Итерационные методы статического анализа двухдроссельной электрогидравлической рулевой машины ракетных блоков

Автор: Белоногов Олег Борисович
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Роботы, мехатроника и робототехнические системы
Статья в выпуске: 2 (21), 2018 года.
Бесплатный доступ
Статья содержит результаты разработки и исследования итерационных методов статического анализа двухдроссельной электрогидравлической рулевой машины, а именно - методов расчета ее статических характеристик (силовой и скоростной) с учетом параметров местных гидравлических сопротивлений, позволяющих проводить расчеты при различных значениях напряжения питания и температуры с заданной погрешностью вычислений и за минимальное время. Предлагаемые методы основаны на решении систем нелинейных алгебраических и трансцендентных уравнений математических моделей рулевой машины, описывающих ее статические режимы работы. В основу разработки методов статического анализа рулевой машины положены методы комплексного моделирования физических свойств рабочих жидкостей рулевых машин и гидроприводов, итерационные методы расчета параметров течений рабочей жидкости в соединительных трубопроводах, каналах, проточных элементах и клапанах, результаты исследования рабочих процессов составляющих элементов рулевой машины, а также модификация метода Зейделя для решения систем нелинейных алгебраических и трансцендентных уравнений. Приводятся результаты апробации разработанных итерационных методов статического анализа такой рулевой машины.
Статический анализ, электр о гидравлическая рулевая машина, нелинейные алгебраические и трансцендентные уравнения
Короткий адрес: https://sciup.org/143166675
IDR: 143166675 | УДК: 517.538.7:621.45.054-523.3
Techniques for iterative static analysis of a double-orifice electrohydraulic steering actuator of rocket stages
The paper discusses the results of development and studies of iterative techniques of static analysis of double-orifice electrohydraulic steering actuator, namely, techniques for analyzing its static (force and velocity) characteristics taking into account parameters of local hydraulic resistances, allowing performing calculations at various supply voltages and temperatures to within a specified computational error and for a minimal amount of time. The proposed techniques are based on solving systems of non-linear algebraic and transcendental equations of math models of the steering actuator describing its static operational modes. Taken as a basis for development of techniques for static analysis of the steering actuator are methods of integrated simulation of physical properties of working fluids of steering actuators and hydraulic drives, iterative methods for calculating parameters of working fluids flow in connecting lines, channels, flow-through elements and valves, results of studies of operating processes for steering actuator constituent elements, as well as a modification of the Seidel method for solving a system of non-linear algebraic and transcendental equations. The paper provides the results of testing the developed static analysis iterative techniques of such steering actuator.
Текст научной статьи Итерационные методы статического анализа двухдроссельной электрогидравлической рулевой машины ракетных блоков
Рациональный выбор значений параметров электрогидравлических рулевых машин (РМ) [1, 2], получивших широкое распространение в системах управления космических блоков, может быть достигнут путем параметрической оптимизации, одним из этапов которой является проведение статического анализа.
Составляющими элементами статического анализа РМ являются методы расчета ее статических характеристик, к которым относятся:
-
• семейство скоростных характеристик РМ, т. е. зависимостей линейных (угловых) скоростей движения выходного органа РМ от командного сигнала и суммарной преодолеваемой нагрузки;
-
• силовая (моментная) характеристика РМ, т. е. зависимость усилий или моментов, развиваемых выходным органом РМ, от командного сигнала.
В процессе расчетов статических характеристик вычисляются некоторые дополнительные параметры и зависимости.
Существенное влияние на статические характеристики электрогидравлических РМ оказывают:
-
• напряжение питания электродвигателя РМ;
-
• температура рабочей жидкости РМ;
