Экспериментальное определение диссипативных свойств электровязкоупругих систем с внешними электрическими цепями

Автор: Юрлов Максим Александрович
Статья в выпуске: 1, 2012 года.
Бесплатный доступ
Прикрепленные к поверхности конструкции пьезоэлементы с шунтирующими цепями образуют рассеивающее энергию устройство для повышения диссипативных свойств механической системы. Благодаря пьезоэлектрическому эффекту часть механической энергии колебаний преобразуется в электрическую энергию, которая может быть рассеяна. Данная работа посвящена экспериментальному исследованию эффективности гашения колебаний конструкций с пьезоэлементами, зашунтированными внешними пассивными электрическими цепями. Исследованы резистивные и резистивно-индукционные цепи. Рассматривается консольная стальная балка с прикрепленными к ее поверхности пьезоэлементами, подверженная внешнему гармоническому воздействию. Сопротивление и индуктивность шунтирующей электрической цепи варьируются до достижения максимального гашения колебаний первой и/или второй моды колебаний. Доказано, что представленная методика позволяет значительно снизить вибрации при наличии в цепи индуктивности по сравнению с чисто резистивной цепью. Желание избежать требуемых при этом больших катушек индуктивности привело к использованию синтетических индуктивностей - гираторов (собранных из операционных усилителей).
Внешние электрические цепи, шунтирование пьезоэлектриков, резонансные шунтирующие цепи, собственные колебания
Короткий адрес: https://sciup.org/146211408
IDR: 146211408 | УДК: 531/534:53
Experimental determination of dissipative properties of electro viscoelastic systems with external electric circuits
Piezoelectric elements connected to shunt circuits and bonded to a mechanical structure form a dissipation device that can be designed to add damping to the mechanical system. Due to the piezoelectric effect, part of the vibration energy is transformed into electrical energy that can be conveniently dissipated. This paper aims to experimentally validate the effectiveness of structural vibration suppression by piezoelectric with passive shunt circuits. Two different electric circuits are examined a purely resistive circuit and an inductive-resistive one. A harmonic force is applied to a simple steel cantilevered beam, by varying the inductance and resistance values, the electric circuits are optimized in order to reduce forced vibrations close to the first and the second resonance frequencies. It is proved that the presented technique allows for a substantial reduction of vibration with the inductances in circuit when compared with purely resistive circuit. Also it is important to know that large inductances are frequently required, leading to the necessity of using synthetic inductors - gyrators (obtained from operational amplifiers).
Текст научной статьи Экспериментальное определение диссипативных свойств электровязкоупругих систем с внешними электрическими цепями
Шунтирование пьезоэлементов конструкций внешними электрическими цепями для демпфирования колебаний – очень популярная методика в тех технических приложениях, где требования к малым размерам и весу играют решающую роль и где практически нет доступа к источнику электроэнергии. Шунтирование позволяет достаточно просто и дешево управлять колебаниями конструкций, эффективно подавляя нежелательные колебания без использования дополнительных сенсоров [1].
В литературе описано применение методики шунтирования к демпфированию колебаний космических конструкций, лопастей вертолета, подавлению нелинейного ультразвукового панельного флаттера, для контроля формы и демпфирования колебаний телескопов, подавления вибрации лопаток турбомашин, снижения уровня шума в машинах, подавления эха от подводной лодки, снижения вибрации дисководов в компьютерах и т.д.
По сравнению с традиционными способами демпфирования механических колебаний у такого способа есть ряд преимуществ. К ним можно отнести простую реализацию внешних электрических цепей, так как для них требуется только несколько стандартных электронных компонентов; в некоторых ситуациях не требуется никакой дополнительной электроники или источников питания; в ряде случаев не требуются датчики обратной связи. Кроме того, данный подход к демпфированию колебаний конструкций выигрывает в стабильности, надежности, в отсутствии необходимости сложных цифровых процессоров, разработки параметрических моделей при проектировании системы демпфирования колебаний конструкции [1].
Ключевой проблемой демпфирования колебаний с помощью шунтирующих внешних электрических цепей является нахождение самой простой шунтирующей цепи, с помощью которой наиболее эффективно осуществляется демпфирование колебаний конкретной конструкции.
Требования к дизайну шунтирующей цепи могут быть сведены к следующим:
-
– шунтирующая цепь должна минимизировать колебания конструкции, то есть, должна демпфировать механические колебания максимально эффективно;
-
– эффективность демпфирования не должна зависеть от изменений параметров системы, и ее стабильность должна быть гарантирована;
-
– шунтирующая цепь не должна требовать для работы источник питания;
-
– поскольку цепь инте г рируется в конструкцию, ее размер должен быть настолько мал, насколько это возможно.
