Итеративный алгоритм расчета скорости и затухания трубных волн по данным акустического каротажа

Автор: Казанский Н.Л., Серафимович П.Г., Харитонов С.И.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика и вычислительная техника
Статья в выпуске: 1 т.3, 2001 года.
Бесплатный доступ
Предложен новый итеративный алгоритм расчета скорости и затухания трубной акустической волны, измеренной малым количеством приемников. Особенностью алгоритма является то, что оптимизация оцениваемых параметров производится и во временной, и в частотной плоскостях. Это, с одной стороны, обеспечивает высокую устойчивость алгори тма к шумам, а с другой стороны позволяет выполнять дисперсионный анализ волновых мод, н апример, волны Стоунли. Приведено сравнение нового алгоритма с гомоморфным алгоритмом.
Короткий адрес: https://sciup.org/148197646
IDR: 148197646
Iterative algorithm for calculating velocity and attenuation of the tube wave measured during acoustic logging
We develop a new iterative algorithm to obtain estimates for the velocity and attenuation of the tube wave, which is measured during acoustic logging by a few receivers. A distinguishing feature of the algorithm is that optimization of the estimated parameters is performed in both the space plane and the frequency plane. On the one hand, it provides a high degree of tolerance of our algorithm of noise and on the other permits one to conduct dispersion analysis of wave modes, for example, Stoneley waves. A comparison of the new algorithm and the homomorphic algorithm is made.
Текст научной статьи Итеративный алгоритм расчета скорости и затухания трубных волн по данным акустического каротажа
Оценка скорости и затухания волны является базовой задачей при обработке данных акустического каротажа [1]. По этим параметрам акустической волны определяют физические и механические свойства околосква-жинной породы (например, [2]).
Распространенным методом обработки данных акустического каротажа являются метод Прони [3] и его модификации [4, 5]. Недостатками метода Прони являются большое количество выбросов в значениях оцениваемых параметров и большая погрешность в оценке коэффициента затухаемости. Чтобы преодолеть эти недостатки был разработан гомоморфный метод [1], который будет подробно рассмотрен далее. Однако при малом количестве приемников и высокой зашумленности данных, как будет показано ниже, гомоморфный метод приводит к большой погрешности в оценке затухаемости волны. В качестве шумов могут присутствовать как измерительная погрешность аппаратуры, так и искажения вследствие наложения различных типов волн.
Для обработки данных с высокой зашумленностью был разработан метод предсказания [6, 7]. Этот метод устойчив к шумам данных, но позволяет оценивать только скорость волны. Кроме того, он не позволяет проводить дисперсионный анализ и, таким образом, может с достаточной надежностью применяться в анализе только продольных и поперечных волн, исключая дисперсные волны Стоунли.
Общей особенностью всех этих методов является то, что в них изначально выбирается или временная или частотная плоскость для последующих расчетов. Так в методе Прони и его модификациях расчеты выполняются в частотной плоскости. Это приводит к тому, что результаты оценок параметров базовым методом Прони по зашумленным данным имеют большие выбросы. Сглаживание получаемых оценок в гомоморфном методе [1] делает их более устойчивыми к шумам. Однако точность оценок в некоторых полосах частот снижается. Кроме того, гомоморфный метод применим только в том случае, если отсутствуют искажения вследствие наложения различных типов волн.
В методе предсказания [6] расчеты выполняются только во временной плоскости. Это исключает возможность проведения дисперсионного анализа.
Предлагаемый в данной работе метод использует в расчетах и временную и частотную плоскости. Поэтому он сочетает достоинства упомянутых выше методов. Он устойчив к шумам, позволяет работать с малым количеством приемников и выполнять дисперсионный анализ.
Идея использования и временной и частотной плоскостей в итеративном подходе к оценке требуемых параметров не нова. Она применялась в оптике, астрономии [8,9], при расчете дифракционных оптических элементов [10, 11].
Результаты работы предложенного итеративного алгоритма сравниваются с гомо- морфным методом. Приведем описание гомоморфного метода.
