Измерение реактивной тяги ионных двигателей методом двойного угла

Автор: Вавилов И.С., Ячменев П.С., Федянин В.В., Жариков К.И., Степень П.В., Лукьянчик А.И.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.17, 2024 года.
Бесплатный доступ
Данная статья венчает обзорные работы авторов вчасти силовых стендов измерения тяги ионных двигателей. Авторы представили аэродинамический стенд с шарнирной мишенью с шарниром на магнитном подвесе. Ключевая особенность представленной конструкции от всех предыдущих - это снижение момента силы тяжести мишени методом двойного угла (аналогия с провисшей дверью). Это позволило увеличить чувствительность стенда до уровней субмикроньютонов (в экспериментах от 110 нН) и уверенно регистрировать усилия уровней мкН без снижения жёсткости мишени. В работе представлены результаты замера тяг одиночной ионно-оптической системы и прототипа ускорительного микродвигателя, разработанного авторами.
Шарнир, мишень, лазерный оптический рычаг, аргон, воздух, реактивная тяга, ионный двигатель, азот, гелий, углекислый газ, фоновый газ
Короткий адрес: https://sciup.org/146282903
IDR: 146282903 | УДК: 629.7.018
Measurement of jet thrust of ion thrusters by the double angle method
This work crowns the review works of the authors in terms of power stands for measuring the thrust of ion thrusters. The authors presented an aerodynamic stand with a hinged target with a hang on a magnetic suspension. The key feature of the presented design from all previous ones is the reduction of the moment of gravity of the target by the double angle method (analogy with a sagging door). This made it possible to increase the sensitivity of the stand to the levels of sub-micro Newtons (in experiments from 110 nN) and confidently register the forces of the μN levels without reducing the rigidity of the target. The paper presents the results of measuring the thrust of a single ion-optical system and a prototype accelerator micro thruster developed by the authors.
Текст научной статьи Измерение реактивной тяги ионных двигателей методом двойного угла
Создание ионных двигателей с энергопотреблением менее 10 Вт до сих пор является важнейшей нерешённой проблемой. Это связано с ключевой особенностью ионных двигательных систем от иных реактивных двигателей: ионная двигательная система является и генератором рабочего тела (плазмы), и ускорителем созданного рабочего тела, в то время как реактивные двигатели на химической энергии или сжатом газе служат только ускорителями. Соответственно, газовые реактивные двигатели проще поддаются прямому масштабированию, что в большую, что в меньшую стороны. В случае ионных двигателей прямое масштабирование затруднено вследствие двухкомпонентной их структуры. Если ускоряющую систему (в классическом форм-факторе ионных двигателей – это ионно-оптическая система) возможно реализовать с низким рабочим энергопотреблением, то создание экономичного источника плазмы – очень непростая задача. Снижение уровня потребляемой энергии генератором плазмы ведёт к снижению процента ионизации, следовательно, уменьшается массовый расход рабочего тела, за этим параметром снижается и реактивная тяга. Эффективность ионного двигателя можно оценить по формуле:

где F – тяга двигателя, Н; u – скорость истечения ионов (удельный импульс), м/с; ṁ – массовый расход рабочего тела, кг/с; Р ген – энергия на генерацию рабочего тела, Вт; Р уск – энергия на ускорение рабочего тела, Вт. В знаменателе в скобках представлено полное энергопотребление двигателя.
Если пропустить параметры имеющихся маломощных ионных двигателей через формулу (1), то для двигателей на эффекте Холла (стационарные плазменные двигатели – СПД) можно получить следующие значения КПД: ксеноновый двигатель НТ-100 [1] при энергопотреблении 10 Вт имеет эффективность 21 %; ксеноновый двигатель Micro Hall Thruster [2, 3] при энергопотреблении 10 Вт имеет эффективность 10 %. При этом те же СПД при энергопотреблении 80–100 Вт дают КПД выше 25 %: ксеноновые СПД ПлаС-34 и ПлаС-40 [4] эффективность 37 %; ксеноновый СПД HEP-100PM [5] при подведённых 100 Вт даёт КПД 29 %. В части ионных двигателей классического исполнения (с ионно-оптической системой) ситуация следующая: японский ксеноновый двигатель μ1 [6, 7] с энергопотреблением 15.1 Вт имеет эффективность 10.8 %; аргоновый двигатель MRIT [8] при энергопотреблении 13–15 Вт имеет максимальный КПД 10.7 %. Попытка опустить суммарное энергопотребление ионного двигателя ниже 10 Вт отражена в работах [9, 10]. В работе [9] при энергопотреблении 8 Вт на аргоне эффективность разработки MMIT составила 66.2 %, на ксеноне – 70.3 %. В источнике [10] произведено масштабирование двигателей семейства RIT в сторону уменьшения габаритных размеров. Получены характеристики двигателей RIT-1 (мощность – 4.41 Вт, КПД по формуле (1) – 21 %), RIT-2 (мощность – 13.7 Вт, КПД –33 %), RIT-3 (мощность – 35.9 Вт, КПД – 41 %). Проблема в том, что представленные в работах [9, 10] данные получены теоретически на основе метода конечных элементов или масштабирования имеющейся конструкции (RIT-10 для прогнозируемых моделей RIT-1, RIT-2 и RIT-3). В работе [11] приведены результаты испытаний конфигураций SE 1 и SE 2 макетного двигателя MiDGIT. При мощностях 13–18 Вт были получены значения КПД 3.36–15 %.
