Изучение характера взаимодействия пальцев полотняно-транспортёрного подборщика с валком в зоне подбора

Автор: Красноступ Станислав Маркович, Лесняк Ольга Николаевна, Азаров Анатолий Дмитриевич
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 10 (61) т.11, 2011 года.
Бесплатный доступ
С целью выявления причин возникновения потерь зерна за полотняно-транспортёрным подборщиком определён характер взаимодействия пальцев подборщика с валком в зоне его подбора. Отмечено, что основные потери за подборщиком возникают в зоне подбора валка в результате вымолота зерна деформированными пальцами подборщика. Установлена зависимость потерь зерна от деформации пальцев подборщика.
Полотняно-транспортёрный подборщик, валок, деформации пальцев, потенциальная энергия, вымолот зерна
Короткий адрес: https://sciup.org/14249513
IDR: 14249513 | УДК: 631.354.2
Study on interaction nature of canvas conveyer pick-up fingers with roll in pickup zone
For the purpose of revealing the causes of grain loss after the canvas conveyer pick-up with roll, the interaction nature of its fingers in the pickup zone is determined. It is observed that the basic losses after the picker in the pickup zone of the roll are caused by its deformed fingers. The dependence of the grain loss on the deformation of pickers fingers has been established.
Текст научной статьи Изучение характера взаимодействия пальцев полотняно-транспортёрного подборщика с валком в зоне подбора
Введение. Проблема потерь выращенного урожая достаточно сложна и многокомпонентна, она состоит из ряда причин, одна из которых — это уборочные потери, в частности, потери за подборщиком при уборке урожая раздельным комбайнированием [1—3].
Анализ научно-технической и патентной литературы показал, что из всего парка уборочных машин наименее изученным с точки зрения возникновения потерь зерна является подборщик. Особенно это относится к полотняно-транспортёрному подборщику, допускающему наименьшие потери зерна среди всех имеющихся типов подборщиков. Именно наличие наименьших потерь обуславливает наибольшее предпочтение в использовании полотняно-транспортёрных подборщиков, как в нашей стране, так и за рубежом.
Однако, как показывает практика, потери зерна и за полотняно-транспортёрным подборщиком значительно превышают нормативные [2, 3].
Имеющиеся аналитические исследования в большинстве своём относятся к подборщикам барабанного типа, которые конструктивно отличаются от полотняно-транспортёрного подборщика, а значит, приводимые в литературе рекомендации для полотняно-транспортёрного подборщика могут быть использованы лишь частично, и на сегодняшний день полотняно-транспортёрный подборщик остаётся наиболее востребованным, но наименее изученным.
Это обстоятельство позволяет сделать вывод, что в настоящее время рассмотрены не все аспекты проблемы возникновения уборочных потерь и задача по сокращению потерь зерна за подборщиками, особенно за полотняно-транспортёрным подборщиком, является актуальной. Постановка рабочей гипотезы, цели и задачи исследования. В связи с этим проведён анализ и предложена систематизация причин возникновения потерь зерна за полотнянотранспортёрным подборщиком [1]. Данное исследование показало, что в общем объёме потерь за подборщиком, наряду с вышеуказанными потерями, особое место занимают потери зерна в зоне подбора валка от ударного воздействия деформированных пальцев по нижней части валка.
Как известно, на качество подбора валка влияют условия, в которых работает подборщик, в частности, высота расположения валка на стерне.
В зависимости от расположения валка на стерне платформа подборщика с прикреплёнными на ней подбирающими пальцами устанавливается на различную высоту над уровнем почвы.
Это обстоятельство позволяет выделить три вариации работы подборщика.
Первая, когда пальцами подборщика подбирается правильно сформированный валок и платформа подборщика установлена на рекомендуемом агротехническими нормами расстоянии от почвы.
Вторая — валок расположен на короткой стерне, высота которой не превышает 12 см.
Третья (худший случай) — валок расположен на почве.
Во втором и третьем случаях в целях более тщательного подбора урожая платформа подборщика устанавливается на высоту порядка 100 мм.
