Экономичное цифровое управление в аварийном режиме стабилизации спутника на солнечно-синхронной орбите

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович, Сомова Татьяна Евгеньевна
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 6-1 т.20, 2018 года.
Бесплатный доступ
Представляются алгоритмы экономичного цифрового управления в длительном аварийном режиме стабилизации информационного спутника на солнечно-синхронной орбите, приводятся результаты компьютерной имитации этого режима для спутника землеобзора.
Космический аппарат, солнечно-синхронная орбита, ориентационный контроль, аварийный режим
Короткий адрес: https://sciup.org/148312541
IDR: 148312541 | УДК: 629.78
Economical digital control in emergency mode stabilization of the satellite in sun-synchronous orbit
Algorithms of economical digital control in the long-term emergency mode for stabilization of the information satellite in the sun-synchronous orbit and the results of computer simulation of this mode for the earth observation satellite are presented.
Текст научной статьи Экономичное цифровое управление в аварийном режиме стабилизации спутника на солнечно-синхронной орбите
1. ПОСТАНОВКА ЗАДАЧИ
В [1, 2] исследован аварийный режим (АР) системы управления движением (СУД) информационного спутника на солнечно-синхронной орбите (ССО) с наведением орта к плоскости неподвижных панелей солнечных батарей (СБ) в направлении Солнца при назначении требуемого углового положения космического аппарата (КА) относительно этого направления с использованием информации о положении орта, ортогонального плоскости эклиптики. При этом устанавливаются устойчивые нелинейные угловые колебания корпуса КА из-за «конфликтующих» воздействий возмущающего гравитационного момента и управляющего момента магнитного привода (МП) на каждом витке ССО. Такой энергосберегающий аварийный режим вполне приемлем при его длительности до нескольких недель. При необходимости продолжительной (десятки месяцев) консервации КА с сохранением возможности восстановления работоспособности его СУД предлагается другой, более экономичный АР, где применяется пассивная гравитационная стабилизация спутника при ситуационном включении магнитного привода.
На рис. 1 представлены связанная с корпусом КА система координат (ССК) В (О xyz ) с ортами b i и связанная с панелями СБ система координат P , оси которой x p , y p и z p в парковом положении панелей СБ (при γ p = 0 ) параллельны соответствующим осям ССК. Орбитальная система координат (ОСК) O (O x o y o z o) с ортами o i вращается в инерциальном базисе I ф с вектором угловой скорости Ш о . Вводятся орт e направления на Землю и орт s направления на Солнце. В отличие от [1, 2], здесь перед выполнением АР панели СБ разворачиваются на угол γ p = -π /2 , а корпус КА (ССК) устанавливается в ОСК с его разворотом на угол ψ = -π /2 относительно оси O y с ортом b 2 и наименьшим моментом инерции КА. В результате ось O x с ортом b 1 и ось Op y p с ортом n p совпадают по направлению с осью O z o ОСК и обеспечивается
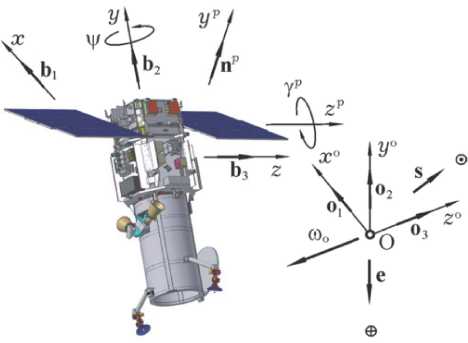
Рис. 1. Схема перехода КА в режим гравитационной стабилизации максимальный момент инерции КА по оси Ox ССК, противоположной по направлению вектору угловой скорости Юо, рис. 1.