-
• местные гидравлические сопротивления конструкции РМ и ее электрогид-равлического усилителя (ЭГУ).
Учет указанных факторов при проектировании и оптимизации РМ достаточно сложен и поэтому требует разработки методов расчета статических характеристик РМ, позволяющих учитывать вышеприведенные факторы по их математическим моделям с заданной точностью и за минимальное время.
постановка задачи
В настоящей работе приводятся результаты разработки методов статического анализа варианта автономной однокаскадной электрогидравлической рулевой машины с двухдроссельным ЭГУ с отрицательным перекрытием с дроссельными окнами сегментной формы.
Расчетная схема принятого к рассмотрению варианта РМ представлена на рис. 1, а расчетная схема ее двухдроссельного ЭГУ — на рис. 2.
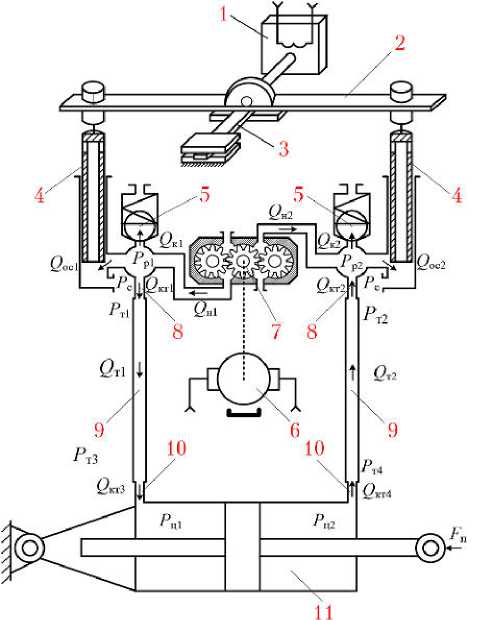
Рис. 1. Схема рулевой машины: 1 — поляризованное реле (электромеханический преобразователь); 2 — коромысло; 3 — плоская нагрузочная пружина; 4 — золотниковый плунжер; 5 — предохранительный клапан; 6 — электродвигатель; 7 — трехшестеренный насос; 8 — входной канал трубопровода; 9 — трубопровод; 10 — выходной канал трубопровода; 11 — силовой гидроцилиндр
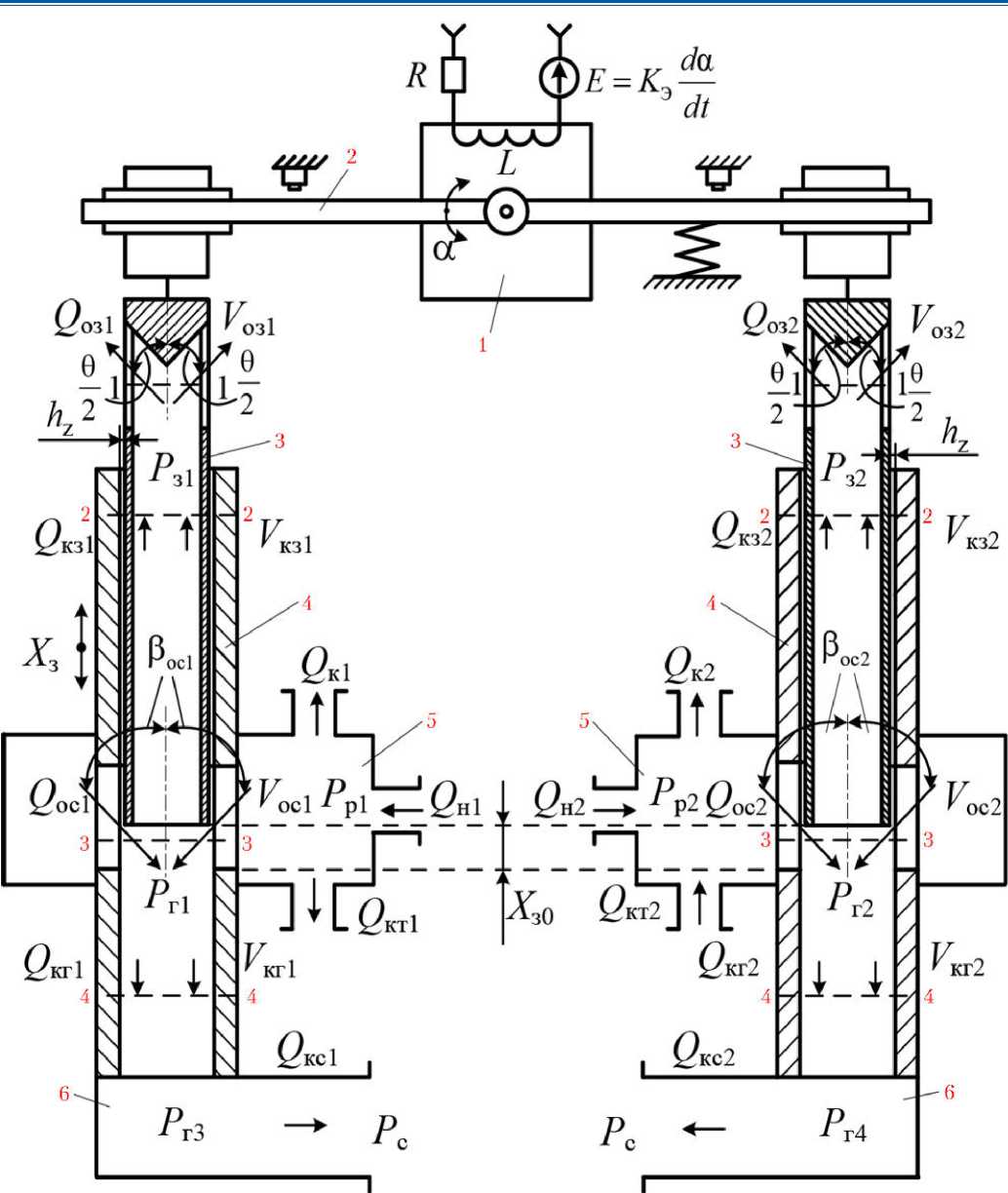
Рис. 2. Схема электрогидравлического усилителя (ЭГУ) рулевой машины: 1 — поляризованное реле (электромеханический преобразователь); 2 — коромысло; 3 — золотниковый плунжер; 4 — вращающаяся ось насоса; 5 — рабочая полость ЭГУ; 6 — канал слива
В основу разработки математических моделей статических режимов работы РМ и методов расчета ее статических характеристик были положены:
-
• методы комплексного моделирования физических свойств рабочих жидкостей, изложенные в работе [3];
-
• итерационные методы расчета параметров течений рабочей жидкости в каналах,
соединительных трубопроводах, проточных элементах и клапанах, представленные в работе [4];
-
• модификация метода Зейделя для решения систем нелинейных алгебраических и трансцендентных уравнений, приведенная в работе [5];
-
• методы расчета статических характеристик автономных однокаскадных РМ
с двухдроссельным ЭГУ с отрицательным перекрытием, изложенные в работах [6, 7];
-
• методы расчета статических характеристик двухдроссельного ЭГУ с отрицательным перекрытием, изложенные в работе [8];
-
• результаты исследований рабочих процессов составляющих РМ, изложенные в работах [9–13].
Математические модели статических режимов работы РМ получают из дифференциальных уравнений динамических режимов работы РМ путем приравнивания к нулю их старших производных.
• уравнения, определяющие угловую скорость вращения вала электродвигателя (вала насоса) и потребляемый электродвигателем ток [8]
K 1 – K 2 K 3 – K 2 K 5 ( р р1 + р р2 ) ;
[1 + K 2 K 4( ρ р1.с ν р1.с + ρ р2.с ν р2.с)]
I = э
K 3 + K 1 K 4( ρ р1.с ν р1.с+ ρ р2.с ν р2.с) ω + K 5( р р1+ р р2)
[1 + K 2 K 4( ρ р1.с ν р1.с + ρ р2.с ν р2.с)]
, (4)
математическая модель статического режима работы и метод расчета силовой характеристики рулевой машины
Под силовой характеристикой РМ понимается зависимость усилия, развиваемого силовым гидроцилиндром РМ, от командного тока. Силовую характеристику РМ определяют при условии предположения о заторможенном поршне силового гидроцилиндра, которое выражается соотношениями:
п = 0; Q кт1 = Q т1 = Q кт3 = Q кт4 = Q т2 = Q кт2
р р1 = р т1 = р т3 = р ц1; р р2 = р т2 = р т4 = р ц2, где р р1, р р2 — давления в рабочих полостях ЭГУ РМ; Q кт1 – Q кт4; Q т1, Q т2 — расходы через каналы и трубопроводы.
Математическая модель статического режима работы для расчета силовой характеристики включает:
• уравнение линейного перемещения золотникового плунжера [8]
X з = a 1 I к – a 2 – a 3 F г , (1)
где X з — перемещение золотникового плунжера; F г — гидравлическая сила, действующая на золотниковые плунжеры; а 1… а 3 — постоянные коэффициенты, определяе мы е как а 1 = ( K M R a )/ K мп ; а 2 = ( М стд R a )/ K М п ; а 3 = R 2 / K Мп, здесь K M i — коэффициент моментной характеристики электромеханического преобразователя (ЭМП); М стд — момент сухого трения движения, приведенный к валику ЭМП; K МП — коэффициент позиционного момента от плоской нагрузочной пружины; R а — плечо коромысла.
На перемещение золотникового плунжера накладывается ограничение [8]
| X з| ≤ X зmax, (2)
где X зmax — максимальное перемещение золотникового плунжера.
