Экспериментальные исследования характеристик плазменных двигателей и приборов преобразования и управления как электрической нагрузки системы электропитания космического аппарата

Автор: Ермошкин Ю.М., Кочев Ю.В., Никипелов А.В., Первухин А.В., Симанов Р.С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.22, 2021 года.
Бесплатный доступ
Все большее распространение получают электрореактивные (плазменные или ионные) двигатели для коррекции орбиты космического аппарата (КА) и его довыведения на геостационарную орбиту. Это обусловлено большей экономичностью плазменных двигателей по сравнению с двигателями на химическом топливе. При разработке платформы КА важное место занимает согласование электрических характеристик системы электропитания (СЭП) и бортовых потребителей. Этот вопрос является по своему содержанию межсистемной проблемой. Отсутствие должного внимания к ее своевременному и правильному решению может затруднить работу системы электропитания космического аппарата. Наиболее важной подсистемой, которая оказывает существенное влияние на работу СЭП КА, является электрореактивная двигательная подсистема, так как она является наиболее мощной единовременно коммутируемой нагрузкой среди других бортовых потребителей. Переходные процессы в цепях питания, сопровождающие включение и отключение двигателя, могут достигать значительных величин. Электрореактивный двигатель работает только в связке со сложным электронным прибором - системой преобразования и управления (СПУ), которая преобразовывает напряжение бортового питания в набор напряжений, необходимых для работы элементов двигателя. Поэтому при предварительном проектировании двигательной подсистемы необходимо знать электрические характеристики переходных процессов и пульсаций в цепях питания связки двигатель - СПУ как электрической нагрузки СЭП. Получить расчетным методом характеристики такого рода процессов затруднительно. Поэтому наиболее распространенным и объективным методом получения данной информации является экспериментальный. В АО «ИСС» были проведены испытания, которые позволили измерить характеристики переходных процессов и пульсаций при запуске, работе и отключении плазменных двигателей различных типов, запитываемых от соответствующих СПУ. Работы проводились на вакуумном стенде ГВУ-60. В качестве источника питания, имитирующего СЭП, использовался технологический источник. В настоящей статье приводятся результаты измерений и анализа параметров переходных процессов и пульсаций на шинах питания СПУ для двигателей и приборов трех типов. Эти результаты следует рассматривать как предварительные. Показано, что наибольшие сложности могут возникнуть при эксплуатации высокомощных двигателей. Сделан вывод о том, что для каждого нового типа двигателей и СПУ целесообразно проводить стыковочные испытания двигательной подсистемы и системы электропитания КА.
Плазменный двигатель, двигательная подсистема, система преобразования и управления, переходные процессы, ток, напряжение, колебания
Короткий адрес: https://sciup.org/148322010
IDR: 148322010 | УДК: 629.783.525 | DOI: 10.31772/2712-8970-2021-22-1-137-150
Experimental investigations of a plasma thrusters and its power processing units performances like an electric load of a spacecraft's power condition system
Electro-jet (plasma or ion) thrusters are becoming increasingly common to correct a satellite orbit and perform orbit raising maneuvers to achieve the geostationary orbit. This is due to the greater efficiency of plasma thrusters compared to chemical ones. When developing a satellite platform, an important place is the matching up of the electrical characteristics of the electric power subsystem (EPS) and on-board consumers. Intrinsically, this issue is an intersystem problem. The lack of proper attention paid to find the timely and correct solution of this problem can complicate the operation of the satellite electric power subsystem. The most important subsystem, which has a significant impact on the operation of the satellite EPS, is the electric-jet propulsion subsystem, since among on-board consumers, this one is the most powerful consumer being switched simultaneously. Transients occurred in the power supply circuits following thruster firing and shut down processes can reach significant values. An electric jet thruster only runs in conjunction with a complex electronic unit - a power processing unit (PPU), which converts the voltage of the on-board power supply into a set of voltages necessary for thruster components to run. Therefore, in the preliminary design of the propulsion subsystem, it is necessary to know the electrical characteristics of transients and ripples in the power supply circuits of the thruster / PPU combination being an electrical load of the Electric power subsystem. It is difficult to obtain the characteristics of such processes by the calculation method. Therefore, an experimental method is the most common and objective method to obtain this information. JSC ISS carried out tests allowing to measure characteristics of transients and ripples under firing, running and shut down of plasma thrusters of different types powered by corresponding PPU’s. These tests were conducted using a vacuum chamber GVU-60. A test power supply was used to simulate EPS operation. This paper presents the results of measurements and analysis of parameters of transients and ripples on PPU power buses used for thrusters and devices of three types. These results are considered to be preliminary. It is shown that the greatest difficulties can arise when operating high-power thrusters. It is concluded that for each new type of thrusters and PPU’s it is advisable to conduct interface tests of the propulsion subsystem and the satellite electric power subsystem.
