Эффективная транспортная система для доставки экипажа на лунную базу

Автор: Муртазин Р.Ф., Беляева Е.К., Беглов Р.И.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 2 (45), 2024 года.
Бесплатный доступ
В работе предложен альтернативный подход для эффективного транспортного обеспечения лунной базы после этапа её развёртывания с помощью ракеты-носителя (РН) тяжёлого класса «Ангара-А5В», для чего предлагается рассмотреть использование околоземной и окололунной станций. На окололунной станции, расположенной на высокой круговой орбите, размещается многоразовый лунный корабль для посадки на Луну. В работе показано, что по предложенному критерию эффективности транспортная система, использующая пилотируемый транспортный корабль «Орёл» для перелётов между станциями, превосходит планируемую на сегодня схему на базе двух РН сверхтяжёлого класса на 13%. Размещение на околоземной станции многоразового пилотируемого корабля в качестве средства для перелётов повысит эффективность альтернативной транспортной системы уже на 42%.
Транспортная система для лунной базы, многоразовый пилотируемый корабль, многоразовый лунный корабль, высокая лунная орбита
Короткий адрес: https://sciup.org/143183276
IDR: 143183276 | УДК: 629.788:523.34
Efficient transportation system for crew delivery to a lunar base
The paper proposes an alternative approach to providing an efficient transportation support for a lunar base after it has been deployed using the heavy launch vehicle (LV) Angara-A5V, to which end it suggests to use stations both in low-Earth and circumlunar orbits. The circumlunar station placed in a high circular orbit is to host a reusable lunar lander. The paper demonstrates that, by the proposed efficiency criterion, a transportations systems that uses the crew transportation spacecraft Orel for transfers between the stations exceeds by 13% the currently adopted concept based on two super-heavy LVs. Basing at a station in low-Earth orbit a reusable crew transportation spacecraft to be used as the vehicle for transfers will improve the efficiency of the alternative transportation system by as high as 42%.
Текст научной статьи Эффективная транспортная система для доставки экипажа на лунную базу
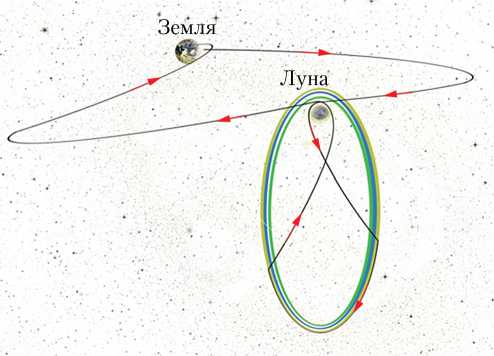
Основными крупными проектами пилотируемой космонавтики за последние 50 лет являются околоземные станции. Следующий шаг в её развитии видится в организации пилотируемых полётов за пределы земных орбит. В качестве транспортного узла для миссий в дальний космос рассматриваются лунные орбитальные станции (ЛОС), например, Deep Space Gateway на высокоэллиптической лунной гало-орбите ( NRHO — Near-Rectilinear Halo Orbit ) с высотами пери- и апоцентра 2 500 и 75 000 км соответственно (рис. 1, а ) [1]. В перспективе планируется создание лунных баз (ЛБ) в районе Южного полюса, где в кратерах были открыты большие запасы воды в виде льда (рис. 1, б ). В частности, согласно недавно подписанному между Россией и Китаем проекту, предполагается совместное создание на Луне Международной лунной исследовательской станции ( ILRS — International Lunar Research Station ) [2].
По сути, человечество стоит на пороге новой экспансии. Из истории известно, что экспансии эпохи Великих географических открытий стали возможными при определённых достижениях в кораблестроении. Так, в первой половине XV века в парусном вооружении и судостроении происходит настоящая революция — зарождается классический трёхмачтовый корабль, позволяющий двигаться галсами или при боковом ветре, что давало возможность дальних путешествий. И уже в 1492 г. cостоялась экспедиция Христофора Колумба на трёх таких кораблях («Санта-Мария», «Пинта» и «Нинья»), в результате которой была открыта Америка [3]. Если провести параллель с нашим временем, то очевидно, что лунная экспансия потребует создания своего «трёхмачтового корабля» — надёжной и эффективной транспортной системы (ТС).
а)

б)
Рис. 1. Перспективные космические пилотируемые программы: а — орбита NRHO для лунной орбитальной станции Deep Space Gateway (рисунок из архивов NASA); б — исследовательская база на Южном полюсе Луны [4]
Схемы транспортных системс «прямой» доставкой экипажа к Луне
На сегодня единственная ТС для лунных миссий была реализована в рамках программы «Аполлон». ТС включала в себя пилотируемый корабль (ПК) и лунный взлётно-посадочный корабль (ЛВПК), состоящий из посадочной ступени (ПС) и взлётного модуля (ВМ). ПК и ЛВПК выводились совместно на околоземную орбиту с помощью сверхтяжёлой ракеты-носителя (РН) «Сатурн-5» грузоподъёмностью ~140 т [5]. Схема включала промежуточную стыковку ПК и ВМ, стартующего с поверхности Луны, на низкой окололунной орбите (НОО). Масса ЛВПК составляла ~15 т, что позволяло обеспечить условия для трёхсуточного пребывания на Луне двух астронавтов (рис. 2). Если проводить историческую аналогию, то программа
«Аполлон» была ближе к первым парусным лодкам викингов, достигшим берегов Америки. Несмотря на первую высадку людей с помощью этой ТС, о серьёзном освоении Луны не могло быть и речи. К тому же высокая стоимость программы «Аполлон» привела к досрочному её завершению.
