Исследование вынужденных колебаний линейной системы с двумя степенями свободы и малым параметром методом Ляпунова-Шмидта

Автор: Прохоров С.А., Шаманаев П.А.
Журнал: Огарёв-online @ogarev-online
Статья в выпуске: 12 т.9, 2021 года.
Бесплатный доступ
Работа посвящена нахождению периодических решений линейных систем с двумя степенями свободы и малым параметром методом Ляпунова-Шмидта. На основе метода Ляпунова-Шмидта разработан алгоритм в пакете Maple, построены графики компонент периодических решений и фазовых траекторий возмущенной системы.
Вынужденные колебания, малый параметр, метод ляпунова-шмидта, периодические решения, резонанс, система с двумя степенями свободы
Короткий адрес: https://sciup.org/147249990
IDR: 147249990 | УДК: 517.9
Investigation of forced vibrations of a linear system with two degrees of freedom and a small parameter by the Lyapunov-Schmidt method
The article is devoted to finding periodic solutions to linear systems with two degrees of freedom and a small parameter by the Lyapunov-Schmidt method. On the basis of the Lyapunov-Schmidt method, an algorithm was developed in the Maple package, graphs of the components of periodic solutions and phase trajectories of the disturbed system were constructed.
Текст научной статьи Исследование вынужденных колебаний линейной системы с двумя степенями свободы и малым параметром методом Ляпунова-Шмидта
В работе [5] приведено исследование периодических решений одной линейной неоднородной системы второго порядка с малым линейным возмущением. В работе [6] проведено исследование вынужденных колебаний одной линейной системы двух связанных осцилляторов с малым параметром.
В настоящей работе исследуются вынужденные колебания линейной системы с двумя степенями свободы и малым параметром при условии, что на систему действует внешняя периодическая сила с двумя соизмеримыми частотами.
Математическая модель вынужденных колебаний системы с двумя степенями свободы и малым параметром. Рассмотрим математическую модель вынужденных колебания системы с двумя степенями свободы в виде [7]
(? i +n 2 Q i -KQ2 = FM, I Q 2 +n22Q2-KQ i = F2(t),
где n2 и n2 — парциальные частоты, К > 0, функции Fi(t) и F2(t) имеют вид Fi(t) = Гц sin(wit + би) + т-12 sin(w2t +
F1(t) = Г21 sin(^it + 021) + Г22 sin(«2t + где rks, 0ks, шк £ R, k,s = 1, 2, ш2 = аы±, a £ Z. Обозначим T = —.
S
Исследуем вынужденные колебания системы (1), когда параметры системы мало отклоняются от заданных значений и две частоты вынужденных колебаний совпадают с двумя частотами собственных колебаний (случай резонанса). В этом случае, система (1) с учетом малого параметра будет иметь вид fQi + (n1 + £dn)qi + (—K+sdi2)q2 = Fi(t), I q2 + (-K + Edn^qi + (n1+ed12)q1 = F2(t),
Где dks £ R, k,s = 1,2, e - малый вещественный параметр. Заметим, что система (1)
получается из системы (3), если положить E = 0.
Сформулируем задачу для системы (3): при достаточно малых вещественных E найти
T -периодическое решение qi(t,E), q2(t,E) системы (3), удовлетворяющее условию qi(t,0) = Qi(t), q2(t,0~) = Q2(t), где Qi(t), Q2(t) есть T -периодическое решение системы (1).
Периодичность решения Qi(t), Q2(t) системы (1) достигается за счет подбора амплитуд rks и начальных фаз 0 k S в формуле (2) для периодических функций Fi(t) и F2(t).
