Исследование влияния паразитных колебаний вибрационного преобразователя массового расхода на результаты измерений

Автор: Пархоменко Геннадий Григорьевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2-1 (63) т.12, 2012 года.
Бесплатный доступ
Проведено исследование паразитных колебаний вибрационного преобразователя массового расхода, вызванных смещением точки приложения вынуждающей силы от оси симметрии U-образной трубки. Получены формулы определения абсолютной и приведенной аддитивной погрешности, выработаны критерии снижения этих погрешностей при проектировании расходомера.
Кориолисов расходомер, вибрационный преобразователь, массовый расходомер, u-образная трубка
Короткий адрес: https://sciup.org/14249794
IDR: 14249794 | УДК: 681.518.3
Study on influence of parasitic oscillations of vibrator mass flow transducer on measurement results
The parasitic oscillations of the vibrator mass flow transducer caused by the force point shift from the axis of symmetry of the U-tube are investigated. The defining formulas of the absolute and adduced additive errors are received. The criteria on reducing these errors in the flowmeter design are developed.
Текст научной статьи Исследование влияния паразитных колебаний вибрационного преобразователя массового расхода на результаты измерений
Введение. В последние десятилетия положено начало широкому распространению кориолисовых массовых расходомеров. Выпуск фирмой Micro Motion Inc. и последующая успешная эксплуатация вибрационного преобразователя с двумя U -образными трубками показали такие высокие качества данного типа расходомеров, как простота конструкции, высокая точность и независимость показаний от физических свойств измеряемой среды. Однако некоторые недостатки двухтрубной конструкции, например, наличие разветвлений потока и высокая жесткость трубок, делали ее пригодной только для измерений расхода незагрязненных жидкостей, а измерения массового расхода газов, легких и неньютоновых жидкостей оставались за границами области ее применения.
Вибрационные преобразователи массового расхода с одной U -образной трубкой не имеют основного недостатка двухтрубных преобразователей – прогрессирующей погрешности измерения массового расхода из-за нарушений симметрии разветвленного потока в трубках вибрационного преобразователя. Недостатки, свойственные однотрубным преобразователям (ограниченная пропускная способность и пониженная чувствительность к расходам легких веществ), могут быть в ряде случаев компенсированы техническими решениями, заложенными в конструкцию преобразователя. Для создания новых конструкций кориолисовых расходомеров на основе вибрационных преобразователей расхода необходимо создание теоретической модели, описывающей законы движения элементов, функцию преобразования массового расхода в параметры движения этих элементов, причины образования погрешностей измерения и пути их минимизации.
Целью настоящей работы является получение математического выражения аддитивной погрешности измерения массового расходомера, вызванной влиянием паразитных колебаний вибрационного преобразователя массового расхода, и разработка на основе полученной формулы путей ее минимизации или исключения из результата измерений.
Краткое описание конструкции и функции преобразования. Вибрационный преобразователь массового расхода представляет собой U -образную трубку, жестко закрепленную в основании свободными концами входного и выходного участков в виде консоли. Трубка приводится в колебательное движение с частотой ω вокруг оси, проходящей вблизи жесткой заделки свободных концов. При колебаниях консольная часть трубки перемещается в вертикальном направлении со скоростью v . При движении в трубке сжатого газа на консольные участки трубки действуют знакопеременные силы Кориолиса, направленные в противоположные стороны.
Вибрационный преобразователь массового расхода изображен на рис.1.
Рис.1. Деформация вибрационного кориолисового преобразователя массового расхода под действием сил Кориолиса
На участок 1 U -образной трубки на расстоянии L 1 от оси А-А действует сила Кориолиса F k 1 , направленная против движения трубки, а на участок 2 на расстоянии L 2 от оси А-А действует сила Кориолиса F k 2 , направленная по движению трубки. Действие сил Кориолиса F k 1 и F k 2 вызывает относительное смещение по вертикали Δ х участков 1 и 2, которое можно рассматривать как угол закручивания θ вокруг оси О-О [1, 2].
Функция преобразования массового расхода Q m в смещение Δ х описывается выражением: cc kr + - + —
Qm =A x----r-^L , (1)
m
4 rtoАВ где k – жесткость участков 1 и 2 трубки при изгибе; с, с3 – жесткость участков 1, 2 и 3 при скручивании; AB – амплитуда вынужденных колебаний трубки под действием вынуждающей силы.