Спустя 50 лет в той же парадигме, что и программа «Аполлон», предполагается реализовать ТС в Российской лунной программе. Согласно схеме [6], с помощью двух РН сверхтяжёлого класса (СТК) на НОО выводятся пилотируемый транспортный корабль (ПТК) «Орёл» и ЛВПК. Проектная масса этих элементов на НОО должна составлять 22,0 т и 27,0 т соответственно [7]. При условии использования кислородно-водородного разгонного блока тяжёлого класса (КВТК) с удельным импульсом Р уд = 470 с для выполнения отлётного импульса к Луне требуемая грузоподъёмность РН СТК на околоземной орбите выведения должна быть не менее 115 т. После стыковки экипаж из четырёх космонавтов переходит в ЛВПК для двухнедельной экспедиции на поверхности Луны. По некоторым оценкам, для построения лунной базы потребуется не менее 400 человеко-выходов на лунную поверхность, для чего необходимо выполнить около 10 таких парных запусков.
Оценочные массовые характеристики отдельных элементов ЛВПК при двух- пусковой схеме:
Посадочная ступень:
конструктивная масса 4,0 т;
масса топлива 13,4 т;
Взлётный модуль:
конструктивная масса 4,8т;
масса топлива 4,8т;
ЛВПК:
конструктивная масса 8,8т;
масса топлива 18,2т;
масса экипажа 0,32т;
суммарная масса 27,32т.
Конструктивная масса посадочной ступени принята из предположения размещения в ней шлюзовой камеры (ШК). При оценках масс учитывалось, что требуемые характеристические скорости Vx для посадки ЛВПК с НОО на Луну и взлёта на НОО составляют 2 100 и 2 000 м/с соответственно при удельном импульсе двигательных установок ПС и ВМ Руд = 325 с.
Четырёхпусковая схема полёта к Луне с использованием Российской орбитальной станции
Временная приостановка разработки РН СТК приводит к переносу сроков создания лунной базы. Так, если оценивать реальный срок создания такой РН в 10–12 лет, то перспективы первого полёта ПТК «Орёл» к Луне сдвигаются к 2035 г. Чтобы ускорить полёт ПТК к Луне, в 2021 г. рассматривалась четырёхпусковая схема полёта с высадкой на Луну, с включением околоземной орбитальной станции (ОС) в качестве пункта для промежуточной остановки ПТК [8]. Актуальность этого подхода подтверждается тем, что в сентябре 2021 г. на совместном заседании НТС Роскосмоса и Бюро Совета РАН по космосу рекомендовалось активно использовать будущую Российскую орбитальную станцию (РОС) в лунной программе [9].
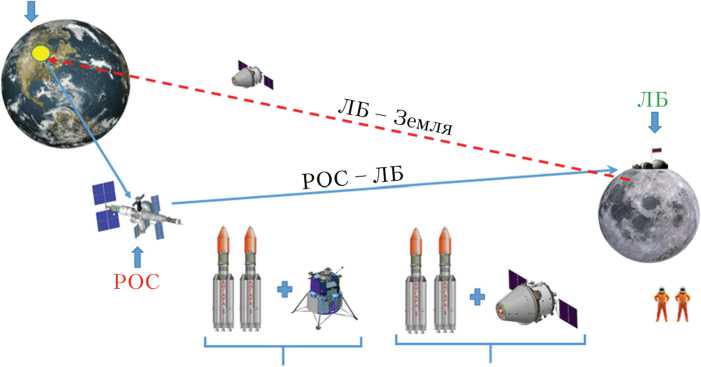
Четырёхпусковая схема разбивается на два кластера (рис. 3) [8]. В первом кластере ЛВПК достав- ляется на НОО по двухпусковой схеме, включающей выведение на РН тяжёлого класса «Ангара-А5В» (А5В) на околоземную орбиту ЛВПК в связке с межорбитальным буксиром (МБ). После стыковки связки ЛВПК+МБ с КВТК, запущенным на орбиту искусственного спутника Земли (ОИСЗ) с помощью А5В, разгонный блок КВТК выполняет отлётный импульс на высокоэллиптическую орбиту. Окончательный отлёт к Луне и последующий переход на НОО осуществляется с помощью МБ.
Во втором кластере пилотируемый корабль ПТК, выводимый совместно с МБ, доставляется на РОС, где ожидает запуска КВТК. После стыковки с КВТК,
ЛБ
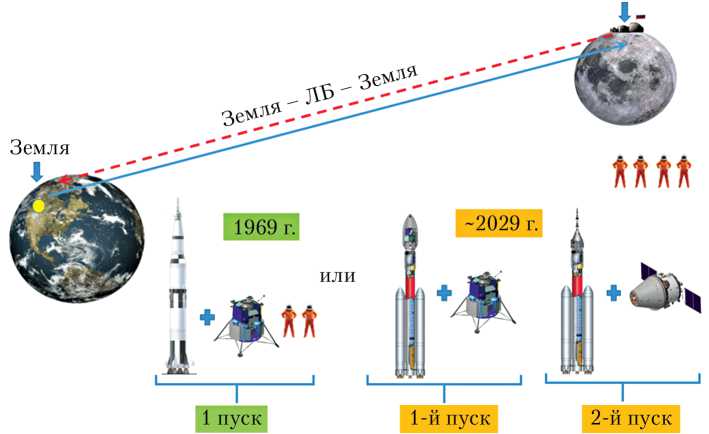
Рис. 2. Схемы транспортных систем с «прямой» доставкой экипажа к Луне: однопусковая схема программы «Аполлон» на базе ракеты-носителя «Сатурн-5» (зелёный); двухпусковая схема на базе ракеты-носителя сверхтяжёлого класса (оранжевый); ЛБ — лунная база (рисунок создан авторами)
Земля
1-й кластер 2-й кластер
Рис. 3. Четырёхпусковая схема полёта к Луне с использованием Российской орбитальной станции (РОС) на базе ракеты-носителя тяжёлого класса «Ангара-А5В»: ЛБ — лунная база (рисунок создан авторами)
ПТК по схеме, рассмотренной для первого кластера, доставляется на НОО, где стыкуется с ЛВПК.