Гомоморфный метод определения скорости и затухания трубной волны
В общем случае для нахождения требуемых параметров волны необходимо решить волновое уравнение [12]:
1 s ( z ’t) =
(2p)
¥
¥
J d w exp( - i w t ) J dkX(k , w ) exp( - ikz)
-¥
-¥
где s(z, t) - отклик, записанный на приемни ке, z - расстояние между излучателем и приемником, t - время, w - частота, k - волно вое число. Выражение X(k,w) включает в себя информацию о геометрии модели, излучателе, граничных условиях и т.д. Для реализации и гомоморфного и итеративного алгоритмов не требуется знать точный вид вы ражения X (k ,w).
Записывая (1) в частотной плоскости и выполняя интегрирование по контуру в плос кости комплексного волнового числа, полу чим выражение, состоящее из суммы выче тов, охваченных контуром, и двух ветвящих ся интегралов
J, cut
[13]:
1 ¥
S (z, w ) = — dkX (k , w ) exp( - ikz) =
2 p
-¥
= i V R j exp( - ikz ) + [ (^
' Ccut
В некоторых частотных диапазонах основной вклад в (2) вносит лишь один вычет. Экспериментально установлено [1], что так происходит для трубной волны в диапазоне от 0 до 5 kHz.
Пусть спектр волны на первом приемнике имеет вид:
s1( w) = A(w)exp(ij>(w)).(3)
Спектр волны на втором приемнике описывается в виде:
s2 (w) = s( w) exp(ik (w )l),(4)
где l - расстояние между приемниками, k ( w )
- комплексное волновое число.
Запишем k ( w ) в виде:
k (w) = kr (w) + ia (w),(5)
где k r (w ) - описывает скорость волны, a ( w ) - затухание волны. Тогда (4) можно переписать в виде:
s 2 (w) = A( w) exp( - a (w )l) x x exp(i( j(w) + kr (w)/))
Необходимо оценить параметры k r (w ) и a(w ) по измеренным сигналам на приемниках во временной плоскости.
Вычислим натуральный логарифм s2(w ) и выделим действительную и мнимую части:
^ [ ln s2(w ) ] = ln A(w ) - a (w )l , (7)
□ [ ln s 2(w) ] =
= Развернутое значение [ j(w) - kr (w)/ ] . (8)
Выражения (7) и (8) описывают прямые линии. Выражение "развернутое значение" в (8) подразумевает [1], что полученные по модулю 2п значения "разворачиваются" в прямую линию добавлением чисел 2 пп, где n - целое, т.е. выполняется операция, обратная взятию по модулю 2 п . Коэффициенты этих прямых можно найти, используя метод наименьших квадратов (МНК). В этом и заключается определение скорости и затухания акустической волны гомоморфным методом.
Итеративный алгоритм определения скорости и затухания трубной волны
Применение гомоморфного метода дало хорошие результаты при использовании большого количества приемников (12) и малом затухании волны [1]. Чтобы более точно оценивать требуемые параметры, предлагаем интерпретировать вычисления, выполняемые в гомоморфном методе, как "половину итерации". То есть, имея отклик на нескольких приемниках во временной плоскости, переходим в частотную плоскость, выполняя преобразование Фурье. Далее, в соответствии с гомоморфным методом, находим коэффици- енты прямых - kr (w) и a (w), но не заканчиваем на этом расчеты, а переходим опять во временную плоскость. Здесь, получившуюся фазу мы оставляем неизменной, а результирующую амплитуду заменяем на амплитуду отклика на приемниках. На этом единичная итерация заканчивается.
Кроме того, в процессе итераций мы полагаем, что kr ( w ) и a ( w ) являются линейными функциями частоты. Такая "линеаризация" увеличивает быстродействие алгоритма и делает его более устойчивым к шумам. Для выполнения более точного дисперсионного анализа значения k r (w ) и a ( w ) можно аппроксимировать полиномами степени большей, чем первая.
Формально предлагаемый алгоритм для двух приемников записывается в виде:
Пусть 1 s(t ) и 2 s(t ) - отклики на первом и втором приемниках, соответственно. 1 S( щ ) = ф{ s(t)}=A^exptiG Ф^))-] - фурье-спектр отклика на первом приемнике.