Колебания трубки вокруг оси А-А вызываются действием синусоидальной вынуждающей силы F В ( t ) на участок 3 в точке, лежащей на оси симметрии О-О.
Кроме колебаний вокруг оси А-А , трубка совершает вынужденные колебания вокруг оси симметрии О-О под действием знакопеременных сил Кориолиса при движении газа по трубке. Таким образом, вибрационный преобразователь расхода имеет две степени свободы [3].
Описание причины возникновения паразитных колебаний и их исследование. Если в течение жизненного цикла расходомера произойдет смещение точки приложения вынуждающей силы F В от оси О-О на расстояние Δ r , то воздействие силы создаст знакопеременный вращающий момент относительно оси О-О , как показано на рис.2.
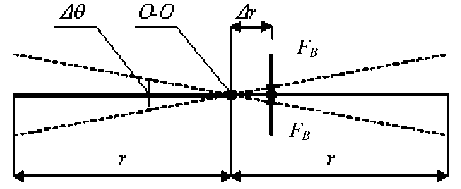
Рис.2. Колебания U -образной трубки при смещении точки приложения вынуждающей силы FB от оси О-О на величину Δ r
Паразитные колебания трубки вокруг оси О-О , т.е. колебания, не предусмотренные конструкцией и мешающие правильной работе вибрационного преобразователя, вызванные знакопеременным вращающим моментом Δ r ∙ F B ∙sinω t , происходят и при отсутствии движения газа через нее, что вызывает наличие некоторых начальных показаний расходомера. Следовательно, паразитные колебания создают аддитивную погрешность показаний, которая не зависит от величины измеряемого расхода, а определяется величиной смещения Δ r и значением вынуждающей силы F В . Для определения погрешностей, связанных с паразитными колебаниями, рассмотрим уравнение паразитных колебаний трубки под воздействием знакопеременного момента Δ r ∙ F B ∙sinω t при наличии сопротивления движению [4]:
d 20 d0.
J —- + p— + N0 = ArFR sin гоt,(2)
dt2 dt где J – момент инерции вращения участка 3 вокруг оси О-О; р – сила сопротивления движению; N – модуль кручения трубки вокруг оси О-О.
Разделив обе части уравнения на параметр J , получим следующее выражение:
d 2 0 d 0 A rF
-
—- + B— + ro20 =--- - sin го t , (3)
dt2 dt 0 J где β = p/J – коэффициент затухания; (ω0)2 = N/J – квадрат частоты собственных колебаний участка 3 вокруг оси О-О.
Рассмотрим движение трубки без влияния сил сопротивления. В этом случае уравнение (3) принимает вид:
d 2 0 A rF
-
—- + ron0 =---- sin гоt.(4)
dt20
Общее решение этого уравнения описывается выражением:
-
1 A rF„
0(t) = 0нач sin (ГО0t + ф) + "Г —----2sin(ГОt + Ф) .
J ГО0 -ro где Θнач – начальный угол; φ – начальная фаза.
Первое слагаемое правой части уравнения (5) определяет свободные, а второе слагаемое – вынужденные колебания трубки вокруг оси О-О . Под действием сил сопротивления свободные колебания затухают и установившееся движение представляет собой вынужденные колебания с частотой ω вынуждающей силы. Фаза установившихся колебаний при ω<ω 0 при отсутствии сил сопротивления движению мало отличается от фазы вынуждающих колебаний, поэтому формулу установившихся колебаний можно записать в виде:
A0( t ) =
1 A rF
J ® o — to
sin ( to t ) .
Выразим разность квадратов частот через отношение ω/ω 0 :
to 0
—
to
= to 0
—
to
— to 0 kto 0
J
= to 0
—
to
Vto 0 7
to 0
= to 0
1 —
to to0 J
Подставив полученное выражение в (6) и применяя обратную подстановку (ω0)2 = N/J, по- лучим зависимость угла скручивания от модуля кручения N трубки вокруг оси О-О [3]:
A0( t ) =
A tF b
JN i
—
J
к
—г- sin (tot) = to2 | to2 J
A tF b
N 1 к
—
to 2
to g
sin ( to t ) .
Для определения максимального значения рассматриваемой погрешности представим амплитудное значение угла Δθ а скручивания при паразитных колебаниях, выразив при этом вынуждающую силу как произведение коэффициента жесткости k трубки при изгибе и статического смещения A B /2 в виде:
A0 а
A tF b
A rkAH
B
N f 1 к
—
to 2
to 0
2 N 1 к
—
to2 i to0 J
где A B – амплитуда колебаний вокруг оси А-А; k – коэффициент жесткости трубки при изгибе вокруг оси А-А .