Текст научной статьи Экспериментальные исследования характеристик плазменных двигателей и приборов преобразования и управления как электрической нагрузки системы электропитания космического аппарата
Введение. В настоящее время все большее распространение в практической космонавтике получают электрореактивные (плазменные или ионные) двигатели для коррекции орбиты КА и его довыведения на геостационарную орбиту. Это обусловлено большей экономичностью плазменных двигателей по сравнению с двигателями на химическом топливе. Разрабатываются различные варианты двигательных подсистем на базе электрореактивных двигателей [1–5].
При разработке платформы КА важное место занимает согласование электрических характеристик системы электропитания (СЭП) и бортовых потребителей, обладающих значительной мощностью [6]. Отсутствие должного внимания к своевременному и правильному решению данной межсистемной проблемы может создать проблемы для обеспечения нормальной работы СЭП и, как следствие – космического аппарата в целом. Наиболее существенное влияние на работу СЭП КА оказывает электрореактивная двигательная подсистема, так как среди всех других потребителей она является наиболее мощной единовременно коммутируемой нагрузкой.
Электрореактивный двигатель работает только в связке со сложным электронным прибором – системой преобразования и управления (СПУ), которая преобразовывает напряжение бортового питания в набор напряжений, необходимых для работы элементов двигателя [7–9]. В стационарной работе двигателя и при переходных процессах имеют место пульсации тока потребления, вызванные особенностями рабочего процесса как в плазменном разряде двигателя, так и в СПУ [10]. Особую актуальность данный вопрос приобретает в связи с внедрением в эксплуатацию мощных двигателей, предназначенных для довыведения спутников с геопере-ходной орбиты на геостационарную [11], так как с повышением мощности потребления влияние двигательной подсистемы на параметры питания бортовой СЭП усиливается.
Поэтому при предварительном проектировании двигательной подсистемы необходимо знать электрические характеристики переходных процессов и пульсаций в цепях питания связки двигатель – СПУ как электрической нагрузки СЭП. Однако характеристики двигательной подсистемы как электрической нагрузки исследованы пока еще недостаточно. Получить расчетным методом характеристики такого рода процессов затруднительно. Теоретические исследования затруднены отсутствием моделей, адекватно описывающих поведение системы двигатель – СПУ. Поэтому наиболее распространенным и объективным методом получения информации о реальных свойствах двигательной системы является экспериментальный [12; 13]. С учетом значимости и актуальности обозначенной проблемы в АО «ИСС» были проведены испытания, которые позволили измерить характеристики переходных процессов и пульсаций при запуске, работе и отключении плазменных двигателей нескольких типов, запитываемых от соответствующих СПУ. Работы проводились на вакуумном стенде ГВУ-60. В настоящей статье приводятся результаты измерений и предварительного анализа параметров переходных процессов, полученные при огневых испытаниях двигателей разной мощности, применяемых для задач коррекции орбиты и довыведения космических аппаратов.
Объект исследований. В качестве объекта исследований в настоящей работе принимаются электрические характеристики связки двигатель – СПУ. Рассмотрены двигатели и приборы трех типов, отличающихся разной мощностью и рабочими параметрами. Потребляемая мощность связки для двигателей, которые участвовали в испытаниях, приведена в табл. 1.
Таблица 1
Потребляемая мощность сочетаний двигатель – СПУ, для которых проводились исследования электрических характеристик
|
Тип двигателя |
Общая потребляемая мощность системы (двигатель и СПУ), Вт |
|
1 |
1065 |
|
2 |
1495 |
|
3 |
5050 |
Испытательное оборудование. Исследования переходных процессов и пульсаций при работе плазменных двигателей проводились в АО «ИСС» на испытательном стенде ГВУ-60, основу которого составила вакуумная камера объемом около 80 м3. Характеристики стенда более подробно представлены в работах [14; 15]. Общий вид стенда представлен на рис. 1. Измерения проводились в процессе аттестационных и приемочных испытаний двигательных подсистем коррекции орбиты КА. При работе двигателей в вакуумной камере поддерживался безмасляный вакуум на уровне порядка 10–4 мм рт. ст. В качестве источника питания, имитирующего СЭП, использовался технологический источник. Одновременно с измерением переходных процессов и пульсаций регистрировались основные рабочие параметры двигательной подсистемы, такие как давление на выходе из блока подачи ксенона, тяга, ток и напряжение разряда, ток накала катода.

Рис. 1. Испытательный стенд ГВУ-60
Fig. 1. GVU-60 test bench
Регистрирующее оборудование. В качестве регистрирующего оборудования для исследования электрических характеристик системы двигатель – СПУ при испытаниях в АО «ИСС» применялся осциллограф TPS2024, анализаторы спектра Rohde-Schwarz FSP3 и Hewlett Packard, преобразователь тока с зондами.
Характеристики данного оборудования представлены в табл. 2.