Представление математической модели в виде системы обыкновенных дифференциальных уравнений в нормальной форме. Делая в системе (3) замену
X i = q i , X 2 = q i => X i = X 2 ,
X3 = q2, X4 = q2 => X3 = X4, получим систему обыкновенных дифференциальных уравнений в нормальной форме dx
~7~ = (Bq — EBi)x — f (t), dt где х £ R4,
b„ = (
0 —n i 0 К
0 К
—n 2
0 di,i 0 d2,i
0 di,2 0 d2,2
'f^'"'}
J ——FM/
Системе (1) соответствует неоднородная линейная система обыкновенных дифференциальных уравнений в нормальной форме dz
-^ = Boz-f ( t)
В этом случае задача, сформулированная для систем (1) и (3), перейдет в задачу для систем (5) и (6) в следующем виде: при достаточно малых вещественных г найти T —периодическое решение x(t,E) системы (5), удовлетворяющее условию x(t, 0) = z(t), где z(t) является T —периодическим решением системы (6).
В дальнейшем систему (5) будем называть возмущенной системой, а систему (6) – невозмущенной.
Вычисление периодического решения возмущенной системы методом Ляпунова-Шмидта. В работе [1] приведено решение поставленной задачи методом Ляпунова-Шмидта. Периодическое решение возмущенной системы будем вычислять с помощью разработанного на основе метода Ляпунова-Шмидта алгоритма в математическом пакете Maple.
Для иллюстрации разработанного алгоритма в пакете Maple выберем параметры системы (5) следующим образом:
^ 1 — 3, ^ 2 — 9, ^ 1 — ^2 — 45, К — 36, du — 2, d 22 — 2, d i2 — d2i — 0.
Собственные значения матрицы В0 при выбранных значениях параметров равны Л 1, 2 — ±3i, Х3 ,4 — ±91.
Поскольку для системы (6) частоты собственных колебаний совпадают с частотами вынужденных колебаний, то для система (6), а значит и системы (1) имеет место случай резонанса. В этом случае Г — -П и задача сводится к нахождению 2П —периодического решения системы (5).
Вычислим обобщенный жорданов набор оператора dx Ъо—Вох-А-dt по формулам
Во^ — 0, ®0^П — В^'Л (7)
где j = 2, рк, к — Си .
Согласно методу Эйлера, решения уравнений (7), будем искать в виде
Vk ) — и^е^, (8)
где Х.Е R, и(р Е R 4 .
Подставляя формулы (8) в уравнения (7), получим следующие элементы обобщенных жордановых цепочек оператора В0
^i1)^^) = el3t
"3^
1 l
— \17
( l \ " 54
4s I,
0 /
-
^ (1) (t) = el9t
А 1
—
/ "—\
I 1 6 2 I
, <р2 2) (о = е 1И 18
0 0
.
Здесь число и длины жордановых цепочек равны п = 2, р 1 = р2 = 2, соответственно.
Элементы обобщенных жордановых цепочек сопряженного оператора 30, удовлетворяющих условию биортогонализации, имеют вид
^ (1) = e3lt
,
^ (1) = e 9lt
Коэффициенты ck j в разложении искомого периодического решения вычислим по
формулам
T ckj = W,^^ = ^ J (fW'Vk^tydt, 0
k,j = 1,2 .
Учитывая формулы (11) и (12), получим
27r 11 eiS11 1 27r12e
iS12
,
С 12 =
3^ 12 6
,
81г21е1в 21
c21 = 2
-
81г22е1в 22
,
9r22eie 22
c?2 =--;----
22 4
.
Для того, чтобы система (6) имела
T -периодическое решение, необходимо и
достаточно, чтобы c ,, = 0 и c21 = 0 [1],
что эквивалентно следующим условиям,
соответственно,
r11e l0 1 1 + r12e ie 12 = 0, r21eie 21 —r22eie 22 = 0.
Решения уравнений (14) и (15) можно записать в параметрической форме, соответственно,
711 = 712 = 71, 011 = 01 012 = 01 + ^, r21 = r22 = r2, $21 = $2 $22 = $2, где ’к, $к, к = 1,2, - произвольные вещественные параметры.