При поступлении команды на длительную консервацию спутника выполняются следующие этапы: (i) КА переводится в орбитальную ориентацию при цифровом управлении МП; (ii) при достижении требуемой точности стабилизации КА в ОСК контур управления магнитным приводом временно выключается и спутник переходит в режим пассивной гравитационной стабилизации; (iii) для компенсации накопленных вековых возмущающих моментов, в том числе из-за влияния сил солнечного излучения, выполняется ситуационное кратковременное включение МП, что обеспечивает возвращение КА в орбитальную ориентацию с требуемой точностью. Задача состоит в (i) анализе годового перемещения орта s направления на Солнце в ОСК, (ii) разработке законов цифрового управления МП для перевода КА в орбитальную ориентацию с его последующей пассивной гравитационной стабилизацией и (iii) выполнении нелинейного анализа длительного пространственного движения КА на ССО с учетом ситуационного включения магнитного привода.
2. МАТЕМАТИЧЕСКИЕ МОДЕЛИ
При стандартных обозначениях и отсутствии активных управляющих сил модель движения центра масс КА в инерциальном базисе имеет общеизвестный вид r = v; v = -^ r / r + ae + am + as , где ae = an + aa , am и as - векторы ускорения, обусловленные влиянием формы Земли и неравномерности распределения её массы, гравитации Луны и Солнца, соответственно. Для моделирования вектора ускорения ae используется разложение гравитационного потенциала Земли в ряд по сферическим функциям до степени n = 8 включительно с применением полиномов Лежандра и коэффициентов зональных гармоник.
В сферической системе координат (вектор r , долгота X и широта ф ) вектор ускорения а еа зависит от r и ф , а вектор ускорения а еа зависит также и от долготы X . Вектор ускорения a s = ^ s( A r /( A r )3 - r s / r S3 ) из-за влияния Солнца определяется его гравитационным параметром ц s и расстоянием от КА до центра Солнца A r = r s - r , где расстояние r s от центра Земли до центра Солнца вычисляется по явным аналитическим соотношениям в функции текущей эпохи. Гравитационное влияние Луны вычисляется аналогично.
Ориентация базиса B в инерциальном базисе I ffi определяется кватернионом
Л = ( X0, X ) , где X = { X i } , вектором параметров Эйлера Л = { X0 , X } , который при обозначениях C а = cos а , S а = sin а представляется в форме Л = { C ф /2 , e e S ф /2 } с ортом e e оси Эйлера и углом Ф собственного поворота, и вектором модифицированных параметров Родрига (МПР) o = {oj = е е tg( Ф /4) , который связан с кватернионом Л явными соотношениями [1]. Модель углового движения КА в базисе I е представляется уравнениями
Л = Л о ю/ 2;
(1) J ( у )< Ъ = -юх К + М р + М m + М g.
Здесь K = J ( Y ) to - вектор кинетического момента (КМ) КА; to = { to i -} - вектор абсолютной угловой скорости КА, представленный в ССК O xyz ; J ( y ) = J o + 2 J p ( y ) — тензор инерции КА при произвольном положении панелей СБ, где тензор инерции J p ( y ) каждой панели зависит от угла Y = Y p ; столбец M p представляет вектор момента инерционно-гироскопических сил из-за подвижности панелей СБ [1]; M m = { mi m} - вектор управляющего механического момента магнитного привода, и наконец, вектор гравитационного момента M g = { m g } = (3M r 3 ) o 2 X J ( Y ) o 2 .
Кватернион Л ориентации базиса O относительно базиса I е определяется уравнением Л 0 = Л 0 ° to o / 2 , а погрешность ориентации базиса B в орбитальном базисе O - кватернионом E = Л 0 ° Л = ( e 0 , e ) , вектором параметров Эйлера E = { C ф e /2 , e e S ф e /2 } , матрицей C e = I з - 2[ e x ] Q e , где Q e = I 3 e 0 + [ e x ] , и вектором МПР CT e = { ст e } = e e g ( Ф e / 4) . При этом вектор S to погрешности угловой скорости определяется как S to = to - C e to o( t ) . При значении угла Ф e < п/2 вектор е = 4 ст e имеет представление е * 2 e e C ф e /2 S ф e /2 * 5 ф с вектором угловой погрешности 5 ф = { ф i } = e e Ф e . Пространственный угол ф y между ортами b 2 и о 2 определяется соотношением ф y = arccos ( b 2, о 2 ) .