Модуль кручения N определяется как момент кручения U -образной трубки вокруг оси О-О , необходимый для ее поворота на угол в один радиан [3]. Исходя из этого, выразим модуль кручения N как отношение известного из (1) момента сил упругости, противодействующих силам Кориолиса, к углу скручивания θ :
A x f kr + c + c 3 J kr + c + c 3 , .
N = —к--- r—L ! = A x---r—L = 2 r I kr + c + c 3 | . (io)
0 A x к r L J
2 r
Подставив (10) в (9), получим формулу определения амплитуды угла скручивания при паразитных колебаниях вокруг оси О-О в зависимости от коэффициентов жесткости деформируемых участков трубки:
A0 а
A rkA
B 2
Л 7 ° C 3 i 1 to
4 r kr + - + — 14
к r L Jk to 0
Вывод формулы определения погрешности от влияния паразитных колебаний. Для определения абсолютной погрешности от влияния паразитных колебаний приравняем амплитуду угла Δθ а скручивания при паразитных колебаниях к эквивалентному углу скручивания θ Q под действием сил Кориолиса при расходе Q m :
A0 a =0 Q .
Найдем зависимость угла скручивания θ от массового расхода Q m . Для этого воспользуемся формулой (1), преобразовав ее в зависимость смещения Δx от массового расхода:
к 4 Q„r to A„
A x = --- B_
cc kr + - + — rL
Применив для упрощения дальнейших выкладок преобразование [5]
. _ А х
6 = sin 6 = — (14)
2r и подставив его в (13) в (14), найдем искомую зависимость угла θQ скручивания при действии сил Кориолиса:
Q ^А х = 4 Q m r to A b
Q r c c kr + - + — rL
•
± = 2 Qm to A b
2r c c kr + - + — rL
.
Подстановкой (11) и (15) в (12) составим уравнение, приравняв угол скручивания трубки при паразитных колебаниях к эквивалентному углу скручивания при расходе Δ Q m , соответствующем абсолютной погрешности при паразитных колебаниях:
А rkAH
B
л I , сс.
4 r I kr ++ —
V rL
= 2 А Q m to A b
-
2 c c .
i - _ kr + - + — го2 I r L
V to o 7
Решая уравнение относительно Δ Q m , получим формулу определения абсолютной погрешности от влияния паразитных колебаний:
А Q m
I C C.
А rkA„ I kr +1--
B
V r L
А r
8 rroAB I kr + c + c 3 I 1 B V r L
—
V
J
ш о 7
r
•
k
•
8® I
V
—
?)
ш о 7
Определим приведенную погрешность как отношение абсолютной погрешности к верхнему пределу измерения, выраженному функцией преобразования при Q max :
А r
•
r
k
-----------•
8 to
А Q
Y = ^m
Q max
1 — ^I
V to o 7 А r
-------------:-- = ----- •
k
•
А 1 1 , с с 3 I r n , с c 3 I 1
— I k +— 2 +I 2 toА 1 I k +— 2 +I 1
4 V r rL у V r rL 7
—
' 100% .
to to0
Преобразуем отношение коэффициентов жесткости, выразив их через упругие постоянные и моменты инерции сечений участков 1, 2 и 3:
k
cc k I . I — r2 rL
3 EJ p
2 L 3
( 3 2 I EJ
2 L ? + 2 r2 ( 1 + ц ) J
,
1 + 2 1 L I ( 1 + ц )
3 V r 7
где µ – коэффициент Пуассона материала трубки.
Выполнив подстановку в (17) преобразованного отношения коэффициентов жесткости (18) и выражения временного интервала как отношения Δ t = φ max /ω , получим окончательное выражение для определения приведенной аддитивной погрешности, связанной с влиянием паразитных колебаний в системе без сопротивления движению:
А r 1
Y =------ r 2^max
•
1 + 2 1 L | 2
3 V r 7
•
- 100% .
to
1 2
to 0
Правый сомножитель в полученной формуле для колебательной системы без сопротивления движению равен отношению амплитуды угла Δθ а к статическому углу Δθ ст при постоянном значении силы F B :
АО а = 1 .
АО ст 1 ю 2 .