где ю — угловая скорость вращения вала электродвигателя; I э — потребляемый электродвигателем ток; K 1… K 8 — здесь и далее постоянные коэффициенты, определяемые как K 1 = U э / K ээ ; K 2 = R э / K ээ ; K 3 = ( M стэ + M стн )/ K мэ ;
K 4 = [ C ж bm 2( z + 1)]/(2 K мэ);
K 5 = [( Cf + 1) bm 2( z + 1)]/ K мэ; K 6 = bm 2( z + 1) – Cn ; K 7 = Cрbm 2( z + 1); K 8 = n о 2,
где U э — напряжение питания электродвигателя; R э — активное сопротивление якорной цепи электродвигателя, определяемое как R э = R э0 + Ktt , здесь R э0 — значение активного сопротивления якорной цепи при 20 ° С; K t — температурный коэффициент; t — температура, ° С; K ээ — коэффициент электромагнитной скоростной связи электродвигателя; K мэ — коэффициент моментной характеристики электродвигателя; M стэ — момент сухого трения движения в электродвигателе; M стн — момент сухого трения движения в насосе; C ж — коэффициент жидкостного вязкого трения; Cf — коэффициент сухого трения, обусловленного давлением рабочей жидкости; b — ширина зубчатого венца шестерни насоса; m — модуль зацепления; z — количество зубьев шестерни насоса; Cn — коэффициент утечек, зависящих от скорости вращения вала насоса; Cp — коэффициент утечек, зависящих от перепада давления; Р р1 . , р р 2с — средние значения плотности рабочей жидкости в зазорах предохранительных клапанов; у р1с, у р2с — средние значения кинематической вязкости рабочей жидкости в зазорах предохранительных клапанов;
• уравнения давлений в рабочих полостях ЭГУ [8]
Р pl = a 4 - Р p2 - a 5[1 + a б ( Р р1.Л1.с + Р р2.с У р2.с ) ] X
Х ( Р р1Л1.с ) " 1 Р p1
- a 7[1 + a 6( Р
р1.с ^ р1.с
+ Р
р2.с р2.с)] X
X ^ ос1 5 ос1 ^ 1/ Р р1.г1 ^pl - P Г1 1 sig n( P p1 - Р Г1 ) -
- a 8[1 + a 6( Р р1.сVр1.с + Р р2.сур2.с)] Q к 1 ; (5)
-
p p2 = a 4 – p p1 – a 5[1 + a 6( ρ р1.с ν р1.с + ρ р2.с ν р2.с)] × × ( ρ р2.с ν р2.с)–1pp22 – a 7[1 + a 6( ρ р1.с ν р1.с + ρ р2.с ν р2.с)] ×
× µ ос2 S ос2 1/ ρ р2.г2 | p p2 – p г2|sign( p p2 – p г2) –
– a 8[1 + a 6( ρ р1.с ν р1.с + ρ р2.с ν р2.с)] Q к2, (6) где p г1, p г2 — давления в полостях начала каналов гильз; Q к1, Q к2 — расходы рабочей жидкости через предохранительные клапаны; a 4… a 8 — постоянные коэффициенты, определяемые как а 4 = ( K 1 – K 2 K 3)/( K 2 K 5); а 5 = K 7/( K 2 K 5 K 6); а 6 = K 2 K 4; а 7 = K 8/( K 2 K 5 K 6); а 8 = 1/( K 2 K 5 K 6);
-
• уравнение гидростатической силы, действующей на золотниковые плунжеры [8]
F гс = а 9( p г1 – p г2) + а 10( p з1 – p з2), (7)
где p з1, p з2 — давления в камерах золотниковых плунжеров; а 9, а 10 — постоянные коэффициенты, определяемые как а 9 = S т1; а 10 = S т2, здесь S т1, S т2 — площади внешней и внутренней торцевых поверхностей золотникового плунжера;
-
• уравнение стационарной гидродинамической силы [8]
F гдс = ( p г1 – p г3)/ ( а 11 + а 12 λ кг1) –
– ( p г1 – p з1)/( а 13 + а 14 λ кз1) – ( p г2 – p г4)/( а 11 + а 12 λ кг2) +
+ ( p г2 – p з2)/( а 13 + а 14 λ кз2) + [ а 17 µ 2оз1( p з1 – p с)]/ ε оз1 –
– [ а 17 µ 2оз2( p з2 – p с)]/ ε оз2 – [ а 18 µ 2 ос1 S ос1( p р1 – p г1) ×
× cos( β ос1)]/ ε ос1 – [ а 18 µ 2 ос2 S ос2( p р2 – p г2) ×
× cos( β ос2)]/ ε ос2 (8)
где p г3, p г4 — давления в полостях перед каналами слива; λ кг1, λ кг2, λ кз1, λ кз2 — коэффициенты гидравлических потерь на трение по длине, соответственно, каналов гильз и каналов золотниковых плунжеров, определяемые в соответствии с работой [8] выражениями, которые удобно представить следующими функциональными зависимостями [4]
λ кг1 = λ к( p г1, p г3, ρ г1.г3, ν г1.г3, d кг, l кг, η кг, ξ кг.1, …, ξ кг. n ); (9)
λ кг2 = λ к( p г2, p г4, ρ г2.г4, ν г2.г4, d кг, l кг, η кг, ξ кг.1, …, ξ кг. n ); (10)
λ кз1 = λ к( p г1, p з1, ρ г1.з1, ν г1.з1, d кз, l кз, η кз, ξ кз.1, …, ξ кз. n ); (11)
λ кз2 = λ к( p г2, p з2, ρ г2.з2, ν г2.з2, d кз, l кз, η кз, ξ кз.1, …, ξ кз. n ), (12)
здесь ρ г1.г3, ρ г2.г4 — средние значения плотностей в полостях каналов гильз; ν , г1.г3
ν г2.г4 — средние значения кинематической вязкости в полостях каналов гильз; ρ г1.з1, ρ г2.з2 — средние значения плотностей в полостях каналов золотниковых плунжеров; ν г1.з1, ν г2.з2 — средние значения кинематической вязкости в полостях каналов золотниковых плунжеров; η кг, η кз — относительные шероховатости внутренних поверхностей каналов гильз и каналов золотниковых плунжеров, соответственно; ξ кг.1, …, ξ кг. n , ξ кз.1, …, ξ кз. n — характерные изменения параметров русла каналов гильз и каналов золотниковых плунжеров; l кг, l кз — длины каналов гильз и каналов золотников, соответственно; d кг, d кз — диаметры каналов гильз и каналов золотниковых плунжеров, соответственно; µ оз1, µ оз2, ε оз1, ε оз2 — соответственно, коэффициенты расхода отверстий в золотниковом плунжере и коэффициенты сжатия потоков в отверстиях золотниковых плунжеров, определяемые выражениями, приведенными в работе [8], которые удобно представить в виде следующих функциональных зависимостей:
µ оз1 = µ оз( р з1, р с, ρ з1.с, ν з1.с, S оз, Поз); (13) µ оз2 = µ оз( р з2, р с, ρ з2.с, ν з2.с, S оз, Поз); (14) ε оз1 = ε оз( р з1, р с, ρ з1.с, ν з1.с, S оз, Поз); (15) ε оз2 = ε оз( р з2, р с, ρ з2.с, ν з2.с, S оз, Поз), (16)