Таблица 2
Измерительное оборудование, примененное при испытаниях
|
Наименование |
Обозначение и тип |
Пределы измерения, класс точности |
|
Осциллограф |
TektronixTPS2024 |
Диапазон измерения от 0 до 200 МГц, погрешность ±4 % |
|
Анализатор спектра |
Rohde-Schwarz FSP3 |
Диапазон измерения 20 Гц – 3 ГГц, погрешность – 0,5 дБ |
|
Анализатор спектра |
Hewlett Packard |
Диапазон измерения 20 Гц – 40,1 МГц, погрешность 1,5 дБ |
|
Преобразователь силы тока ВЧ измерительный с зондами |
ТСРА300, ТСР305, ТСР303, ТСР312 |
Диапазон измерения 0–100 МГц, погрешность ±3 % |
Технологические источники питания, схема измерений. В качестве устройства питания при проведении огневых испытаний двигателей типа 1 и 2 в АО «ИСС» применялся источник GEN 100-33-1P230 с максимальным выходным током 33 А. Для питания двигателя типа 3 применялся источник GEN-125-120-MD-3p400 с максимальным выходным током 120 А.
Схемы измерений переходных процессов и пульсаций представлены на рис. 2, 3. В качестве измерительного устройства применялись токовые зонды, которые устанавливались в электрических цепях между источником питания и СПУ. Для питания СПУ применялись технологические кабели длиной до 15 м, изготовленные по штатной технологии, применяемой для изготовления бортовых кабелей.
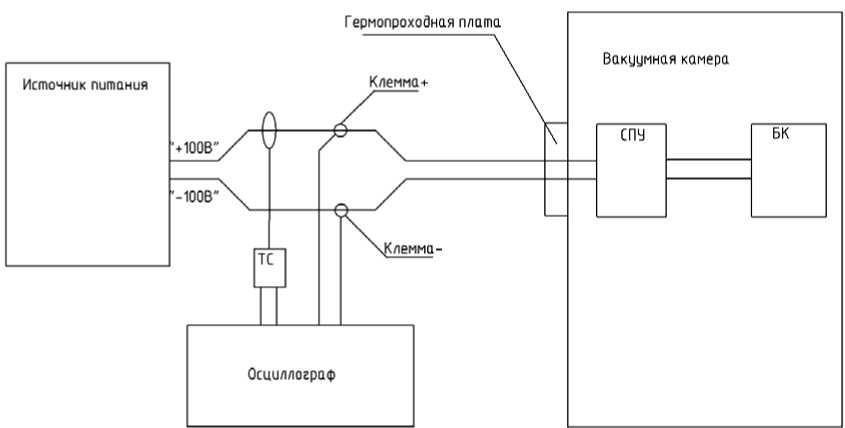
Рис. 2. Схема измерений переходных процессов двигательной подсистемы при огневых испытаниях: ТС – преобразователь силы тока ВЧ измерительный с зондами; СПУ – система преобразования и управления; БК – блок коррекции
Fig. 2. Scheme of the transient processes measurements at the firing tests: TS – High frequency measurement transducer of a current intensity with probes; PPU – Power processing unit; TU – Thruster Unit to orbit correction
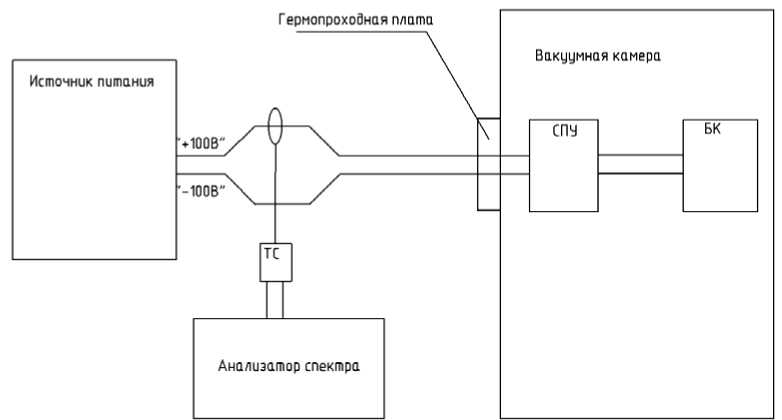
Рис. 3. Схема измерений пульсаций тока двигательной подсистемы при огневых испытаниях
Fig. 3. Scheme of the current rippling measurements at the propulsion subsystem firing tests
Методика испытаний. Испытания проводились по методике, предусматривающей включение и отключение двигателей по штатной циклограмме. Запуск двигателя, как правило, происходил по запуску источника питания анода (разрядной цепи) при прогретом катоде, термодросселе, открытых клапанах двигателя и поданном поджигном напряжении. В этой последовательности двигатель запускался в процессе роста разрядного напряжения при запуске источника питания, т. е., еще до достижения номинальной величины напряжения. Длительность работы двигателя варьировалась в диапазоне от 3 мин до 3 час. В выбранных для измерений сеансах осциллографировались ток и напряжение при включении и отключении двигателя, т. е. характеристики переходных процессов, а также регистрировались параметры (размах и частота) пульсаций как в переходных процессах, так и в стационарной работе.