В процессе данной установки платформы подбирающие пальцы, находящиеся на нижней ветви транспортёра, прочёсывая стерню, вплоть до зоны подбора постоянно погружены в почву. Взаимодействие пальцев подборщика с почвой приводит к их деформации, т. е. к моменту встречи с валком палец подборщика находится в деформированном состоянии.
Следует отметить также, что деформации пальцев возможны и при нормативной установке платформы подборщика над почвой — в результате соприкосновения с неровностями почвенного покрова и (или) при запутывании их в стерне. В процессе деформации палец накапливает потенциальную энергию, которая в момент выхода из почвы переходит в кинетическую энергию ударного воздействия по нижней части валка в зоне подбора, в результате чего могут наблюдать ся (даже при рекомендованных кинематических режимах работы подборщика) потери зерна молотом [4, 5].
вы-
пота к
Это даёт основание выдвинуть гипотезу о том, что при работе подборщика основные тери зерна в зоне подбора при взаимодействии пальца подборщика с нижней частью валка, как это взаимодействие носит ударный характер.
Учитывая вышеизложенное, поставлена цель исследования — повышение качества подбора валка полотняно-транспортёрным подборщиком.
Объектом исследования является зона подбора валка.
Предмет исследования — процесс взаимодействия пальцев полотняно-транспортёрного подборщика с нижней частью валка в зоне подбора.
Научная задача исследования — разработка способов сокращения потерь зерна за полотняно-транспортёрным подборщиком.
Для достижения указанной цели сформулированы следующие частные научные задачи:
-
1. Изучить технологический процесс подбора валка полотняно-транспортёрным подборщиком, в частности, кинематику движения пальцев подборщика на нижней ветви транспортёра при различных условиях эксплуатации.
-
2. Получить универсальную модель валка, позволяющую изучить процесс подбора валка во всех зонах взаимодействия пальцев подборщика с валком.
-
3. Теоретически исследовать процесс взаимодействия пальца подборщика с нижней частью валка в зоне подбора.
-
4. Математически описать влияние условий уборки на потери зерна вымолотом, определить адекватность модели.
Изучение характера взаимодействия пальцев полотняно-транспортёрного подборщика с валком в зоне подбора. В процессе решения первой частной задачи получена [6] траектория движения пальца полотняно-транспортёрного подборщика, находящегося на нижней ветви транспортёра при различных условиях работы подборщика.
Указанная траектория представлена на рис. 1.
В процессе подбора валка палец подборщика (который представляется одним зубцом) — отрезок КМ — совершает поступательное движение 1 совместно с уборочной машиной и вращательное 2 с валом подборщика 5(рис. 1). В том случае, если палец подборщика не контактирует с почвой, траектория конца его пальца будет описываться трохоидой 3. Если же палец контактирует с почвой (отрезок КМ^, то он деформируется и вид его траектории изменяется (положение 4).
Положения пальца в разные моменты времени изображены прямолинейными отрезками, при этом верхние точки связаны с валом транспортёра. Условно можно сказать, что конечная точка пальца до соприкосновения его с почвой движется по трохоиде, затем, контактируя с почвой, — по прямой и после выхода из почвы — вновь по трохоиде.
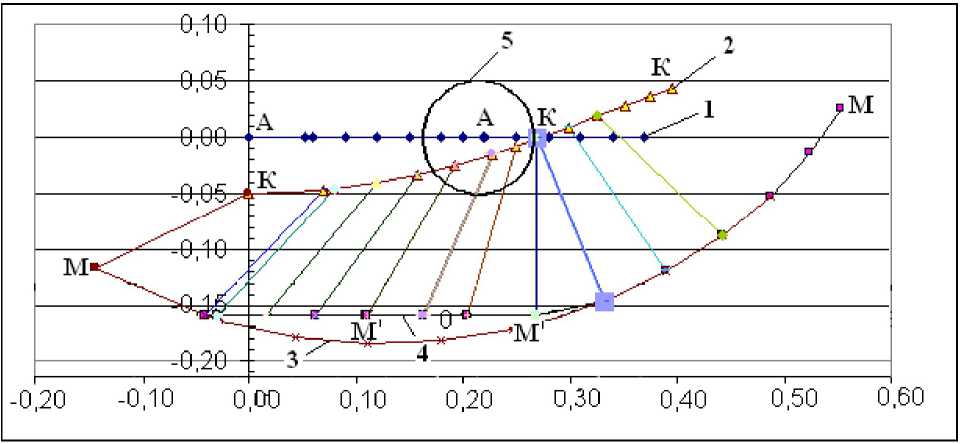
Рис. 1. Траектория движения пальца подборщика в процессе подбора валка
На рис. 1 (и последующих рисунках) деформированный палец изображён наклонным отрезком, так как при графическом построении соединяются прямой линией две концевые точки — точка К и точка М'.
