Эффективность обнаружения малозаметных объектов мультисенсорными системами разведки

Автор: Козирацкий А.А., Мамаджанян Е.А., Шмаров А.Н.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 1 т.11, 2018 года.
Бесплатный доступ
На основе теории свидетельств Демпстера-Шефера разработана методика и выполнен анализ эффективности обнаружения объектов со сниженной заметностью мультисенсорными системами разведки. Установлены зависимости вероятности правильного обнаружения объектов от числа сенсоров в системе разведки, их эффективности и отношения сигнал/шум на выходе оптимального обнаружителя каждого сенсора.
Вероятность правильного обнаружения, мультисенсорная система разведки, отношение сигнал/шум, теория свидетельств демпстера-шефера
Короткий адрес: https://sciup.org/146115280
IDR: 146115280 | УДК: 623.746.773 | DOI: 10.17516/1999-494X-0005
Effectiveness of detection of low visibility objects via multi-sensor intelligence systems
Based on Dempster-Shafer evidence theory, a method was developed and analysis of effectiveness was implemented of low visibility objects detection with multi-sensor intelligence systems. Dependence of successful object detection probability from number of sensors in intelligence system was found. Their effectiveness and signal-to-noise ratio on output of optimal detector of each sensor.
Текст научной статьи Эффективность обнаружения малозаметных объектов мультисенсорными системами разведки
Современные тенденции в развитии систем разведки состоят в комплексировании информации, получаемой разнородными средствами, работающими в различных спектральных диапазонах и на различных физических принципах [1]. Такие информационные системы называются мультисенсорными. Особое значение они приобретают в условиях информационного конфликта, когда системам разведки одной стороны противостоят системы разведки противоборствующей стороны и каждая из сторон имеет средства, препятствующие получению информации другой стороной. В этих условиях за счет комплексирования различных средств разведки сохраняется возможность получения необходимой информации в том случае, когда часть средств подавлена противоположной стороной, чем достигается выигрыш в конфликте [2]. В настоящее время в качестве одного из способов обеспечения выигрыша в конфликте рассматривается снижение заметности объектов [2], осуществляемое путем скрытия их демаскирующих признаков [3]. При создании малозаметных объектов, а также разработке систем их разведки целесообразно опираться на показатели, характеризующие эффективность разведки в зависимости от показателей эффективности входящих в них средств и параметров фоноцелевой обстановки.
Целью настоящей статьи является получение и анализ расчетных соотношений, устанавливающих связь показателей эффективности мультисенсорных систем разведки с показателями эффективности входящих в них сенсоров и параметрами фоноцелевой обстановки.
В современных системах разведки используются мультисенсорные системы с централизованной и децентрализованной архитектурой [4]. Оба типа систем состоят из нескольких каналов. Централизованная архитектура предполагает, что только единственный процессор обрабатывает все данные. В системе с децентрализованным построением каждый канал локально обрабатывает данные сенсора, проверяет их и проводит оценку состояния. Затем происходит обмен информацией между каналами (в виде оценок состояния или вероятностных характеристик) для ее уточнения на следующем этапе. В условиях жесткого дефицита времени, а также при неуверенном обнаружении объектов (обнаружении малозаметных объектов) предпочтение отдается системам разведки с централизованной архитектурой. Для обработки и принятия решения в них используются алгоритмы, основанные на теории свидетельств Демпстера-Шефера [5] (ТСДШ). По сравнению с методом Байеса [6], в котором рассматриваются априорные вероятности, в ТСДШ используется неклассическая идея «основной массы вероятности» как альтернатива традиционной вероятности [4, 5]. Основная масса вероятности отражает начальное знание о системе, включая ее неопределенные состояния. Значение основной массы вероятности, обозначаемое m, является основной мерой, характеризующей доверие гипотезы.
Пусть X – универсальное множество, рассматриваемых утверждений; P(X) – совокупность всех подмножеств множества X, включая пустое множество. Масса m(x) элемента x множества P(X) выражает соотношение всех уместных и доступных свидетельств, которые поддержива-– 38 – ют утверждение, что определенный элемент x принадлежит P(X). Величина m(x) относится только к множеству P(X) и не создает никаких дополнительных утверждений о других подмножествах X, каждое из которых имеет свою массу.
m ( ∅ ) = 0 .