В расчётах принималось, что при беспилотном запуске РН А5В способен вывести на ОИСЗ высотой 200 км и наклонением 51,6° полезную нагрузку массой ~37,7 т, а при наклонении 96,8° — нагрузку массой ~34,2 т. С такой грузоподъёмностью стартовая масса ПТК и достижимая масса ЛВПК на НОО составляют ~19 т [8], что позволяет осуществить высадку на Луну только двух космонавтов. Для обеспечения жизнедеятельности экипажа в течение двух недель требуется «опережающая» доставка в район посадки ЛВПК лунного грузового корабля, т. е. необходим ещё один дополнительный двухпусковый кластер, и, таким образом, вся схема превращается в шестипусковую. Кроме того, эта схема очень чувствительна к возможным переносам запусков РН А5В [8].
Выбор орбиты лунной орбитальной станции
Эффективным подходом по увеличению массы ПТК-М и ЛВПК и снижению чувствительности схемы к переносам запусков может быть использование ЛОС в качестве «базового лагеря». Кроме того, на ЛОС можно расположить многоразовый лунный корабль (МЛК) с функциями взлётного модуля ЛВПК.
Для снижения логистических затрат важным фактором является выбор орбиты для функционирования ЛОС, для чего предлагается разместить ЛОС на полярной высокой лунной орбите (ВЛО) высотой ~10 тыс. км. Преимуществами ВЛО по сравнению с NRHO являются долгосрочная устойчивость орбиты [10] и бóльшие возможности для срочного возвращения экипажа на Землю. Кроме того, неустойчивость NRHO требует частых (одну-две в неделю) высокоточных коррекций, что, по-видимому, потребует упреждающего развёртывания навигационной системы на окололунной орбите.
За счёт «грависфер-ного» способа перехода КА на ВЛО [11, 12] (рис. 4), включающего в себя предварительный перевод МЛК на высокоэллиптическую орбиту с апоселением вблизи грависферы Луны, можно получить снижение затрат характеристической скорости V x . Так, на достижение ВЛО будет затрачено V x на 150 м/с меньше, по сравнению с NRHO , и почти на 550 м/с — по сравнению с переходом на НОО.
Это позволит, при прочих равных условиях, доставлять на ЛОС бóльшую полезную нагрузку.
Согласно схеме «грависферного» перехода, после отлётного импульса Δ V 1 (на рис. 4 не показан) и достижения периселения на высоте H π1 выполняется тормозной импульс Δ V 2 для перехода космического аппарата (КА) на эллиптическую орбиту с расположением апоселения вблизи границы грависферы Луны, которая обозначена фиолетовым цветом. Под действием гравитационных возмущений происходит непрерывная трансформация этой орбиты с изменением высот апоселения и периселения. За счёт правильного выбора высоты апоселения H α можно добиться того, что конечная высота периселения в результате трансформации достигнет необходимой высоты H π 2 без выполнения импульса Δ V 3 . Фактическая траектория перехода на ВЛО, соответствующая этому случаю, представлена на рис. 5.
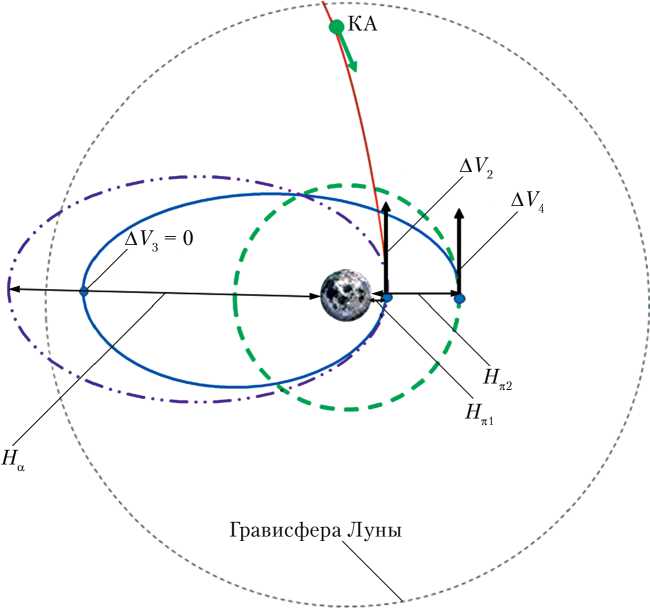
Рис. 4. «Грависферный» переход на полярную высокую лунную орбиту (ВЛО): КА — космический аппарат; H π 1 — высота периселения прилётной орбиты; H π 2 — высота периселения конечной орбиты; H α — начальная высота апоселения переходной орбиты; Δ V 2 — импульс перехода на эллиптическую орбиту; Δ V 3 — импульс формирования целевой высоты периселения; Δ V 4 — импульс перехода на ВЛО [11]
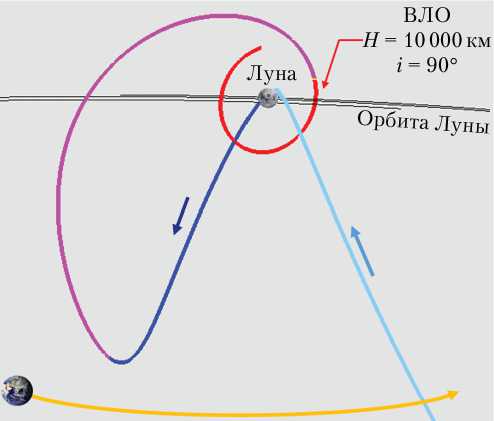
Рис. 5. Траектория перехода на высокую лунную орбиту (ВЛО) по «грависферному» способу: H — высота ВЛО; i — наклонение ВЛО (рисунок создан авторами)
В периселении выполняется тормозной импульс Δ V 4 (рис. 4) для понижения апоселения до высоты ВЛО, после чего КА окончательно переводится на ВЛО. В оптимальную дату суммарные затраты перехода на ВЛО составят Δ V ГСФ = Δ V 2 + Δ V 4 = 0,335 км/с [11].