В рамках решения второй частной задачи конфигурация нижней части валка представляется уравнением цепной линии [7], которое имеет вид
/ у .X-Z , у(х) = а ch--1
v ( а
Здесь параметр а определён толщиной валка, а длина зоны провисания валка z получается численно, с учётом высоты «крепления» валка к валу подборщика.
Для реализации третьей задачи соединим валок с валом подборщика следующим образом.
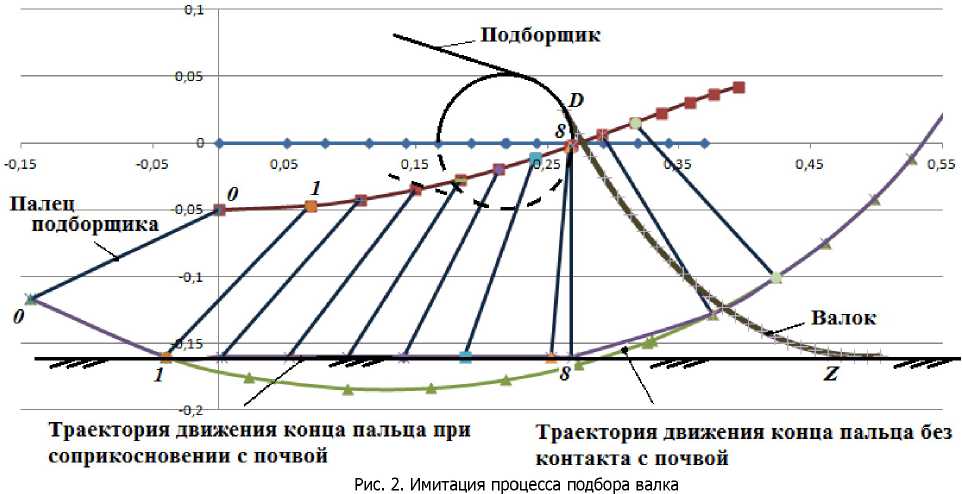
Пусть валок имеет две концевые точки — точку D и точку Z (рис. 2). В соответствии с реальным положением валка в процессе подбора считаем, что в зоне подбора валок начинается в точке D, которая находится на валу подборщика, затем свисает вниз и в точке Z по касательной ложится на почву. Положение точки D выбрано так, что касательная в этой точке является одновременно касательной к валу подборщика и к свисающему валку [7].
Примем, что движение пальца начинается с положения 0—0. В этом положении палец не испытывает деформации, так как не взаимодействует с почвой (рис. 2). Деформацией пальца, возникающей при прочёсывании стерни, пренебрегаем ввиду её малости по сравнению с деформацией пальца при контакте его с почвой. Начиная с положения 1—1 и вплоть до положения 8— 8, палец контактирует с почвой и находится в деформированном состоянии. Положение пальца 8—8 — это положение пальца в зоне подбора валка. В данном случае это граничное положение, характеризующее палец в момент выхода его из почвы.
