Эксперимент по наблюдению подповерхностных целей в РСА VHF диапазона

Автор: Борисенков А.В., Голубцов Н.Н., Горячкин О.В., Диязитдинова А.А., Кубанов В.П., Лифанов А.С., Хохлов Е.Н.
Журнал: Инфокоммуникационные технологии @ikt-psuti
Рубрика: Радиотехнические системы
Статья в выпуске: 3 (91) т.23, 2025 года.
Бесплатный доступ
В настоящее время радиолокаторы с синтезированной апертурой, работающие в VHF-P диапазонах частот, часто применяются при решении задач подповерхностного зондирования. При наблюдении подповерхностных объектов информационные возможности этих систем изучены недостаточно. В данной работе рассматривается задача проведения натурных экспериментов по определению глубины обнаружения подповерхностных целей в условиях размещения радиолокаторов с синтезированной апертурой VHF диапазона на автомобиле. Для решения задачи предложена комбинированная методика, сочетающая натурные измерения с активным ответчиком в качестве цели, а также расчеты отношения сигнал/(шум+фон) на радиолокационном изображении. Показано, что при проведении экспериментов достаточно варьировать глубиной погружения только передающей антенны ответчика, что существенно упрощает натурный эксперимент. При этом предложенная методика натурного эксперимента учитывает как характеристики реальной поверхности, так и среды, в которую цель погружена.
Радиолокатор с синтезированием апертуры, подповерхностная цель, беспилотный летательный аппарат, отношение сигнал/(шум +фон), VHF диапазон частот
Короткий адрес: https://sciup.org/140313591
IDR: 140313591 | УДК: 621.396.969 | DOI: 10.18469/ikt.2025.23.3.14
Experiment on Observing Subsurface Targets in the VHF Band SAR
Currently, synthetic aperture radars operating in the VHF-P frequency bands are often used to solve subsurface sensing problems. The information capabilities of these systems in the context of observing subsurface objects have not been sufficiently studied yet. In this article, we consider the task of conducting field experiments in order to determine the depth of detection of subsurface targets in conditions of placing a VHF band radar on a car. To solve the problem, a combined technique hat combines field measurements with an active responder as a target and calculations of the signal-to-noise+background ratio on a radar image, was offered. It is shown that when conducting experiments, variation of the depth of immersion of the transmitting antenna of the responder only is highly sufficient, and greatly simplifies the field experiment. At the same time, the proposed method of field experiment takes into account both the characteristics of the real surface and the environment in which the target is immersed.
Текст научной статьи Эксперимент по наблюдению подповерхностных целей в РСА VHF диапазона
В настоящее время развитие техники беспилотных летательных аппаратов (БПЛА) стимулирует новые исследования в области дистанционного зондирования Земли (ДЗЗ). В частности, растет интерес к применению для целей ДЗЗ радиолокаторов с синтезированной апертурой (РСА), размещенных на БПЛА.
Среди задач ДЗЗ, в которых использование РСА на БПЛА стимулирует новые исследования, можно выделить задачу наблюдения подповерхностных и укрытых листвой объектов [1] с использованием РСА, работающих в VHF диапазоне [2–8].
Одной из актуальных тем исследований в данной области является количественное определение информативности РСА при наблюдении подповерхностных объектов.
В частности, в работе [9] предложена методика расчета показателей информативности РСА при наблюдении подповерхностных целей, в рамках которой рассчитывается отношение сигнал/ (шум+фон) на радиолокационном изображении для тестовой подповерхностной цели, затем на основе заданного отношения сигнал/(шум+фон) определяются значения глубины обнаружения цели в зависимости от свойств среды, подстила- ющей поверхности, параметров РСА. В качестве тестовой подповерхностной цели рассматривается линейный симметричный вибратор (ЛСВ).
Данная статья является продолжением этих исследований в части постановки натурных экспериментов по отработке предлагаемой методики.
Натурный эксперимент
Натурный эксперимент по радиолокационной съемке подповерхностных объектов проводился с использованием РСА МРЛК-2 (ПГУТИ, г. Самара) [5; 6; 10; 11]. РСА МРЛК-2 размещается на БПЛА роторного типа.
Основные технические параметры РСА МРЛК-2 представлены в таблице 1.