Измерение кинематических параметров углового движения КА выполняется бортовой навигационной системой [1] по сигналам спутников ГЛОНАСС/ GPS и датчиками угловой скорости в моменты времени tl + 1 = tl + Tp , l е N 0 = [0,1,2,3...) с периодом Tp , а для измерения вектора индукции B = B b магнитного поля Земли с модулем B и ортом b в эти же моменты времени применяется магнитометр.
3. ИЗМЕНЕНИЕ НАПРАВЛЕНИЯ НА СОЛНЦЕ В ОРБИТАЛЬНОЙ СИСТЕМЕ КООРДИНАТ
Численными методами исследовано пространственное движение центра масс спутника на ССО высотой 720 км, наклонением 98.2695 град и начальной долготой восходящего узла 51 град. Такая орбита прецессирует по долготе восходящего узла со скоростью 0.9889 град/сут, изменение её наклонения носит колебательный характер при наличии малой вековой составляющей.
Орт s направления на Солнце перемещается в ОСК по образующей поверхности конуса, ось которого направлена по оси O z o ОСК, а угол полураствора p S практически не изменяется в течение каждого витка орбиты, рис. 2.
Годовое изменение угла р ^ полураствора конуса представлено на рис. 3. Средние значения этого угла таковы: р * = 60 град в феврале-сентябре и р * = 65 град в октябре-январе. При указанной выше орбитальной ориентации КА ось Op y p панелей СБ совпадает по направлению с осью O z o ОСК, поэтому здесь гарантируется среднегодовое значение основного фактора энергетического обеспечения спутника Qs = cos р * = 0.4695 .
4. УПРАВЛЕНИЕ МАГНИТНЫМ ПРИВОДОМ
При формировании команды M r для вектора потребного управляющего момента МП на каждом полуинтервале времени t е [ t r., tr + 1 ) , r е N 0 с заданным периодом T "'1 >> T p выполняется дискретная фильтрация указанных выше измерений. В результате в моменты времени tr = r TU m получаются отфильтрованные значения рассогласований £ r по углу и 8 to r по угловой скорости, а также отфильтрованные измерения магнитометра в r = B r b r .
Для векторов x = { xi } , y = { y, } и скалярного параметра a m > 0 введем функцию
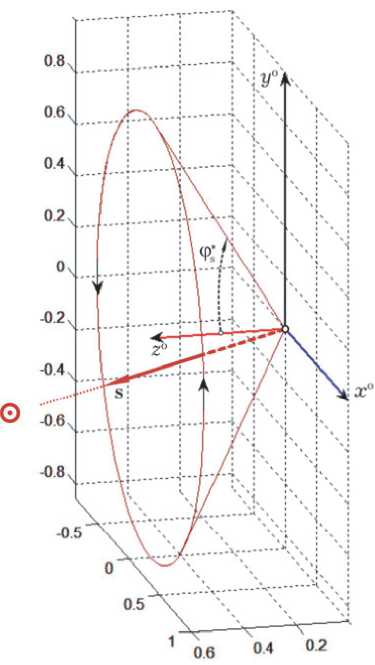
Рис. 2. Конус положений орта s у = SC(x,am) с алгоритмическим определением q = maxi | xi |; if q > am then yi = amxi I q. Эта функция ограничивает все компонеты век-m тора x по модулю параметром a , но сохраняет пропорциональность между ними.