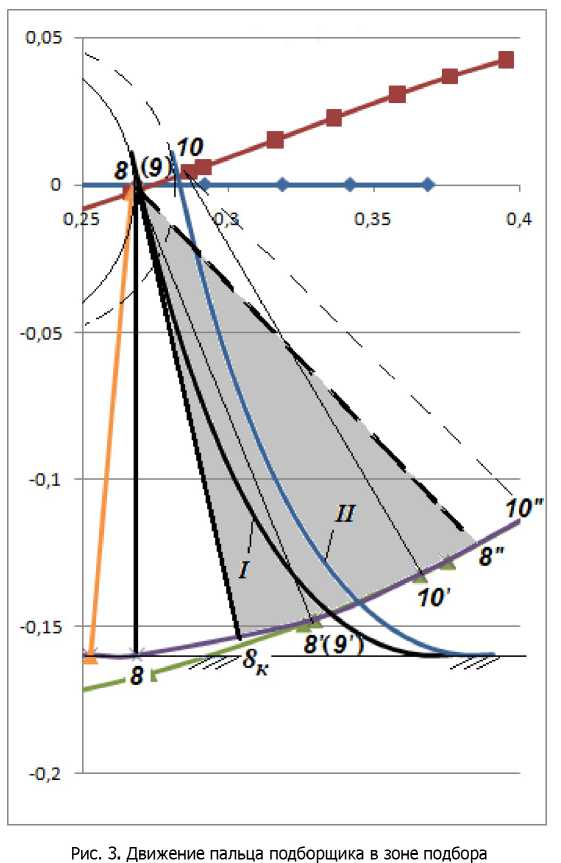
Выходя из почвы (из положения 8—8), палец выпрямляется, движется вперёд и вверх, совершая затухающие колебания относительно своего недеформированного положения 8—8'. Если на пути пальца препятствия в виде валка нет, то далее он проходит положение 8—8', которое имел бы при отсутствии взаимодействуя с почвой, и стремительно доходит до положения 8—8" (рис. 3). Затем палец, вращаясь совместно с валом подборщика, поднимается наверх и совершает поступательное движение вперёд совместно с уборочной машиной.
Однако на пути пальца, освободившегося от контакта с почвой, находится валок I. Накопленная пальцем в процессе деформации потенциальная энергия в момент его «выхода из почвы» переходит в кинетическую энергию ударного воздействия, и, как видно из рис. 3, освободившийся палец ударяет по валку I практически всей своей подбирающей частью. Следует отметить, что положение 8—8' соответствует наибольшему ударному воздействию пальца по валку и вымолоту зерна.
Таким образом, можно констатировать, что ударная зона пальца по валку начинается с позиции пальца 8— 8К и заканчивается положением 8—8". На рис. 3 эта зона представлена тонированной.
С учётом поступательного движения комбайна ударная зона будет перемещаться вперёд и под ударом окажется валок, находящийся в положении II.
Для определения потенциальной энергии, накопленной пальцем к моменту «выхода» его из почвы, рассмотрим изменение величины деформации пальца от момента «контакта» с почвой до «выхода» его из почвы в зависимости от установки подборщика над почвой, причём чем ниже устанавливается подборщик, тем больше «углубление» пальцев в почву.
Предполагаем, что палец не углубляется в почву, а скользит по ней. «Глубину погружения» пальцев подборщика в почву варьируем от 0,7 до 3 см [4].
Процесс деформации пальца отображается изменением угла между пальцем подборщика и касательной к окружности вала, проведённой в точке крепления пальца к валу подборщика. Чем меньше это угол, тем больше деформация пальца [4].
Для получения численных расчётов приняты характеристики прототипа пружинного пальца полотняно-транспортёрного подборщика ППТЗ-А: длина пальца подборщика — 0,158 м; расстояние от центра вала до конца пальца —0,185 м; угол наклона пальца к касательной в точке крепления — 25° [8].
В результате в работе [4] получены графики деформации пальца подборщика и накопленной им потенциальной энергии в зависимости от времени и положения установки подборщика над почвой, представленные на рис. 4.
Из полученных графиков, представленных на рис. 4, видно, что зависимости деформации и накопленной потенциальной энергии от времени имеют нелинейный и подобный характер.