Результаты измерений. Результаты измерений токов и напряжений на входе СПУ (на выходе из технологического источника питания) при включении и отключении для двигателей и СПУ трех типов представлены ниже на рис. 4–25. Для выявления характерных особенностей процессов и возможности сопоставления аналогичных параметров для двигателей различных типов параметры представлены в относительных единицах – в долях от их номинальных значений.
Переходные процессы
Запуск и отключение двигателя, тип 1
О 5 10 15 20 Т, МС
Рис. 4. Запуск, тип 1, переходный процесс по току
Fig. 4. Switch on. Type 1. Current transient process
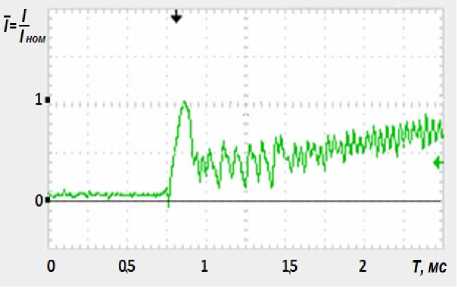
Рис. 5. Запуск, тип 1, переходный процесс по току
Fig. 5. Switch on. Type 1. Current transient process

Рис. 6. Отключение, тип 1, переходной процесс по току
Fig. 6. Switch off. Type 1. Current transient process
Запуск и отключение двигателя, тип 2
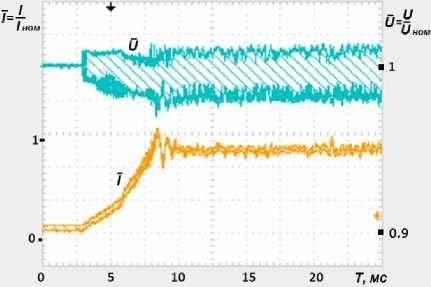
Рис. 7. Запуск, тип 2. Переходные процессы по току и напряжению
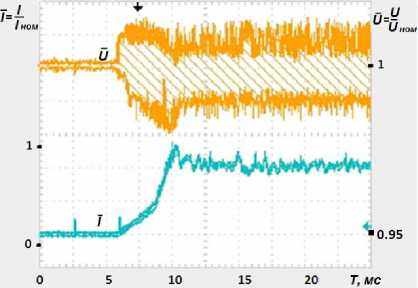
Рис. 8. Запуск, тип 2. Переходные процессы по току и напряжению
Fig. 7. Switch on. Type 2. Current and voltage transient process
Fig. 8. Switch on. Type 2. Current and voltage transient process
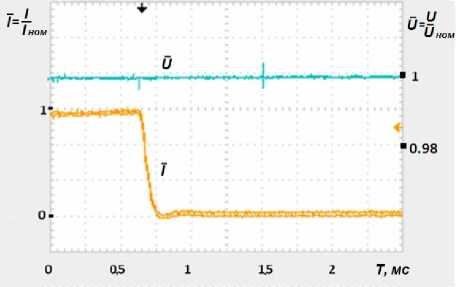
Рис. 9. Отключение, тип 2. Переходные процессы по току и напряжению
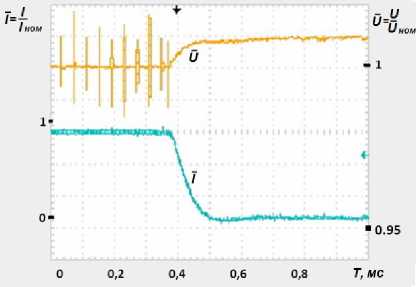
Рис. 10. Отключение, тип 2. Переходные процессы по току и напряжению
Fig. 9. Switch off. Type 2. Current and voltage transient process
Fig. 10. Switch on. Type 2. Current and voltage transient process
Запуск и отключение двигателя, тип 3