здесь ρ з1.с, ρ з2.с — средние значения плотности рабочей жидкости в отверстиях золотниковых плунжеров; ν з1.с, ν з2.с — средние значения кинематической вязкости рабочей жидкости в отверстиях золотниковых плунжеров; S оз — площадь проходного сечения отверстия в золотниковом плунжере, определяемая как S оз = π d 2оз /4; Поз = π d оз — смоченный периметр отверстия в золотниковом плунжере; µ ос1, µ ос2 — коэффициенты расхода сегментных дроссельных окон, определяемые выражениями, приведенными в работе [11], которые удобно представить в виде следующих функциональных зависимостей:
µ ос1 = µ ос1( р р1, р г1, ρ р1.г1
ν р1.г1, ос1, ос1, ос1, ξ ос1 ;
µ ос2 = µ ос2( р р2, р г2, ρ р2.г2, ν р2.г2, S ос2, Пос2, δ ос2, ξ ос2), (18)
где S ос1, S ос2 — площади проходных сечений дроссельных окон сегментной формы, определяемые выражениями [6]:
S ос1 = 0 при ( Х з0 – Х з ) ≤ 0,
S ос1 = S з + ( d о 2/4)arctg [ d о /( d о – 2 X з0 + 2 X з )]2 – 1 –[( d о – 2 X з0 + 2 X з )2/4] [ d о /
о
– 2 X з0 + 2 X з )]2 – 1
при 0 < ( X з0 – X з ) ≤ d о / 2;
S ос2 = 0 при ( Х з0 + Х з ) ≤ 0,
S ос2 = S з + ( d о 2/4)arctg [ d о /( d о – 2 X з0 – 2 X з )]2 – 1 –[( d о – 2 X з0 – 2 X з )2/4] [ d о /(d о – 2 X з0 – 2 X з )]2 – 1
при 0 < ( X з0 + X з) ≤ d о /2;
здесь и далее Xз0 — начальное открытие дроссельных окон сегментной формы; dо — диаметр окнообразующих отверстий в гильзе; Sз — остаточная площадь проходного сечения при полностью перекрытом сегментном дроссельном окне; Пос1, Пос2 — смоченные периметры сегментных дроссельных окон, определяемые выражениями [7]:
П ос1 = 0 при ( Х з0 – Х з ) ≤ 0,
П ос1 = П з + d о arctg ( d о2 /4) + [( d о /2) – X з0 + X з ] 2 + 2 ( d о 2/4) + [( d о /2) – X з0 + X з ]2 (21)
ос1 з о (dо/2) – Xз0 + Xз о о з0 з при 0 < (Xз0 – Xз) ≤ dо/2;
П ос2 = 0 при ( Х з0 + Х з ) ≤ 0,
П = П + d arctg ( d о2 /4) + [( d о /2) – X з0 – X з ] 2 +2 ( d 2/4) + [( d /2) – X – X ]2 (22)
ос2 з о (d /2) – X – X о о з0 з о / з0 з при 0 < (Xз0 + Xз) ≤ dо/2, где Пз — значение смоченного периметра при полностью перекрытом сегментном дроссельном окне; δос1, δос2, ξос1, ξос2 — безразмерные параметры движущихся дроссельных окон и потоков в них, определяемые выражениями [8, 11]:
5 ос1
__________________ D г2 — D Г 1 _______________. 2{[ d o ( Х зО — Х) — ( Х зО — Х з )Т + 0,25Пз} ’
δ
ос2
D г2 – D г1
2{[ d э( Х зо + Х з ) — ( Х зо + Х з )2]0 ' 5 + 0,25П з };
ξ ос1
ω n o S ос1 ε oc1( D г1 + D г2) ;
ω n o S ос2 ε oc2( D г1 + D г2)
, 4 Q ос2
где D г1, D г2 — внутренний и внешний метры гильзы, соответственно; ε ос1, ε ос2 — коэф
ос2
диа-
фициенты сжатия потоков в сегментных дроссельных окнах, определяемые выражениями, приведенными в работах [8, 11], которые удобно представить в виде следующих функциональных зависимостей:
ε ос1 = ε ос1( р р1, р г1, ρ р1.г1, ν р1.г1, S ос1, П ос1, δ ос1, ξ ос1); (27)
ε ос2 = ε ос2( р р2, р г2, ρ р2.г2, ν р2.г2, S ос2, П ос2, δ ос2, ξ ос2), (28)
где Q ос1, Q ос2 — расходы рабочей жидкости, протекающей через дроссельные окна сегментной формы, определяемые выражениями [8, 11]
Q ос1 = n о µ ос1 S ос1 2/ ρ р1.г1 | p p1 – p г1| s i gn ( р р1 – р г1); (29)
Q ос2 = n о µ ос2 S ос2 2/ ρ р2.г2 | p p2 – p г2| s i gn ( р р2 – р г2), (30)
здесь n о — количество дроссельных окон в гильзе; β ос1, β ос2 — углы истечения потоков рабочей жидкости в сечениях сегментных дроссельных окон золотникового гидрораспределителя, определяемые выражениями, которые удобно представить в виде следующих функциональных зависимостей [8, 11]
βос1 = βос1(χос1, δос1, ξос1, hz, Reос1);(31)
βос2 = βос2(χос2, δос2, ξос2, h–z, Reос2),(32)
здесь χ ос1, χ ос2 — относительные открытия дроссельных окон, определяемые выражениями [8, 11]:
χос1 = (Хз0 – Хз)/hz;(33)
χос2 = (Хз0 + Хз)/hz,(34)
где hz — значение зазора меж–ду золотниковым плунжером и гильзой; hz — значение относительного зазора между золотником и гильзой, определяемое выражением [8, 11]
hz = hz / D г1; Reос1, Reос2 — числа Рейнольдса потоков в сегментных дроссельных окнах, определяемые выражениями, приведенными в работах [8, 11], которые удобно представить функциональными зависимостями Reос1 = Re( р р1, р г1, ρ р1.г1, ν р1.г1, S ос1, Пос1, δ ос1, ξ ос1); (35)
Reос2 = Re( р р2, р г2, ρ р2.г2, ν р2.г2, S ос2, Пос2, δ ос2, ξ ос2); (36)
а11…а16 — постоянные коэффициенты, опреде-n ляемые как а„ = У£ ,/(2S2 ); а - l /(2d S );
11 ^^~кг. кг 12 кг кг кг i 1
n a 13 - S.„ /(2StX а 14 - l„/<'d„SJ: а 15 = i = 1
nn
= 2mозSозcos(θ/2); а16 = 2nо, здесь ∑ζкг.i, ∑ζкз.i — i = 1 i = 1
суммы коэффициентов местных гидравлических сопротивлений, обусловленных изменениями параметров русла каналов гильз и каналов золотниковых плунжеров, соответственно;
-
• уравнение гидравлической силы, действующей на золотниковые плунжеры
F г = F гс + F гдс ; (37)
-
• уравнения давлений в камерах никовых плунжеров [8]
р = р а 17(1/ µ 2 оз1) ρ з1.с
-
з1 г1 ( а 13+ а 14 λ кз1) ρ г1.з1 + а 17(1/ µ 2 оз1) ρ з1.с
золот-
а17(1/µ2оз2)ρз2.с р2 = р2
( а 13 + а 14 λ кз2) ρ г2.з2 + а 17(1/ µ оз2) ρ з2.