За последнее десятилетие было разработано множество различных шунтирующих цепей, которые по способу демпфирования колебаний могут быть разделены на активные и пассивные. В этой работе рассматривается пассивный способ демпфирования колебаний стальной балки с пьезоэлементами, присоединенными к её поверхности и зашунтированными внешними электрическими цепями.
Пассивные шунтирующие цепи могут быть разделены на линейные и нелинейные. Среди линейных пассивных цепей, в свою очередь, можно выделить следующие:
-
– резистивные цепи, состоящие только из резистора. Такие шунты очень просты в исполнении, дешевы и для работы не требуют дополнительного источника энергии. Однако они не всегда демпфируют колебания конструкций, в отдельных случаях снижение амплитуды колебаний невозможно измерить;
– резонансные цепи, к которым можно отнести резонансные одномодовые или мультимодовые R-L -цепи. Такие шунты создают электрическую цепь с резонансом, который определяется емкостью пьезоэлектрика. Если этот электрический резонанс настроен на одну из собственных частот конструкции, то осуществляется эффективное демпфирование соответствующей моды колебаний. В литературе этот способ часто сравнивают с механическим демпфером.
Резонансные цепи можно, в свою очередь, разделить:
-
– на одномодовые резонансные шунты, которые представляют собой параллельное или последовательное соединение сопротивления R и индуктивности L ;
-
– мультимодовые резонансные шунты, позволяющие демпфировать несколько мод колебаний конструкции, используя при этом один пьезоэлектрический участок.
Однако все резонансные шунты имеют общий недостаток – у них степень демпфирования колебаний очень чувствительна к изменениям параметров системы. В этом случае сбивается настройка резонансных шунтов, и они перестают работать как демпферы колебаний систем. Поэтому возникли резонансные одно- и мультимодовые шунты, настраиваемые в режиме реального времени – в ходе их работы. Однако техническое исполнение таких адаптивных резонансных шунтов является очень громоздким;
-
– распределенные электрические сети представляют собой цепи, связывающие несколько пьезоэлектрических участков.
Однако их техническое решение приводит к очень сложным сетям с гираторами и трудно встраиваемыми трансформаторами, которые требуют активных фильтров. Последние результаты, по имеющимся в литературе данным, полученные на простых распределенных сетях, сопоставимы с результатами, полученными при использовании резонансных шунтов для одного пьезоэлемента.
Пьезоэлектрические элементы, соединенные шунтирующей цепью и присоединенные к механической конструкции, являются устройствами, на которых происходит диссипация энергии и тем самым осуществляется дополнительное демпфирование колебаний. Пьезоэлектрический эффект обеспечивает преобразование части энергии колебаний в электроэнергию, которая может быть просто рассеяна через шунтирующую цепь, которая и представляет собой механизм пассивного демпфирования. Поэтому, применяя соответствующие электрические цепи, можно рассеять внутреннюю энергию и, как следствие, подавить колебания посредством добавления пассивного демпфирования [2].
Поскольку пьезокерамика электрически действует как конденсатор (емкость), применение шунтирующих цепей для диссипации энергии является самым простым методом для этой цели. Самый простой шунт – просто размещение сопротивления (резистора) через электроды. Несмотря на первое упоминание в литературе в работе [3], авторство концепции демпфирования колебаний с помощью шунтирования внешними электрическими цепями пьезоэлектриков отдано Hagood и von Flotow [4], которые продемонстрировали, что последовательная LR-цепь может существенно снизить колебания единственной моды [5].
Для демпфирования требуемых мод и частот необходимо размещать элементы из пьезокерамики в области высокой интенсивности напряжений, что показано в [6]. Они также предложили использовать распределение резисторов для уменьшения изменения степени демпфирования при различных частотах.
Резонансная последовательная шунтирующая цепь была предложена, например, в работах [4, 7–10]. Параллельная резонансная шунтирующая цепь впервые была предложена в [11].
В работах В.П. Матвеенко, Е.П. Клигмана, Н.А. Юрловой для численной оценки динамических характеристик моделируемой системы было предложено применять решение задачи о собственных колебаниях электровязкоупругого тела с различными вариантами внешних электрических цепей [12–14]. Данная работа на модельных экспериментах демонстрирует эффективность предложенного подхода к поиску оптимальных по динамическим характеристикам smart-структур на основе пьезоматериалов с внешними электрическими цепями.