-
1. Полагаем отклик на втором приемнике начальным приближением 2 s(t )=2s0 (t) .
-
2. Находим Фурье-спектр
-
3. Находим значения an и c n из условия
2 Sn ( Ю ) = ф{ 2 s n ( t )}= 2 A n ( Ю ) exp[i( 2 Ф n ( Ю ))] , где n - номер итерации.
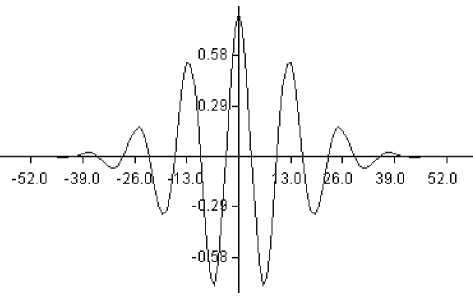
Рис. 1. Сигнал на нервом приемнике
Численные результаты
В качестве тестового сигнала на первом приемнике использовался (рис.1)
(
. 20р,. N i s(ti) = cos( — (i - у)) exp
^^^^^^^в
•i- N'2]
А2
. (11)
\ 7
min iZ
a n , cn
w
In
2 A n ( w ) 1 A( w )
+ a^w - c У n n ,
находим значения kn из условия
min 1 Z [i j(w ) + k n w-2 j n (w)] 2 * .
где N = 128 - количество отсчетов сигнала, А = 20, i = 1 k 128 .
Умножив Фурье-спектр сигнала (11) на коэффициент, описывающий затухание, и выполнив обратное Фурье-преобразование, получим сигнал на втором приемнике (без запаздывания)
2 S ( ti ) = ф-1 { exP( « i )Ф[ 1 S ( ti )] } , (12)
На рис.2 показаны амплитуды сигнала на первом приемнике и, получившегося в результате операции (12), сигнала на втором приемнике.
На рис.3 показана фаза сигнала на втором приемнике. Заметно, что операция (12) приводит к небинарной фазе. Подобное искажение фазы может происходить, например,
kn
w
4. Выполняем обратное Фурье-преобразование
2 s n + 1
(t ) = Ф — 1
1 A( w ) exp( - a n w + cn ) x
1 r lx eXP(1 j(w) + knw) J
5. Выполняем замену
2 sp n + i (t ) =
2 s ( t )
| 2 S n + 1 (tГ n +1()] .
Переходим к шагу 2 или заканчиваем итерации, если изменение 2 s n (t ) меньше за
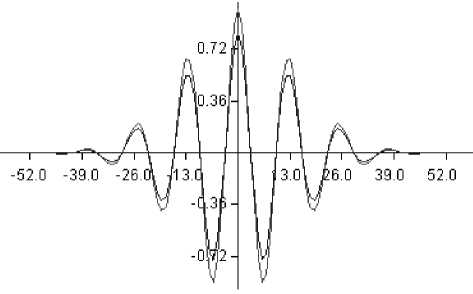
Рис. 2. Сигнал на первом приемнике и сигнал на втором приемнике с коэффициентом затухания
данной погрешности.
a = 0.003
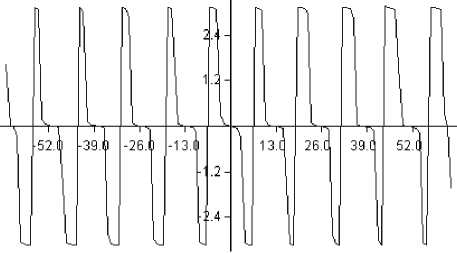
Рис. 3. Фаза сигнала на втором приемнике
при наложении друг на друга поперечной волны и волны Стоунли. Выражения (7) и (8) для модели (6) не учитывают возможности такого искажения фазы. Таким образом, цель предлагаемого итеративного процесса - точное восстановление сигнала (в том числе -фазы на втором приемнике, рис.3, включая оценку значений запаздывания и затухания сигнала, рис.4).
На рис.4 показаны амплитуды сигнала на первом приемнике и, получившегося в результате операции (12) и сдвига по времени для k = 0.1, сигнала на втором приемнике.
