Исследования по созданию автоматизированной системы весового контроля

Автор: Нестерихин Ю.Е., Исаев В.К., Лазарев В.В., Сорокин С.В.
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Оригинальные статьи
Статья в выпуске: 3 т.1, 2009 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/142185601
IDR: 142185601
Текст статьи Исследования по созданию автоматизированной системы весового контроля
Массово-инерционные характеристики (МИХ) существенным образом влияют на летно-технические, экономические показатели и безопасность полета летательного аппарата (ЛА). Эти характеристики изменяются по этапам жизненного цикла (ЖЦ) изделия, при его модификациях от полета к полету каждого конкретного экземпляра и, естественно, на протяжении полета. Точное знание значения массы самолёта и его основных компонентов необходимо на всех этапах его разработки: от стадии концептуального проектирования, когда выбирается компоновочная схема самолёта, до стадии лётных испытаний и сертификации, когда фиксируются значения массы и моменты инерции самолёта, удовлетворяющие требованиям норм летной годности и обеспечивающие необходимые прочностные и динамические характеристики ЛА [1].
Особое значение имеет осуществление комплекса мер по изделию на ранних этапах жизненного цикла при проектно-конструкторской разработке. Уже тогда должны быть представлены средства, обеспечивающие возможность автоматизированной работы с весовой инфор- мацией для всех участников технологических процессов. Основной задачей является создание автоматизированной системы, позволяющей в режиме реального времени управлять весом (массово-инерционными характеристиками) на всех этапах ЖЦ изделия.
Масса каждого конкретного экземпляра самолёта, находящегося в эксплуатации, — величина переменная. Величина взлетной массы пассажирского самолёта определяется его комплектацией для данного полета: запасом топлива в зависимости от дальности полета по маршруту, компоновкой пассажирского салона, числом мест, занятых в рейсе, наличием и массой груза, величиной аэронавигационного запаса топлива (АНЗ) и т. д. Масса самолёта изменяется в процессе полета при расходовании топлива и в зависимости от метеоусловий и режима полета.
Для однозначного понимания терминологии в авиационной отрасли существует отраслевой стандарт ОСТ 1 00428-81 «Весовые характеристики самолёта. Термины и определения». ОСТ включает в себя группы стандартизованных терминов, используемых на всех этапах ЖЦ изделия:
— лимитная масса — максимальное значение массы изделия, установленное руко-
ТРУДЫ МФТИ. — 2009. — Том 1, № 3 водителем проекта для разработки данного изделия;
-
— чертежная масса — значение массы, указанное в чертеже или спецификации;
-
— фактическая масса — значение массы, полученное в результате взвешивания изготовленного изделия;
-
— текущая масса — суммарное значение массы, состоящее из фактической массы изготовленных изделий, чертежной массы изделий, не изготовленных в производстве, и лимитной массы изделий, на которых не выпущены чертежи.
В дополнение к приведённым обозначениям используются термины:
-
— гарантированная масса;
-
— проектная масса;
-
— резерв массы;
-
— технологическая масса;
-
— функциональная масса.
Обозначенные термины могут использоваться применительно к ЛА в целом, его агрегатам, готовым изделиям и комплектующим.
Полная масса самолёта включает постоянную и переменную составляющие. Постоянная часть неизменна для данного экземпляра самолёта. Переменная часть зависит не только от расхода топлива в процессе полета, но меняется в каждом полетном задании.
Задачей весового контроля является создание условий для выполнения весовой программы, прогнозирования окончательного веса изделия и выяснения необходимости принятия мер по облегчению конструкции и/или повышению её надежности. Для выполнения указанной задачи в автоматизированной системе весового контроля (АСВК) должны осуществляться сбор, накопление, обработка, хранение и выдача весовой информации как в целом по изделию, так и по любой его части на всех этапах ЖЦ [2].
АСВК является системообразующей основой CALS-систем и технологий [3], так как позволяет эффективно решать важную задачу управления весом изделия. С весом связаны конструкция, материалы, технологии всех предметных областей: научных, конструкторских, технологических, финансовых, управленческих, информационных, кадровых и др. В работе дан системный анализ основных связей и информационных потоков АСВК в све- те CALS-технологий, ставятся и решаются основные задачи АСВК.