1. Демпфирование продольных колебаний
Для демонстрации эффекта демпфирования продольных механических колебаний с помощью пьезоэлементов и внешних электрических цепей был проведен эксперимент, схема которого представлена на рис. 1.
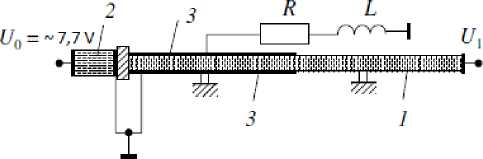
Рис. 1. Схема эксперимента
Пьезокерамический стержень 1 прямоугольного сечения с поперечной поляризацией установлен на жестких подставках. Стержень электродирован наполовину по его длине. С помощью пьезоэлемента 2 возбуждаются продольные колебания, при этом на электродах 3, расположенных на боковых поверхностях, возникает разность электрических потенциалов. Для гашения механических колебаний к электродам 3 подключается электрическая цепь, на которой происходит диссипация электрической энергии в виде тепла. Уровень амплитуды механических колебаний определяется опосредованно через электрический потенциал U1 , возникающий на свободном конце стержня.
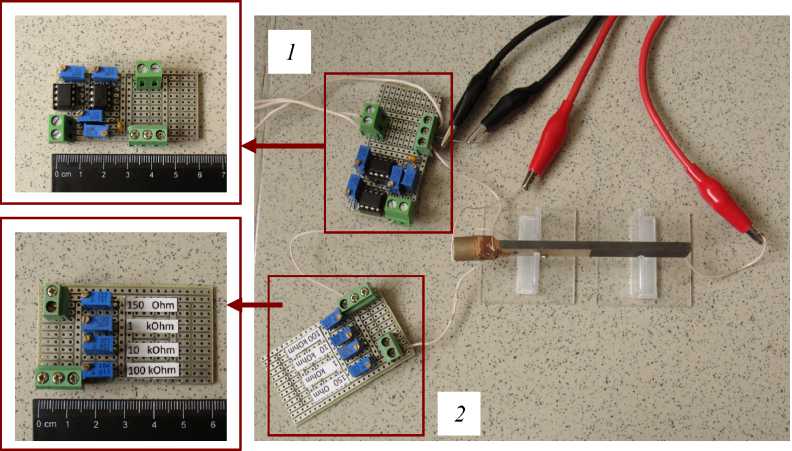
Рис. 2. Экспериментальный образец с последовательно соединенными переменными резисторами ( 1 ) и гиратором ( 2 )
Для гашения колебаний рассматривалось два типа электрических цепей: резистивная и резистивно-индуктивная. В качестве резистивной цепи использовались последовательно соединенные переменные резисторы (рис. 2), что позволило подстраивать сопротивление в достаточно широком диапазоне. Вместо катушки индуктивности использовался гиратор, электрическая схема которого представлена на рис. 3.
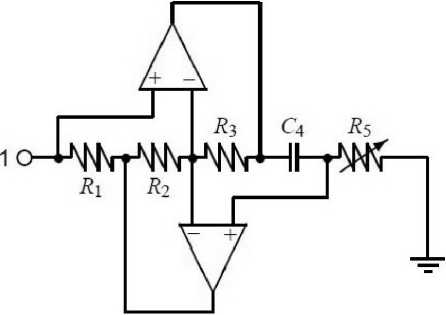
Рис. 3. Электрическая схема гиратора
Подробное описание эксперимента и полученные результаты приведены в работе [15]. В ходе исследования было продемонстрировано, что в случае когда достигается максимальное демпфирование колебаний, механическая энергия практически полностью преобразуется в электрическую энергию колебаний LC- контура и рассеивается в виде электромагнитного излучения и джоулевого тепла. При этом собственная частота LC -контура совпадает с соответствующей частотой механического резонанса стержневой системы. Данные результаты совпадают с численными, полученными в работе [13].
2. Демпфирование поперечных колебаний
В качестве объекта исследования была выбрана тонкостенная консольная стальная балка с прикрепленными пьезоэлектрическими пластинками (рис. 4).