Четырёхпусковая схема полёта к Луне с использованием Российской орбитальной станции и лунной орбитальной станции
Схема полёта к Луне с использованием РОС и ЛОС на ВЛО представлена на рис. 6. Здесь также в качестве средств выведения используются РН А5В и КВТК. Доставка экипажа на ЛОС осуществляется по двухпусковой схеме. За счёт экономичного достижения ВЛО располагаемая масса ПТК «Орёл» составляет 22,4 т с резервом по V x 350 м/с, достаточным для парирования различных нештатных ситуаций (НШС).
Как уже описывалось выше, на ВЛО можно расположить МЛК, и для сборки всего ЛВПК потребуется доcтавка на ЛОС заправленной посадочной ступени и МБ.
Помимо основной функции, заключающейся в обеспечении перелёта ЛВПК на НОО, а затем МЛК с НОО на ВЛО, МБ выполняет и логистическую доставку топлива для дозаправки МЛК.
Одним пуском РН А5В с КВТК может доставить на ВЛО полезную нагрузку массой 13,8 т. Это, в свою очередь, позволит обеспечить посадку на Луну МЛК с экипажем массой 4 т, что почти в два раза превышает размерность ВМ ЛВПК Eagle из программы «Аполлон» [5].
Массовые характеристики отдельных элементов ЛВПК:
Посадочная ступень:
конструктивная масса 3,2т;
масса топлива 10,6т;
МЛК:
конструктивная масса 3,7т;
масса топлива 3,7т;
ЛВПК:
конструктивная масса 6,9т;
масса топлива 14,3т;
масса экипажа 0,32т;
суммарная масса 21,52т.
Здесь так же, как и в двухпусковой схеме, конструктивная масса посадочной ступени принята из предположения размещения в ней шлюзовой камеры (ШК). При оценках масс учитывалось, что требуемые характеристические скорости V x для посадки ЛВПК с НОО на Луну и взлёта
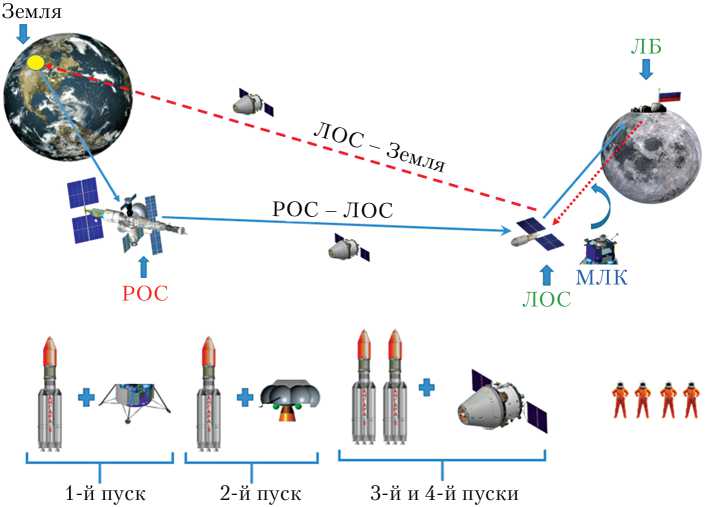
Рис. 6. Четырёхпусковая схема полёта к Луне с использованием Российской орбитальной станции (РОС) и лунной орбитальной станции (ЛОС) на базе ракеты-носителя тяжёлого класса «Ангара-А5В»: ЛБ — лунная база;
МЛК — многоразовый лунный корабль (рисунок создан авторами)
МЛК на НОО составляют 2 100 и 2 000 м/с соответственно при удель- ном импульсе двигательных установок ПС и ВМ Руд = 325 с.
Оценочные массовые характеристики МБ: конструктивная масса 1,5т;
масса топлива 8,6т;
масса топлива для дозаправки МЛК 3,7т;
суммарная масса 13,8т.
Ближайшим аналогом межорбитального буксира может быть РБ «Фрегат».
Предполагается, что топлива в МБ будет достаточно для доставки от ВЛО на НОО ЛВПК с суммарной массой М Σ = 21,5 т, и от НОО на ВЛО — взлётного модуля с экипажем массой 4 т. Характеристическая скорость обоих перелётов составит по 800 м/с.
Эффективность альтернативной ТС достигается за счёт отказа от РН
СТК и перехода с одноразового на частично многоразовый ЛВПК. Включение ЛОС, как базы для МЛК, позволит обеспечить устойчивость четырёхпусковой схемы за счёт допустимого разнесения по времени доставки всех элементов ТС. Проведённый баллистический анализ показал, что отлёт экипажа ПТК от ЛОС к Земле
Многоразовая транспортная система «Рывок» для полёта к Луне
Следующей возможностью повышения эффективности является переход к многоразовой транспортной системе «Рывок» [13]. На РОС планируется разместить целевой модуль «Платформа обслуживания», предназначенный для обеспечения деятельности экипажа в дальнем космосе, в т. ч. и по лунной программе. Одним из элементов, базирующихся на одном из стыковочных портов этой платформы, может быть многоразовый пилотируемый корабль (МПК), выполняющий перелёты для доставки экипажа с РОС на ЛОС (рис. 7).