; (38)
где а 17 = 1/(2 m 2 оз S 2оз) — постоянный коэффициент;
• уравнения давлений в полостях начала каналов гильз [8]
р г1 = р р1/ 1 + а 18[ ρ р1.г1/( µ 2 ос1 S 2ос1)] ×
× 1/ ( а 11 + а 12 λ кг1) ρ г1.г3 + ( а 19 + а 20 λ кс1) ρ г3.с +
+ 1/ ( а 13 + а 14 λ кз1) ρ г1.з1 + а 17( ρ з1.с/ µ 2 оз1) 2 ; (40)
р г2 = р р2/ 1 + а 18[ ρ р2.г2/( µ 2 ос2 S 2ос2)] × × 1/ ( а 11 + а 12 λ кг2) ρ г2.г4 + ( а 19 + а 20 λ кс2) ρ г4.с + + [ 1/ ^ ( а 13 + а 14 ^- з 2) р г2.з2 + а 17( р з2.с / ^ оз2)] } ^ (41)
а18…а20 — постоянные коэффициенты, опре-n деляемые как а18 = 1/(2n2о); а19 = ∑ζкс.i/(2Sк2с);
i = 1
n а20 = lкс /(2aксS2кс), здесь ∑ζкс.i — сумма коэф-
• уравнения давлений в полостях перед каналами слива [8]
р г3 = р г1 ( а 19 + а 20 λ кс1) ρ г3.с ; (42)
(а11 + а12λкг1)ρг1.г3 + (а19 + а20λкс1)ρг3.с р = р (а19 + а20λкс2)ρг4.с ; (43)
г г ( а + а λ ) ρ + ( а + а λ ) ρ
11 12 кг2 г2.г4 19 20 кс2 г4.с
-
• уравнения перемещений затворов предохранительных клапанов [7]
Y к1 = [ а 21 – а 22( µ 2 к1 S к1/ ε к1) + а 23 µ 2 к1 S 2к1] р р1 – а 24; (44)
Y к2 = [ а 21 – а 22( µ 2 к2 S к2/ ε к2) + а 23 µ 2 к2 S 2к2] р р2 – а 24, (45)
где ε к1, ε к2 — коэффициенты сжатия потоков в клапанах, как и коэффициенты расходов, определяемые в соответствии с работой [12] системами уравнений, которые удобно представить функциональными зависимостями:
ε к1 = ε к( р р1, р с, ρ р1.с, ν р1.с, S к1, Y к1); (46)
ε к2 = ε к( р р2, р с, ρ р2.с, ν р2.с, S к2, Y к2); (47)
µ к1, µ к2 — коэффициенты расхода предохранительных клапанов, определяемые в соответствии с работой [12] системами уравнений, которые удобно представить функциональными зависимостями:
µк1 = µк(рр1, рс, ρр1.с, νр1.с, Sк1, Yк1);(48)
µ к2 = µ к( р р2, р с, ρ р2.с, ν р2.с, S к2, Y к2). (49) На перемещения затворов предохранительных клапанов налагаются ограничения [7]
0 ≤ |Yк1| ≤ Yкmax;(50)
0 ≤ |Yк2| ≤ Yкmax,(51)
здесь Y кmax — максимальное перемещение затвора предохранительного клапана; S к1, S к2 — площади проходных сечений предохранительных клапанов, определяемые выражениями [12]:
S к1 = { π Y к1sin( Θ )[ d ш + Y к1sin( Θ /2)]}/2; (52)
S к2 = { π Y к2sin( Θ )[ d ш + Y к2sin( Θ /2)]}/2, (53)
где Y к1, Y к2 — перемещения затворов клапанов; Θ — угол конусности седла клапана; d ш — диаметр шарика затвора клапана; а 21… а 24 — постоянные коэффициенты, определяемые как а 21 = π d 2к/4 K п; а 22 = [2cos( Θ /2)]/ K п; а 23 = 8/( π d 2 к K п); а 24 = h 0, здесь K п — коэффициент упругости пружины клапана; d к — диаметр подводной магистрали клапана; h 0 — начальное поджатие пружины клапана;
-
• уравнения расходов рабочей жидкости, протекающей через предохранительные клапаны [12]
Q к1 = µ к1 S к1 2/ ρ р1.c p p1; (54)
Q к2 = µ к2 S к2 2/ ρ р 2.c p p2 ; (55)
-
• уравнения плотности и кинематической вязкости рабочей жидкости в полостях ЭГУ РМ, которые в соответствии с работой [3] можно определить следующими функциональными зависимостями:
ρ р1 = ρ ( t , р р1); ρ р2 = ρ ( t , р р2);
ρ г1 = ρ ( t , р г1); ρ г2 = ρ ( t , р г2);
ρ г3 = ρ ( t , р г3); ρ г4 = ρ ( t , р г4);
ρ з1 = ρ ( t , р з1); ρ з2 = ρ ( t , р з2); ρ с = ρ ( t , р с); (56)
/ ν
р1
= ν ( t , р р1); ν р2 = ν ( t , р р2);
ν г1 = ν ( t , р г1); ν г2 = ν ( t , р г2); ν г3 = ν ( t , р г3); ν г4 = ν ( t , р г4);
ν з1 = ν ( t , р з1); ν з2 = ν ( t , р з2); ν с = ν ( t , р с), (57)
а их средние значения — выражениями [8]
ρ р1.с = ( ρ р1 + ρ с)/2; ρ р2.с = ( ρ р2 + ρ с)/2;
ρ р1.г1 = ( ρ р1 + ρ г1)/2; ρ р2.г2 = ( ρ р2 + ρ г2)/2;
ρ г1.з1 = ( ρ г1 + ρ з1)/2; ρ г2.з2 = ( ρ г2 + ρ з2)/2;
ρ г1.г3 = ( ρ г1 + ρ г3)/2; ρ г2.г4 = ( ρ г2 + ρ г4)/2;
ρ з1.с = ( ρ з1 + ρ с)/2; ρ з2.с = ( ρ з2 + ρ с)/2;
ρ г3.с = ( ρ г3 + ρ с )/2; ρ г4.с = ( ρ г4 + ρ с )/2; (58)
золотникового плунжера (1) с учетом (2), перемещения затворов клапанов (44), (45) с учетом (50), (51), а также давлений в узловых точках — в рабочих полостях ЭГУ РМ (5), (6) и полостях начала каналов гильз (40), (41) — методом, изложенным в работе [5], при изменении командного тока I к от нуля до I к.max с шагом hi , с последующим вычислением усилия F , развиваемого силовым гидроцилиндром РМ, по выражению
F = S п ( р р1 – р р2 ) – F п – F тр , (60)
где F тр — сила сухого трения в силовом гидроцилиндре РМ; F п — противодействующая нагрузка на штоке силового гидроцилиндра РМ.
При этом на каждой итерации вычисляются параметры по уравнениям (3), (4), (7)–(39), (42), (43), (46)–(49), (52)–(55), а перед входом в итерационный процесс при каждом новом значении командного тока I к вычисляются значения плотности и кинематической вязкости рабочей жидкости в полостях ЭГУ РМ по выражениям (56), (57) и их средние значения — по выражениям (58), (59).