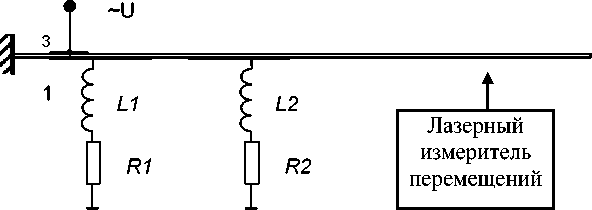
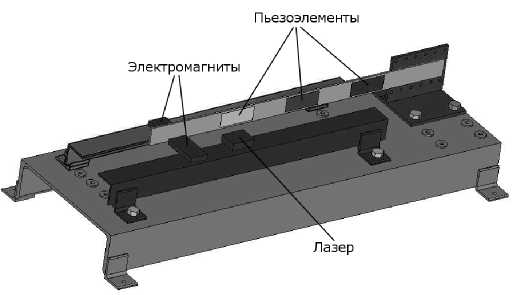
Рис. 4. Схема эксперимента и платформы для его проведения
Для экспериментального исследования демпфирования поперечных колебаний с помощью пьезоэлементов и внешних электрических цепей была изготовлена платформа (см. рис. 4), на которой возможны различные способы возбуждения колебаний, в том числе при помощи электромагнитов, то есть без физического контакта. Фотография реализованной платформы приведена на рис. 5.
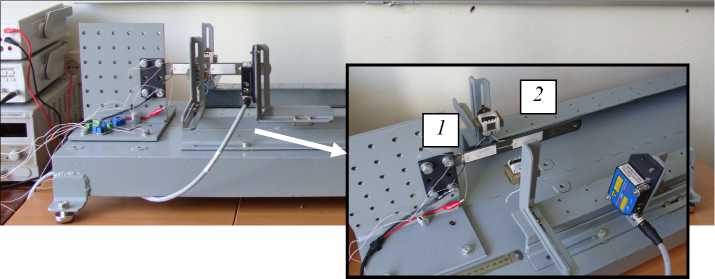
Рис. 5. Общий вид экспериментальной платформы для проведения экспериментов по исследованию диссипативных свойств конструкций с пьезоэлементами
Колебания возбуждались несколькими способами: 1) подачей синусоидального сигнала напряжением 10V на третий пьезоэлемент, находящийся с обратной стороны консоли; 2) подачей синусоидального сигнала 11,88 Гц (резонансная частота первой моды колебаний), напряжения 25V через диоды на пару электромагнитов. Каждый электромагнит находился от балки на расстоянии 15 мм.
Измерения в обоих случаях осуществлялись на свободном конце консоли бесконтактным способом с помощью лазерного измерителя расстояния с разрешающей способностью лазера 0,01 мм.
В первой серии экспериментов исследовалось влияние места расположения пьезоэлемента, зашунтированного R-L -цепью, на степень демпфирования колебаний балки.
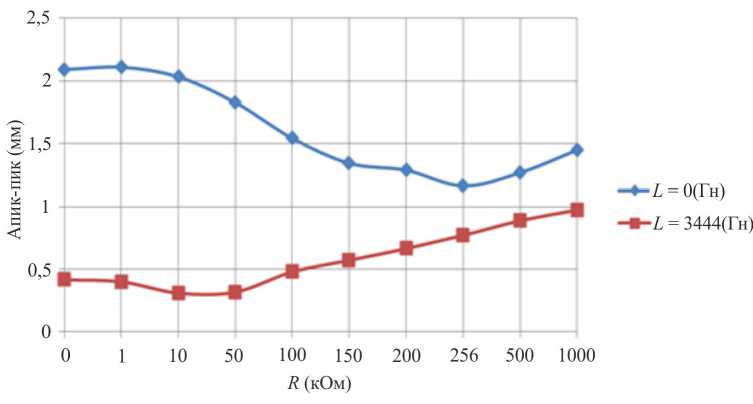
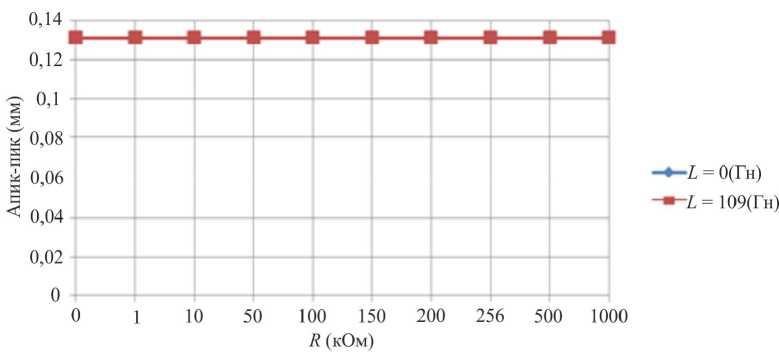
На первом этапе эксперименты проводились при подключении к демпфирующей цепи только первого пьезоэлемента, наклеенного у крепления (пьезоэлемент 1 на рис. 5). Значения амплитуды колебаний на свободном конце балки на первом резонансе 11,68 Гц в зависимости от величины сопротивления при наличии оптимальной индуктивности и при ее отсутствии приведены на рис. 6, а , а для второй моды – на втором резонансе 65,7 Гц – на рис. 6, б . Как видно из рис. 6, б , пьезоэлемент 1 практически не влияет на гашение второй моды (значения амплитуды колебаний на свободном конце балки при наличии резистивной цепи совпадают со значениями амплитуды колебаний на свободном конце балки при наличии резистивно-индукционной цепи).