При произвольной ориентации ССК относительно ОСК вектор дискретной команды M r формируется по соотношению
M r = - J ( y ) SC (k ф E r + к и 8 to r ,am) , (2) где k ф ,k ю являются постоянными коэффициентами и параметр am = 4к ф tg( л/8 ) = к ф П/2 . Когда вектор погрешности 8ф= { 8ф i } = е ® Ф е становится малым (угол Ф e < 3 град), вектор
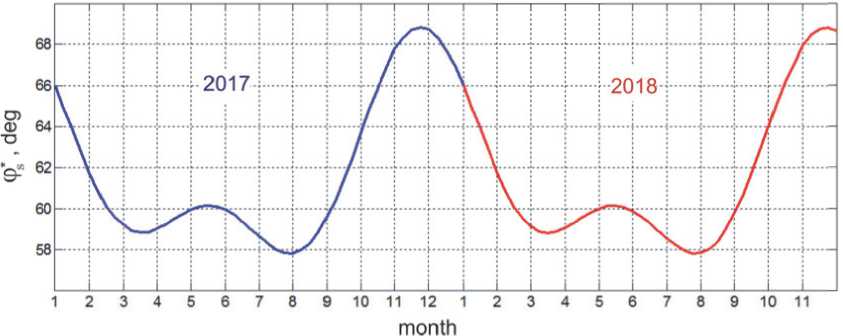
Рис. 3. Зависимость угла полураствора конуса от времени года
дискретной команды Mr вычисляется в виде gr+1 = Ьф gr + Сф е r;
М r = - J ( y ) SC (k ф g r + Р ф £ r ,am), где Ь ф ,c ф ,Р ф и k ф являются постоянными параметрами.
При цифровом управлении электромагнитным моментом (ЭММ) Lr = {lir} магнитного привода сначала определяется вектор потребной вариации импульса AIm = TmMr команды механического момента. Этот импульс пред-m mb m ставляется в виде Alr = Alr + br(Alr ,br), где Almb = br X (Alm xbr) назначается с условием (AImm,br) = 0. Далее вектор Almb = AImbim mb m с модулем AIr и ортом ir используется при формировании цифрового управления ЭММ Lr = {lir} на периоде T™ : определяется взаимная ориентация ортов br и irm в ССК, если | (br, imm) | > cs = 1/^2, то на текущем периоде дискретности МП не включается, иначе вычисляется вектор ЭММ
L r = SC (( A I m b/ T ; m)( b r x i m )/ В r ,lm ) (4) с компонентами | lir | < lm , который фиксируется на полуинтервале времени t е [ t r , tr + 1 ) . Вектор механического момента МП M m в (1) формируется V t е [ t r , tr + 1 ) по соотношению
М m( t ) = { m ™ (t )} = - L r x B ( t ) . (5)
5. АНАЛИЗ УГЛОВОГО ДВИЖЕНИЯ КА
Исследовано угловое движение КА на указанной ССО высотой 720 км, когда спутник имеет массу 6500 кг и диагональные элементы его тензора инерции равны 11450, 7150 и 9450 кг м2, период измерения Tp = 1 с, в соотношениях (2) - (5) период управления МП Tu m = 16 с и параметр ограничения компонентов вектора ЭММ магнитного привода lm = 300 А м2. Компьютерная имитация выполнена при нелинейном анализе перехода КА из ориентации в подвижной солнечно-эклиптической системы координат, которая формируется на борту КА по фактическим данным о направлении на Солнце и положении оси, ортогональной плоскости эклиптики [1,2], в режим орбитальной ориентации при начальном значении угла Ф e = 11 град и соответствующем малом значении вектора начальной угловой скорости в инерциальном базисе I е . На рис. 4 - 6 приведены кинематические параметры динамического процесса при таком переходе КА в орбитальную ориентацию в течение П = 4 витков его орбитального полёта.