N
∑ m (xi) = 1 .
i = 1
xi ∈ P(X)
Здесь ∅ – пустое множество, i – номер элемента множества P(X), i = 1…N.
Оцениваемыми состояниями для сенсоров многоканальной системы разведки являются: обнаружение объекта, обнаружение фона (т.е. отсутствие объекта) и неопределенное состояние, при котором информация, полученная сенсором, не позволяет отличить объект от фона. Меры доверия для каждого из оцениваемых состояний (с помощью М сенсоров различных спектральных диапазонов, входящих в состав многоканальной системы разведки) определяется в соответствии с правилом Демпстера [4, 5]:
∑ ∏ mj(xi)
m1,2...M (y) = x 1 ∩ x 2 ... ∩ x M ≠ ∅ 1 ≤ j ≤ N ; k = ∑ mj(x), (2)
1-k x1∩x2...∩xM= ∅ 1≤ j ≤ N i где y – пересечение состояний xi.
С помощью приведенного правила Демпстера (2) были исследованы характеристики обнаружения мультисенсорной системы разведки. В качестве оцениваемого показателя рассматривалась вероятность правильного обнаружения объекта в зависимости от количества сенсоров, входящих в систему разведки, и вероятностных характеристик обнаружения отдельного сенсора. Полученные результаты приведены на рис. 1.
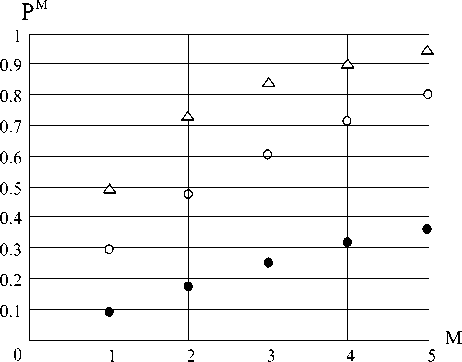
○ – Р1 = 0,1; • – Р1 = 0,3; ∆ – Р1 = 05
Рис. 1. Зависимость вероятности обнаружения объекта (РМ) от количества сенсоров (М) в системе разведки 1,2,3 – Р = 0,1; 0,3; 05
Fig. 1. Dependence of object detection probability (РМ) on the number of sensors (М) in the surveillance system 1,2,3 – Р1 = 0,1; 0,3; 05
Расчеты подтвердили очевидный результат, заключающийся в том, что для мультисенсор-ной системы вероятность правильного обнаружения объекта разведки растет с увеличением количества сенсоров, причем тем значительнее, чем выше вероятность обнаружения отдельного сенсора. Несмотря на очевидность данного вывода, полученные результаты позволяют определить требования к составу системы разведки и вероятностным характеристикам обнаружения входящих в нее средств. Для обеспечения вероятности правильного обнаружения объекта мультисенсорной системой разведки не менее 0,5 количество сенсоров должно быть не менее 3, а вероятность правильного обнаружения объекта отдельным сенсором должна быть не хуже 0,3. Дальнейшее увеличение эффективности системы разведки возможно либо за счет увеличения числа сенсоров, либо за счет улучшения их характеристик обнаружения. Так, достижение вероятности правильного обнаружения объекта не менее 0,9 требует использования в системе разведки четырех сенсоров с вероятностью правильного обнаружения не менее 0,5. При невозможности обеспечения вероятности обнаружения отдельного сенсора ≥0,5 вероятность обнаружения объекта многоканальной системой разведки ≥0,9 может быть обеспечена пятиканальной системой при условии вероятности обнаружения объекта отдельным сенсором не хуже чем 0,3.