После подстановки формул (16) и (17) в выражения (13), получим „ 3r1e1S1 п 9r2e102
С11 = °, С 12 = 7 , С 21 = °, С 22 = 7 .
4 4
Тогда при г ^ 0 вычисляя величины ^к по формулам (3.3) из работы [1], получим 3r1e t0 1 9r?e102
^ 1 =“' ? 2 =4Т
Дополнительное слагаемое у(г), входящее в -L —периодическое решение системы (5)
и принадлежащие к дополнению корневого пространства, имеет вид
y(t, г) =
( — MF+M’^111^ + $ ■ ' 318 2 ‘б’? n 9' + $ 2 ))
— 128г + 12 r 1 Cos (3t + $ 1 ) — (4!г—■ 1) ’ 2 C0S (9t + $ 2 ) -2Р2—2’ 1 S1n(3t + $ 1 ) + 2г 2 г— 2 r 2 S1n (9t + $ 2 ) — 223—2r 1 cos(3f + $ 1 ) + 2Р9—2’ 2^ (9t + $ 2 )
—
—
—
—
—
—
—
—
.
\
/
Таким образом, подставляя формулы (9), (10), (18) и (19) в выражение (3.4) из работы
[1], получим -L - периодическое решение системы (5)
x(t, г) =
I — ^r 1 sin(3t + $ 1 )
— — r 1 cos(3t + $ 1 )
2г _
—
—
— r 2 Sin(9t + $ 2 ) \
;9-r 2 COS(9t + $ 2 ) 21г . ..
.
—
\—
— r 1 s1n(3t + $ 1 ) + —T 2 sin(9t + $ 2 ) r 1 cos(3t + $ 1 ) + ^r 2 cos(9t + $ 2 ) /
2г 2г '