Эффективность работы предложенного итеративного алгоритма проверялась на зашумленных сигналах, показанных на рис.5. На этом рисунке представлены сигналы на первом и втором приемниках с коэффициентом затухания a = 0.003 и запаздыванием k=0.1, искаженные гауссовым шумом с дисперсией d = 0.01.
В результате численных экспериментов было установлено, что предложенный алгоритм обладает различными скоростями сходимости для двух оцениваемых параметров. Алгоритм сходился к правильному значению запаздывания за две итерации, в то время как для точной оценки затухания требовалось 1015 итераций. Такое различие можно объяснить различным характером воздействия шума на амплитуду и фазу сигнала.
Действительно, зашумленный сигнал на приемнике можно записать в виде:
s(w) = (A( w)exp(-a(w)l) + ea) x x exp(i(j (w) + kr (w )l + ef )) , где ea и ef - шумовые компоненты амплитуды и фазы, соответственно. После логарифмирования вариация фазы записывается в виде:
A ( 3 [ ln s(w ) ] ) = A ( e f ) .
Таким образом, преобразование не меняет вариацию фазы, и, следовательно, оценку скорости.
Используя разложение в ряд, вариация амплитуды записывается в виде:
A(^[lns( w )])=A( e a )
exp( a ( w ) l ) A ( w )
Т.е. вариация амплитуды растет экспоненциально с ростом расстояния l между приемниками, что затрудняет оценку величины затухания.
Для генерации гауссова шума из равномерной случайной выборки использовался алгоритм Бокса-Мюллера. Генерация равномерной случайной выборки выполнялась с помощью алгоритма Ранеку [14].
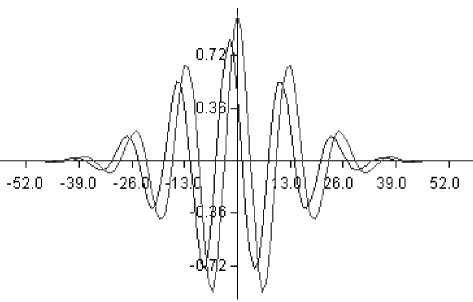
Рис. 4. Сигнал на первом приемнике и сигнал на втором приемнике с коэффициентом затухания a = 0.003 и запаздыванием k = 0.1
Для примера, представленного на рис.5, при оценке величины запаздывания алгоритм сошелся к правильному значению за две итерации, причем после первой итерации (что соответствует оценке гомоморфным методом)
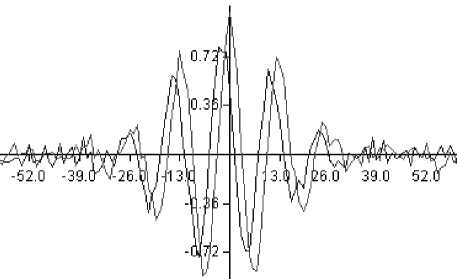
Рис. 5. Сигнал на первом приемнике и сигнал на втором приемнике с коэффициентом затухания a = 0.003 и запаздыванием k = 0.1 , искаженные гауссовым шумом с дисперсией d = 0.01
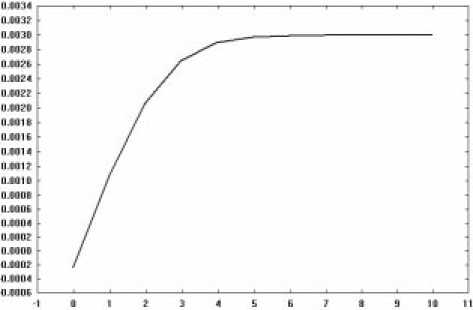
Рис.6. Зависимость оценки коэффициента затухаемости от числа итераций ошибка составляла всего 2%. Для оценки коэффициента затухаемости потребовалось 10 итераций, чтобы получить ошибку менее 1% (рис.6).
Выводы
Численные эксперименты показали работоспособность предлагаемого метода. Особенно эффективен новый метод по сравнению с гомоморфным методом при оценке затухания зашумленной акустической волны. Предполагаются дальнейшие исследования, направленные на разделение различных типов волн, присутствующих в сигнале, и оценку их параметров.