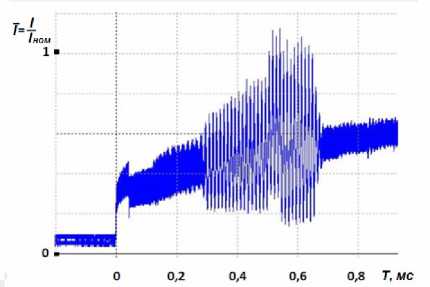
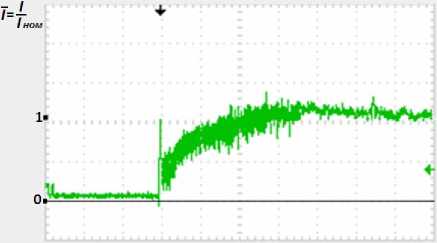
Рис. 11. Двигатель, тип 3. Ток потребления при запуске
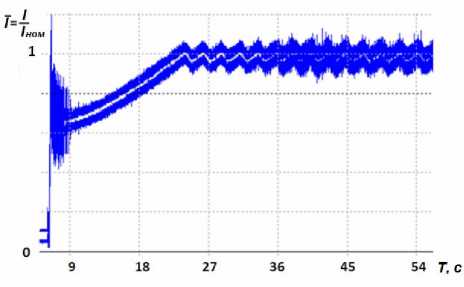
Рис. 12. Двигатель, тип 3. Ток потребления при запуске и в стационарной работе
Fig. 11. Thruster, type 3. Consume current at switch on
Fig. 12. Thruster, type 3. Consume current at switch on and stationary functioning
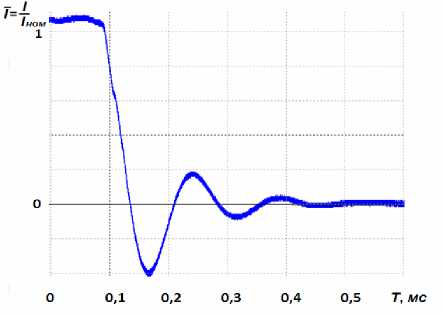
Рис. 13. Двигатель, тип 3. Ток потребления при отключении
Fig. 13. Thruster, type 3. Consume current at switch off
Пульсации
Пульсации, двигатель тип 1
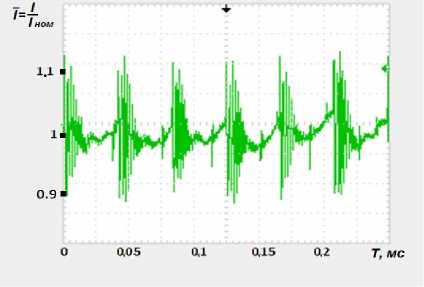
Рис. 14. Стационарная работа двигателя, тип 1. Пульсации тока. Низкая частота – 29 кГц, размах – 1,2 А
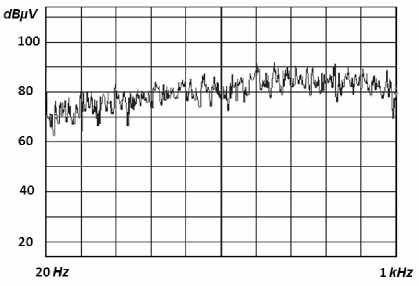
Рис. 15. Двигатель, тип 1. Спектрограмма пульсаций тока в диапазоне 20–1000 Гц
Fig. 14. Stationary functioning of thruster, type 1. Current rippling. Low frequency – 29 kH, amplitude – 1.2 A
Fig. 15. Thruster, type 1. Current rippling spectrogram in range 20–1000 H
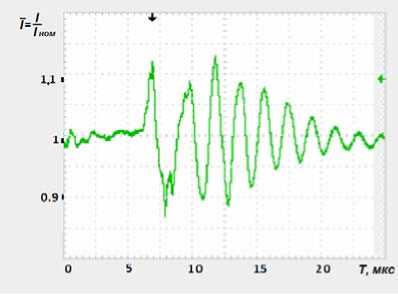
Рис. 16. Стационарная работа двигателя, тип 1. Пульсации тока. Высокая частота – 515 кГц, размах – 1,2 А
Fig. 16. Stationary functioning of thruster, type 1. Current rippling. High frequency – 515 kH,
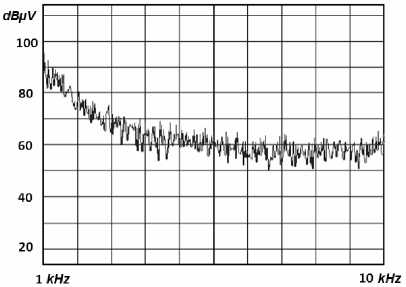
Рис. 17. Двигатель, тип 1. Спектрограмма пульсаций тока в диапазоне 1–10 кГц
Fig. 17. Thruster, type 1. Current rippling spectrogram in range 1–10 kH
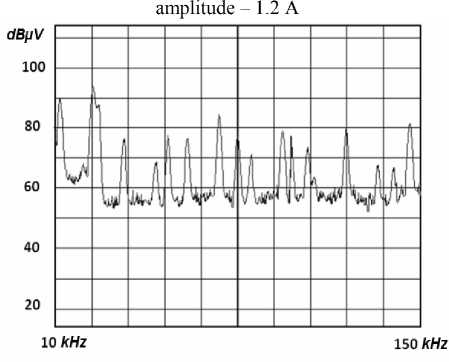
Рис. 18. Двигатель, тип 1. Спектрограмма пульсаций тока в диапазоне 10–150 кГц
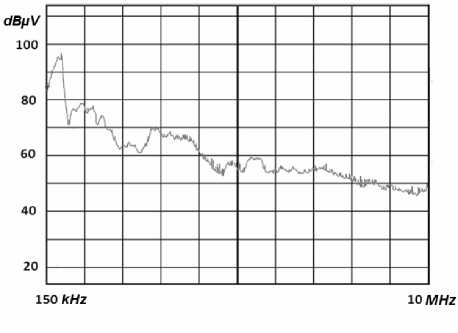