В задачи обработки входят расчёт и прогнозирование всей массово-инерционной информации, необходимой для расчёта: веса, центровки, моментов инерции и главных осей инерции изделия и его любых частей. Указанные операции производятся на основании вводимых значений лимитного, чертежного, фактического весов, составляющих изделие частей.
На основании ввода текущей информации АСВК производит формирование банка данных АСВК, а в дальнейшем, по мере поступления новых сведений, включаются данные об изменениях весовых характеристик, положений центров масс элементов, полученных в процессе доработки любых агрегатов изделия, — его модификацию и пополнение.
По текущему состоянию банка данных комплекс программ АСВК производит расчёт и выдачу информации о массово-инерционных характеристиках любого агрегата и изделия в целом. Информационное и программное обеспечение АСВК реализует процедуру замещения веса любых деталей и агрегатов изделия в следующей последовательности: лимитный вес → чертежный вес → фактический вес.
В проблеме создания программно-технического комплекса АСВК следует выделить три основополагающих задачи [4]:
-
— разработка информационного хранилища весовой информации и вычислительных алгоритмов для работы с ним;
-
— разработка интерактивной среды автоматизации деятельности пользователей;
-
— разработка гетерогенной среды обеспечения межсистемного информационного взаимодействия.
II. Математическая модель задачи весового контроля
При формировании банка данных (БД) весовых характеристик в АСВК используется существующая практика декомпозиции изделия на агрегаты, системы и узлы (сборочные единицы).
Предусматривается введение системы координат для описания элементов каждой сборочной единицы. Для основного изделия (сборочная единица уровня 0) уста- навливаются общая система отсчёта. Основное изделие декомпозируется с учётом весовой классификации на агрегаты и системы. Каждому агрегату назначаются локальные системы отсчёта. Эти агрегаты и системы представляют собой крупные сборочные единицы уровня 1, состоящие из ряда деталей и более мелких единиц уровня 2 и т. д., для которых последовательно назначаются системы отчёта следующего уровня (2, 3, 4). Количество уровней в каждом конкретном случае определяется весовым подразделением.
Системы координат любой сборочной единицы привязываются (в конечном итоге только к первой) вышестоящей системе координат. В качестве основной принята левая прямоугольная система координат. Все сборочные единицы записываются в этой системе координат. Для сборочных единиц «отражённого вида» независимо от их уровня система координат меняется на противоположную (правую). Это необходимо учитывать при записи углов поворота.
Понятие симметричности сборочных единиц и деталей вводится относительно плоскости симметрии основного изделия по полету независимо от того, «правые-левые» по чертежу они или нет. В АСВК приняты следующие обозначения (рассматриваются на примере плоскости симметрии):
-
— «правая», сборочная единица или деталь расположена только справа от плоскости симметрии;
-
— «левая», сборочная единица или деталь расположена только слева от плоскости симметрии;
-
— «правая-левая», сборочная единица или деталь расположена с любой стороны от плоскости симметрии, а на противоположной стороне симметрично расположена сборочная единица или деталь «отражённого вида».
Сборочным единицам и деталям при необходимости присваивается признак симметрии: правый, левый, правый-левый.
Признак симметрии сборочной единицы распространяется на все входящие в неё сборочные единицы (вне зависимости от их уровня) и детали. Признак симметрии детали распространяется и на её части (в случае членения детали на части).
Для определения массово-инерционных и центровочных характеристик изделия с помощью АСВК информацию необходимо ввести на страницу портала. Данные должны обновляться на все выпущенные вновь чертежи и все последующие изменения.
Информация вводится на каждую установленную для заполнения сборочную единицу. Для сборочных единиц «отражённого вида», устанавливаемых симметрично, в систему вносятся данные только об одном из двух симметричных элементов.