1 - ~2
В системе с трением это отношение учитывает также влияние сил сопротивления движению, выражающееся коэффициентом затухания β , и определяется по формуле [4]:
АО а
АО ст
to I
+ 4
<Ю 0
£] ;tol к to 0 ) к to 0 )
Так как в механической колебательной системе всегда присутствуют силы сопротивления движению, то соответствующее выражение для приведенной погрешности измерения расхода от паразитных колебаний в системе с трением имеет вид:
Y =
r
А r 1
2 Ф тах
1 -к
to 2
to 0
+ 4
kto o
to I
kto 0
• 100% ,
где первый сомножитель правой части - относительное смещение точки возбуждения колебаний, второй сомножитель - коэффициент, учитывающий влияние угла сдвига фаз колебаний входного и выходного участков, третий сомножитель – относительная жесткость вибрационного преобразователя, четвертый сомножитель – соотношение динамической и статической амплитуд вибрационного преобразователя.
Исследование влияний составляющих погрешности. Параметром, образующим погрешность, является относительное смещение Δ r / r , которое зависит от смещения точки приложения вынуждающей силы от оси симметрии U -образной трубки и всегда присутствует в реальных конструкциях. Поскольку погрешность связана с относительным смещением линейной зависимостью, она может быть сведена к минимуму юстировкой положения возбудителя колебаний относительно оси симметрии О-О либо исключена из результата измерений схемотехническими или алгоритмическими методами.
Остальные параметры в уравнении (21) являются коэффициентами, влияющими на величину погрешности измерения расхода.
Влияние угла сдвига фаз колебаний входного и выходного участков. Угол сдвига фаз φ зависит от измеряемого расхода. Относительная погрешность связана со сдвигом фаз обратной зависимостью и достигает своего минимума при максимальном угле сдвига фаз, ограниченном сверху значением, при котором переменная величина ω А B cosω t изменяется в достаточно узких пределах, допустимых при аппроксимации постоянной величины скорости ω А B . Максимум погрешности достигается при минимальном значении угла сдвига фаз, ограниченного разрешающей способностью схемы выделения временного интервала между одинаковыми фазами колебаний входного и выходного участков трубки.
Влияние относительной жесткости зависит от соотношения размеров L и r . При длине участков L , превышающих длину плеча r в n раз, погрешность уменьшается приблизительно в (1+0,858 n 2) раз. Если r превышает длину L , то относительная жесткость трубки асимптотически приближается к единице, оказывая меньшее влияние на уменьшение погрешности.
Влияние соотношения динамической и статической амплитуд (20) на погрешность зависит от отношения частот ю/ю0. При частоте собственных колебаний © о , намного превышающей частоту вынужденных колебаний ©, отношение амплитуд близко к единице и не оказывает влияния на погрешность. При приближении частоты вынужденных колебаний к частоте собственных колебаний отношение амплитуд увеличивается, вызывая увеличение погрешности. При равенстве частот ю=ю0 отношение амплитуд резко возрастает, вызывая резкий рост погрешности, что связано с явлением резонанса колебаний. Для исключения явления резонанса отношение частот ю/ю0 не должно превышать 0,2.
Заключение. Полученное выражение приведенной погрешности измерения массового расхода от паразитных колебаний U -образной трубки дает возможность рассчитывать ее значение при определении суммарной погрешности массового расходометра. Кроме того, полученная формула позволяет оптимизировать соотношение геометрических размеров U -образной трубки с целью снижения погрешности при проектировании расходомера.
Список литературы Исследование влияния паразитных колебаний вибрационного преобразователя массового расхода на результаты измерений
- Tests of various configurations of Coriolis mass flowmeters/Pradeep Gupta, K.Shrinivasan, S.V. Prabhu//Elsevier. ScienceDirect. Measurement. -№39(2006). -С.296-307.
- Performance evaluation of an indigenously designed copper (U) tube Coriolis mass flow sensors/Satish C. Sharma, Pravin P.Patil*, Major Ashish Vasudev, S.C. Jain//Elsevier. ScienceDirect. Measurement. -№43 (2010). -С.1165-1172.
- Стрелков С.П. Введение в теорию колебаний/С.П. Стрелков. -М.: Наука, 1964. -440 с.
- Шкаликов В.С. Измерение параметров вибрации и удара/В.С. Шкаликов, В.С. Пеллинец, Е.Г. Исакович и др. -М.: Изд-во стандартов, 1980. -278 с.
- Рыбкин Н.А. Прямолинейная тригонометрия/Н.А. Рыбкин. -М.: Учпедгиз, 1933. -104 с.