Рис. 19. Двигатель, тип 1. Спектрограмма пульсаций тока в диапазоне 150 кГц – 10 МГц
Fig. 18. Thruster, type 1. Current rippling spectrogram in range 10–150 kH
Fig. 19. Thruster, type 1. Current rippling spectrogram in range 150 kH – 10 MH
Пульсации, двигатель тип 2
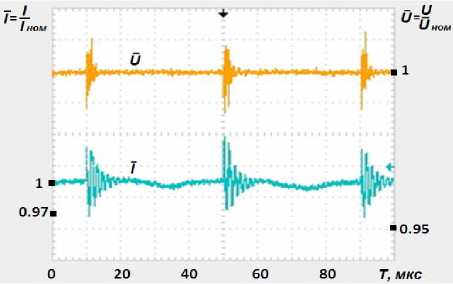
Рис. 21. Двигатель, тип 2. Стационарная работа
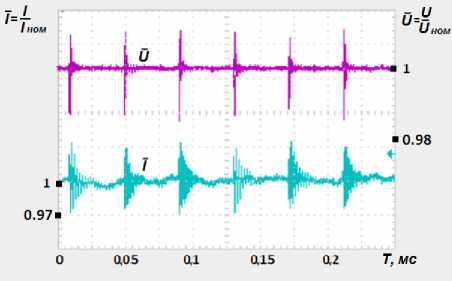
Рис. 20. Двигатель, тип 2. Стационарная работа.
Частота – 27 кГц, размах – 1,1 А
Fig. 21. Thruster, type 2. Stationary functioning
Fig. 20. Stationary functioning of thruster, type 2.
Frequency – 27 kH, amplitude – 1.1 A
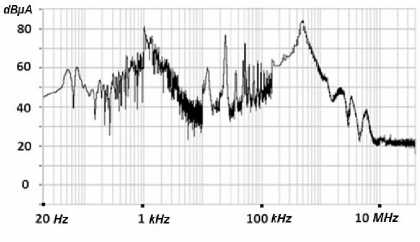
Рис. 22. Двигатель, тип 2. Спектрограмма пульсаций тока в диапазоне до 10 МГц
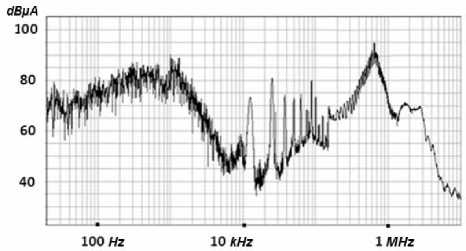
Рис. 23. Двигатель, тип 2. Спектрограмма пульсаций тока в диапазоне до 1 МГц
Fig. 22. Thruster, type 2. Current rippling spectrogram up to 10 MH
Fig. 23. Thruster, type 2. Current rippling spectrogram up to 1 MH
Пульсации, двигатель тип 3
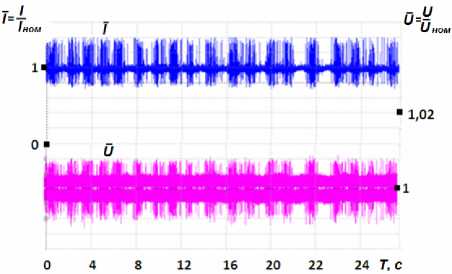
Рис. 24. Двигатель, тип 3. Пульсации в стационарной работе
Fig. 24. Thruster, type 3. Current rippling in stationary mode
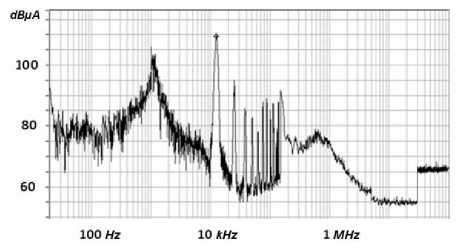
Рис. 25. Двигатель, тип 3. Спектрограмма пульсаций тока в стационарной работе в диапазоне 20 Гц – 30 МГц
Fig. 25. Thruster, type 3. Current rippling spectrogram in stationary mode in range 20 H – 30 MH
Анализ результатов измерений. По данным, представленным выше на рис. 4–25, можно оценить параметры переходных процессов при включении и отключении двигателей типа 1–3 и параметры пульсаций. Указанные параметры представлены в табл. 3.