а
б
Рис. 6. Зависимость амплитуды первой ( а ) и второй ( б ) мод колебаний свободного конца балки от величины сопротивления при наличии пьезоэлемента, установленного в зоне консольного крепления балки
Второй цикл экспериментов проводился при подключении к демпфирующей цепи только второго пьезоэлемента, наклеенного в центре балки (пьезоэлемент 2 на рис. 5).
Значения амплитуды колебаний на свободном конце балки на первом резонансе 11,68 Гц в зависимости от величины сопротивления при наличии оптимальной индуктивности и при ее отсутствии приведены на рис. 7, а , а для второй моды – на втором резонансе 65,7 Гц – на рис. 7, б .
Третий цикл экспериментов проводился при параллельном подключении к демпфирующей цепи одновременно первого и второго пьезоэлементов (см. рис. 5). В третьем цикле колебания возбуждались как пьезоэлементом с обратной стороны балки, так и с помощью магнитов, расположенных у разных участков балки. Значение амплитуды колебаний на первом резонансе 11,68 Гц в зависимости от величины сопротивления при наличии оптимальной индуктивности и при ее отсутствии приведено на рис. 8, а, а для второй моды – на втором резонансе 65,7 Гц – на рис. 8, б.
б
Рис. 7. Зависимость амплитуды свободного конца балки первой ( а ) и второй ( б ) мод колебаний от величины сопротивления при подключении только второго пьезоэлемента, наклеенного в центре балки, к демпфирующей цепи
Значение амплитуды колебаний в зависимости от величины сопротивления и при наличии оптимальной индуктивности на первом резонансе при расположении электромагнитов у крепления балки приведено на рис. 9, а при расположении электромагнитов по центру балки (со сдвигом 80 мм от крепления) – на рис. 10.
б
Рис. 8. Зависимость амплитуды свободного конца балки первой ( а ) и второй ( б ) мод колебаний от величины сопротивления при параллельном подключении обоих пьезоэлементов к одной демпфирующей цепи
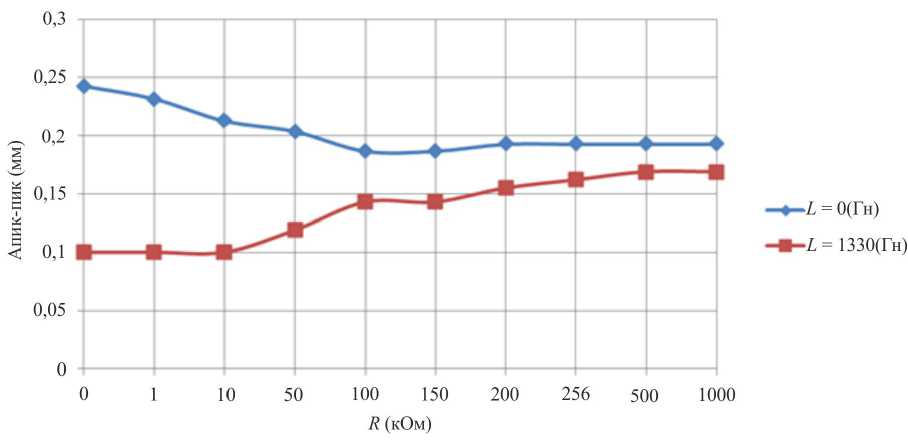
Рис. 9. Первая мода, параллельное подключение обоих пьезоэлементов к одной демпфирующей цепи, возбуждение колебаний электромагнитами у основания балки
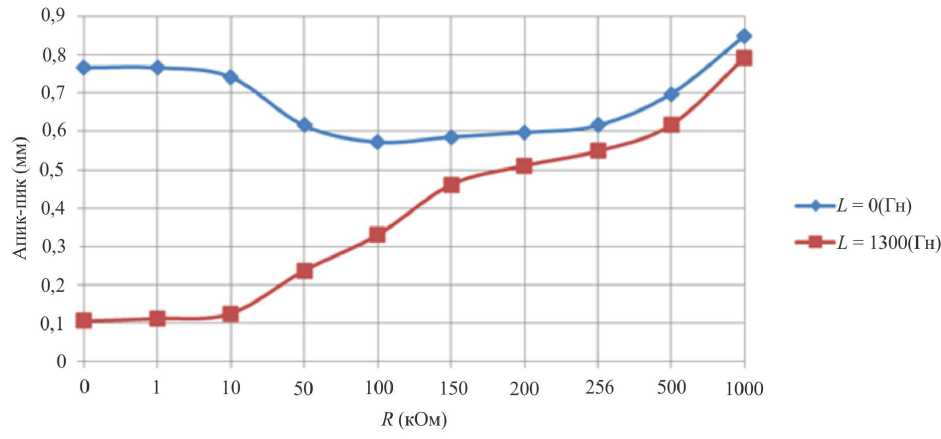
