Экспериментальные исследования динамических свойств магнитореологических эластомеров

Автор: Коровкин Юрий Викторович, Минаев Андрей Янович, Степанов Геннадий Владимирович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Актуальные проблемы машиностроения
Статья в выпуске: 2-4 т.17, 2015 года.
Бесплатный доступ
Создание электропроводящих магнитореологических эластомеров позволяет при воздействии магнитного и электрического поля в исследуемых материалах генерировать сжатие и растяжение материала, что даёт возможность использовать их в качестве активных демпферов в виброизолируемых конструкциях, а также в качестве элементов робототехники.
Электропроводящие магнитострикционные эластомеры, сжатие, растяжение, магнитное поле, электрическое поле, активный демпфер, робототехника
Короткий адрес: https://sciup.org/148203664
IDR: 148203664 | УДК: 620.1.05
The experimental studies of magnetorheological elastomers dynamic properties
Creation of conducting magnetorheological elastomers allows at influence of magnetic and electric field in the studied materials to generate compression and stretching of material that gives the chance to use them as the fissile dampers in vibroisolated designs, and also as robotics elements.
Текст научной статьи Экспериментальные исследования динамических свойств магнитореологических эластомеров
измерительного оборудования, позволяющая создавать с помощью виртуальных приборов и записывать на компьютер воздействие различных по своим динамическим характеристикам типов или видов колебаний и ударов на испытуемый образец. Характеристики возбуждаемых колебаний и ударов выбираются с помощью специальных устройств и приспособлений, создавая как реальную, так и более сложную модель эксплуатации испытуемого изделия [3].
Исследуемые образцы закрепляются на столе вибровозбудителя [4]. Здесь же рядом с опорной частью образца закрепляется один из вибродатчиков – пьезоакселерометр, используемый в качестве опорного сигнала, регистрирующего колебания на входе образца. Другой вибродатчик установлен на верхней части образца для регистрации сигналов на выходе. Сигналы, поступающие от датчиков, передаются в усилители заряда, далее на блок питания и на вход АЦП. Выход АЦП подключён к USB входа компьютера. Для работы с находящейся в компьютере звуковой картой установлена программа ScV1.21, содержащая виртуальный генератор. Выход звуковой карты подключается к входу усилителя для управления частотой, амплитудой и формой колебаний стола вибратора с образцом. Виртуальный цифровой генератор может формировать сигналы различной формы и работает в диапазоне частот от нескольких герц до 10 кГц. В работе показаны широкие возможности использования виртуальных приборов на основе программы LabWIEW. Стенд позволяет проводить испытания с возможной амплитудой измеряемых ускорений до 1000 м/сек2. Амплитуда сигналов на выходе виртуального генератора до звуковой карты компьютера изменяется от 0,2 В до 1,0 В. Усилитель мощности передаёт напряжение на катушку питания вибратора до 2,5 В. Формы задаваемых сигналов могут быть синусоидальными, треугольными, прямоугольными, пилообразными. Число датчиков измерительных каналов до 16. Вес испытуемых изделий до 5 кг. На рис. 1 показан фрагмент лабораторного стенда с вибратором и записью сигналов на экране компьютера.

Рис. 1. Фрагмент лабораторного стенда
На столе вибратора вибродатчик измеряет входящие – Авх аплитудно-частотные характеристики. Поглощаемая в результате внутреннего трения в образце вибрация измеряется на выходе образца – Авых. На рис. 2 показаны образцы магнитоактивных эластомеров, установленные на столе вибростенда. В данной серии испытаний на вибростенде воспроизводился синусоидальный сигнал с плавной развёрткой частоты от 20 до 450 Гц. Величина возбуждения на столе вибратора была постоянной и составляла 4,1
м/сек2, что соответствовало 0,5 В на выходе звуковой карты компьютера. Была проведена серия экспериментов по определению результатов воздействия магнитных сил различной величины на сдвиг резонансных частот в образце в более высокочастотную область. Максимальная сила воздействия (притяжения образца) составляла 14,5 Н.