Характеристики системы СПУ – двигатель
Таблица 3
|
Характеристики системы СПУ – двигатель |
Тип двигателя |
||
|
Переходные процессы |
1 |
2 |
3 |
|
Включение |
|||
|
Пусковой ток в долях от номинального тока потребления |
1,13 |
1,0 |
1,02 |
|
Длительность пускового тока, мс |
9 |
14 |
16000 |
|
Скорость изменения пускового тока, А/мкс |
0,1 |
0,00145 |
0,005 |
|
Отключение |
|||
|
Длительность тока отключения, мс |
1 |
0,12 |
0,35 |
|
Скорость изменения тока отключения, А/мкс |
0,04 |
0,15 |
0,92 |
|
Амплитуда обратного выброса в долях от номинального тока потребления |
– |
– |
0,412 |
|
Пульсации |
|||
|
Этап включения |
|||
|
Низкая частота, кГц |
– |
– |
0,85 |
|
Размах в долях от номинального тока потребления |
0,784 |
||
|
Высокая частота, кГц |
– |
– |
25 |
|
Размах в долях от номинального тока потребления |
0,353 |
||
|
Стационарная работа |
|||
|
Низкая частота, кГц |
29–30 |
– |
1,2 |
|
Размах в долях от номинального тока потребления |
0–113 |
0,647 |
|
|
Высокая частота, к Гц |
500 |
27 |
– |
|
Размах в долях от номинального тока потребления |
0,113 |
0,073 |
|
Анализ представленных в табл. 3 данных показывает, что свойства системы СПУ – двигатель существенно зависят от типа применяемого двигателя и СПУ. Можно отметить следующие особенности:
– пусковые токи для всех трех типов двигателей примерно равны номинальному току потребления, т. е. стартовые забросы относительно невелики;
– скорость изменения пускового тока для двигателя типа 1 максимальна (в 20–70 раз) выше, чем для двигателей 3 и 2, но, поскольку величина его незначительна, можно ожидать, что данная особенность не будет являться проблемой для системы электропитания КА;
-
– двигатели типа 1 и 2 выходят на примерно стационарный уровень тока потребления за время порядка 10 с, в то время как двигатель типа 3 – гораздо медленнее (примерно на 3 порядка);
-
– длительность тока отключения по порядку величины у двигателей всех трех типов сопоставима;
-
– скорость изменения тока при отключении максимальна у двигателя типа 3 и существенно превышает такую по сравнению с двигателями типа 1 и 2, в частности, по сравнению с двигателем типа 1 – в 23 раза;
-
– обратные выбросы тока характерны только для системы с двигателем типа 3, при этом амплитуда достигает 41 % от номинального тока потребления;
-
– при включении двигателя типа 3 имеют место низкочастотные пульсации, по-видимому, связанные с особенностями выхода данного двигателя на номинальный режим (возможно, данное явление обусловлено развитием плазменного разряда с одновременной зарядкой внутренних емкостных фильтров в СПУ). Эти пульсации имеют значительный размах, сопоставимый с номинальным током потребления – 78 % от номинального тока. Длительность данного режима составляет до 40 мс. Высокочастотные пульсации на этом режиме также имеют значительный размах – 35 % от номинального тока;
-
– в стационарной работе размах пульсаций для двигателей типа 1 и 2 относительно невелик и не превышает (10–11) % от номинального тока потребления. Для двигателя типа 3 размах низкочастотных колебаний заметно выше и составляет до 65 % от номинального тока.
Следует отметить, что все перечисленные характеристики системы двигатель – СПУ как потребителя энергии получены без применения каких-либо дополнительных фильтров и при питании от технологических источников. При запитке от штатной системы электропитания (СЭП) КА результаты могут отличаться в зависимости от построения СЭП, схемы запитки, наличия дополнительных фильтров и т. д. Поэтому полученные данные носят предварительный характер и требуют уточнения при комплексных испытаниях СЭП – СПУ – двигатель. Такого рода испытания целесообразно проводить для каждого нового типа двигателя, прибора управления и питания. Вместе с тем, несмотря на предварительный характер, полученные результаты представляют интерес при комплексном проектировании систем КА, так как дают общее представление об электрических характеристиках одного из наиболее мощных бортовых потребителей. В частности, из приведенных материалов следует, что система на базе двигателя типа 3 представляет наибольшую сложность при увязке ее с СЭП КА по причине значительной коммутируемой мощности, обратных забросов тока при отключении, существенной величины размаха пульсаций как при запуске, так и в стационарной работе, что требует поиска оптимальных схем подключения и алгоритмов управления двигательной подсистемой.
Заключение. Представлены результаты экспериментальных исследований электрических характеристик связки двигатель – СПУ для трех типов данного оборудования. Определены параметры переходных процессов при включении и отключении двигателей, а также параметры пульсаций, как в стационарной работе, так и при переходных процессах. Показано, что наибольшие сложности могут возникнуть при эксплуатации высокомощных двигателей. В частности, пусковой ток для двигателя может составлять до 100 % от номинального тока при длительности выхода на стационарный режим до 16 с. Имеется обратный выброс тока при отклю- чении двигателя данного типа. Скорость изменения тока при отключении двигателя тип 3 максимальна, размах низкочастотных пульсаций в стационарной работе составляет до 65 % от номинального тока. Полученные результаты важны при комплексном проектировании КА, в частности – при согласовании параметров системы электропитания и системы коррекции. Отмечена целесообразность комплексных испытаний СЭП – СПУ – двигатель для каждого нового типа двигателей, приборов управления и питания.