Из приведённого краткого обзора видно, что большинство ионных микродвигателей существует в области мощностей более 10 Вт. В областях мощностей до 13–15 Вт эффективность ионных двигателей находится в переделах 10–11 %. В этом же диапазоне КПД СПД может достигать 20 %. Ионные двигатели с энергопотреблением менее 10 Вт существуют только как теоретические модели. Устройства, ускоряющие ионы при суммарных мощностях потребления менее 10 Вт, нельзя называть двигателями из-за низкого тягового КПД (менее 10 %).
Для лабораторного исследования новых моделей реактивных двигателей, в частности, для оценки их эффективности, необходимо знание таких параметров, как тяга и скорость истечения струи. Предпочтительно такие данные получать в результате экспериментальных исследований. Теоретические расчеты и численное моделирование являются вспомогательными процедурами, прилагаемыми к результатам эксперимента.
Определение величины реактивной тяги осуществляется силовыми стендами, в основе работы которых заложены весовой либо аэродинамический методы [12]. Перед тем как приступить к работе над данной статьёй авторами был проведён обзор существующих силовых стендов определения тяги микродвигателей. Были рассмотрены торсионные маятники (23 конструкции), вертикальные маятники (22 конструкции), качельные стенды (7 конструкций), упругие (18 конструкций) и шарнирные (14 конструкций) мишени. В основу всех стендов авто-– 630 – ры пытаются вложить простоту принципа измерения силового воздействия, математического аппарата обработки показаний, калибровки и невосприимчивости к электромагнитным помехам и фоновой вибрации. В областях измерения тяг уровней мкН часто используется метод регистрации перемещений лазерным оптическим рычагом (ЛОР). ЛОР позволяет снизить погрешность измерения перемещения чувствительного элемента стенда путём изменения длины отражённого луча. Также ЛОР не чувствителен к электромагнитным помехам. Метод мишени нашёл широкое применение в лабораторных исследованиях двигательных систем благодаря универсальности, простоте реализации и точности, сопоставимой с торсионными или маятниковыми стендами.
Развитие маломощных ионных двигателей создаёт проблему измерения тяг уровней мкН. Чувствительность стенда может достигаться за счёт увеличения длины рычага силы (применимо для торсионных и вертикальных маятников, качелей и упругих мишеней), снижения массы чувствительного элемента (применимо для вертикальных маятников и шарнирных мишеней) или совершенствования датчиков микроперемещения. Увеличение длины рычага ведёт к росту массогабаритных параметров стенда и возникновению собственных колебаний в системе. Снижение массы чувствительного элемента ограничено его жёсткостью. Типы применяемых датчиков регистрации микроперемещений: ёмкостные, оптические, LVDT, интерферометры. Каждый из представленных типов находится на пределе своей чувствительности. Ожидать разработки новых типов детекторов – дело неблагодарное. Плюс любые электронные системы подвержены электромагнитным воздействиям, поэтому испытания ВЧ/СВЧ-ионных двигателей, пульсирующих плазменных или электродуговых двигателей связаны с проблемами защиты сигнальной линии от помех.
В данной работе авторы представляют своё решение проблемы повышения чувствительности силового стенда измерения ионной реактивной тяги.
Постановка задачи
Авторы статьи в научно-исследовательской лаборатории «Двигательные установки микротяги малых космических аппаратов» (НИЛ «ДУММИТ МКА») в рамках проекта, финансируемого РНФ, разрабатывают ускорительные ВЧ/СВЧ-ионные двигатели с энергопотреблением менее 10 Вт. Соответственно, столкнулись с проблемой измерения реактивных тяг уровней 1–10 мкН. На базе НИЛ «ДУММИТ МКА» разработан силовой стенд на основе аэродинамического метода с шарнирной мишенью. В части установки мишени была предложена концепция «провисшая дверь». Это метод обезвешивания мишени путём отклонения оси мишени от вертикальности на малый угол. Таким образом, мишень, как провисшая дверь при отклонении, от равновесия стремится вернуться в положение наименьшей потенциальной энергии в гравитационном поле Земли. Впервые стенд на основе концепции «провисшая дверь» представлен в работе авторов [13]. Авторы назвали данный подход аэродинамическим методом двойного угла (АМαβ-метод). Здесь измеряемый угол – угол α, угол отклонения оси вращения мишени от вертикального положения задаваемый и обозначен как β.