В системе должны присутствовать [5]:
-
— идентификатор пользователя, осуществившего ввод в систему информации;
-
— дата внесения или исправления (вносится автоматически);
-
— номер чертежа изделия;
-
— шифр-идентификатор изделия;
-
— признак симметрии для сборочной единицы, детали;
-
— параметры привязки к вышестоящей системе координат;
-
— значения плоскостных углов.
Последние задаются в случае, когда используемая система конструирования не позволяет получить соответствующую матрицу поворота (табл. 1).
Таблица 1
Виды плоскостных углов
|
угол |
между осями |
в плоскости |
|
α |
X i и X i +1 |
H |
|
a |
X i и X i +1 |
V |
|
в' |
y i и y i +1 |
V |
|
в” |
y i и y i +1 |
W |
|
γ |
z i и Z i +1 |
H |
|
Y " |
z i и Z i +1 |
W |
H , V , W — горизонтальная, фронтальная, профильная плоскости проекции соответственно (рис. 1), x i , y i , z i — оси координат ближайшей вышестоящей сборочной единицы
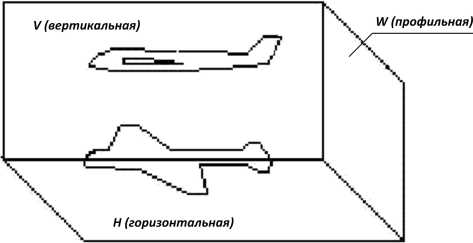
Рис. 1. Основные плоскости проектирования
В БД содержатся текущие значения и динамика изменений массово-инерционных характеристик, полученные расчётным путём или введённые извне.
В АСВК при проведении операций по вводу и контролю весовых характеристик используются правила, служащие основанием для проведения расчётов [6]: лимитный вес берется из весовой сводки, чертёжный вес — из чертежа сборки. Центровка и моменты инерции рассчитываются путём суммирования по всем деталям, составляющим сборку.
Если используемая (автоматизированная) система конструирования не позволяет непосредственно получить матрицу перехода, то нижестоящая сборка по отношению к вышестоящей определяется шестью плоскостными углами и радиусом-вектором начала координат нижестоящей сборки в системе координат вышестоящей. Шесть плоскостных углов позволяют опре- k 1 — a 31 io + a 32 jo + a 33 k o ■
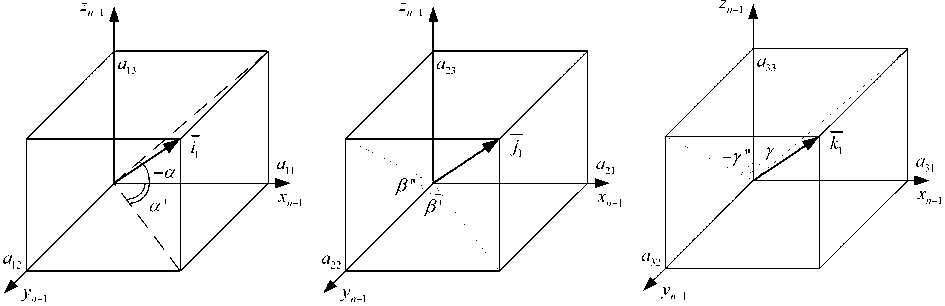
Рис. 2. Плоскостные углы a , af , в ' , в " , Y , Y "
Явные выражения элементов матрицы перехода через 6 плоскостных углов а , а ’, в ' , вм , Y , Y м (рис. 2), которые определяют положение ортов i 1 ,j 1 ,k 1 системы x n , y n , z n относительно системы x n - 1 , y n - 1 , z n - 1 , могут быть получены из соотношений:
Если начала систем координат совпа- дают, то матрица перехода от системы координат с ортонормированным базисом (io ,jo ,ko) к системе координат с базисом
( i 1 ,3 1 ,к 1 ) определяется ющими косинусами:
девятью направля-
I I cos yi | | =
a 11 a 21
a 31
a 12 a 13
a 22 a 23
a 32 a 33
где i1 = a 11 io + a 12 jo + a 13 ko, j1 — a 21 io + a 22 jo + a 23 ko,
После чего матрица перехода от координатной системы сборки n -го уровня к координатной системе сборки n — 1-го уровня примет вид
cos Yi —
А1 А1 tg( а') —А 1 tg( а)
— — А2 tg(в') А2 А2 tg(в") ,
А 3 tg( y ) —А 3 tg( y ") А 3
где
А sign(90 0 — | а ' | )
-
1 V1 + tg2 а' + tg2 а а
- А = sign(900 — |в'' |)
-
2 V1 + tg2 в' + tg2 в' ’
А^ = sign(90 0 — |y 1)
-
3 V 1 + tg 2 Y" + tg 2 Y'
В случае, если один или два плоскостных угла равны 90 ° , направляющие косинусы вычисляются по формулам:
-