На рис. 2 представлены результаты исследований влияния параметров фоно-целевой обстановки (ФЦО) на характеристики обнаружения объекта мультисенсорной системой разведки. ФЦО в поле зрения отдельного сенсора задавалась с помощью параметра обнаружения q, равного отношению сигнал/шум по напряжению на выходе оптимального приемника локационного сигнала, имеющего случайные амплитуду и начальную фазу [7]. Исследования прово-
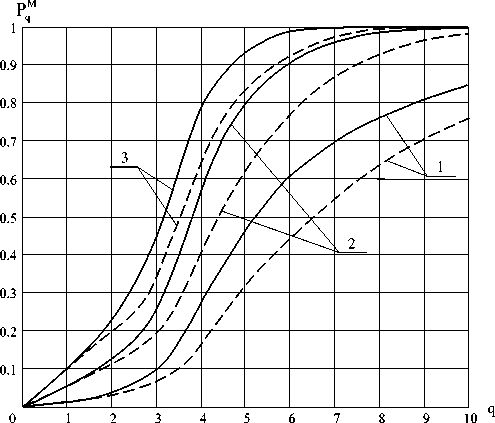
непрерывная линия – для F лт =10-4; штриховая линия – для F лт =10-6
Рис. 2. Зависимость вероятности обнаружения объекта (Pq) от величины параметра обнаружения (q) для различных значений вероятности ложной тревоги (Fлт) 1,2,3 – М=1,3,5
Fig. 2. Dependence of object detection probability (Pq) on the value of the detection parameter (q) for various values of false alarm probability (Ffa) 1,2,3 – М=1,3,5
дились по следующей методике. На выходе оптимального приемника в диапазоне 0÷10 задавалась величина q, для которой с использованием [7] рассчитывалась вероятность правильного обнаружения сигнала отдельным сенсором PqM=1при вероятности ложной тревоги Fлт = 10-4 и F = 10-6. Затем по значениям PM=1с использованием правила Демпстера (2) рассчитывались лт q M значения вероятности обнаружения объекта мультисенсорной системой Pq = m1,2,…M (y). Полу-q ченные результаты приведены на рис. 2. Как и следовало ожидать, они повторяют результаты,
M отображенные на рис. 1. Вероятность P тем больше, чем больше значения q и M. Вместе с тем, q они позволяют определить требования к защищенности объекта от обнаружения мультисен-сорной системой разведки. Для обеспечения вероятности правильного обнаружения объекта системой разведки, включающей 1, 3 и 5 сенсоров, не более 0,2 отношение сигнал/шум на выходе оптимального приемника в каждом из каналов не должно превышать значений 3,6; 2,7 и 1,8 для Fлт = 10-4 и 4,2; 3,1 и 2 для Fлт = 10-6.
Заключение
Таким образом, в настоящей работе разработан научно-методический аппарат, устанавливающий связь показателей эффективности мультисенсорных систем разведки с показателями эффективности входящих в них сенсоров и параметрами фоноцелевой обстановки. Он позволяет определять требования к составу систем разведки, вероятностным характеристикам обнаружения входящих в них средств, а также требования к защищенности объектов от обнаружения мультисенсорными системами разведки.
Список литературы Эффективность обнаружения малозаметных объектов мультисенсорными системами разведки
- Меньшаков Ю.К. Теоретические основы технических разведок: учеб. пособие. Под ред. Ю.Н. Лаврухина. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 536 с
- Модели информационного конфликта средств поиска и обнаружения. Под ред. Ю.Л. Козирацкого. М.: Радиотехника. 2013. 232 с
- Понькин В.А. Оптическая заметность летательных аппаратов. Под ред. В.А. Понькина и Э.В. Петещенкова. Воронеж. «Научная книга». 2015. 553 с
- Андрющенко М.С., Степанов В.В. Обработка информации в мультисенсорных системах. Вооружение и экономика. 2015, 4, 39-45
- Ганцева Е.А., Каладзе В.А. Статистический подход разрешения неопределенности экспертных суждений на основе теории случайных множеств. Вестник ВГУ. Серия: системный анализ и информационные технологии. 2015, 2, 83-88
- Теория обнаружения сигналов. Под. ред. П.А. Бакута. М., Сов. радио, 1984
- Ширман Я.Д., Голиков В.И. Основы теории обнаружения радиолокационных сигналов и измерения их параметров. М.: Сов. радио. 1963. 278 с