У стенда, представленного в [13], были выявлены следующие недостатки:
-
1. Осью вращения мишени являлась синтетическая нить (из дедерона диаметром 0.05 мм). На чувствительность стенда оказывало влияние натяжение нити. Большее натяжение приво-
- дило к потере чувствительности, меньшее натяжение приводило к провисанию нити и изменению угла β. Соответственно, точное определение угла β не представлялось возможным;
-
2. Сложность фиксации угла α поворота мишени из-за малых углов отклонения. Ранее напротив стрелки мишени устанавливалась веб-камера, оснащённая увеличительным стеклом. Таким образом, осуществлялась фиксация смещения мишени при воздействии на неё струи.
В НИЛ «ДУММИТ МКА» авторами была изготовлена прозрачная вакуумная камера, что дало возможность усовершенствовать аэродинамический стенд. Прозрачные стенки позволили применить ЛОР. Зеркало установлено на мишень. Луч лазера проецировался на стену помещения лаборатории. Увеличение расстояния от зеркала до точки проецирования луча позволило увеличить чувствительность стенда и уменьшить погрешность измерения микротяги.
Концепция стенда
Как было сказано ранее, работа стенда основана на концепции «провисшая дверь» (метод двойного угла). При отклонении оси поворота створки от вертикальности створка имеет положение низшей потенциальной энергии. Выведение её из положения равновесия требует малого усилия из-за малости угла отклонения, при этом створка стремится вернуться в положение равновесия. Таким образом, положение створки имеет некоторое абсолютное значение относительно гравитационного поля Земли. Метод двойного угла можно представить графически (рис. 1).
В общем случае измерительная система состоит из мишени, экрана и ЛОР. Ось поворота мишени наклонена и образует угол β с вертикалью. При воздействии реактивной струи на мишень последняя отклоняется на угол α. До воздействия струи лазерный луч 1 (рис. 1) отражается от мишени в виде луча 2 и проецируется на экране в точку А. После отклонения мишени на угол α от начального положения отражённый луч принимает вид 3. Угол между лучами 2 и 3 равен 2·α. В новом положении луч проецируется в точку Б. Наклон отрезка АБ относительно горизонтали, есть угол β. По длине отрезка АБ и расстоянию между мишенью и экраном можно получить угол α.
Сила давления реактивной струи на мишень определяется по простому выражению:
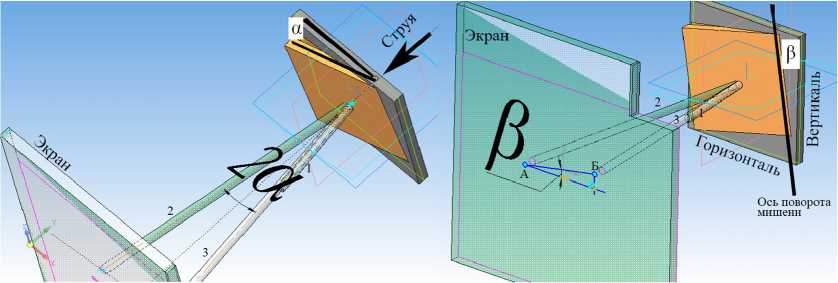
Рис. 1. Графическое представление метода двойного угла
Fig. 1. Graphical representation of the double angle method
– 632 –
P = m ■ g -sina -sin fl ■ —, (2)
где m – масса мишени; g – ускорение свободного падения; α – угол отклонения мишени (определяется по длине отрезка АБ и расстоянию от мишени до экрана); β – угол обезвешивания мишени (определяется по углу наклона отрезка АБ по отношению к горизонтали); L – расстояние от оси вращения мишени до её центра тяжести; H – расстояние от оси вращения мишени до центра давления струи.
Конструкция стенда
Выше было сказано, что проблемой предыдущей версии стенда являлась ось вращения мишени. Мишень вращалась на натянутой леске, предполагалось, что величина угла β равна установленному значению. Однако истинное значение угла могло отличаться от установочного из-за различного натяжения лески. В новой версии стенда была реализована ось на магнитном подвесе: ось мишени выполнена из стали, её концы заострены, ось устанавливается между двумя магнитами (цилиндры диаметром 4 мм и высотой 4 мм) таким образом, что одним концом она опирается на нижний опорный магнит (с плоским торцом), а верхний конец оси притягивается к верхнему магниту (выполнен с коническим заострением). Расстояние между заострённым концом верхнего магнита и верхнего конца оси менее 0.3 мм. Таким образом, ось имеет только одну точку касания и минимальное трение при повороте мишени. Такое исполнение шарнира является одновременно и вихретоковым гасителем паразитных колебаний, возникающих при работе вакуумного насоса. Из-за того, что ось имеет одну точку опоры, фактический угол β при измерениях может сильно отличаться от установочного значения угла β. Поэтому при расчете тяги необходимо пользоваться значением угла обезвешивания, полученного по схеме на рис. 1. 3D-модель стенда в сборе представлена на рис. 2.