Высота установки подборщика над почвой (т. е. степень деформирования пальцев) форму зависимостей практически не меняет, но влияет на величины рассматриваемых характеристик. С момента контакта пальца подборщика с почвой деформация пальца (и, соответственно, энергия) возрастает, достигая максимального значения в момент, предшествующий отрыву пальца от почвы (точка 6, рис. 4). В момент выхода пальца из почвы деформация пальца (и энергия соответственно) несколько уменьшается за счёт вращательного движения вала подборщика и подъёма пальца вверх. К моменту выхода пальца из почвы (точка 8, рис. 4) накопленная потенциальная энергия составляет некоторую часть от максимального значения.
Так, например, для «погружения» 0,7 см потенциальная энергия при «выходе пальца из почвы» (в точке 8) равна 0,0032 Дж, а для «погружения» 1 см — 0,03 Дж.
В свою очередь, «глубину погружения» пальца в почву можно выразить через величину деформации пальцев подборщика и с учётом определённых математических преобразований получить зависимость скорости удара пальцев по колосьям от накопленной пальцем в процессе де-
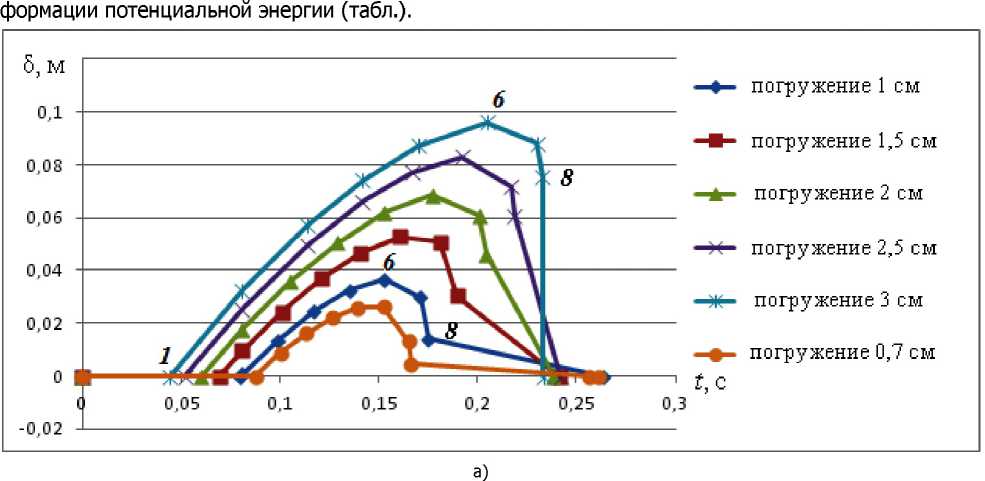
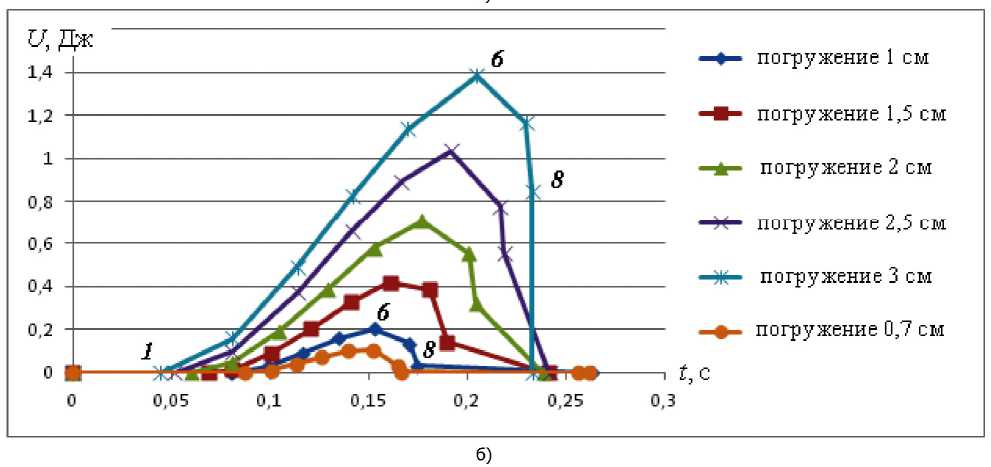
Рис. 4. Графики зависимости от времени и положения установки подборщика над почвой: а — деформации пальца подборщика, б — накопленной потенциальной энергии
Зависимость скорости конечной точки Мот накопленной пальцем в процессе деформации потенциальной энергии
|
Глубина погружения, м |
Потенциальная энергия, Дж |
Круговая частота колебаний пальца, с-1 |
Период колебаний, с |
Скорость конечной точки М пальца, м/с |
|
0,007 |
0,0032 |
13,14 |
0,478 |
1,50 |
|
0,010 |
0,0298 |
40,14 |
0,157 |
4,58 |
|
0,015 |
0,1390 |
86,65 |
0,073 |
9,88 |
|
0,020 |
0,3180 |
131,07 |
0,048 |
14,94 |
|
0,025 |
0,5580 |
173,53 |
0,036 |
19,78 |
|
0,030 |
0,8500 |
214,00 |
0,030 |
24,41 |
Следует отметить, что в реальных условиях почва не является абсолютно твёрдой, а прототип пальца подборщика ППТ-ЗА имеет конструктивные ограничения. Так, например, расстояние от точки крепления к полотну до конца пальца подборщика около 7 см, следовательно, деформации, равные или превышающие это значение, недопустимы. Более того, в силу механических свойств пальца подборщика значительными являются уже деформации порядка 3 см [5].