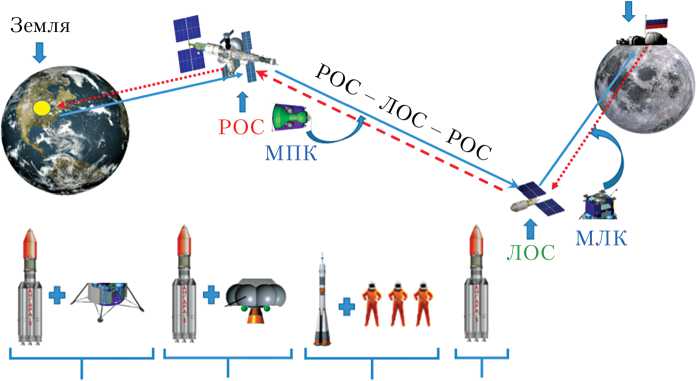
Схема полёта к Луне многоразовой транспортной системы «Рывок» представлена на рис. 8.
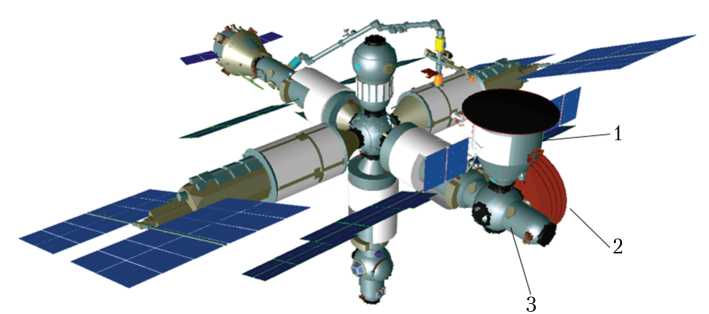
Рис. 7. Российская орбитальная станция с целевым модулем «Платформа обслуживания»: 1 — многоразовый пилотируемый корабль «Рывок»; 2 — запасные экраны; 3 — целевой модуль «Платформа обслуживания» (рисунок создан авторами)
возможен в каждые сутки без дополнительных затрат топлива, в отличие от «базовой» двухпусковой схемы, где такая возможность появляется один раз в две недели. Это обстоятельство существенно повышает безопасность экипажа при срочном возвращении c Луны. Дополнительные финансовые затраты на создание и поддержание ЛОС могут быть существенно скомпенсированы при придании ЛОС международного статуса с приглашением к участию в ней дружественных стран.
ЛБ
1-й пуск 2-й пуск 3-й пуск 4-й пуск
Рис. 8. Транспортная система «Рывок» для полёта к Луне: РОС — Российская орбитальная станция; ЛОС — лунная орбитальная станция; МПК — многоразовый пилотируемый корабль; МЛК — многоразовый лунный корабль; ЛБ — лунная база (рисунок создан авторами)
Экипаж МПК с помощью КК «Союз-МС» и РН среднего класса «Союз-2.1б» доставляется на РОС, где ожидает запуска КВТК на РН А5В. После стыковки МПК с КВТК, последний выполняет отлётный импульс к Луне. Попутной задачей КВТК является логистическая доставка топлива для дозаправки МПК. Расчёты показывают, что, исходя из располагаемой полезной нагрузки РН А5В на наклонении 96,8 ° в 34,2 т, КВТК способен выполнить отлётный импульс к Луне МПК массой 17,2 т. Согласование траектории прилёта к Луне с плоскостью орбиты ЛОС выполняется во время перелёта на орбиту ВЛО [14, 15].
После стыковки с ЛОС экипаж, используя МЛК с характеристиками, представленными в предыдущем разделе, выполняет посадку на поверхность Луны. По завершении работ экипажа на поверхности, МЛК стартует с Луны, стыкуется на низкой окололунной орбите с межорбитальным буксиром, с помощью которого возвращается на ЛОС. Дата отлёта МПК к Земле должна обеспечивать его перелёт в плоскость орбиты РОС. Проведённый анализ показал, что возможность возвращения МПК в плоскость орбиты РОС при наклонении 96,8 ° появляется со скважностью 12–13 сут, причём продолжительность окна отлёта составляет двое-трое суток.
Для возвращения МПК на околоземную орбиту используется аэроторможение, для чего перигей прилётной орбиты располагается в атмосфере Земли. Тормозной экран с абляционным покрытием, доставляемый на орбиту РОС вместе с РБ КВТК и выдерживающий температуру нагрева до 3 000 ° С, позволяет снизить скорость МПК до значения 1-й космической скорости на высоте орбиты РОС за одно прохождение атмосферы [16, 17], после чего тормозной экран отделяется. Один из концептов МПК представлен на рис. 9. Логистическая доставка тормозного экрана, наряду с топливом для дозаправки МПК, может осуществляться на КВТК в качестве попутного груза, либо запасные экраны доставляются на РОС при запуске МПК с Земли к РОС, где в последующем
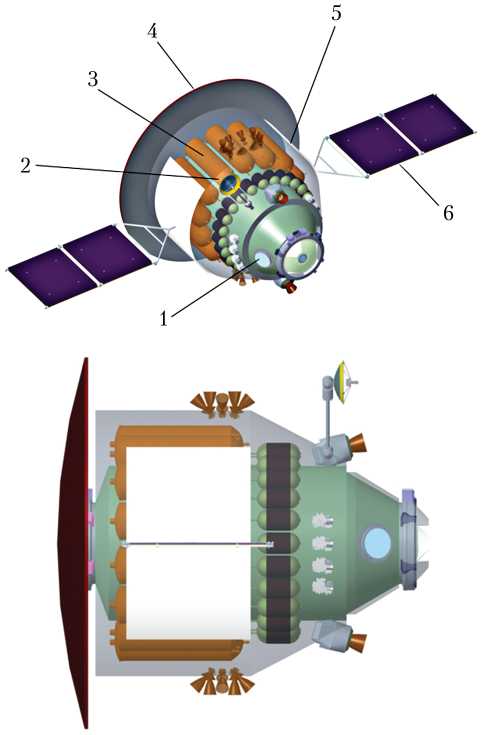
Рис. 9. Общий вид многоразового пилотируемого корабля «Рывок» с одноразовым тормозным щитом: 1 — иллюминатор; 2 — остронаправленная антенна; 3 — двигательная установка; 4 — лобовой экран; 5 — боковой экран; 6 — солнечная батарея (складывается при аэродинамическом торможении) (рисунок создан авторами)
располагаются на «Платформе обслуживания» (см. рис. 7).