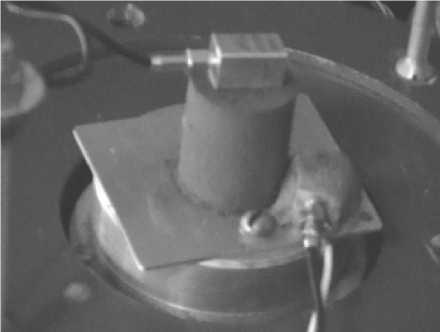
Рис. 2. Образцы магнитоактивных эластомеров с оснасткой
На рис. 3 показаны записи входных синусоидальных сигналов – Авх на столе вибратора, т.е. на входе образца на частоте колебаний на резонансных частотах 75-80 Гц. На рис. 3 они располагаются в диапазоне от 0 до -12,5 В. Сигналы, записанные на выходе – Авых эластомера показаны в виде резко выросших синусоидальных сигналов. На данной частоте колебаний образца регистрировался максимальный рост колебаний на выходе Авых >> Авх. Ускорения на частотах колебаний 75-85 Гц выросли более, чем в 4 раза.
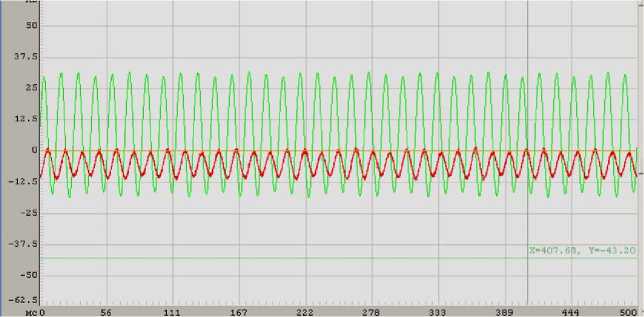
Рис. 3. Сигналы на входе и выходе образца
Исследовалась также степень влияния на сдвиг резонансных частот в низкочастотную область при установке различных по величине масс грузов (до 100 грамм) на испытуемый образец. В этом случае нагружения образцов было зафиксировано снижение резонансных частот до
35 Гц. Проведенные серии экспериментов с представленными материалами показали возможности влияния на расположение резонансных частот, как в сторону их увеличения так и снижения. На рис. 4 по вертикальной оси показано отношение выходных сигналов ускорений по отношению к входным Аотн = Авых/Авх. По горизонтальной оси располагается частота в герцах – Гц. На рис. 4 резонансные кривые, соответствующие 85 Гц, построены без нагрузки, резонансные кривые, соответствующие 170 Гц – при действии на образец магнитных сил. Установлено, что в зависимости от рассмотренных здесь видов нагружений представляется возможным плавно изменять или смещать резонансную частоту в исследуемом образце от 35 Гц до 150-170 Гц. Данный диапазон является существенно широким, поскольку позволяет почти в 5 раз изменять резонансные частоты магнитореологического эластомера. Проведенный этап исследований показал возможность управления резонансными частотами опытного образца магнитореологического эластомера с помощью воздействия на него различной силы магнитными полями.
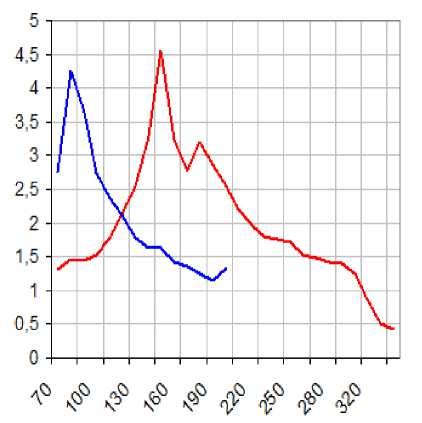
Рис. 4. Влияние магнитных сил на сдвиг резонансных частот: по вертикальной оси – Аотн, по горизональной оси – частота, Гц
Большой интерес у разработчиков новейших материалов и их технического использования в различных областях машиностроения является возможность управления динамическими свойствами такого материала путём мгновенного воздействия на его внутреннюю структуру. Например, с помощью воздействия на наночастицы, встроенные в матрицу этого материала, при подаче внешних электрических сигналов изменяется структурное состояние. При этом после окончания внешних воздействий такой материал сохраняет свои заложенные в него динамические характеристики. К данному классу так называемых интеллектуальных материалов можно отнести и электроактивные полиуретаны – эластомеры. Например, упругостью и деформацией создаваемых резиноподобных эластомеров можно управлять с помощью постоянных и переменных магнитных, а также и электрических полей.