Построение графиков компонент периодического решения и фазовых траекторий системы (3). Учитывая замену (4) из формулу (21), получим qi(t, г) = — ^r sin(3t + ej —-^^ш^С + $2), 2г 2г q2(t,г) = — 71r1s1n(3t + $1) +;1r2s1n(9t + $2). 2г 2г
Для построения графиков компонент решений и фазовых траекторий системы (3) выберем следующие наборы параметров:
1) ’ 1 = 0,5; ’ 2 = 0,3; $ 1 = 0; $ 2 = 0;
-
2) ’ = 0,5; r2 = 0,3; $г = 0; $2
-
3) ’ = 0,5; r2 = 0,3; $г = 0; $2
2L 5'
4n
I
;
.
решения и фазовых траекторий системы (3) при различных значениях параметра г.
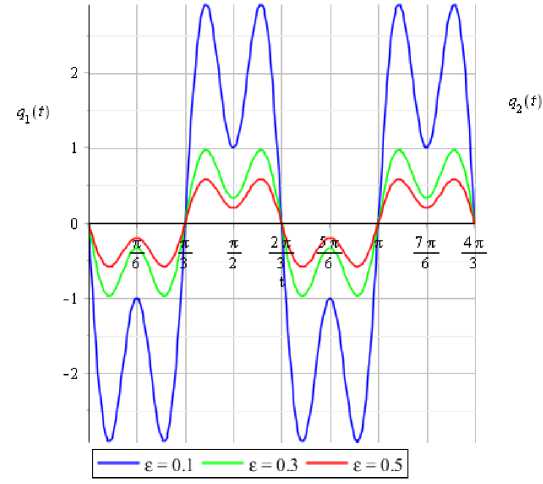
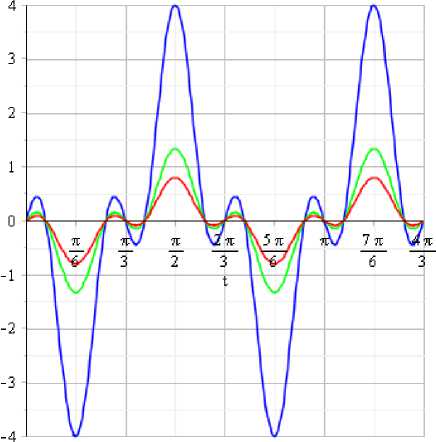
-----£ = 0.1 -----£ = 0.3-----£ = 0.5
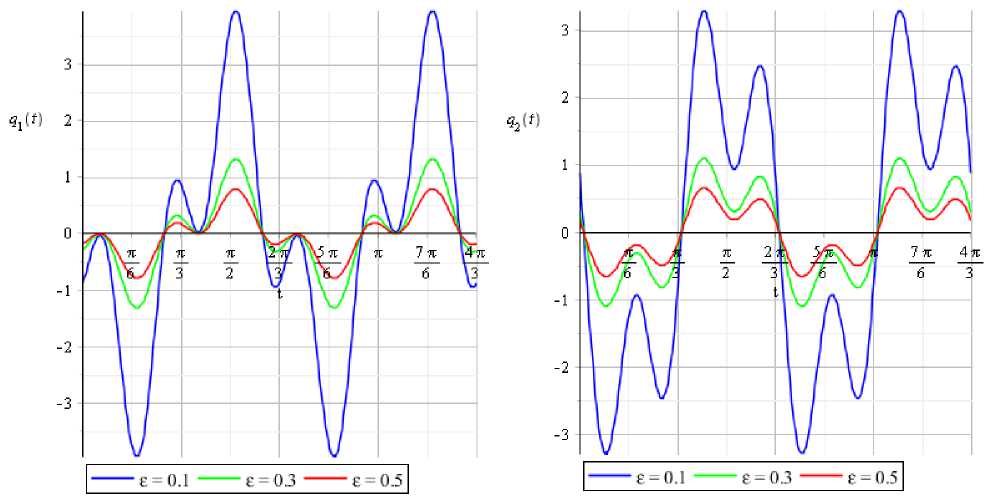
а) q i (t^) б) ? 2 (t, г).
Рис. 1. Графики компонент а) q 1 (t, г) и б) q2(t, г) 2^ — периодического решения
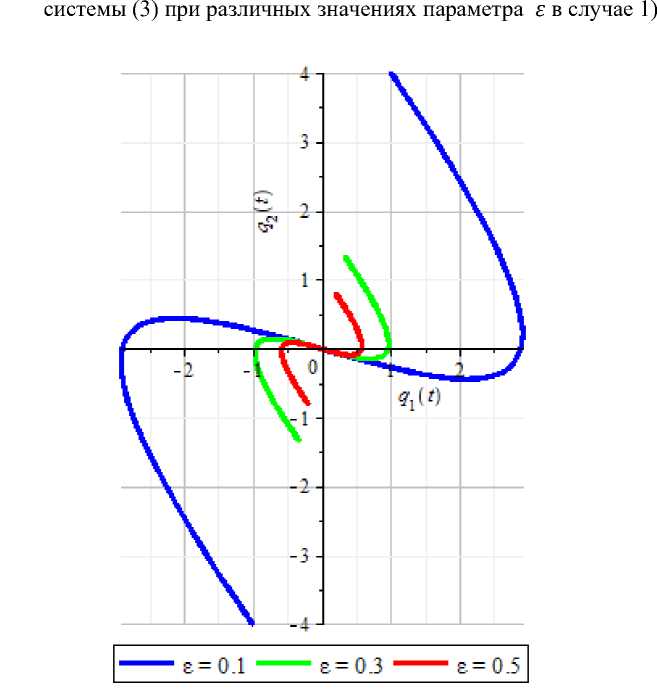
Рис. 2. График фазовой траектории системы (3)
в конфигурационном пространстве Oq 1 q2 при различных г в случае 1).
решения и фазовых траекторий системы (3) при различных значениях параметра г.