Оценочные массовые характеристики МПК и КВТК на орбите РОС при попутной доставке топлива для дозаправки М дз на КВТК, и опережающей доставке тормозного щита массой М щ на РОС по технологии «буксир– контейнер», предусматривающей использование многоразового буксира, входящего в состав РОС и доставляющего на неё контейнеры, выводимые на опорную околоземную орбиту:
МПК:
конструктивная масса 10т;
масса тормозного щита 1,0т;
масса дозаправляемого топлива 6,2 т;
масса экипажа 0,32т;
КВТК:
конструктивная масса 5,5т;
масса топлива 22,5т;
Суммарная масса МПК + КВТК 45,52 т.
Конструктивная масса МПК составляет ~10 т и позволяет получить герметичный объём 21,8 м 3 , что превышает соответствующий показатель возвращаемой капсулы ПТК. За счёт отказа от средств обеспечения посадки (парашютов, двигателей мягкой посадки, взводимых кресел, двигателей системы управления спуском, балансировочного груза и т. д.) располагаемый объём герметичной части МПК позволяет обеспечить комфортное пребывание экипажа до стыковки с ЛОС.
Сравнительный анализ транспортных систем
Варианты ТС, представленные выше, отличаются различным подходом, количеством используемых РН и модулей, их многоразовостью и т. д. Для проведения количественного сравнения различных вариантов ТС используем хорошо известный показатель относительной конечной массы выводимого mк
КА на орбите ц = —— [18] (где m — m 0
масса КА на орбите, а m 0 — масса РН на старте), принятый для оценки РН. Для транспортных систем, в которых задействовано большое количество модулей и РН, на основе этого показателя введём критерий энергомассовой эффективности K эфф в виде обобщённой относительной конечной массы, выраженной в виде отношения конечной массы МЛК или ВМ m к к суммарной грузоподъёмности задействованных РН S m 0 i :
К эфф ^ k Z
m к
Z m 0 i
Выбор такого критерия, хоть и не является всеобъемлющим и учитывающим экономические характеристики, но позволяет провести сравнение различных схем полёта. Этот критерий эффективности отражает то, что величина запускаемой на орбиту массы в первом приближении определяет порядок стоимости. Рассматриваемый показатель является отражением удельной стоимости единичной транспортной операции по доставке экипажа на ЛБ. Масса взлётного модуля mк «…является по своей сути характеристикой качества транспортной системы или его техническим совершенством, оцениваемым через аналогичную характеристику базового образца…» [19]. От массы ВМ напрямую зависит герметичный объём модуля, в котором экипаж вынужден находиться во время автономного полёта с окололунной орбиты на поверхность Луны и обратно, а в случае МЛК — и на протяжении всего полёта от ОС и обратно. Кроме того, суммарная грузоподъёмность задействованных РН Sm 0 i может быть и некоторой ценовой характеристикой ТС. Грузоподъёмность РН существенно зависит от наклонения орбиты выведения. В рассмотренных вариантах фигурировали наклонения 28,5° (для миссии «Аполлон»), 51,6° и 97,0°. Чтобы привести расчёты к одному знаменателю, грузоподъёмность РН, за исключением программы «Аполлон», принималась для наклонения 51,6°.
Наряду с K эфф в табл. 1 для сравнения приведён относительный коэффициент K отн , представляющий собой отношение коэффициентов эффективности для различных вариантов ТС K эфф i к коэффициенту эффективности, соответствующему принятой на сегодня ТС по российской программе на базе двух РН СТК K : эфф осн
K
K = эфф i отн K эфф осн .
Превосходство ТС с РОС, ЛОС и ПТК «Орёл» составляет 13% по сравнению с принятой в качестве основной, двухпусковой схемой, требующей использования двух РН СТК. Размещение на околоземной станции многоразового пилотируемого корабля в качестве средства для перелётов повысит эффективность альтернативной транспортной системы уже на 42%.
Для оценки надёжности каждой из рассмотренных транспортных систем по высадке экипажа на поверхность Луны был проведён расчёт вероятности успешной экспедиции по следующей формуле:
Р общ = Р РН Р стык Р ЛО, где Р общ — вероятность успешной экспедиции на Луну; Р РН — вероятность безотказной работы РН; Р стык — вероятность успешной стыковки двух объектов; Р ЛО — вероятность успешности лунных операций, включающих посадку лунного модуля на поверхность Луны и его взлёт с поверхности.
Таблица 1
Сравнительный анализ транспортных систем по коэффициенту эффективности
|
Схема |
Кол-во стыковок |
Масса КК/ПТК/МПК заправленного, т |
Масса ЛВПК заправленного, т |
Масса ВМ/МЛК конструктивная, т |
Экипаж на Луне |
Σ m 0 i , т |
K эфф , % |
K отн |
|
1-пусковая «Аполлон» |
1 |
28,3 |
15,0 |
2,0 |
2 |
140 |
1,57 |
0,751 |
|
2-пусковая базовая |
2 |
22,0 |
27,0 |
4,8 |
4 |
230 |
2,09 |
1,000 |
|
Альтернативные схемы |
||||||||
|
4-пусковая с РОС |
4 |
18,9 |
19,0 |
3,4 |
2 |
156 |
2,18 |
1,043 |
|
4-пусковая с РОС/ЛОС |
5 |
22,4 |
21,5 |
3,7 |
4 |
156 |
2,37 |
1,134 |
|
4-пусковая «Рывок» с РОС/ЛОС |
6 |
18,8 |
21,5 |
3,7 |
3–4 |
125 |
2,96 |
1,416 |
Примечание. КК — космический корабль; ПТК — пилотируемый транспортный корабль; МПК — многоразовый пилотируемый корабль; ЛВПК — лунный взлётно-посадочный комплекс; ВМ — взлётный модуль; МЛК — многоразовый лунный корабль; РОС — Российская орбитальная станция; ЛОС — лунная орбитальная станция; Σ m 0 i — суммарная грузоподъёмность задействованных ракет-носителей; K эфф — коэффициент эффективности; K отн — относительный коэффициент.
