Измерение параметров сигналов в многопозиционной радиолокационной системе при воздействии коррелированных помех

Автор: Богомолов Н.П.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 2 (9), 2006 года.
Бесплатный доступ
Рассматриваются оптимальные и квазиоптимальные алгоритмы обработки сигналов и измерение их параметров в многопозиционной радиолокационной системе при воздействии коррелированных помех. Предложены алгоритмы первичной и вторичной обработки информации. Проведена сравнительная оценка показателей качества измерений известных и предложенных алгоритмов.
Короткий адрес: https://sciup.org/148175196
IDR: 148175196 | УДК: 621.396.96
Measurement of parameters of signals in multiitem radar-tracking to system at influence of the correlated handicaps
Are considered optimum and quazioptimum algorithms of processing of signals and measurement of their parameters in the multiitem radar-tracking system at influence of the correlated handicapes. Algorithms of primary and secondary processing of the information are offered. The comparative estimation of parameters of quality of measurements of the known and offered algorithms is lead.
Текст научной статьи Измерение параметров сигналов в многопозиционной радиолокационной системе при воздействии коррелированных помех
Для повышения точности измерения энергетических параметров при воздействии коррелированных помех
предусматривается оценка интенсивности полезного сигнала в пунктах приема. При разнесении приемных пунктов на базу, большую, чем ожидаемый радиус пространственной корреляции сигнала, когерентная многопозиционная обработка заменяется некогерентной. В случае обеспечения высокой помехозащищенности приемных пунктов, т. е. при достаточном отношении сигнал / шум осуществляется переход от некогерентной междупунк-товой обработки сигналов к соответствующей междупун-ктовой обработке координатной информации, полученной в каждом приемном пункте.
Малобазовая многопозиционная радиолокационная система (МП РЛС) состоит из передающего пункта и L произвольно расположенных приемных пунктов с фазированной антенной решеткой (ФАР). Полагаем, что цели и постановщики активных помех находятся в дальней зоне, а доплеровские смещения частот колебаний от них в пунктах приема незначительны [1]. Модели внутренних
ln l =
Z 2 4 1 + 5 2 2
- In 1 + q- .
Здесь весовая интегральная сумма Z и параметр обнаружения сигналов д 2 определяются выражениями [1]:
N -1
Z = (2 N )-1 £ YT (f) к * (f, %),(3)
f =0
N -1
q2 =(2N )-1 £ XT (f, %) к * (f, %),(4)
tf где N =--число дискрет выборки входной реализа-Д t ции на интервале наблюдения Т, при шаге дискретизации
Д t , выбранном в соответствии с теорией Котельникова; K ( f , %) - весовой вектор оптимальной пространственно-частотной обработки; * - знак комплексного сопряжения; Т - знак транспонирования; д 2 - отношение сиг
нал / (шум + помеха) на выходе устройства оптимальной
шумов и внешних помех охарактеризуем гауссовскими центрированными стационарными случайными процес
обработки.
Весовой вектор K ( f , % )
может быть записан в виде
сами для комплексных амплитуд, а модели отраженных от цели сигналов соответственно гауссовой статистикой для комплексного амплитудного множителя. В этом случае модель принимаемых МП РЛС пространственно-временных колебаний (1), представленную дискретно в частотной области, можно записать в виде аддитивной смеси
K ( f , % ) = 2Ф - 1 ( f ) X ( f , % ) , (5)
здесь Ф( / ) - матрица спектральных плотностей мощности
L
Y( f ) = лрX( f, %) + £X ( f, V) + X„ ( f ) , l=1
где A - дискретное значение наличия цели (А =
1,0);
в = diag ( в i ) - блочная диагональная матрица комплексных амплитудных множителей; X ( f , % ) - блочный вектор-столбец амплитудно-фазовых распределений (АФР) в МП РЛС с учетом дискретного частотного описания структуры сигнала; % - вектор информативных параметров сигнала; X l ( f , % l ) - блочный вектор АФР помех от I- го источника для дискретной частоты / , X „ ( f ) - блочный вектор АФР шумов для дискретной частоты /
Блоки составных векторов относятся к соответствующему АФР сигнала и помех на ФАР в пунктах приема.
На основе принятого вектора-столбца входных воздействий У ( / ) требуется вывести решение о наличии или
помех и шумов, учитывающая корреляционные связи помеховых колебаний по элементам антенной системы [1].