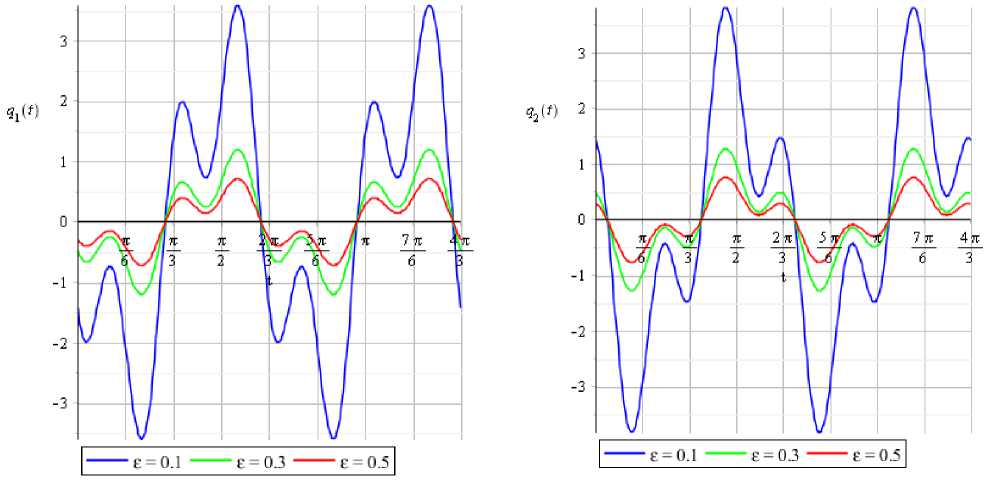
а) q^t^; б) q 2 (t,г').
Рис. 3. Графики компонент а) q 1 (t, г) и б) q2(t, г) 2^ — периодического решения системы (3) при различных значениях параметра г в случае 2).
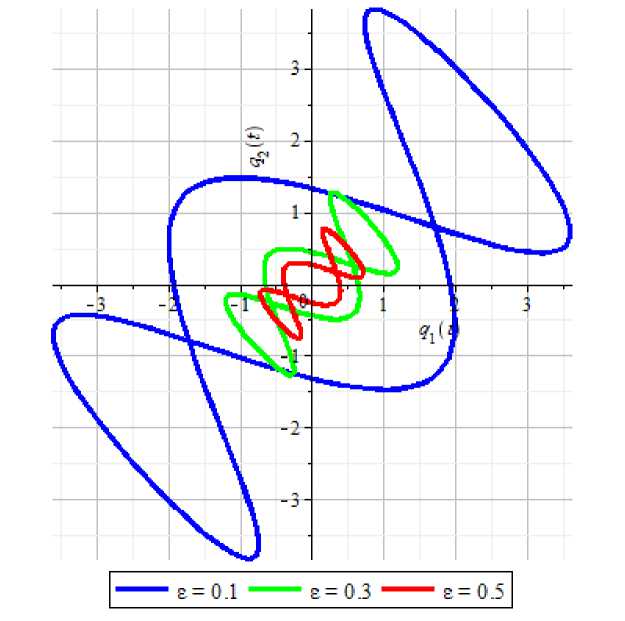
Рис. 4. График фазовой траектории системы (3)
в конфигурационном пространстве Oq 1 q2 при различных г в случае 2).
решения и фазовых траекторий системы (3) при различных значениях параметра г.
а) q^t^; б) q 2 (t,г').
Рис. 5. Графики компонент а) q 1 (t, г) и б) q2(t, г) 2^ — периодического решения системы (3) при различных значениях параметра г в случае 3).