Для расчёта вероятности принимается:
-
• вероятность успешного пуска РН СТК Р РН СТК = 0,97;
-
• вероятность успешного пуска РН «Ангара-А5В» Р РН А5В = 0,985;
-
• вероятность успешного пуска РН «Союз-2» Р РН Союз = 0,993;
-
• вероятность успешной стыковки беспилотного объекта в автоматическом режиме с МКС по результатам статистики полётов грузового корабля «Прогресс» на сегодня составляет Р стык б/п = 0,8837 (такое сравнительно низкое значение сформировалось вследствие частых сбоев радиотехнической системы «Курс» на ближнем участке сближения в 200-метровой окрестности МКС, обусловленных, в свою очередь, «затенениями» и переотражениями от выступающих конструкций станции с большими пространственными размерами. Ожидается, что при стыковках по программе лунных миссий этот фактор будет менее значительным ввиду сравнительно небольших размеров стыкуемых объектов, а дополнительное дублирование системы «Курс» на ближнем участке сближения средствами
лазерного излучения, например видеометром совместно с телегониометром, использованными при стыковке Automated Transfer Vehicle ( ATV ) с МКС [20], должно позволить поднять значение вероятности успешной стыковки беспилотных объектов в автоматическом режиме до Р стык б/п = 0,95);
-
• вероятность успешной стыковки пилотируемого объекта Р стык п = 0,9995;
-
• вероятность успешности лунных операций Р ЛО является одинаковой для всех рассмотренных схем и условно принимается равной 1,0, что позволяет получить сравнительную надёжность транспортных систем.
В табл. 2 приведены значения сравнительной вероятности успешной экспедиции на Луну для каждой из рассмотренных в работе ТС, исходя из следующих формул:
Р = Р 2 Р 2 ;
общ1 РН СТК стык п
Р = Р 4 Р Р 4 ;
общ2 РН А5В стык б/п стык п
-
Р общ3 = Р 4 РН А5В Р 2 стык б/п Р 5 стык п;
-
Р общ4 = Р 3 РН А5В Р РН Союз Р 2 стык б/п Р 6 стык п.
Таблица 2
Сравнительная надёжность транспортных систем
|
Схема |
Пуски |
Стыковки |
Р общ |
|
2-пусковая базовая |
2 РН СТК |
ПТК+ЛВПК ВМ+ПТК |
0,9399 |
|
4-пусковая с РОС |
4 РН А5В |
ЛВПК+КВТК ПТК+РОС ПТК+КВТК ПТК+ЛВПК ВМ+ПТК |
0,8924 |
|
4-пусковая с РОС/ЛОС |
4 РН А5В |
ПС+ЛОС РБ+ЛОС ПТК+РОС ПТК+КВТК ПТК+ЛОС ВМ+РБ ВМ+ЛОС |
0,8474 |
|
4-пусковая «Рывок» с РОС/ЛОС |
3 РН А5В 1 РН Союз |
ПС+ЛОС РБ+ЛОС Союз+РОС МПК+КВТК МПК+ЛОС ВМ+РБ ВМ+ЛОС МПК+РОС |
0,8538 |
Примечание. ■ — беспилотный объект; ■ — пилотируемый объект; ПТК — пилотируемый транспортный корабль; ЛВПК — лунный взлётно-посадочный комплекс; ВМ — взлётный модуль; КВТК — кисло-родно-водородный разгонный блок тяжёлого класса; РОС — Российская орбитальная станция; ПС — посадочная ступень; ЛОС — лунная орбитальная станция; РБ — разгонный блок; МПК — многоразовый пилотируемый корабль.
Заключение
-
1. Использование РОС и ЛОС с функциями «базового лагеря» и местом размещения многоразового лунного корабля для посадки на Луну достаточно для эффективного транспортного обеспечения ЛБ с помощью РН тяжёлого класса «Ангара-А5В».
-
2. Наиболее благоприятным расположением ЛОС с точки зрения минимизации затрат на доставку элементов ТС и надёжности функционирования
-
3. Транспортная система с ЛОС и ПТК «Орёл» повышает эффективность транспортного обеспечения ЛБ на 13%, по сравнению с 2-пусковой схемой на базе РН СТК, и позволяет выполнять отлёт ПТК «Орёл» к Земле в каждые сутки без дополнительных затрат топлива, что существенно повышает безопасность экипажа при срочном возвращении с Луны.
-
4. Использование в ТС с ЛОС многоразового пилотируемого корабля «Рывок», размещённого на РОС, повышает эффективность транспортного обеспечения ЛБ на 42%, по сравнению с базовой схемой.
-
5. Несмотря на увеличение общего числа стыковок, надёжность ТС с ЛОС находится на приемлемом уровне, а при увеличении надёжности автоматической стыковки беспилотного объекта будет стремиться к значению вероятности успешной миссии по 2-пусковой схеме на базе РН СТК.
является высокая полярная орбита с высотой ~10 тыс. км.
Список литературы Эффективная транспортная система для доставки экипажа на лунную базу
- Whitley R, Martinez R. Options for staging orbits in cis-Lunar space. Aerospace Conference IEEE, Big Sky, MT, USA. 2016. 9 p. Available from: https://ntrs.nasa.gov/api/citations/20150019648/downloads/20150019648.pdf (accessed 12.09.2023).
- Rossiya i Kitai podpisali soglashenie o rabotakh po izucheniyu Luny [Russia and China signed an agreement on the Moon exploration activities]: news publication dated 21.12.2022. RIA Novosti: website. Available from: https://ria.ru/20221221/luna-1840178767.html (accessed 12.09.2023) (in Russian).