При отрицательных вычисляемых значениях усилия F , развиваемого силовым гидроцилиндром РМ, они обнуляются.
Здесь и далее при входе в итерационный процесс на каждом следующем шаге по командному току в качестве начальных значений вычисляемых параметров используются значения этих параметров, полученные на предыдущем шаге.
ν р1.с = ( ν р1 + ν с)/2; ν р2.с = ( ν р2 + ν с)/2;
ν р1.г1
ν г1.з1
ν г1.г3
( ν р1 + ν г1)/2; ν р2.г2
( ν г1 + ν з1)/2; ν
( ν г1 + ν г3)/2; ν
г2.з2
г2.г4
( ν р2 + ν г2 )/2;
( ν г2 + ν з2)/2;
( ν г2 + ν г4)/2;
математическая модель статического режима работы и метод расчета скоростной характеристики рулевой машины
ν з1.с = ( ν з1 + ν с)/2; ν з2.с = ( ν з2 + ν с)/2;
ν г3.с = ( ν г3 + ν с)/2; ν г4.с = ( ν г4 + ν с)/2, (59)
\
где t — температура рабочей жидкости; р 1, р 2 — давления в рабочих полостях ЭрГУ; р р2г1, р г2, р г3, р г4 — давления в полостях гильз ЭГУ; р з1, р з2 — давления в полостях золотников; р с — давление в полости слива ( р с = 0).
Метод расчета силовой характеристики РМ с двухдроссельным ЭГУ заключается
Под скоростной характеристикой РМ понимается зависимость скорости движения ее выходного органа под нагрузкой от командного тока. Скоростную характеристику РМ определяют из условия предположения о неразрывности потоков, из которого следует, что [7]
Q кт1

1 = Q кт3
Q кт4
т2
в последовательном решении системы нелинейных алгебраических и трансцендентных уравнений, определяющих перемещение
где Q т — обобщенный расход рабочей жидкости между рабочими полостями ЭГУ РМ; Q кт1 , Q кт2 , Q кт3 , Q кт4 , Q т1 , Q т2 — расходы рабочей жидкости через, соответственно, каналы трубопроводов и сами трубопроводы.
Математическая модель статического режима работы для расчета скоростной
характеристики включает уравнения (1)–(4), (7)–(59), а также:
-
• уравнения падений давления по длине комплексных трубопроводов [7]
∆ р 1 = ∆ р кт1 + ∆ р т1 + ∆ р кт3; (61)
∆ р 2 = ∆ р кт2 + ∆ р т2 + ∆ р кт4, (62)
здесь ∆ р кт1, ∆ р кт2 — падения давлений по длине входных каналов трубопроводов; ∆ р кт3, ∆ р кт4 — падения давлений по длине выходных каналов трубопроводов; ∆ р т1, ∆ р т2 — падения давлений по длине трубопроводов;
-
• уравнения падений давлений по длине каналов и трубопроводов [7]
∆ркт1 = (а25 + а26λкт1)ρр1.т1Qт2;(63)
∆рт1 = (а27 + а28λт1)ρр1.т3Qт2;(64)
∆ркт3 = (а25 + а26λкт3)ρт3.ц1Qт2;(65)
∆ркт4 = (а25 + а26λкт4)ρт4.ц2Qт2;(66)
∆рт2 = (а27 + а28λт2)ρт2.т4Qт2;(67)
∆ркт2 = (а25 + а26λкт2)ρт4.ц2Qт2,(68)
здесь λ кт1, λ кт2, λ кт3, λ кт4, λ т1, λ т2 — коэффициенты гидравлических потерь на трение по длине, соответственно, каналов трубопроводов и самих трубопроводов, определяемые в соответствии с работами [4, 7] функциональными зависимостями:
λкт1 = λк ( p р1 , p т1 , ρр1.т1 , νр1.т1 , d кт , l кт , ηкт , ξкт.1 , …, ξкт. n ); (69)
λ кт2 = λ к( p т2, p р2, ρ р2.т2, ν р2.т2, d кт, l кт, η кт, ξ кт.1, …, ξ кт. n ); (70) λ т1 = λ т( p т1, p т3, ρ т1.т3, ν т1.т3, d т, l т, η т, ξ т.1, …, ξ т. n ); (71) λ т2 = λ т( p т4, p т2, ρ т2.т4, ν т2.т4, d т, l т, η т, ξ т.1, …, ξ т. n ); (72) λ кт3 = λ к( p т3, p ц1, ρ т3.ц1, ν т3.ц1, d кт, l кт, h кт, ξ кт.1, …, ξ кт. n ); (73) λ кт4 = λ к( p ц2, p т4, ρ т4.ц2, ν т4.ц2, d кт, l кт, h кт, ξ кт.1, …, ξ кт. n ), (74)
где η кт, η т — относительные шероховатости внутренних поверхностей каналов трубопроводов и самих трубопроводов; ξ кт.1, …, ξ кт. n , ξ т.1, …, ξ т. n — характерные изменения параметров русла каналов трубопроводов и самих трубопроводов;
-
• уравнение скорости движения поршня РМ [7]
V п = |( a 29/ K квт)( р р1 – р р2) – ( a 30/ K квт)| ×
× sign[( a 29/ K квт)( р р1 – р р2) – ( a 30/ K квт)], (75)
где K квт — коэффициент квадратичного вязкого трения, приведенного к поршню силового гидроцилиндра РМ, определяемого как [7]
K квт = [( а 25 + а 26 λ кт1) ρ р1.т1 + ( а 27 + а 28 λ т1) ρ т1.т3 +
+ ( а 25 + а 26 λ кт1) ρ т3.ц1 + ( а 25 + а 26 λ кт1) ρ т4.ц2 +
+ (а27 + а28λт1)ρт2.т4 + (а27 + а28λт1)ρр2.т2]Sп3,(76)
здесь а25…а30 — постоянные коэффици-n енты, определяемые как а25 = ^Zkt//(2^Кт);
1'
n а26 = l.№dкт52кт); a27 - Zz„ /(2S^, г = 1
а28 = lт /(2dтSт2); а29 = Sп; а30 = Fтр + Fп, nn где ∑ζкт i, ∑ζтi — суммы, соответственно, i = 1 . i = 1
коэффициентов местных гидравлических сопротивлений, обусловленных изменениями параметров русла каналов трубопроводов и самих трубопроводов; l кт, l т — длины, соответственно, каналов трубопроводов и самих трубопроводов; d кт, d т — диаметры, соответственно, каналов трубопроводов и самих трубопроводов, где F тр — сила сухого трения в силовом гидроцилиндре РМ; F п — противодействующая нагрузка на штоке силового гидроцилиндра РМ; S п — эффективная площадь поршня силового гидроцилиндра РМ, определяемая как
S = π ( d2 – d2), п пш здесь dп — диаметр поршня силового гидроцилиндра; dш — диаметр штока силового гидроцилиндра;