Рис. 10. Первая мода, параллельное подключение обоих пьезоэлементов к одной демпфирующей цепи при возбуждении колебаний электромагнитами, расположенными по центру балки
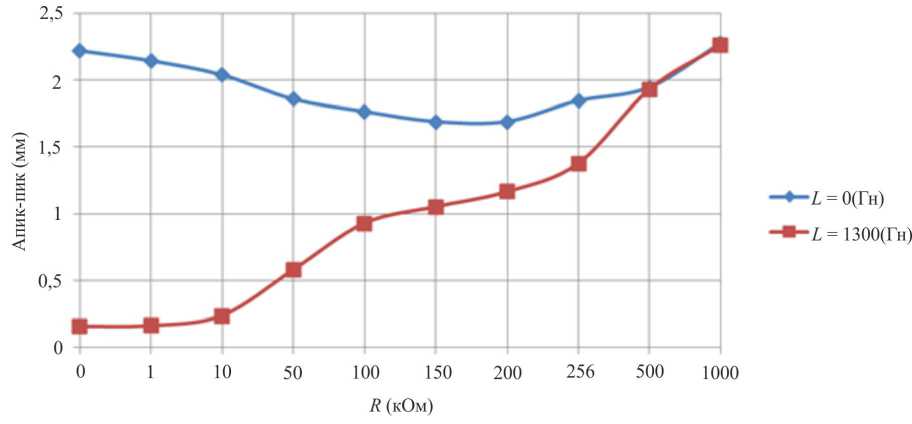
Рис. 11. Первая мода, параллельное подключение обоих пьезоэлементов к одной демпфирующей цепи, при возбуждении колебаний электромагнитами, размещенными у свободного края балки
Значение амплитуды колебаний на первом резонансе 11,88 Гц при расположении электромагнитов у свободного края балки, со сдвигом 10 мм от свободного края, в зависимости от величины сопротивления и при наличии оптимальной индуктивности приведено на рис. 11.
Из полученных результатов видно следующее:
-
– применение R-L -цепей для демпфирования колебаний конструкции более эффективно, чем просто резистивных цепей, содержащих только сопротивление R ;
-
– расположение пъезоэлемента у крепления оказывается более эффективным для демпфирования первой моды колебаний;
-
– при параллельном подключении обоих пъезоэлементов к одной внешней электрической цепи можно добиться большей степени демпфирования колебаний первой моды;
-
– при гашении второй моды, расположенный у крепления пъезо-элемент практически не влияет на гашение колебаний;
-
– характер завис и мости амплитуды колебаний от шунтирующей цепи не зависит от способа возбуждения колебаний.
Заключение
Несколько серий экспериментов с пьезокерамическими стержнями и стальной балкой с присоединенными к ее поверхности пьезоэлементами и внешними электрическими цепями показали, что оптимальное демпфирование колебаний достигается при наличии внешней индуктивно-резистивной цепи гашения. При этом стоит учитывать, что чрезмерное увеличение сопротивления или индуктивности может ухудшать способность внешней электрической цепи демпфировать колебания конструкции.
Сравнение экспериментальных и численных результатов [13] исследования показывает их полную качественную ид ентичность, что свидетельствует о достоверности разработанной математической модели.
Работа выполнялась при поддержке Гранта Президента РФ НШ-5389.2012.1, программы Президиума РАН (12-П-1-1018), РФФИ (проект №12-01-00453).