— если а = а = 90°, либо а = 0 и а' = 90°, либо а = 90° и а' = 0, тогда a 11 = 0, a 12 = sign( а'), a 13 = - sign( а);
-
— если в ' = в '' = 90 ° , либо в ' = 0 и в '' = 90 ° , либо в ' = 90 ° и в '' = 0, тогда a 22 = 0, a 21 = - sign( в ' ), a 23 = sign( в '' );
— если y = Y '' = 90 ° , либо y = 0 и Y '' = 90 ° , либо Y = 90 ° и y '' = 0, тогда a 33 = 0, a 31 = sign( Y ), a 32 = - sign( Y '' ).
Таблица 2
Расслоение на логические уровни в системе
|
1 Презентационный уровень |
Интерфейс системы, организованный на основе Web-технологий. Данный уровень системы представляет данные системы пользователю и обеспечивает оперативный ввод и изменение данных при наличии у пользователя определённых прав в системе. |
|
2 Уровень логики предметной области |
Данный уровень содержит программные объекты и программный код, который реализуют логику работы системы. Компоненты выполняются на сервере с разделением общих ресурсов сервера. |
|
3 Уровень данных |
Уровень хранения данных обеспечивает долговременное эффективное хранение данных системы. Уровень может включать в себя внутренние хранилища данных, внешние СУБД и компоненты для доступа к данным. Уровень предоставляет программный интерфейс для объектов уровня бизнес-логики. Программные средства данного уровня поддерживают работу на отдельном аппаратном устройстве, сервере. |
III. Программная модель автоматизированной системы весового контроля
АСВК является централизованной информационной системой, представленной в виде корпоративного портала Microsoft Office Sharepoint Server. Портал представляет пользователям единую точку доступа к данным вычислительной сети. В системе производится выделение программных слоёв — АСВК реализуется в рамках трёхуровневой модели (табл. 2).
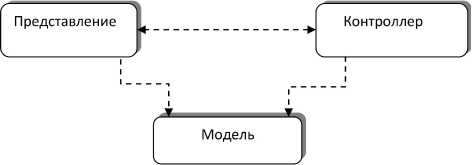
Рис. 3. Схема типового решения «мо- дель–представление–контроллер»
Программная архитектура системы базируется на введённых выше слоях и представлена в виде типового решения «мо-дель–представление–контроллер» [7], что подразумевает выделение трёх отдельных ролей (рис. 3).
Модель — это объект, предоставляющий некоторую информацию о предметной области. У модели нет визуального интерфейса, она содержит в себе все данные и поведение, не связанные с интерфейсом. Представление отображает содержимое модели средствами графического интерфейса. Все изменения информации обрабатываются третьим «участником» системы — контроллером. Контроллер получает входные данные от пользователя, выполняет операции над моделью и указывает представлению на необходимость соответствующего обновления. В этом плане графический интерфейс (GUI) рассматривается как совокупность представления и контроллера.
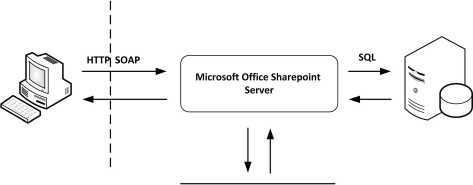
Клиентское приложение АСВК, отвечающее за представление, взаимодействует с серверными программными объектами, реализующими логику системы; осуществляется отправка на веб-сервер запросов пользователя на просмотр, изменение и поиск данных. Для передачи информации ис- пользуются стандартные Internet-протоколы передачи данных: HTTP, SOAP.