Стенд состоит из подвижного корпуса мишени (ротора) 1, в котором находятся магниты (держатели оси) 2. Между магнитами 2 соосно расположена ось 3, к которой (посредством зеркала) 5 крепится мишень 4. Мишень 4 установлена на керамическое зеркало 5, которое, в свою очередь, фиксируется на оси 3. Зеркало 5 служит отражателем для лазерного луча, испускаемого лазером 6. Лазерный луч поступает на зеркало 5 через отверстие в планке 7, отражается от зеркала и проецируется на экране (на рисунке не показано). Лазер 6 установлен в держатель
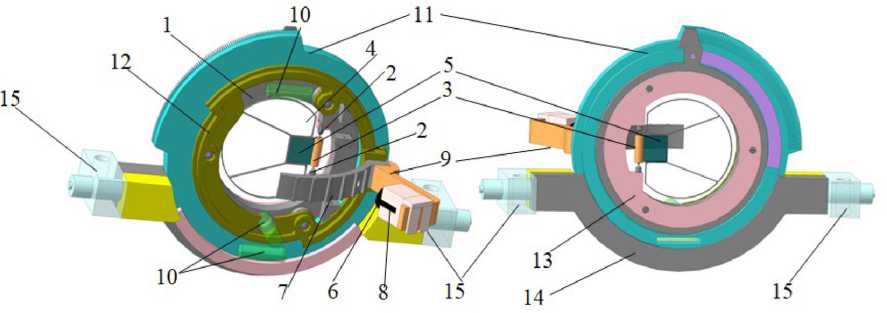
Рис. 2. 3D-модель стенда измерения реактивной тяги ионного двигателя
Fig. 2. 3D-model of the ion thruster thrust measurement stand
– 633 –
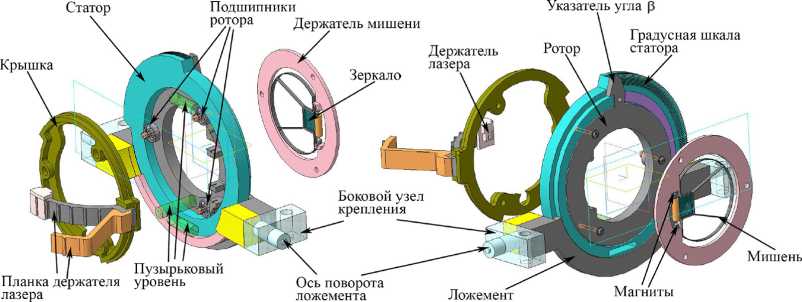
Рис. 3. Разнесённая сборка стенда
Fig. 3. Spaced assembly of the stand лазера 8, который крепится к планке 9. Планка 7 служит для поддержки лазера в случае мишеней с центральным расположением зеркала, планка 9 – для мишеней со смещённым расположением зеркала на мишени. Для выставления вертикали оси 3 чувствительного элемента 4 на экспериментальный стенд установлены пузырьковые уровни 10. Угол обезвешивания β чувствительного элемента 4 можно регулировать с помощью вращения (в стенд установлены подшипники) ротора 1 относительно неподвижного корпуса (статора) 11. На корпусе 1 выполнена указательная стрелка, а на статоре 11 выполнена градусная шкала. Элемент 12 (крышка) не даёт выпасть ротору 1 из статора, элемент 13 (держатель мишени) является держателем магнитов оси мишени.
Собранный стенд устанавливается на ложементе 14. Ложемент 14 крепится к боковым узлам крепления 15. В боковые узлы 15 вставляются стойки (на рис. 2 не показаны), с помощью которых экспериментальный стенд устанавливается в вакуумной камере. Все корпусные элементы стенда и элементы мишени выполнены методом аддитивных технологий. Парус мишени выполнен из тонкого листа ПВХ. Масса мишени – 2.5 гр., расстояние от оси вращения мишени до её центра тяжести L =22 мм; расстояние от оси вращения мишени до центра давления H =30 мм.
На рис. 3 представлена взрыв-схема стенда с указанием основных элементов.
Градусная шкала статора позволяет обеспечивать установку ротора стенда в положение β=900. В этом случае стенд приобретает вид классического стенда измерения тяги на основе шарнирных мишеней.
Фотографическое изображение стенда, установленного в вакуумной камере, представлено на рис. 4.
Экспериментальные исследования
Как уже говорилось выше, представленный стенд разработан для исследования характеристик прототипа ускорительного ВЧ/СВЧ-ионного двигателя (УМД), разрабатываемого в НИЛ «ДУММИТ МКА». Соответственно, были проведены экспериментальные замеры силы давления струи ионизированного газа, истекающего из прототипа на мишень. Также в рамках развития ме- – 634 –

Рис. 4. Фотография стенда измерения тяги, установленного в вакуумной камере
Fig. 4. Photo of the thrust measurement stand installed in the vacuum chamber тода определения параметров ионизированной струи по термовизуализационным картинам авторами были проведены замеры силы давления ионизированной струи, истекающей из одиночной (без дополнительного плазмогенератора) двухэлектродной ионно-оптической системы (ИОС).
