Исследования автоматической системы управления с пропорционально-интегрально-дифференциальным регулированием

Автор: Емельянов Р.Т., Спирин Е.С., Кирилов К.В., Цыганкова А.В.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Энергообеспечение и энерготехнологии
Статья в выпуске: 10, 2013 года.
Бесплатный доступ
Разработана автоматическая система управления (АСУ) измерителем-регулятором с ПИД-регулированием. Приведены результаты моделирования АСУ.
Асу, пид-регулятор, отклонения регулируемой величины, структурная схема, колебательный процесс, лабораторное оборудование
Короткий адрес: https://sciup.org/14082733
IDR: 14082733 | УДК: 625.056/086:678.842.1
The study of automatic control system with the proportional-integral-differential control
The automatic control system (ACS) of meter-controller with PID control is developed. The simulation results of ACS are given.
Текст научной статьи Исследования автоматической системы управления с пропорционально-интегрально-дифференциальным регулированием
D = Y —_, i 100% где Tсл – период следования импульсов.
На рисунке 1 приведено лабораторное оборудование АСУ нагревательной печи.
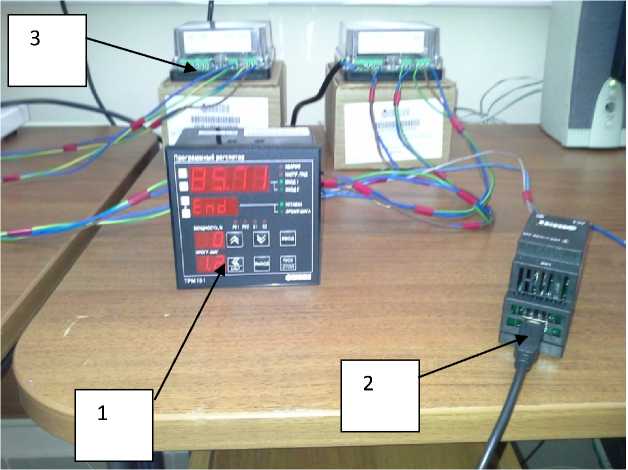
Рис. 1. Общий вид лабораторного оборудования: 1 – универсальный программный ПИД-регулятор;
2 – преобразователь интерфейсов; 3 – нагревательная печь
Температура в печи определится уравнением (1)
т = Q абс абс абс абс
1 - exp
— t ' k абс'F абс m абсп ' c абс
+ T 0 ,
где Qабс - количество теплоты, выделяемое печью за время d T ; с i - средняя удельная теплоемкость печи; К абс – коэффициент теплопередачи; F абс – площадь внешней поверхности элементов печи; m абс – масса элементов печи; τ 0 – текущая температура в печи.
Структурная схема температурного состояния печи представлена на рисунке 2. Для моделирования поведения динамических систем, к которым относится и система теплового состояния печи, используются ЭВМ. Существует большое количество алгоритмических языков, на которых может быть выполнено решение задачи. Выбор того или иного языка программирования зависит от многих условий. Часто решающую роль оказывает удобство программирования, наличие проверенных математических методов, легкость представления результатов моделирования. Такими особенностями обладает пакет MATLAB, содержащий в своем составе инструмент визуального моделирования SIMULINK.
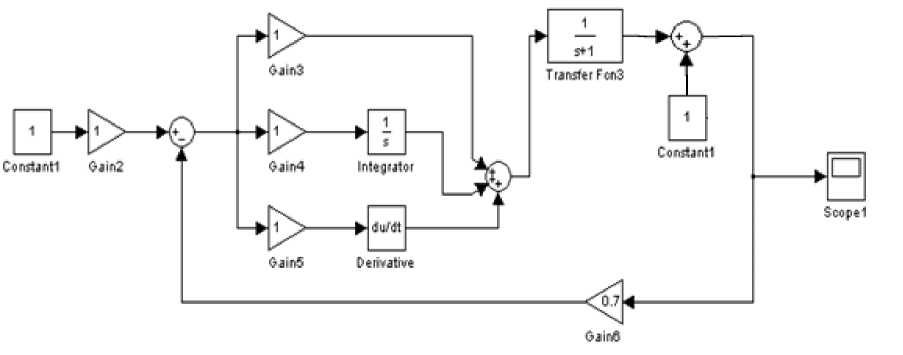
Рис. 2. Структурная схема АСУ печи с ПИД-регулированием
Модель, описывающая зависимость (2) в среде «Matlab+ Simulink», приведена на рисунке 3.