Анализ потерь зерна за полотняно-транспортёрным подборщиком. Для анализа потерь зерна за подборщиком рассмотрим результаты моделирования, соответствующие «погружению» пальца на 0,7 см и на 1 см. В этих случаях наибольшие деформации пальца не превышают 3,7 см.
Значение деформации при «погружении» в почву пальцев подборщика меньше, чем на 0,7 см, не учитывается, так как при данных условиях потенциальная энергия к моменту выхода пальца из почвы практически равна нулю.
Металлический пружинный палец, которым оснащён полотняно-транспортёрный подборщик, не способен к значительному рассеянию энергии, поэтому считаем, что вся накопленная пальцем в процессе деформации энергия будет расходоваться на удар.
Итак, как следует из табл., накопленная пальцем потенциальная энергия к моменту встречи его с валком составляет 0,0032—0,0298 Дж (скорость удара в этом случае от 1,5 до 4,6 м/с). В соответствии с характеристиками связи зерна с колосом полученные значения потенциальной энергии и скорости удара более чем достаточны для вымолота зерна, так как затраты на вымолот одного зерна в период уборки составляют порядка 0,003—0,015 Дж [9].
Определим численно потери зерна за полотняно-транспортёрным подборщиком. Для этого предположим, что одним пальцем, состоящим из сдвоенного зубца, за один контакт с нижней частью валка будет выбито минимум два зерна, и найдём наименьшие количественные потери зерна вымолотом его пальцами подборщика за уборочный период.
Считаем, что подборщиком подбирается валок, расположенный на почве, и все пальцы подборщика, находясь на нижней ветви транспортёра, контактируют с почвой и деформируются. Если принять коэффициент кинематического режима работы подборщика Л = 1,3, расстояние между рядами пальцев по ходу полотна 0,155 м, количество пальцев — 216 штук [8], то в этом случае линейная скорость транспортёра VTp = 0,35 м/с.
При данных условиях примерно через каждые 0,4 с последующий палец будет занимать место предыдущего, то есть через каждые 0,4 с происходит контакт пальца с валком, который носит ударный характер, в результате которого выбивается два зерна. Считаем, что в сутки комбайн работает 10 часов, тогда за это время пальцами подборщика, состоящими из сдвоенных зубцов, будет произведено 72 000 ударов и выбито минимум 144 000 зёрен. Принимаем абсолютный вес 1000 штук зерновых семян 30 г [10], тогда наименьшие потери за подборщиком составят 4,3 кг. За 10 уборочных дней — порядка 45 кг (а за 14 дней — 60 кг).