В качестве примера рассмотрим возможность управляющего воздействия на цилиндрический образец магнитоактивого эластомера диаметром d=18,8 мм и высотой h=18,8 мм с намотанными на него проводниками (рис. 5). Необходимо определить, какой величины токи I 1 и I 2 требуется пропустить по проводникам в теле эластомера, чтобы возникшие вокруг них круговые магнитные индукции В 1 и В 2 создавали магнитные силы F 1 и F 2 взаимодействия, производящие деформацию эластомера, для примера в Δ h =0,8 мм. Чтобы определить силу, создающую деформацию образца диаметром d =18,8 мм и высотой h =18,8 мм образец был подвергнут сжатию гирей весом Р=500 г, что соответствует силе F≈5 H. Теперь необходимо рассчитать, какие токи I 1 и I 2 необходимо пропустить по проводникам, чтобы возникшие вокруг них круговые магнитные поля взаимодействовали с силой F =5H, которая должна создать деформацию в теле эластомера величиной Δ h =0,8 мм.

Рис. 5. Образец материала, управляемого электрическими полями
Магнитная индукция B , создаваемая 1-ым проводником в точках, в которых расположен 2ой провод, по закону полного тока равна µ ⋅ µ 0 ⋅ I 1
B = 2⋅π⋅ a . Подставим в формулу для силы F=I2 B dl значение B и получим формулу для силы взаимодействия магнитных полей в провод- никах:
F =
I 1 ⋅ I 2 ⋅ µ ⋅ µ 0 ⋅ dl
2 ⋅ π ⋅ a
,
где I 1 и I 2 – токи в проводниках, μ =2000 – относительная магнитная проницаемость ферромагнетика (наночастиц феррита, встроенных в матрицу эластомера), μ 0 =2π 10-7 Гн/м – магнитная постоянная (вакуума), dl – длина проводников, а – расстояние между проводниками. Преобразуем формулу силы для вычисления токов. Пусть токи будут равны по величине I 1 = I 2 . Тогда получим формулу для определения токов:
I 2 = F ⋅ 2 ⋅ π ⋅ a µ ⋅ µ 0 ⋅ dl
После подстановки значений, указанных под корнем величин, получим, что I ≈ 9 A, что является довольно существенной величиной. Для того, чтобы уменьшить токи, можно изменить одну из величин, в частности, можно выбрать ферромагнетик, (например, порошкообразный пермаллой, у которого μ =200000, тогда токи можно снизить приблизительно в 447 раз, т.е. I ≈ 0,02 A.
Выводы:
-
1. Для измерения параметров динамических характеристик управляемых эластомеров использовался лабораторный виброиспытательный комплекс, включающий в себя разработки виртуальных приборов для компьютера (LabVIEW).
-
2. Нагружение образца массами различной величины показали существенную возможность снижения резонансной частоты от 85 до 20 Гц.
-
3. Воздействие на образец магнитными полями различной силы позволяло плавно изменять, повышать зону расположения резонансных частот от 85 до 170 Гц.
-
4. В зависимости от воздействия различных рассмотренных здесь видов нагружений представляется возможным плавно изменять
-
5. Отношение выходных сигналов ускорений к входным на исследуемом образце показало на ряде частот снижение амплитуд колебаний ускорений от 3 до 5 раз и более (в том числе на частотах колебаний свыше 200 Гц), и характеризовало уровень демпфирования, представленного заказчиком нового образца материала.
-
6. Исследования, проводимые в ИМАШ РАН, позволили создать принципиально новый класс управляемых магнито- и электроактивных эластомеров. Данный класс материалов характеризуется возможностью управления колебательными или вибрационными процессами, происходящими в исследуемом образце при воздействии на него магнитными и электрическими полями.
резонансную частоту материала в достаточно широком частотном диапазоне от 20 до 170 Гц.
Список литературы Экспериментальные исследования динамических свойств магнитореологических эластомеров
- Chertovich, A.V. New Composite Elastomers with Giant Magnetic Response/A.V. Chertovich, G.V. Stepanov, E.Y. Kramarenko, A.R. Khokhlov//Macromolecular Materials and Engineering. 2010. Vol. 295, No 4. P. 336-341.
- Райхер, Ю.Л. Моделирование магнитострикционных деформаций в мягких магнитных эластомерах/Ю.Л. Райхер, О.В. Столбов//Вычислительная механика сплошных сред 2009. Т2. №2. С. 85-89.
- Коровкин, Ю.В. Исследование динамических свойств магнитоактивных эластомерных композитных материалов на лабораторном испытательном комплексе/Ю.В. Коровкин, А.Я. Минаев, Г.В. Степанов//Вестник машиностроения. 2014. №2. С. 67-69.
- Вибрации в технике. Справочник в 6 томах. Том 5, под ред. М.Д. Генкина. -М.: Машиностроение, 1981. 496 с.