Список литературы Экспериментальные исследования характеристик плазменных двигателей и приборов преобразования и управления как электрической нагрузки системы электропитания космического аппарата
- The Technological and Commercial Expansion of Electric Propulsion in the Past 24 Years / D. Lev, R. V. Myers, K. M. Lemmer et al. // 35th Electric Propulsion Conference. IEPC-2017-242. Georgia Institute of Technology. USA, October 8-12, 2017.
- Development of KM-60 Based Orbit Control Propulsion Subsystem for Geostationary Satellite / V. V. Vorontsov, A. N. Kostin, A. S. Lovtsov et al. // Procedia Engineering. 2017. Vol. 185. P. 319325.
- EP System Development and Functional Validation Tests for Electra GEO Satellite / V. Garcia, E. Lamoureux, B. Andersson et al. // 36th International Electric Propulsion Conference. IEPC-2019-A288. Vienna, Austria. September 15-20, 2019. 14 p.
- Ермошкин Ю. М., Якимов Е. Н. О концепции «полностью электрического космического аппарата» // Сибирский журнал науки и технологий. 2018. Т. 19, № 3. С. 489-496. Doi: 10.31772/2587-6066-2018-19-3-489-496.
- Design of a multifunctional electric propulsion subsystem of the spacecraft / Yu. M. Ermo-shkin, Yu. V. Kochev, D. V. Volkov et al. // Siberian journal of science and technology. 2020. Vol. 21, No. 2. P. 233-243. Doi: 10.31772/2587-6066-2020-21-2-233-243.
- Согласование электрических интерфейсов системы электропитания и системы коррекции довыведения / П. А. Крючков, Ю. М. Ермошкин, А. В. Вавилов и др. // Электронные и электромеханические системы и устройства : тез. докладов ХХ науч.-техн. конф. Томск, 2020. С. 52-54.
- Современное состояние и перспективы развития систем преобразования и управления электрореактивными плазменными двигателями / В. Н. Гладущенко, В. Н. Галайко, К. Г. Гордеев и др. // Электронные и электромеханические системы и устройства : сб. науч. тр. Томск : АО НПЦ «Полюс» ; Изд. Томского политех. ун-та, 2016. С. 59-65.
- Power Processing Unit activities at Thales Alenia Space in Belgium / Eric Bourguignon, Stéphane Fraselle // Space prop. Conf., 2018. Seville, Spain, 14-18 May 2018. 8 p.
- High Voltage Power Supply for T5 Gridded Ion Thruster / A. Mallmann, F. Forrisi, E. Mache et al. // 36th International Electric Propulsion Conference, IEPC-2019-A512. Vienna, Austria, September 15-20, 2019. 7 p.
- Особенности переходных процессов в разрядной цепи при запуске стационарного плазменного двигателя СПД-140Д / Ю. М. Ермошкин, В. Н. Галайко, В. П. Ким и др. // Вестник Моск. авиац. ин-та. 2017. Т. 24, № 4. С. 80-88.
- Ермошкин Ю. М., Якимов Е. Н. О концепциях применения двигателей коррекции и довыведения // Авиация и космонавтика - 2017 : тез. доклада 16-й Междунар. конф. Москва, МАИ, 20-24 ноября 2017 г. С. 92-93.
- Новые технические решения, применяемые при наземной экспериментальной отработке электрореактивной системы довыведения и коррекции орбиты КА / Ю. В. Кочев, Ю. М. Ермош-кин, Д. В. Меркурьев и др. // Актуальные вопросы проектирования автоматических космических аппаратов для фундаментальных и прикладных научных исследований. 2017. Вып. 2. С.300-306.
- Determination of Electromagnetic Emission from Electric Propulsion Thrusters under Ground Conditions / S. V. Baranov, A. P. Plokhikh, G. A. Popov et al. // 35th International Electric Propulsion Conference. IEPC-2017-167. Georgia Institute of Technology. USA, Oct. 8.-12, 2017. 8 p.
- Стенд огневых испытаний плазменных двигателей в АО «ИСС» / А. В. Никипелов, Р. С. Симанов, Ю. М. Ермошкин и др. // Наукоемкие технологии. 2016. Т. 17, № 8. С. 61-65.
- 13 kW advanced electric propulsion flight system development and qualification / J. Jackson, S. Miller, J. Cassidy et al. // 36th International Electric Propulsion Conference, IEPC-2019-A692. Vienna, Austria, September 15-20, 2019. 19 p.