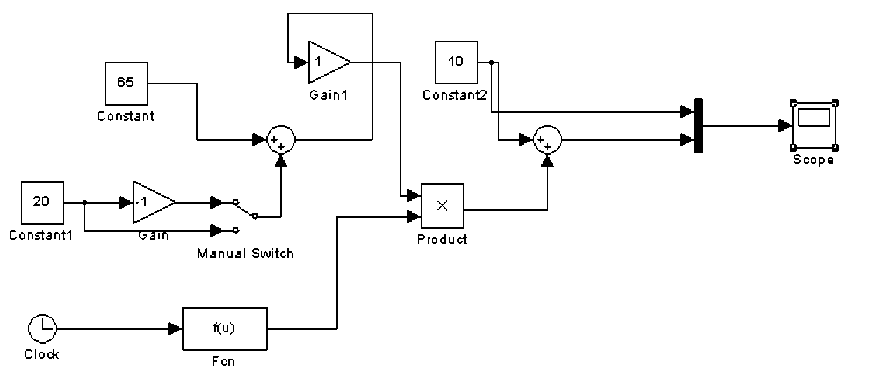
Рис. 3. Модель, описывающая зависимость (2) в среде «Matlab+ Simulink»
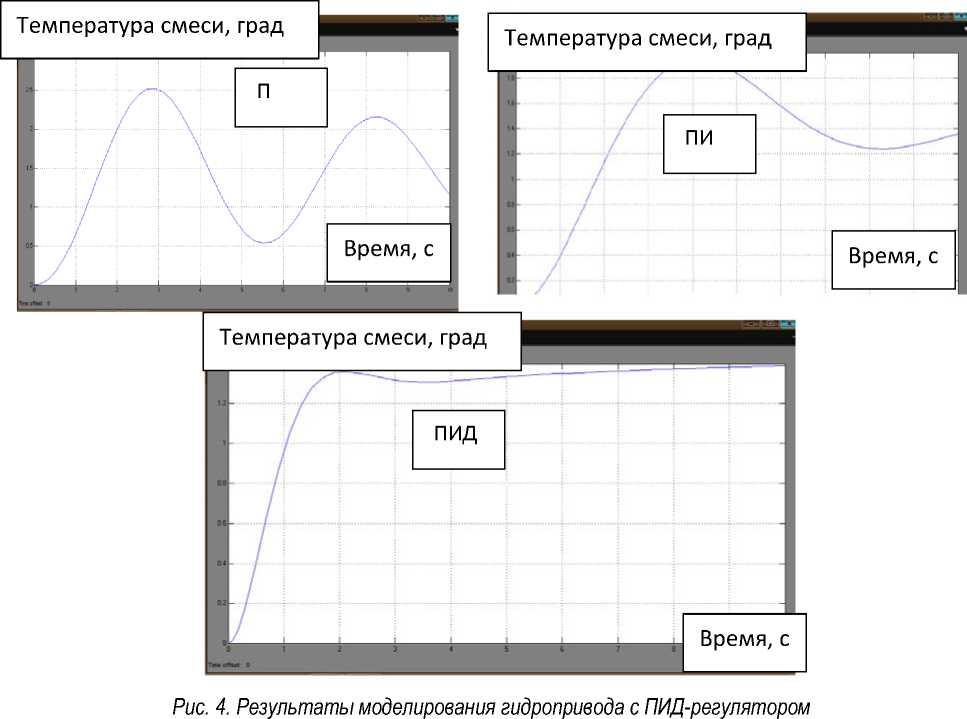
Здесь пропорциональная, интегральная и дифференциальная составляющие ПИД-регулятора через сумматор поступают на передаточную функцию печи. При этом введена обратная связь выходного сигнала печи с входным сигналом от температуры в печи. Результаты моделирования АСУ с ПИД-регулятором приведены на рисунке 4. С изменением коэффициентов составляющих ПИД-регулятора колебательный процесс переходит в затухающий.
