное влияние на частотные характеристики РТ СУВТ ЖРД;
-
• отличия в ФЧХ начинаются практически сразу после первой частоты из массива частот входного моногармонического сигнала, подаваемого в РТ СУВТ;
-
• отличия в АЧХ и ЛАЧХ начинаются приблизительно с частоты 3 Гц, что объясняется следствием теоремы Найквиста–Шеннона–Котельникова, согласно которой для сигнала, представленного последовательностью дискретных отсчётов, точное восстановление возможно, если частота дискретизации более чем в два раза выше частоты в спектре сигнала;
-
• частоту 3 Гц можно считать предельной, до которой можно вести расчёты АФЧХ и ЛАФЧХ РТ СУВТ в условиях квантования входного сигнала по времени.