Лифанов А.С., Хохлов Е.Н., 2025
Таблица 1. Основные технические параметры РСА
МРЛК-2
|
№ |
Наименование |
Значение |
|
1 |
Диапазон частот зондирующего сигнала |
115…165 МГц |
|
2 |
Полоса захвата (при высоте полета 100 м) |
15 км |
|
3 |
Разрешающая способность |
3 м |
|
4 |
Импульсная выходная мощность |
не менее 70 Вт |
Одной из проблем, возникающих при постановке натурных экспериментов с БПЛА, являются ограничения зоны полета в районе размещения тестовой цели. Одним из путей преодоления этой проблемы может стать размещение РСА на движущимся автомобиле. Однако в этом случае возникает проблема резкого падения энергопотенциала РСА в процессе наблюдении подповерхностной или укрытой цели при малых углах визирования.
Для преодоления описанных трудностей в [9] предложено использовать активный ответчик, состоящий из 2-х линейных симметричных вибраторов, один из которых является приемным, а другой передающим. Зондирующий сигнал РСА, возникающий на выходе приемной антенны ответчика, усиливается линейным малошумящим усилителем (МШУ) и передается через передающую антенну в направлении приемника РСА. Отсутствие возбуждения ответчика достигается пространственным разнесением приемной и передающей антенны.
На рисунке 1 показан вариант установки РСА МРЛК-2 на автомобиле.

Рисунок 1. Установка РСА МРЛК-2 на автомобиле
На рисунке 2 и 3 показаны приемная и переда- ющая антенны ответчика соответственно, размещенные над поверхностью Земли.

Рисунок 2. Приемная антенна ответчика над поверхностью Земли

Рисунок 3. Передающая антенна ответчика в защитном диэлектрическом контейнере
На рисунке 4 показано радиолокационное изображение (РЛИ) передающей антенны ответчика, полученное РСА МРЛК-2.
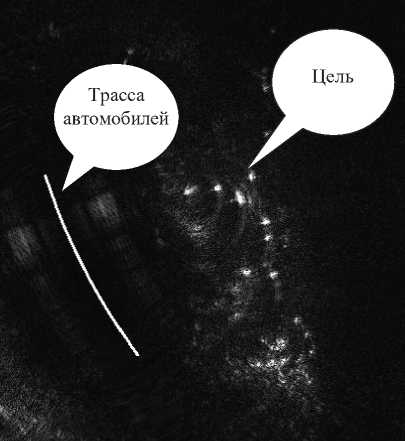
Рисунок 4. Радиолокационное изображение передающей антенны ответчика, расположенного над поверхностью Земли
Для решения проблемы влияния «малых углов» визирования цели коэффициент усиления ответчика в эксперименте составлял 50 дБ.
В следующем эксперименте (рисунок 5) передающая антенна лежит на земле за бруствером (ширина 0,5 м, высота 0,4 м), перекрывающим прямую видимость РСА. Приемная антенна находится в том же положении (рисунок 2).
Радиолокационное изображение ответчика в этом случае показано на рисунке 6.
Следующий эксперимент демонстрирует возможность наблюдения подповерхностной цели. На рисунке 7 показана передающая антенна, лежащая на земле за бруствером и дополнительно засыпанная слоем земли примерно 20 см. Приемная антенна ответчика находится в том же положении (рисунок 2). Передающая антенна при погружении в грунт укорачивалась с целью обеспечения лучшего согласования входа и выхода МШУ ответчика.
Радиолокационное изображение ответчика в этом случае показано на рисунке 8.
Почва, задействованная в эксперименте, представляет собой очень влажную глину. В расчетах использовалось значение относительной диэлектрической проницаемости среды £ 1 = 10, удельной проводимости среды с , = 0,01 См/м.

Рисунок 5. Передающая антенна ответчика на земле за бруствером (0,5 м), перекрывающим прямую видимость РСА
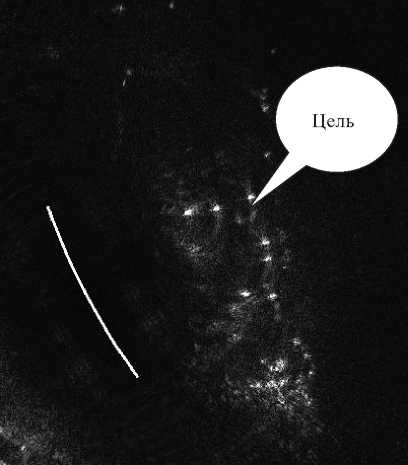
Рисунок 6. Радиолокационное изображение передающей антенны ответчика, расположенного на земле
Как видно из эксперимента основные потери энергопотенциала РСА (яркость цели на радиолокационном изображении) при наблюдении активного ответчика происходили в процессе снижения его высоты над землей. Этот факт является следствием наблюдения цели под очень малым углом визирования (меньше 1 град., относительная высота 2-3 м).