В алгоритме предусмотрено когерентное суммирование сигнала с весами, обеспечивающими накопление сигнала и подавление коррелированных помех. Оценка информативных параметров находится как аргумент максимума логарифма отношения правдоподобия. Потенциальная точность измерения параметров вектора первичных измерений характеризуется матрицей точности
d 2 ln | Y
\ % д%.-д%.
ij
Ее диагональные элементы
Г = —5--
% ’ ( Д% , ) 2
пропорциональны параметру обнаружения и обратно
отсутствии полезных отраженных сигналов и измерить их параметры. Достаточной статистикой при обнаружении флуктуирующего сигнала (1) является логарифм отношения правдоподобия [1]
пропорциональны квадрату разрешения по параметру Д% i . Высокая точность определения координат цели в многопозиционной когерентной системе обеспечивается за счет достаточно высокой эффективности помехоза-щиты (большим отношением сигнал / шум) и высокой разрешающей способностью по угловым координатам
за счет разнесения в пространстве приемных пунктов. Однако наличие разрывной апертуры приводит к необходимости организации многоканальных широкополосных линий связи и принятия специальных мер по устранению неоднозначности измерения угловых координат целей. Несмотря на высокую эффективность оптимальной обработки сигналов в МП РЛС, ее практическая реализация может оказаться трудно выполнимой задачей в реальном масштабе времени. В связи с этим рассмотрим квазиоптимальные алгоритмы измерения информативных параметров с разделяющейся внутрипунктовой и междупунктовой обработкой.
Математическим условием разделения внутрипунктовой и междупунктовой обработки сигналов является факторизация блочных спектральных плотностей мощностей помех. Так, например, для идентичных ФАР в приемных пунктах прямая и, соответственно, обратная матрицы спектральных плотностей мощности может быть представлена в виде кронекеровского произведения [1]
Ф " 1 ( f ) = Ф вп ( f ) ® Ф^ ( f ) , (8) где ® - знак кронекеровского произведения; Фвп ( f ) и Фмп ( f ) - матрицы спектральной плотности мощности помех между элементами ФАР и пунктами приема соответственно.
При аналогичном представлении модели сигнала вектор весовых коэффициентов имеет вид
K ( f ,X ) = K вп ( f .X ) ® K мп ( f .^ ) , (9)
Причем, в пренебрежении запаздыванием огибающих входных колебаний на апертуре ФАР, внутрипунктовая пространственно-временная обработка определяется весовым вектором пространственной обработки (10)
Rвп (х ) = Фвп (f) Xвп (х„р), (10) и временной структурой ожидаемого сигнала А-(t, %пр), так что квп (X, t ) = Rвп (^„р) X (t Ар), (11) где Хпр, Хвр - пространственные и временные информативные параметры соответственно.
Для вычисления логарифма отношения правдоподобия (2) с учетом (9) для междупунктовой обработки достаточно одноканальных широкополосных линий связи. Благодаря внутрипунктовой и междупунктовой обработке с учетом корреляционных свойств помеховых колебаний осуществляется достаточная эффективность поме-хозащиты МП РЛС и сохраняется возможность защиты от постановщиков помех, действующих по главным лепесткам характеристик направленности отдельных пунктов.
Для эффективной помехозащиты необходимо применять специальные меры в каждом пункте в целях исключения подавления помех в главном лепестке диаграммы направленности (ДН). Также необходимо обеспечить передачу вышеназванных помех в пункт обработки информации (ПОИ), что предполагает наличие широкополосных линий связи.
В силу сложности реализации вышеназванных условий и ограниченного радиуса пространственной корреляции сигналов и помех в целях упрощения алгоритма обработки можно отказаться от когерентного междупун- ктового накопления сигнала и компенсации помех, а при достаточном отношении сигнал / шум в каждом из пунк тов приема и от некогерентного накопления сигналов между пунктами. Последнее практически эквивалентно заменяется междупунктовой обработкой результатов измерения координат целей. Оценки информативных параметров Xi, полученные в каждом из пунктов, объединяются в результирующую оценку а с учетом пересчета в единую систему координат [2]
L а = ср* |Х с«i аx ,(12)
V l L J
Cр 1 Cаl,(13)
l аi — h (Xi ),(14)
Cal — hl ( CX, ) ,( где exl - оценка координат вектора состояния цели в /-ом пункте приема; Cа - корреляционная результирующая матрица точности измерения декартовых координат; h (Xl) - векторная нелинейная функция пересчета координат цели; h (Cxl) - векторная нелинейная функция пересчета матрицы точности из сферической в декарто ву систему координат.