-
• уравнения давлений в полостях трубопроводов и силового гидроцилиндра [7]
р т1 = рр1 – (а21 + а22λкт1)ρр1.т1Qт2sign(Qт);(77)
рт3 = рт1 – (а23 + а24λт1)ρт1.т3Qт2sign(Qт);(78)
р т2 = р р2 + ( а 21 + а 22 λ кт2) ρ р2.т2 Q т2sign( Q т); (79) р т4 = р т2 + ( а 23 + а 24 λ т2) ρ т2.т4 Q т2sign( Q т); (80)
рц1 = рр1 – ∆р1;(81)
рц2 = рр2 – ∆р2;(82)
-
• уравнение расхода через комплексный трубопровод [7]
Qт = SпVп;(83)
-
• уравнения давлений в рабочих полостях ЭГУ РМ [7]
p p1 = a 4 – p p2 – a 5[1 + a 6( ρ р1.с ν р1.с + ρ р2.с ν р2.с)] ×
× ( ρ р1.с ν р1.с) –1 p 2 p1 – a 7[1 + a 6( ρ р1.с ν р1.с + ρ р2.с ν р2.с)] ×
× µ ос1 S ос1 1/ ρ р1.г1 | p p1 – p г1| sign( p p1 – p г1) –
– a 8 [1 + a 6 ( ρ р1.с ν р1.с + ρ р2.с ν р2.с )]( Q к1 + Q т ); (84)
X ( P p2.c V p2.c )—1 P p2 — a 7[1 + a 6( P pLc V pLc + P p2.c V p2.c ) ] X
X Р ос2 5 ос2 VVp PPZ ^ P p2— P J Si gn ( P p2 — P J —
- » 8 [1 + » 6 ( P p1.c V p1.c + P p2.c V p2.c )]( Q k2 — QY ( 85 )
-
• уравнения плотности и кинематической вязкости рабочей жидкости в полостях силового гидроцилиндра РМ и в полостях трубопроводов, которые в соответствии с работой [3] можно определить следующими функциональными зависимостями:
P ml = P ( t , P ml ); P t2 = P ( t , P т2 ) P t3 = P ( t , P тЗ )
P t4 = p ( t , p m4 ); Pm = p ( t , p J;
Pц2 = p( t, р ц2); Pc = p( t, pc);
V m1 = V ( t , P ml ); V t2 = V ( t , P m2 ); V t3 = V ( t , PтЗ^'
-
v t4 = v ( t , р т4 ); Ущ = V ( t , р щ);
-
Уц2 = V(t, Pц2); Vc = V(t, Pc),
и их средние значения — выражениями [7]
P p1.m1
= ( P pi + P t1)/2; P p2.T2 = ( P p2 + P t2)/2;
P t1.t3 ( P t1 + P t3)/2; P t2.t4 ( P t2 + P t4)/2;
Ртз.1 = (Pt3 + Рц1)/2; Pt4.2 = (Pt4 + Рц2)/2;(
-
V pi.T1 = ( V pi + V T1)/2; V
-
V t1.t3 = ( V T1 + V t3)/2; V
= ( V p2 + V t2 )/ 2 ;
= ( V t2 + V m4 )/2;
р2.т2
т2.т4
Vt3.1 = (Vt3 + Vm)/2; Vt4,2 = (Vt4 + Уц2)/2,(89)
где p т1, p т2, p т3, p т4 — давления в полостях трубопроводов; p ц1, p ц2 — давления в полостях силового гидроцилиндра.
Метод расчета скоростной характеристики РМ с двухдроссельным ЭГУ заключается в последовательном решении системы нелинейных алгебраических и трансцендентных уравнений, определяющих:
-
• перемещение золотникового плунжера (1) с учетом (2);
-
• перемещения затворов клапанов (44), (45) с учетом (50), (51);
-
• давления в узловых точках — в рабочих полостях ЭГУ РМ (84), (85) и полостях начала каналов гильз (40), (41);
-
• скорость движения поршня РМ (75) методом, изложенным в работе [5], при изменении командного тока I к от нуля до I к.max с шагом hi .
При этом на каждой итерации вычисляются параметры по уравнениям (3), (4), (7)–(39), (42), (43), (46)–(49), (52)–(55), (61)–(74), (76)–(83), а перед входом в итерационный процесс при каждом новом значении командного тока Iк вычисляются значения плотности и кинематической вязкости рабочей жидкости в полостях ЭГУ РМ по выражениям (56), (57), (86), (87) и их средние значения — по выражениям (58), (59), (88), (89).
При отрицательных вычисляемых значениях скорости поршня силового гидроцилиндра РМ V п они обнуляются.
апробация разработанных методов статического анализа
Результаты вычислительных экспериментов по определению статических характеристик автономной однокаскадной рулевой машины с двухдроссельным ЭГУ с отрицательным перекрытием и дроссельными окнами сегментной формы разгонного блока типа ДМ представлены на рис. 3–7.
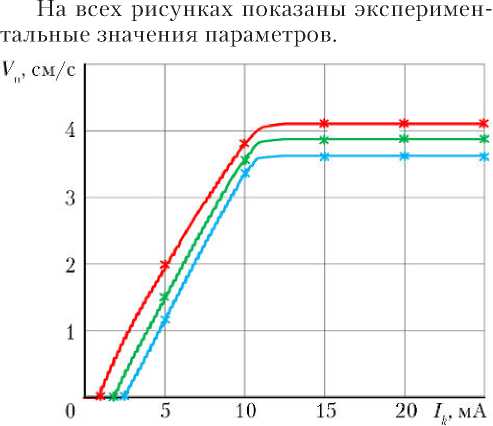
Рис. 3. Семейство скоростных характеристик РМ при противодействующих нагрузках на штоке РМ 0 ( ■ ), 1 000 ( ■ ) и 2 200 Н ( ■ ), напряжении питания 27 В и температуре 20 ° С: линия — расчет; * — эксперимент
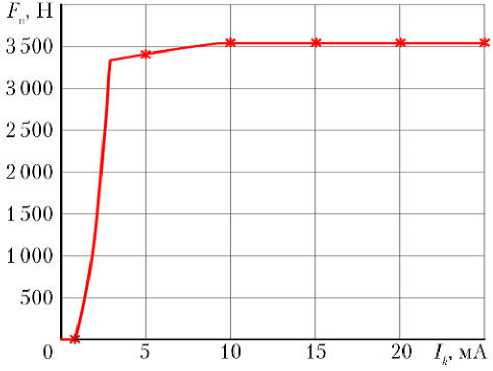
Рис. 4. Силовая характеристика РМ при напряжении питания 27 В и температуре 20 ° С: линия — расчет; * — эксперимент
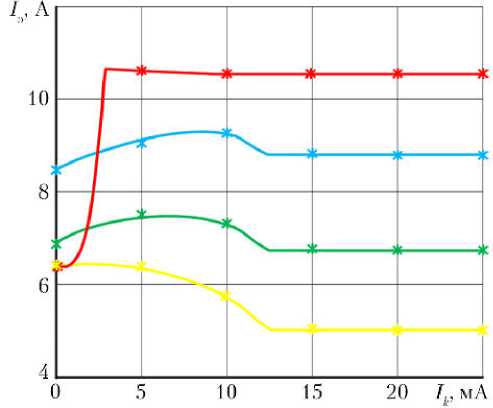
Рис. 5. Семейство зависимостей потребляемого тока РМ при противодействующих нагрузках на штоке РМ 0( — ); 1000( — ) и 2 200 Н ( — ) и заторможенном поршне ( — ) при напряжении питания 27 В, температуре 20 ° С: линия — расчет; * — эксперимент
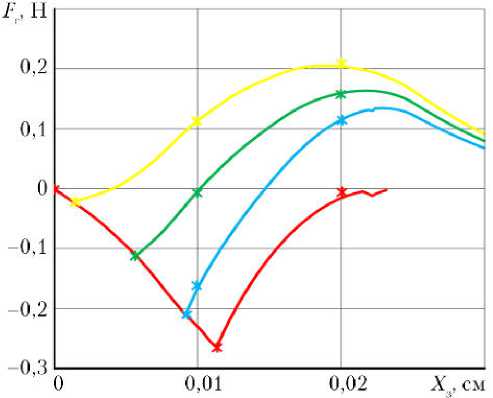
Рис. 6. Семейство зависимостей гидравлической силы, действующей на золотниковые плунжеры ЭГУ РМ, от перемещения золотникового плунжера при противодействующих нагрузках на штоке РМ 0 ( — ); 1 000 ( — ) и 2 200 Н ( — ) и заторможенном поршне ( — ) при напряжении питания
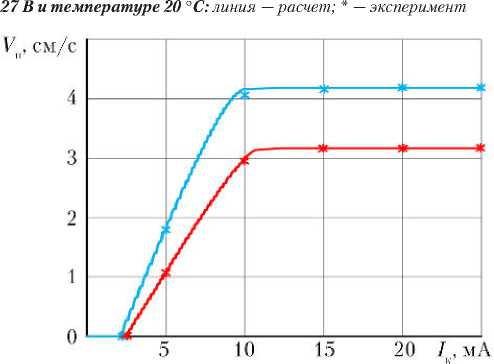
Рис. 7. Скоростные характеристики РМ при противодействующей нагрузке на штоке РМ 1000 Н, напряжении питания 23 В и температуре 50 ° С ( — ) и при напряжении питания 34 В и температуре -50 ° С ( — ): линия — расчет; * — эксперимент