На рис. 5 приведена принципиальная схема определения тяги. Представленная схема измерения идентична для обоих источников ускоренных ионов. Источник ионов (ИОС или УМД) располагается на расстоянии длины свободного пробега частиц от мишени стенда. Без подачи ускоренного потока лазерный луч 4 отражается от зеркала мишени 2 и находится в точке А на измерительном экране 5. При подаче ускоряющего воздействия в ИОС или УМД (поз. 1) создается тяга Р , которая отклоняет мишень 2 на угол α, обоснованный равенством моментов сил тяжести и реактивной тяги. Луч лазера 4 отражается от зеркала и падает на измерительный экран 5 в точке B . С помощью видеокамеры 6 осуществляется съёмка поверхности экрана до и после воздействия потока на мишень. Сравнение полученных изображений производится в САПР «Компас-3D». Для УМД эксперимент проводился при подаче рабочего газа в прототип и без подачи газа, только на остаточном фоновом давлении.
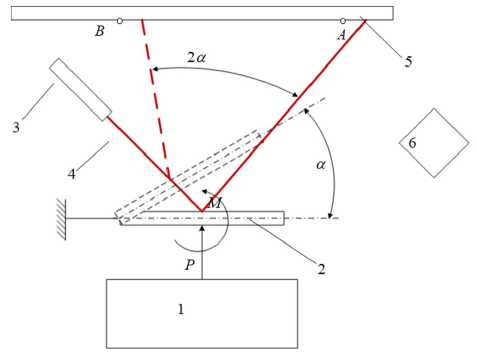
Рис. 5. Принцип измерения тяги
Fig. 5. The principle of thrust measurement
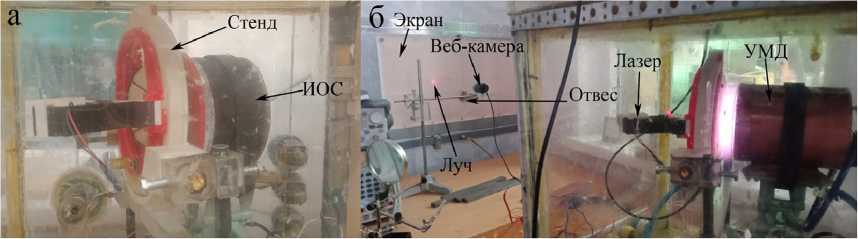
Рис. 6. Фотографическое изображение экспериментального определения тяги
Fig. 6. A photographic image of the experimental determination of thrust
Фотографическое изображение экспериментальной установки при испытаниях одиночной ИОС и УМД представлено на рис. 6. На рис. 6а изображено определение тяги одиночной ИОС, установленной в корпус, ограничивающий пробой между перфорированными электродами. Установившиеся напряжения на электродах ИОС составили: 670 В (фоновое давление 18 и 32 Па); 745 В (фоновое давление 20 Па) и 770 В (фоновое давление (20 Па). Рабочее тело во всех случаях – воздух. На рис. 6б показан более общий вид на установку. Испытания УМД осуществлялись для пяти видов рабочего тела при условии их подачи в рабочую камеру прототипа: аргон (фоновое давление 5.8 Па и 6.2 Па); азот (фоновое давление 3.4 Па и 3.7 Па), воздух (фоновое давление 4.5 Па и 5 Па); гелий (фоновое давление 4.8 Па и 5.2 Па) и углекислый газ (фоновое давление 3.9 Па, 4.2 Па и 4.4 Па).
Для отображения вертикали в поле зрения веб-камеры на тонкой нити подвешен алюминиевый цилиндр. Гашение паразитных колебаний цилиндра – вихретоковое при помощи постоянного магнита.
На рис. 7 изображена пневмогидравлическая схема проведения экспериментальных исследований по определению тяги при фоновом давлении в вакуумной камере (для испытаний ИОС).
На рис. 7 позициями обозначены: 1 – баллон с рабочим телом; 2 – газовый редуктор; 3 – запорный вентиль; 4 – ручной регулятор расхода газа высокого давления (РРГ ВД); 5 – ручной регулятор расхода газа низкого давления (РРГ НД); 6 – расходомер; 7 – муфты; 8 – манометр; 9 – вакуумная камера; 10 – одиночная ИОС; 11 – источник высокого напряжения; 12 – пучок ионов; 13 – стенд измерения тяги; 14 – мишень стенда измерения тяги; 15 – лазер; 16 – лазерный луч; 17 – измерительный экран.