На рис. 7 и 8 представлены изменения компонентов вектора угловой погрешности 5ф = { 5ф i } и угла ф y между ортами b 2 и о 2 , начиная с пятого витка по 145 виток полёта спут-
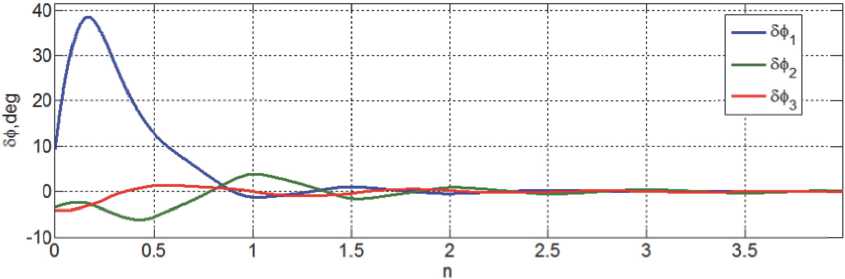
Рис. 4. Угловые погрешности при переходе КА в орбитальную ориентацию
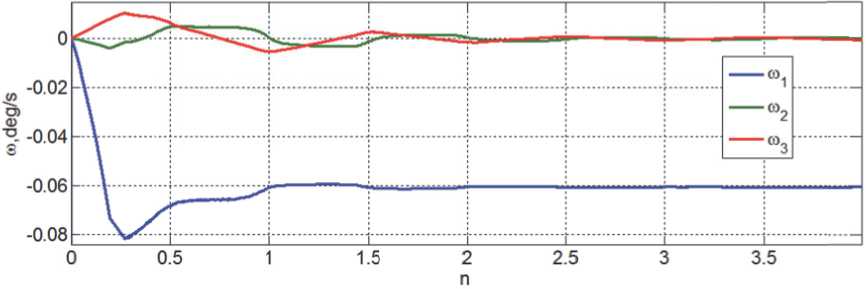
Рис. 5. Угловые скорости КА при переходе в орбитальную ориентацию
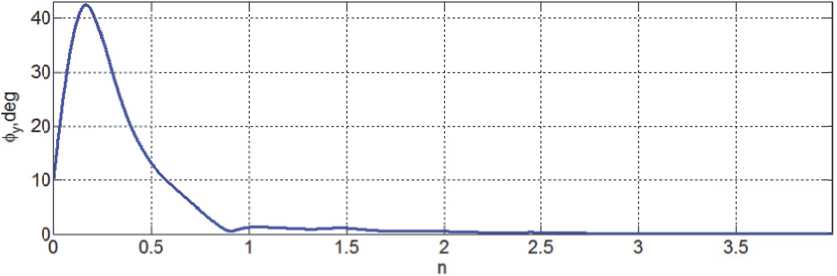
Рис. 6. Пространственный угол ориентации орта b 2 относительно орта o 2 местной вертикали
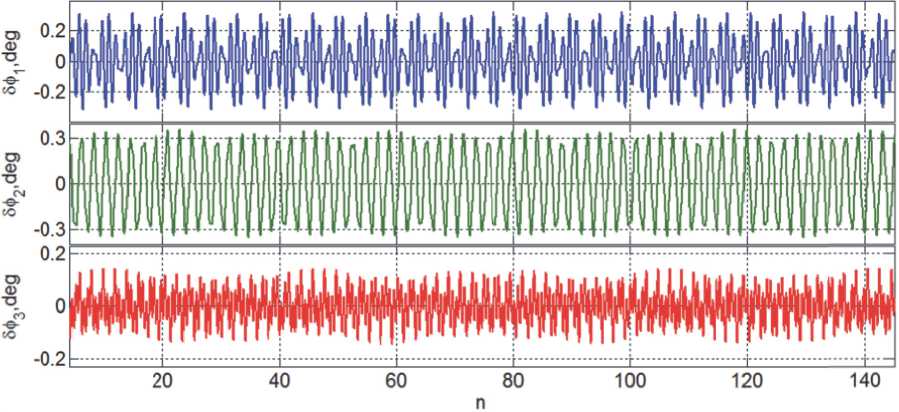
Рис. 7. Компоненты вектора угловой погрешности при гравитационной стабилизации КА
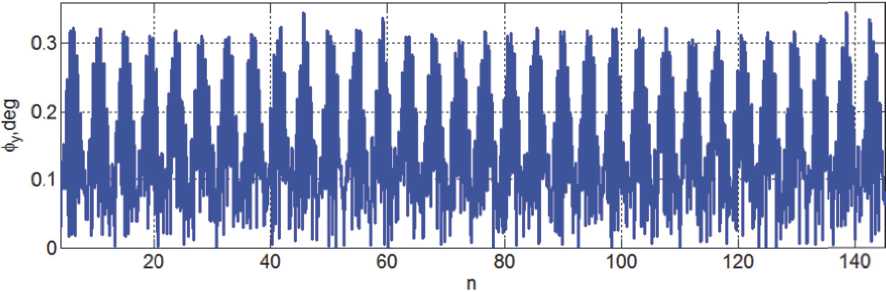
Рис. 8. Пространственный угол ориентации орта b 2 относительно местной вертикали
ника (10 суток), а на рис. 9 - изменения угла ф y на последних 10 витках. Гравитационные возмущения от Луны и Солнца приводят к «модуляции амплитуды» пространственных угловых колебаний КА с месячным и годовым периодами, а усреднённая скорость изменения такой «амплитуды» по модулю не превышает 0.015 град/сут.