Для определения входящих в результирующее значение оценок матриц точности необходимо знать отношение сигнал / (помеха + шум) в пунктах приема. Кроме того, актуальность задачи оценивания отношения сигнал / (помеха + шум) обусловлена энергетическим характером информационных параметров в условиях воздействия коррелированных помех. Для моделей отраженного сигнала со случайной фазой и случайной амплитудой отмеченная задача сводится к оцениванию комплексных амплитуд или интенсивностей принимаемых сигналов на фоне помех. Требуемая статистика в /-ом пункте в этом случае определяется выражениями для сигнала со случайной начальной фазой [1]
ln l — 2
| Z ( X )| 2 q 2 ( X )
при однократной оценке амплитуды z (X) bl(X) — 2 q2lX), для сигнала со случайными начальной фазой и амплитудой ll(X) —
|Z l ( X )|2 b’ l , f b.q 2 ( X )
ln f bpq2 (X) + 1)4
.
b. — M { b l 2 } ,

при однократной оценке интенсивности сигнала
Z*(X)
b-—4 qw" 5Й.
Таким образом, основные операции выбранного алгоритма получения координатной информации о целях в условиях помех, определяющих структуру МП РЛС, сво дятся к когерентному накоплению сигнала и компенса- ции помех, получению оценок интенсивностей сигнала и информативных параметров в пунктах приема и между-пунктовой обработки координатной информации с учетом точности первичных измерений.
В условиях адаптации к воздействию активных помех происходит изменение ДН фазированных решеток в пунктах приема, что приводит к возникновению систематических и росту флуктуационных ошибок [3]. В частности, при действии помех в первых боковых либо в области главных лепестков характеристики ДН, возникает систематическая ошибка, которая в ряде случаев превышает половину ширины ДН. Указанное смещение устраняется путем дополнительных измерений интенсивностей полезных колебаний. В последнем случае, однако, возрастают флуктуационные ошибки однократных измерений. С целью их снижения предложено производить усреднение оценок интенсивности сигнала [3; 4]. В работе рассматривается возможность повышения точности измерения параметров радиолокационного сиг
цы точности текущего измерения параметров определяются как
_ д2 ln l
Cy + 1 ""Ю 2"
^
с = у 22
д 2 ln l
д(Ь2 Г
С = С =
C 12 C y +2
^^^^^^в
d 2ln l. . де-д ( ь :)
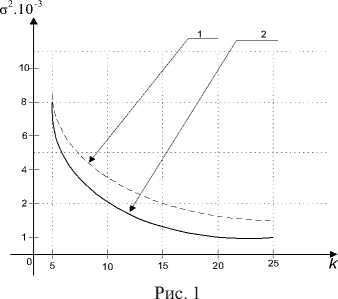
Результаты моделирования работы следящих измерителей - одного, построенного на основе статистики, инвариантной к энергии сигнала, и второго, реализующего совместное следящее измерение угловой координаты и средней энергии сигнала, приведены на рис. 1.
нала путем использования адаптивного алгоритма следящего измерения, реализующего совместную фильт
рацию оценок угловых координат цели и оценок энергии сигнала.
Для адаптивных алгоритмов, использующих оценку
энергии сигнала, существенным является вопрос, связанный с получением такой оценки. Действительно, оценить
энергию сигнала можно по нескольким входным реализациям. При этом вектор информативных параметров от реализации к реализации будет изменяться, что обусловлено движением цели. Отсюда следует необходимость
использования совместного следящего измерения координат цели и интенсивности сигнала.
Для синтеза совместного следящего измерителя будем полагать, что вектор информативных параметров л
содержит угловую координату и и энергию полезного сигнала. В соответствии с уравнением фильтрации оце
нок при следящем измерении результирующая оценка на к+ 1 шаге будет равна [1]
-1
X k +1 " X ok +1 + Cpk +1 Cyk +1 ( X yk +1
^^^^^^в
X ok +1 ) ,
А где Xok+1 - прогнозированное значение оценок и и b2,
полученных путем пересчета результирующей оценки к- го шага фильтрации; X yk + 1 - текущая оценка вектора л; Cyk +i - матрица точности текущих измерений; C^ + 1 -результирующая матрица ошибок следящего измерения
Здесь показаны зависимости дисперсий ошибок следящего измерителя, инвариантного к энергии сигнала (кривая 1), и измерителя, реализующего алгоритм (19)-(20) (кривая 2) от числа шагов фильтрации.
Из анализа графиков следует, что точность измерения угловых координат во втором измерителе в 1,5-2 раза выше, чем в измерителе, инвариантном к энергии сигнала.