По данным СМИ, средняя урожайность по Южному региону в 2011 году составила порядка 30 ц/га. Допускаемые нормативные потери за подборщиком 0,5 % от выращенного урожая, следовательно, при указанной урожайности это порядка 15 кг. В нашем случае потери за подборщиком могут составить порядка 45—60 кг, что примерно в 3^4 раза превышает нормативные при указанной урожайности.
Заключение. Учитывая вышеизложенное, можно сделать вывод, что для сокращения потерь зерна за полотняно-транспортёрным подборщиком (впрочем, как и за любым другим типом подборщика) необходимо уменьшать ударное воздействие пальцев по нижней части валка, возникающее вследствие деформации пальцев. Это можно реализовать, если понизить величину накопленной в процессе деформации пальца потенциальной энергии или ограничить движение пальца в ударной зоне.
Список литературы Изучение характера взаимодействия пальцев полотняно-транспортёрного подборщика с валком в зоне подбора
- Лесняк, О. Н. Анализ причин возникновения потерь урожая зерновых культур/О. Н. Лесняк//Состояние и перспективы развития сельскохозяйственного машиностроения: мат-лы 4-й Междунар. науч.-практ. конф. в рамках 14-й Междунар. агропромышленной выставки «Интерагромаш-2011» (г. Ростов-на-Дону, ВЦ «ВертолЭкспо» 2-3 марта 2011 г.). -Ростов-на-Дону, 2011. -430 с.
- Комарова, М. К. Борьба с потерями зерновых колосовых/М. К. Комарова, В. И. Недовесов. -Москва: Россельхозиздат, 1975. -160 с.
- Каскулов, М. Х. Проблемы уменьшения потерь зерна при уборке зерновых культур/М. Х. Каскулов, Ю. А. Шекихачев, М. Н. Малухов//Вопросы сельскохозяйственного производства: сб. науч. тр. -Москва, 1988. -143 с.
- Красноступ, С. М. Анализ влияния условий подбора на характер потерь зерна за полотняно-транспортёрным подборщиком/С. М. Красноступ, О. Н. Лесняк, А. Д. Азаров//Состояние и перспективы развития сельскохозяйственного машиностроения: мат-лы междунар. науч.-практ. конф., 26-29 марта 2008 г./Ростовская гос. академия сельхозмашиностроения. -Ростов-на-Дону, 2008. -323 с.
- Красноступ, С. М. К вопросу о влиянии механических свойств пальцев подборщика на потери зерна/С. М. Красноступ, О. Н. Лесняк, А. Д. Азаров//Современные инновационные технологии в сельскохозяйственном машиностроении: мат-лы межрегион. науч.-практ. конф., 28-31 марта/Ростовская гос. академия сельхозмашиностроения. -Ростов-на-Дону, 2007.
- Красноступ, С. М. Анализ кинематики движения пальца полотняно-транспортёрного подборщика в зоне подбора валка/С. М. Красноступ, О. Н. Лесняк, А. Д. Азаров//Новые технологии, конструкции и процессы производства: сб. науч. тр./Ростовская гос. академия сельхозмашиностроения. -Ростов-на-Дону, 2008. -182 с.
- Лесняк, О. Н. Новые представления о форме валка в процессе подбора его подборщиком/О. Н. Лесняк, С. М. Красноступ, А. Д. Азаров//Новые технологии, конструкции и процессы производства/Ростовская гос. академия сельхозмашиностроения. -Ростов-на-Дону, 2008. -182 с.
- Подборщик полотняно-транспортный ППТ-3/Северо-Кавказский межотраслевой центр научно-технической информации. Завод Миллеровосельмаш. -1975. -36 с.
- Клёнин, Н. И. Сельскохозяйственные и мелиоративные машины/Н. И. Клёнин, В. А. Сакун. -Москва: Колос, 1994. -751 с.
- Справочник конструктора сельскохозяйственных машин: в 4 т./под ред. М. И. Клёцкина. -Изд. 2-е. -Москва: Машиностроение, 1967-1969. -536-830 с.