Компьютерная имитация показала, что в силу отсутствия какого-либо физического демпфирования в режиме гравитационной стабилизации спутника «амплитуда» его нелинейных угловых колебаний относительно ОСК в течение месяца может возрасти до значения Фe = 0.85 град. При анализе движения КА на ССО в долговременном экономичном аварийном режиме необходимо также учитывать влияние сил давления солнечного излучения, где требуется информация о форме, размерах и отражательных свойств конструкции спутника. Численные расчеты показали, что при пассивной гравитационной стабилизации спутника влияние сил давления солнечного излучения в течение месяца
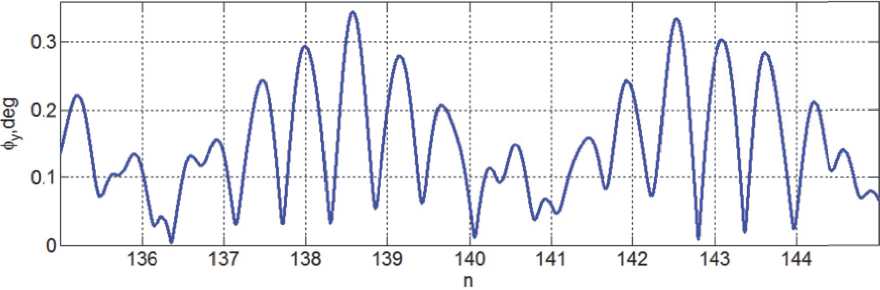
Рис. 9. Угол ориентации орта b 2 относительно местной вертикали на последних 10 витках
может привести к дополнительному возрастанию «амплитуды» его нелинейных угловых колебаний относительно ОСК до значения ф e = 1.27 град. Текущая оценка «амплитуды» угловых колебаний КА регулярно выполняется на основе фильтрации измерений бортовой навигационной системы по сигналам спутников ГЛОНАСС/ GPS. При превышении такой оценки заданного значения (например, ф e = 1.5 град) включается закон цифрового управления МП (3), который в течение трёх витков орбитального полета гарантированно обеспечивает возвращение КА в орбитальную ориентацию с требуемой точностью.
ЗАКЛЮЧЕНИЕ
Разработаны алгоритмы экономичного управления ориентацией информационного спутника на ССО в долговременном аварийном режиме. Предложена и исследована новая схема выполнения аварийного режима, где существенно используются свойства солнечно-синхронной орбиты при сочетании пассивной гравитационной стабилизации и ситуационного активного цифрового управления ориентацией спутника с помощью магнитного привода. Приведены результаты компьютерной имитации аварийной ориентации спутника землеобзора на солнечносинхронной орбите высотой 720 км.
Список литературы Экономичное цифровое управление в аварийном режиме стабилизации спутника на солнечно-синхронной орбите
- Сомов Е.И., Бутырин С.А. Энергосберегающее цифровое управление магнитным приводом в аварийном режиме ориентации спутника//Известия Самарского научного центра РАН. 2018. Т. 20. № 1. С. 38-44.
- Сомов Е.И., Бутырин С.А., Сомова Т.Е. Энергосберегающее управлением магнитным приводом в аварийном режиме ориентации информационного спутника на солнечно-синхронной орбите//11 Российская мультиконфенция по проблемам управления. Материалы конференции «Управление в аэрокосмических системах». Санкт -Петербург. 2018. С. 221-229.