- Khanke Kh. Lyudi, korabli, okeany: 6000-letnyaya avantyura moreplavaniya [People, ships, oceans: a 6000-year adventure of marine navigation]. Leningrad: Sudostroenie [Shipbuilding]; 1976 (in Russian).
- Lunar Habitation: project. Foster + Partners: web site. URL: https://www.fosterandpartners.com/ projects/lunar-habitation (accessed 12.09.2023).
- Baturin YuM, editor. Mirovaya pilotiruemaya kosmonavtika: Istoriya. Tekhnika. Lyudi [World manned cosmonautics: History. Technology. People]. Moscow: RTSoft; 2005 (in Russian).
- Rossiya sozdaet osobennuyu raketu-nositel’ dlya poleta na Lunu: chto izvestno o novom proekte Roskosmosa [Russia is developing a special launch vehicle for lunar mission: what is known about the new Roscosmos project]: publication dated 12.04.2023. At: Komsomolskaya Pravda: website. Available from: https://www.kp.ru/daily/27489/4747409 (accessed 12.09.2023) (in Russian).
- Katorgin BI, Lopota VA, Levochkin PS, Chvanov VK, Samitov RM, Sokolov BA, Filippov IM, Ulybyshev YuP, Murtazin RF, Tupitsyn NN, Kryukov IA, Kiselev AV, Firstaev DS. Possible engineering design solutions for development of heavy and super-heavy oxygen-kerosene space rocket. Space Engineering and Technology. 2022; 1(36): 5–20. Available from: https://elibrary.ru/pnpshu (accessed 12.09.2023) (in Russian).
- Murtazin RF, Belyaeva EK. Countering postponements of launches in a four-launch lunar landing mission scenario. Space Engineering and Technology. 2022; 4(39): 94–100. Available from: https://elibrary.ru/ovnyss (accessed 12.09.2023) (in Russian).
- NTS Roskosmosa i Byuro Soveta RAN rekomendovali predstavit’ v Kabmin predlozheniya o sozdanii ROSS [Roscosmos STC and RAS Council Bureau called for submitting proposals on ROSS development to the Cabinet of Ministers]: news publication dated 21.09.2021. At: Roscosmos: website. Available from: https://www.roscosmos.ru/32672 (accessed 12.09.2023) (in Russian).
- Tselousova A, Trofimov S, Shirobokov M. Station-keeping in high near-circular polar orbits around the Moon. Acta Astronautica. 2021; 188(3): 85–192. Available from: https://doi.org/10.1016/j.actaastro.2021.07.025 (accessed 12.09.2023).
- Murtazin RF. Effective spacecraft insertion into high-altitude circular lunar orbit. Kosmonavtika i raketostroenie [Cosmonautics and Rocket Engineering]. 2019; 3(108): 5–12. Available from: https://elibrary.ru/tnzunk (accessed 12.09.2023) (in Russian).
- Murtazin RF, inventor. RSC Energia. Sposob upravleniya dvizheniem kosmicheskogo ob″ekta pri perelete s orbity Zemli na orbitu Luny [A method of controlling a space object movement when flying from the Earth’s to the Moon’s orbit]. Patent RU 2709951 C1. IPC: B64G 1/10, B64G 1/26. Application No. 2018144592 dated 14.12.2018. Published 23.12.2019. Bulletin No.36 (in Russian).
- Murtazin RF. Space transport system of new generation to ensure lunar missions. Kosmonavtika i raketostroenie [Cosmonautics and Rocket Engineering]. 2017; 2(95): 55–63. Available from: https://elibrary.ru/yndbej (accessed 12.09.2023) (in Russian).
- Murtazin RF. Scheme of rendezvous mission to lunar orbital station by spacecraft launched from Earth. Cosmic Research. 2016; 54(3): 253–259. Available from: https://elibrary.ru/vvgehz (accessed 12.09.2023).
- Murtazin RF, inventor. RSC Energia. Sposob upravleniya dvizheniem aktivnogo kosmicheskogo ob″ekta, stykuemogo s passivnym kosmicheskim ob″ektom [Method for motion control of an active space object docked to a passive space object]. Patent RU 2562908 2. Application No. 2014103395/11 dated 31.01.2014. Published 10.09.2015. Bulletin No. 25 (in Russian).
- heng Z, Wang Zh, Zhang Yu. Analysis and optimization of Lunar exploration architecture based on reusable human spacecraft. Journal of Spacecraft and Rockets. 2019; 56(3): 910–918. Available from: https://doi.org/10.2514/1.A34265 (accessed 12.09.2023).
- Murtazin RF, inventor. RSC Energia. Sposob upravleniya transportnoi kosmicheskoi sistemoi [Method of controlling a transport space system]. Patent RU 2605463 C2. IPC: B64G 1/10, B64G 1/26. Application No.2015112124/11 dated 03.04.2015. Published 20.12.2016. Bulletin No. 35 (in Russian).
- Appazov RF, Sytin OG. Metody proektirovaniya traektorii nositelei i sputnikov Zemli [Methods for designing trajectories of launch vehicles and Earth satellites]. Moscow: Nauka; 1987 (in Russian).
- Arkhangel’skii II, Afanasiev PP, Bolotov EG, Golubev IS, Matveenko AM, Mizrokhi VYa, Novikov VN, Ostapenko SN, Svetlov VG. Proektirovanie zenitnykh upravlyaemykh raket [Design of antiaircraft guided missiles]. oscow: MAI; 2001 (i Russian).
- State of the art in automatic rendezvous: publication at 02.04.2024. ESA: web site. Available from: https://www.esa.int/Science_Exploration/Human_and_Robotic_Exploration/ATV/State_of_the_art_in_automatic_rendezvous (accessed 12.09.2023).