При определении тяги одиночной ИОС производятся следующие действия:
-
– включение вакуумного насоса для понижения давления в вакуумной камере 9. Достигается минимально возможное значение уровня фонового давления для данной вакуумной системы (3–4 Па);
-
– открытие баллона с рабочим телом 1 (при испытаниях на воздухе баллон отсутствует, атмосферный воздух поступает в магистраль открытием вентиля 3) и открытие запорного вентиля 3 для создания требуемого уровня фонового давления в вакуумной камере;
-
– произвести тонкую настройку расхода рабочего газа в вакуумную камеру посредством РРГ ВД и РРГ НД. Дождаться требуемого установившегося фонового давления;
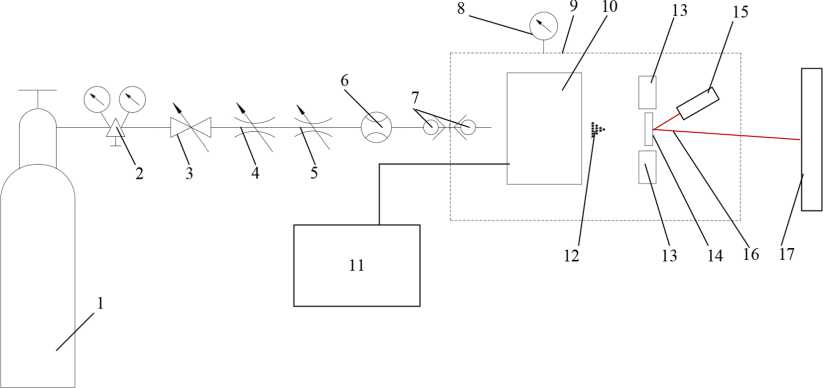
Рис. 7. Пневмогидравлическая схема для проведения экспериментальных исследований по определению тяги при фоновом давлении в вакуумной камере
Fig. 7. Pneumohydraulic scheme for conducting experimental studies to determine thrust at background pressure in a vacuum chamber
-
– включить лазер 15. Произвести фотографирование начальной точки отражённого лазерного луча 16 на измерительном экране 17;
-
– подать напряжение на электроды ИОС 10 с помощью источника напряжения 11. После подачи напряжения на электродах ИОС создаётся тлеющий разряд, из-за разности потенциалов возникает ускоренное движение ионов 12 в сторону мишени 14. Пучок ионов 12 действует с некоторой силой на мишень 14 стенда 13. Под действием силы мишень меняет свое первоначальное положение. Производится фотографирование нового положения точки лазерного луча 16 на измерительном экране 17;
-
– в САПР «Компас-3D» по фотографиям начального и конечного положения точки луча 16 на измерительном экране 17 определяется угол α и угол β. По формуле (2) определяется экспериментальный уровень тяги одиночной ИОС.
На рис. 8 показана пневмогидравлическая схема проведения экспериментальных исследований по определению тяги с подачей рабочего тела в прототип УМД. От схемы на рис. 7 данная схема отличается только наличием магистрали ввода газа непосредственно в рабочую полость прототипа.
На рис. 8 позициями обозначены: 1 – баллон с рабочим телом; 2 – редуктор; 3 – запорный вентиль; 4 – ручной РРГ ВД; 5 – ручной РРГ НД; 6 – расходомер; 7 – муфты; 8 – манометр; 9 – вакуумная камера; 10 – прототип УМД; 11 – источник питания; 12 – пучок плазмы; 13 – стенд измерения тяги; 14 – мишень стенда измерения тяги; 15 – лазер; 16 – лазерный луч; 17 – измерительный экран.
При определении тяги прототипа УМД последовательность действий практически аналогична тем, что производятся при исследовании одиночной ИОС:
-
– включение вакуумного насоса для понижения давления в вакуумной камере 9. Достигается минимально возможное значение уровня фонового давления для данной вакуумной системы (3–4 Па);
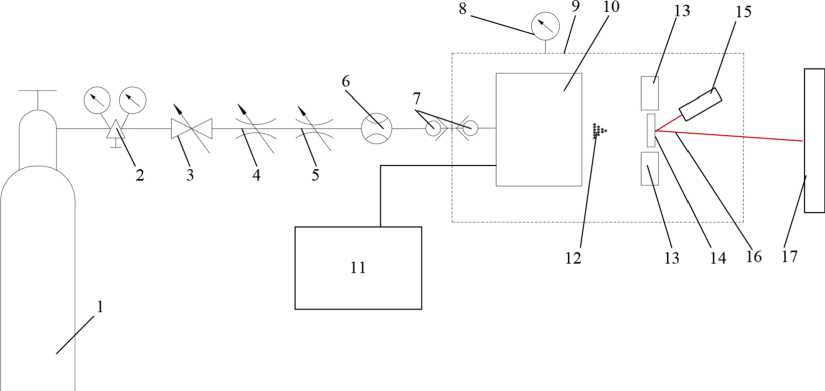
Рис. 8. Пневмогидравлическая схема для проведения экспериментальных исследований по определению тяги при подаче газа в прототип
Fig. 8. Pneumohydraulic scheme for conducting experimental studies to determine the thrust when gas is supplied to the prototype
-
– открытие баллона с рабочим телом 1 и открытие запорного вентиля 3;
-
– произвести тонкую настройку расхода рабочего газа в вакуумную камеру посредством РРГ ВД и РРГ НД. Дождаться минимально возможного установившегося фонового давления при условии существования расхода рабочего газа;
-
– включить лазер 15. Произвести фотографирование установившейся начальной точки отражённого лазерного луча 16 на измерительном экране 17 (подача газа в полость прототипа отклоняет мишень от положения равновесия);
-
– подать ВЧ/СВЧ-энергию в прототип УМД 10 включением источника питания 11. После подачи ВЧ/СВЧ-энергии в полость резонатора прототипа УМД создаётся тлеющий разряд и ускоряющее переменное напряжение в резонаторе. Возникает ускоренное движение плазмы 12 в сторону мишени 14. Струя 12 действует с некоторой силой на мишень 14 стенда 13. Под действием силы мишень меняет свое первоначальное положение. Производится фотографирование нового положения точки лазерного луча 16 на измерительном экране 17;
-
– в САПР «Компас-3D» по фотографиям начального и конечного положения точки луча 16 на измерительном экране 17 определяется угол α и угол β. По формуле (2) определяется экспериментальный уровень тяги прототипа УМД.