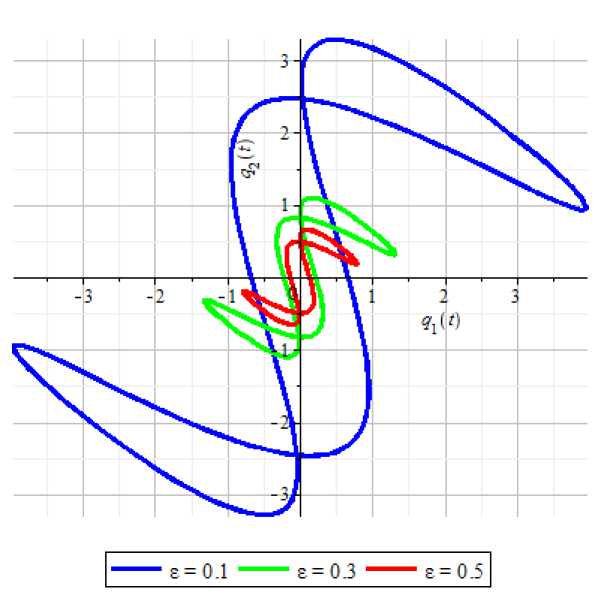
Рис. 6. График фазовой траектории системы ( 3)
в конфигурационном пространстве Oq 1 q2 при различных г в случае 3).
Заключение. Из формулы (21) следует, что каждая компонента —— периодического решения системы (3) имеют полюс первого порядка в точке £ = 0 и зависит от тех же начальных фаз 6ks и амплитуд rks, что и периодические функции F^t) и F—(t).
Список литературы Исследование вынужденных колебаний линейной системы с двумя степенями свободы и малым параметром методом Ляпунова-Шмидта
- Кяшкин А. А., Логинов Б. В., Шаманаев П. А. О ветвлении периодических решений линейных неоднородных дифференциальных уравнений с вырожденным или тождественным оператором при производной и возмущением в виде малого линейного слагаемого // Журнал Средневолжского математического общества. - 2016. - Т. 18, № 1. - С. 45-53. EDN: WEAIXH
- Вайнберг М. М., Треногин В. А. Теория ветвления решений нелинейных уравнений. - М.: Наука. - 1964. - 524 с.
- Коноплева И. В., Логинов Б. В. Обобщенная жорданова структура и симметрия разрешающих систем ветвления // Вестник Самарского университета. - 2001. - № 4. - С. 56-84. EDN: WQLMIF
- Коноплева И. В., Логинов Б. В., Русак Ю. Б. Симметрия и потенциальность уравнений разветвления в корневых подпространствах в неявно заданных стационарных и динамических бифуркационных задачах // Известия высших учебных заведений. Северо-Кавказский регион. Серия: Естественные науки. - 2009. - С. 115-124. EDN: YWZGBJ
- Кадрякова М. Р., Логинов Б. В., Шаманаев П. А. О периодических решениях одного класса линейных неоднородных систем обыкновенных дифференциальных уравнений с малым параметром в резонансном случае // Огарев-online. - 2017. - № 13. - С. 8-17 [Электронный ресурс]. - Режим доступа: http://journal.mrsu.ru/arts/o-periodicheskix-resheniyax-odnogo-klassa-linejnyx-neodnorodnyx-sistem-obyknovennyx-differencialnyx-uravnenij-s-malym-parametrom-v-rezonansnom-sluchae (дата обращения: 25.09.2021). EDN: ZPEBAJ
- Карчиганов А. Ф., Шаманаев П. А. Исследование вынужденных колебаний одной линейной системы двух связанных осцилляторов с малым параметром // Огарев-online. - 2020. - № 13. - С. 8-17 [Электронный ресурс]. - Режим доступа: http://journal.mrsu.ru/arts/issledovanie-vynuzhdennyx-kolebanij-odnoj-linejnoj-sistemy-dvux-svyazannyx-oscillyatorov-s-malym-parametrom (дата обращения: 25.09.2021). EDN: KDGGQY
- Стрелков С. П. Введение в теорию колебаний: Учебник. - 3-е изд., испр. - СПб.: Лань, 2005. - 440 с. EDN: QJOSPH