Исследования АСУ с ПИД-регулятором ТРМ12 проводились в лабораторных условиях для процесса регулирования температурного режима нагревательной печи. Функциональная схема процесса измерений приведена на рисунке 5.
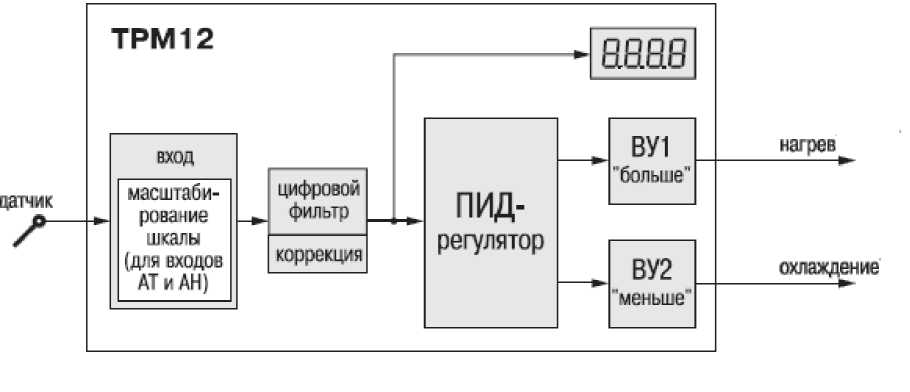
Рис. 5. Схема процесса измерений
Процесс управления температурным режимом печи измерителем-регулятором ТРМ12 приведен на рисунке 6.
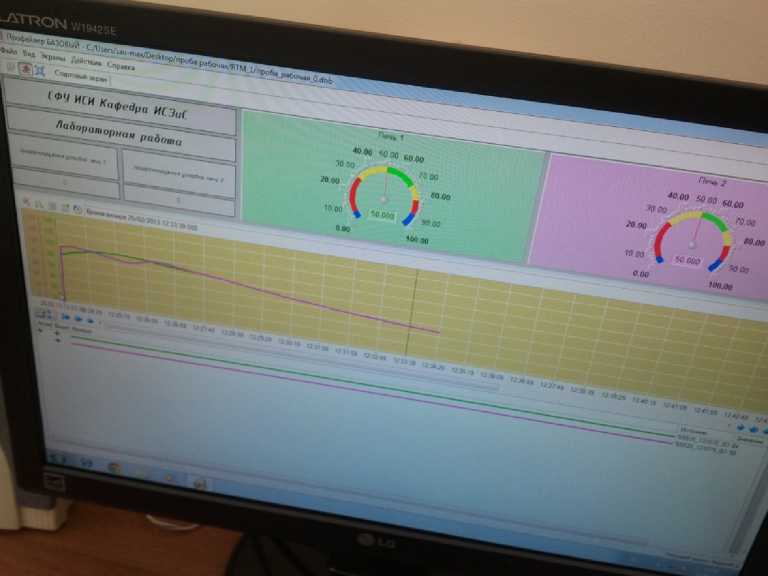
Рис. 6. Процесс измерения температурного режима
Выводы . При скачкообразном изменении регулируемой величины ПИД-регулятор в начальный момент времени оказывает мгновенное бесконечно большое воздействие на объект регулирования, затем величина воздействия резко падает до значения, определяемого пропорциональной составляющей, после чего постепенно начинает оказывать влияние интегральная составляющая регулятора.