На рис. 9, для примера, представлено фотографическое изображение измерительного экрана, полученного при испытаниях прототипа УМД на аргоне при подаче газа в полость прототипа и фоновом давлении аргона 5.8 Па. Положение № 1 – это положение пятна ЛОР до подачи ВЧ-энергии в прототип УМД. Положение № 2 – установившееся положение мишени после подачи ВЧ-энергии в прототип УМД. Показана вертикаль и вихретоковый гаситель паразитных колебаний груза (алюминиевого цилиндра).
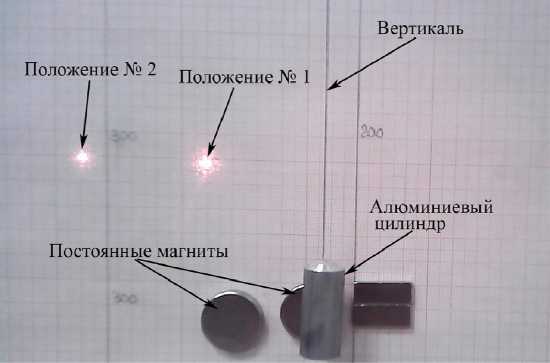
Рис. 9. Фотографическое изображение измерительного экрана (совмещение двух фотографий)
Fig. 9. Photographic image of the measuring screen (combination of two photos)
Результаты экспериментальных исследований
Тяга одиночной ИОС определялась при испытаниях на остаточном воздухе. Мишень расположена на расстоянии 20 мм от катода ИОС. Экспериментальные данные сведены в табл. 1. Здесь тяга представлена в мкН. Напряжение на электродах ИОС и давление остаточного воздуха расположены в ячейках по возрастанию. Видно, что сила давления на мишень от тлеющего разряда при представленных фоновых давлениях в вакуумной камере (18–32 Па) очень низка и не превышает 0.3 мкН. Это обусловлено высокими удельными потерями энергии ионов при прохождении фонового газа. Испытание ИОС при более низких давлениях (ниже 10 Па) не представляется возможным из-за нестабильности разряда или полного его отсутствия.
Для увеличения чувствительности стенда при уровнях тяг, представленных в табл. 1, необходимо удлинить путь ЛОР. Смещение пятна лазера на экране при испытании одиночной ИОС не превышает 1 мм. Это ведёт к росту погрешности определения углов α и β, следовательно, и величины реактивной тяги.
Определение тяги для прототипа УМД производилось при фоновых давлениях не выше 7 Па при условии подачи газа в рабочую полость прототипа. Расстояние от среза выходного сечения прототипа до мишени – 20 мм. При испытаниях прототипа удельные потери кинетической энергии ускоренных частиц в нейтральном газе значительно ниже, чем при испытаниях
Таблица 1. Экспериментальные замеры тяги одиночной ИОС
Table 1. Experimental measurements of the thrust of a single IOS
|
Напряжение, В Давление, Па |
670 |
740 |
770 |
|
18 |
0.294 мкН |
- |
- |
|
20 |
- |
0.178 мкН |
0.166 мкН |
|
32 |
0.11 мкН |
- |
- |
Таблица 2. Экспериментальные значения тяги прототипа УМД при работе на разных газах
Table 2. Experimental thrust values of the prototype АМТ when operating on different gases
|
Давление, Па Газ |
3.4 |
3.7 |
3.9 |
4.2 |
4.4 |
4.5 |
4.8 |
5 |
5.2 |
5.8 |
6.2 |
|
He |
- |
- |
- |
- |
- |
- |
1.92 |
- |
1.52 |
- |
- |
|
CO2 |
- |
- |
1.66 |
2.37 |
2.53 |
- |
- |
- |
- |
- |
- |
|
N 2 |
3.24 |
5.23 |
- |
- |
- |
- |
- |
- |
- |
- |
- |
|
Воздух |
- |
- |
- |
- |
- |
8.3 |
- |
7.52 |
- |
- |
- |
|
Ar |
- |
- |
- |
- |
- |
- |
- |
- |
- |
13.02 |
9.6 |
ИОС. Смещение пятна лазера находилось в диапазоне 20–45 мм, что снижает погрешность измерения углов α и β. Значения тяг, полученные для разных газов по формуле (2), сведены в табл. 2. Значения тяг приведены в мкН.