Как видно из рисунков, расчетные графики и данные экспериментов практически совпадают, что указывает на корректность математических моделей, а также высокую точность и эффективность разработанных итерационных методов статического анализа рулевых машин.
заключение
В итоге проведенных разработок и исследований получены следующие основные результаты:
-
• разработаны математические модели статических режимов работы РМ с учетом местных гидравлических сопротивлений каналов и трубопроводов РМ и ее ЭГУ, а также с учетом зависимостей параметров РМ и ее ЭГУ от температуры, обеспечивающие погрешность вычисления характеристик не более 2% по сравнению с математическими моделями без учета указанных параметров и зависимостей, дающими погрешность вычислений до 15%;
-
• разработаны новые итерационные методы статического анализа РМ, включающие методы расчета статических характеристик РМ с учетом местных гидравлических сопротивлений, напряжения питания и температуры с заданной погрешностью вычислений и за минимальное время, и исследована их работоспособность.
Вывод по результатам проведенных в работе исследований: предложенные новые итерационные методы статического анализа РМ, основанные на решении нелинейных алгебраических и трансцендентных уравнений математических моделей статических режимов работы РМ, позволяют проводить расчеты статических характеристик РМ с заданной погрешностью вычислений и за минимальное время в широких диапазонах температур и напряжения питания.
Список литературы Итерационные методы статического анализа двухдроссельной электрогидравлической рулевой машины ракетных блоков
- Белицкий Д.С., Белоногов О.Б., Жарков М.Н. Исполнительные приводы систем управления/Машиностроение. Энциклопедия. Т. IV-22. Ракетно-космическая техника. Кн. 1. Гл. 8.8. М.: Машиностроение, 2012. С. 918-924.
- Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Степан Г.А., Черток Б.Е., Шутенко В.И. Особенности схемно-конструктивных решений и функционирования электрогидравлических рулевых машин ракет (краткий технико-исторический обзор)//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1998. Вып. 3-4. С. 3-25.
- Белоногов О.Б., Жарков М.Н., Кристальный С.Р., Кудрявцев В.В., Шутенко В.И. Моделирование физических свойств рабочих жидкостей рулевых машин и гидроприводов//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1997. Вып. 1. С. 107-117.
- Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Шутенко В.И. Итерационный метод расчета параметров течений рабочей жидкости в соединительных трубопроводах, каналах, проточных элементах и клапанах//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1997. Вып. 1. С. 97-106.
- Белоногов О.Б., Жарков М.Н. Модификация метода Зейделя для расчета статических характеристик рулевых машин и электрогидравлических приводов//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1997. Вып. 1. С. 118-120.
- Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Шутенко В.И. Методы расчета статических характеристик автономных однокаскадных рулевых машин с двухдроссельным электрогидравлическим усилителем с отрицательным перекрытием//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1997. Вып. 1. С. 5-28.
- Белоногов О.Б., Жарков М.Н., Кудрявцев В.В., Шутенко В.И. Методы расчета статических характеристик автономных однокаскадных двухдроссельных рулевых машин//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 1998. Вып. 3-4. С. 132-177.
- Белоногов О.Б. Методы расчета статических характеристик двухдроссельных и четырехдроссельных электрогидравлических усилителей//Ракетно-космическая техника. Труды. Сер. XII. Королёв: РКК «Энергия», 2005. Вып. 1. С. 56-99.
- Белоногов О.Б. Экспериментальные исследования и идентификация углов истечения потоков в дроссельных окнах золотниковых гидрораспределителей рулевых машин ракет//Вестник МГТУ им. Н.Э. Баумана. Сер. «Машиностроение». 2015. № 1. С. 35-48.
- Белоногов О.Б. Экспериментальные исследования и метод идентификации безразмерных параметров течения потоков жидкости в дроссельных окнах золотниковых гидрораспределителей//Вестник МГТУ им. Н.Э. Баумана. Сер. «Машиностроение». 2015. № 3. С. 43-57.
- Белоногов О.Б. Экспериментальные исследования истечения и безразмерных параметров течения потоков жидкости в дроссельных окнах золотниковых гидрораспределителей с вращающимися гильзами//Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. 2016. № 5. С. 4-23.
- Белоногов О.Б. Метод идентификации безразмерных параметров течения потоков жидкости в шариковых предохранительных и переливных клапанах рулевых машин ракет и двигательных установок космических аппаратов//Вестник ФГУП «НПО им. С.А. Лавочкина». 2015. № 1. С. 66-70.
- Белоногов О.Б. Обобщенная математическая модель электродвигателя постоянного тока и метод идентификации ее параметров//Известия РАН. Энергетика. 2013. № 1. С. 75-81.