Серверная часть системы принимает и обрабатывает запросы пользователей, генерирует ответы на запросы. Серверное программное обеспечение реализовано на основе веб-сервера Microsoft Internet Information Services под управлением продукта Microsoft Sharepoint Services [8].
Обмен данными для сервисов портала, основанных на стандартных возможностях продукта Microsoft Sharepoint, обеспечивается механизмами самого продукта. Помимо этого, сервисы могут осуществлять взаимодействие с внутренним хранилищем данных на основе SQL-запросов с использованием объектов доступа к данным ADO или ADO.NET (рис. 4).
Метаданные Sharepoint Server
XML шаблоны
Рис. 4. Схема обмена данными между уровнями в системе
В основе ядра Sharepoint используется концепция HTTP-модулей: все запросы перенаправляются в программный модуль, который на основе адресной строки и передаваемых параметров формирует соответствующий отклик системы. Технически в рамках технологии ASP.NET существует механизм интерфейса IHttpModule. Создается сборка, в которой декларируется класс-обработчик, реализующий указанный интерфейс. В дальнейшем класс-обработчик регистрируется в рамках вебсервера IIS в качестве обработчика запросов, и при обработке запроса вызов делегируется объекту-экземпляру этого класса. Данная методика является реализацией паттерна FrontPageController [9].
-
— рабочий демон-процесс Sharepoint;
-
— серверные компоненты АСВК;
-
— Workflow сервис АСВК.
Рабочий демон-процесс Sharepoint представлен в виде стандартного программного модуля, входящего в ядро Sharepoint. Низкоуровневое взаимодействие с исполняемым процессом веб-сервера Internet Information Services построено на базе технологии ISAPI расширений. Этот компонент обеспечивает системные возможности: низкоуровневая обработка запросов, маршрутизация обработки запросов, администрирование, обеспечение ролевой безопасности и т. д.
Серверные компоненты АСВК представлены набором типовых пользовательских элементов управления, базирующихся на технологии веб-частей Microsoft Sharepoint, и набором программных модулей, реализующих технологические операции по взаимодействию с информационным хранилищем и представляющих домен предметной области [9] АСВК.
Workflow сервис АСВК предоставляет расширенные средства автоматизации динамических бизнес-процессов, то есть процессов, которые подвержены изменениям с течением времени. Сюда относятся задачи по контролю информационных потоков весовой информации в системе, обеспечение распределенного взаимодействия, управление расписаниями выполнения системных операций по обеспечению надлежащего функционирования.
IV. Заключение
На основе системного анализа технологических процессов весового контроля в рамках CALS-технологий проведено исследование концептуальной, программной и вычислительной моделей автоматизированной системы весового контроля нового поколения, которая разрабатывается с целью обеспечения математическими моделями и электронной документацией всего жизненного цикла самолётов и вертолетов гражданской авиации и, прежде всего, для решения задач управления весом изделия.
Проведены анализ и формализация программной архитектуры АСВК, выделены базовые программные компоненты. Предложена 3-уровневая логическая структура системы на основе веб-портала предприятия. Описаны принципы организации потоков и хранения истории изменений в изделии. Разработана структура модуля для расчёта центровки и массовоинерционных характеристик изделия и любых его компонентов.
Предложена архитектура информационного хранилища АСВК. Дано описание ядра системы, серверного ASP.NET потока АСВК и структуры портала. С использованием портальной технологии Microsoft Sharepoint разработан программный прототип системы, обеспечивающий автоматизированную обработку потоков информации на основе заявок в задачах весового контроля. Прототип предоставляет интерфейс для работы с базой знаний организации путём вовлечения персонала в информационную среду с совместным доступом.
Разработанные структуры и прототип АСВК нового поколения являются системным заделом и существенным вкладом в совершенствование весовой отдачи перспективных самолётов и вертолетов гражданской авиации, повышение конкурентоспособности, информационной и технологической культуры на всех этапах ЖЦ сложных изделий авиастроения и машиностроения.