Из табл. 2 видно, что наибольшей величиной тяги отличаются газы с наибольшей молекулярной массой. При этом в ряду фоновых давлений остаточного газа для каждого вида газа существует область оптимального давления, при котором стенд показывает наибольшее значение тяги. Увеличение остаточного давления ведёт к увеличению количества ионизированных частиц до тех пор, пока подвижность заряженных частиц остаётся высокой. Таким образом, с одной стороны, рост давления ведёт к росту массового расхода ионов, соответственно, тяга растёт.
С другой стороны, рост давления увеличивает сопротивление среды, энергия, теряемая ионом в остаточном газе, увеличивается. Скорость ионов падает, и тяга уменьшается. Отсюда следует, что существует давление, обеспечивающее максимальную тягу прототипа УМД (максимальный ионный расход при минимальных потерях кинетической энергии), что и отображается в табл. 2.
Список литературы Измерение реактивной тяги ионных двигателей методом двойного угла
- Biagioni L., Cesari U., Saverdi M., Andrenucci M. Development status of the HT‑100 miniaturized hall effect thruster system, 41st AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, 2005, 38–75.
- Ito T., Gascon N., Crawford W. S., Cappelli M. A. Further development of a micro Hall thruster, 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit, 2006, 1–9.
- Ito T., Gascon N., Crawford W. S., Cappelli M. A. Experimental characterization of a micro-Hall thruster, Journal of Propulsion and Power, 2007, 23(5). 1068–1074.
- Гопанчук В. В., Потапенко М. Ю. Электрореактивные двигатели для малых космических аппаратов, Вестник Балтийского федерального университета им. И. Канта. Серия: Физико-математические и технические науки, 2012, (4), 60–67. [Gopanchuk V. V., Potapenko M. Yu. Electric propulsion engines for small spacecraft, Vestnik Baltijskogo federal’nogo universiteta im. I. Kanta. Seriya: Fiziko-matematicheskie i tekhnicheskie nauki, 2012, (4), 60–67. (in Rus.)]
- Fan H., Ding Y., Wang L., Chen Z., Zhang Y., Wei L., Yu D. Effects of Gas Supply Direction on the Discharge Characteristics of a Low-power Hall Thruster, Vacuum, 2020, 1–9.
- Koizumi H., Kuninaka H. Switching Operation of Ion Beam Extraction and Electron Emission Using the Miniature Ion Thruster μ1, Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan, 2010, 8(27), 85–90.
- Koizumi H., Kuninaka H. Performance evaluation of a miniature ion thruster μ1 with a unipolar and bipolar operation, Proc. 32nd Int. Elect. Propuls. Conf, 2011, 1–10.
- Trudel T. A., Bilén S. G., Micci M. M. Design and performance testing of a 1-cm miniature radio-frequency ion thruster, The 31st International Electric Propulsion Conference, 2006, 1–6.
- Taunay P. Y. C. R., Bilén S. G., Micci M. M. Numerical simulations of a miniature microwave ion thruster, 33rd Int. Elect. Propuls. Conf, 2013, 1–18.
- Loeb H. W., Schartner K. Development Of RIT-Microtrhusters. In: 55 th International Astronautical Congress, 2004.
- Collingwood C. M., Gabriel S. B., Corbet, M. H., Jameson P. The MiDGIT thruster: Development of a multi-mode thruster, 31st International Electric Propulsion Conference, Ann Arbor, Michigan, 2009, 1–13.
- Вавилов И. С., Локотаев Д. В., Ячменев П. С., Федянин В. В., Жариков К. И., Степень П. В., Лукьянчик А. И. Обзор известных силовых способов измерения реактивной тяги ионных двигателей: торсионные маятники, Журнал Сибирского федерального университета. Серия: Техника и технологии, 2024, 17(2), 214–238. [Vavilov I. S., Loktaev D. V., Yachmenev P. S., Fedyanin V. V., Zharikov K. I., Degree P. V., Lukyanchik A. I. Overview of known power methodsfor measuring the jet thrust of ion engines: torsion pendulums, ZHurnal Sibirskogo federal’nogo universiteta. Seriya: Tekhnika i tekhnologii, 2024, 17(2), 214–238. (in Rus.)]
- Вавилов И. С., Ячменев П. С., Федянин В. В., Жариков К. И., Степень П. В., Лукьянчик, А. И., Кузьменко И. А. Двухзазорный СВЧ‑ионный двигатель и его исследование аэродинамическим методом, Омский научный вестник. Серия Авиационно-ракетное и энергетическое машиностроение, 2022, 6(1), 109–117. [Vavilov I. S., Yachmenev P. S., Fedyanin V. V., Zharikov K. I., Degree P. V., Lukyanchik, A. I., Kuzmenko I. A. Two-gas microwave ion engine and its study by aerodynamic method, Omskij nauchnyj vestnik. Seriya Aviacionno-raketnoe i energeticheskoe mashinostroenie, 2022, 6(1), 109–117. (in Rus.)]