На основе аналитических соотношений для оценок первичных и результирующих измерений (12)-(15) получим количественные оценки для средних квадратических ошибок (СКО) в МП РЛС в зависимости от числа приемных пунктов и сравним их со значениями СКО, рассчитанными для двухпозиционной оптимальной когерентной обработки сигнальной информации.
На рис. 2 представлены зависимости нормированных к базе (здесь база - расстояние между передающим и приемными пунктами) СКО оценивания координаты х от
на к+ 1 шаге.
свою очередь, величина
Cyk +1 ( X yk +1
^^^^^^в
X ok +1
представляет собой взвешанные невязкие и может быть полученные путем дифференцирования статистики (17)
по соответствующим параметрам, т. е.
. д ln l . д ln l
^ - • А 2 -
Результирующая матрица точности С к + 1 на к+ 1 шаге определяется равенством
С. = С , + С , k +1 Vo1: +1 + У^ук +1 ,
где С ок+ 1 - прогнозированное значение матрицы точности на к+ 1 шаге, получаемое путем пересчета результирующей матрица точности к- го шага. Элементы матри
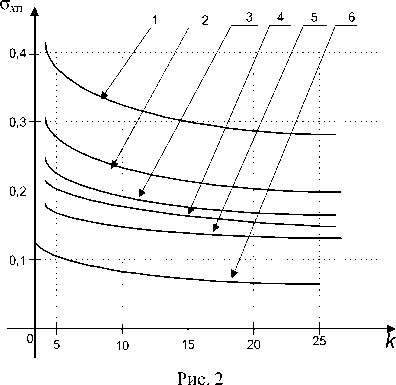
числа шагов поступления информации к . Как показали результаты расчетов, характер изменения соответствующих величин по осям Уи2 аналогичен приведенным на рис. 2. Здесь кривая под номером 6 соответствует характеру изменения о =f(К) для оптимальной двухпозиционной когерентной обработки, кривые 1-5 - для МП РЛС, причем номер кривой соответствует количеству пунктов приема участвующих в обработке принятых колебаний. Из анализа кривых (рис. 2) следует, что даже при некогерентной обработке принятых колебаний в МП РЛС, состоящей из пяти приемных пунктов, СКО измерения координаты х в 1,2-1,8 раза превышает соответствующие значения СКО для двухпозиционной оптимальной когерентной обработки сигнальной информации.
Таким образом, можно сформулировать следующие выводы:
-
1. Проведен качественный анализ алгоритмов измерения информативных параметров сигнала в малобазовой МП РЛС, полученных на основе оптимального решения задачи оценивания методами математической статистики. Несмотря на высокую потенциальную точность оценок в когерентной МП РЛС, ограничения, связанные с радиусом пространственной корреляции сигнала и помех, неоднозначностью угловых измерений на разрывных апертурах, сложностью реализаций широкополосных многоканальных линий связи, приводят к постановке задачи определения алгоритмов измерения и анализа их точности в некогерентной МП РЛС.
-
2. Качественный анализ квазиоптимальные алгоритмов обработки в когерентной МП РЛС свидетельствует о возможности перехода от некогерентной междупункто-вой обработки сигнала к междупунктовой обработке координатной информации. Ухудшением точности измерения при указанном переходе можно пренебречь в случае регулярных измерений в пунктах приема. Последнее обеспечивается за счет адаптивной пространственной обработки сигналов в каждом пункте приема и учета в алгоритме измерения угловых координат целей энергетического характера информативных параметров сигналов, принимаемых на фоне помех.
-
3. Использование данных о параметрах сигнала позволяет повысить точность измерения информативных параметров (угловых координат) целей на фоне помех, имеющих малые угловые различия с полезным сигналом. Для использования этих данных в пунктах приема МП РЛС целесооб
-
4. Проведен количественный анализ ошибок измерения координат целей в выбранной малобазовой МП РЛС. Установлено, что для указанного МП РЛС, СКО измерения координаты А в 1,2-1,8 раза превышают соответствующие значения СКО для двухпозиционной оптимальной когерентной обработки сигналов. Для повышения точности измерения координат цели в условиях воздействия помех предлагается использовать совместную фильтрацию оценок интенсивностей полезных сигналов и оценок их информативных параметров в пунктах приема, а также фильтрацию результатов измерения координат целей в приемных пунктах и ПОИ.
разно проводить совместную фильтрацию как угловых координат целей, так и средней энергии сигнала. Кроме того, повышение точности совместного измерения можно дополнительно обеспечить за счет формирования прогнозируемой оценки угловых координат по обьединенным данным всех пунктов при косвенном измерении [5].