Рисунок 7. Передающая антенна, лежащая на земле за бруствером и дополнительно засыпанная слоем земли
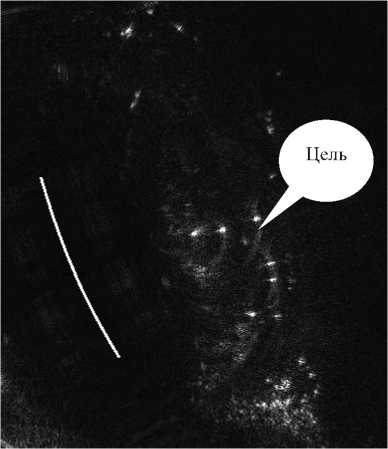
Рисунок 8. Радиолокационное изображение передающей антенны ответчика, расположенного за бруствером и присыпанного слоем земли.
Высота полета, м
Рисунок 9. Зависимость отношения сигнал/(шум+фон) на радиолокационном изображении при коэффициенте усиления МШУ ответчика 50 дБ, удельной эффективности площади рассеяния (ЭПР) фона -20дБ
В этом случае с одной стороны, влажная поверхность Земли как бы «разворачивает» диаграмму обратного рассеяния цели вверх и вбок, с другой стороны тот же эффект частично происходит и с диаграммой направленности приемо-передающей антенны РСА, размещенной на крыше автомобиля.
Для анализа наблюдаемых эффектов воспользуемся методикой, описанной в [9].
На рисунке 9 показана зависимость отношения сигнал/(шум+фон) на радиолокационном изображении при коэффициенте усиления МШУ равном 50 дБ. Как можно видеть при малых значениях высоты РСА (случай «малых углов») ответчик уверенно обнаруживается на РЛИ только если приемная антенна находится над поверхностью Земли (на рисунке 1 ЛСВ).
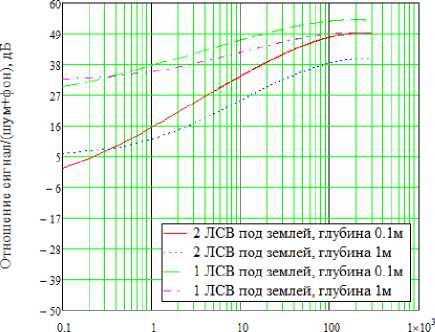
На рисунке 10 показана зависимость отношения сигнал/(шум+фон) на радиолокационном изображении при коэффициенте усиления МШУ равном 2 дБ, что соответствует случаю пассивного короткозамкнутого ЛСВ под землей. Как можно видеть, ответчик (на рисунке 2 ЛСВ) может быть обнаружен на РЛИ только при больших углах визирования.
Более уверенно данная цель обнаруживается на менее маскирующих фонах, как это видно из рисунка 11.
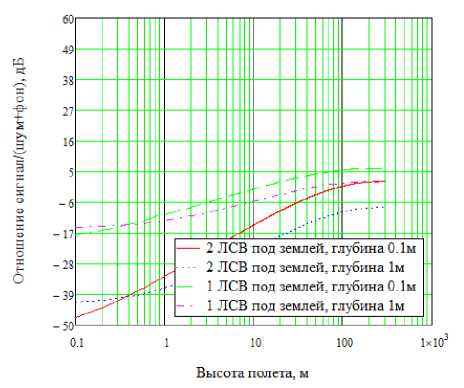
Рисунок 10. Зависимость отношения сигнал/(шум+фон) на радиолокационном изображении при коэффициенте усиления МШУ ответчика 2 дБ, удельной ЭПР фона -20дБ
Кроме этого, как видно по графикам, яркость подповерхностной цели слабо зависит от глубины залегания в интервале 0,1…1 м, что подтверждается на натурных РЛИ (рисунки 6 и 8).
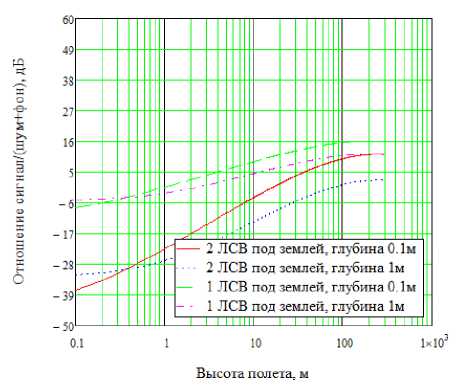
Рисунок 11. Зависимость отношения сигнал/(шум+фон) на радиолокационном изображении при коэффициенте усиления МШУ ответчика 2 дБ, удельной ЭПР фона -30дБ
Расчеты проведены для следующих значений параметров аппаратуры и геометрии эксперимента: Импульсная мощность передатчика РСА P im = 70 Вт, интервал синтеза апертуры T S = 20 c, высота антенны РСА относительно цели (передающей антенны ответчика) H = 2 м, частота повторения импульсов F p = 500 Гц, шумовая температура антенны РСА – 10000К, минимальная поверхностная дальность от трассы до ответчика – 300 м.
Заключение
Разработанная в [9] методика может быть использована не только для количественной оценки информативности РСА при наблюдении подповерхностной цели, но и для проведения натурных экспериментов в условиях «малых углов визирования». В этом случае глубина обнаружения цели в РСА МРЛК-2 может быть измерена в эксперименте с активным ответчиком в условиях, когда приемная антенна ответчика находится над землей, что существенно упрощает организацию экспериментальных работ по оценке информативности РСА подповерхностного зондирования.
