Экспериментальные исследования макета радиолокационной станции вертикального зондирования

Автор: Владимиров В.М., Дмитриев Д.Д., Ратушняк В.Н., Колупаев А.Ю.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 7 т.15, 2022 года.
Бесплатный доступ
Одной из проблем современных радиотехнических войск страны является невозможность обнаружения маловысотных малоразмерных воздушных объектов над позицией радиотехнического подразделения, что обусловлено наличием мертвой воронки зон обнаружения обзорных РЛС. Решением данной проблемы может быть применение мобильных малогабаритных РЛС вертикального зондирования. В статье приведены состав и структура макета РЛС ВЗ с малоэлементной антенной решеткой, а также результаты его экспериментальных исследований. В ходе проведения экспериментов было исследовано влияние структуры зондирующего сигнала на качество получаемой информации. В качестве зондирующих сигналов были использованы обыкновенные радиоимпульсы, 7- и 13-разрядные коды Баркера с изменением несущей частоты от 48 до 55 МГц, длительности сигнала от 1 до 10 мкс и периода повторения от 10 до 300 мкс. Анализ результатов обработки выборок отраженных сигналов по дальности показал реальные мощные отражения сигнала от подстилающей поверхности и приземного облачного слоя, а также небольшие по мощности отражения от неоднородностей атмосферы и воздушных объектов, которые и представляют научный интерес. В процессе натурных испытаний был обнаружен трассовый самолет, измерены его текущие координаты, составлен радиолокационный портрет воздушного судна. Результаты экспериментальных исследований позволили сделать вывод о перспективности применения РЛС ВЗ для обнаружения маловысотных малоразмерных воздушных объектов и исследования атмосферы. Макет РЛС ВЗ показал свою работоспособность и имеет большой технический потенциал по дальнейшему улучшению характеристик.
Радиолокационная станция вертикального зондирования, малоэлементные антенные решетки, атмосферные неоднородности, малоразмерные воздушные объекты, обработка сигналов, зона обнаружения, мертвая воронка зоны обнаружения
Короткий адрес: https://sciup.org/146282512
IDR: 146282512 | УДК: 621.371.31 | DOI: 10.17516/1999-494X-0442
Experimental investigations of the vertical sounding radar layout
One of the problems of modern radio engineering troops is the impossibility of detecting low- altitude small-sized air objects over the position of a radio engineering unit. This is due to the presence of a dead funnel of surveillance radar detection zones. The solution to this problem can be the use of mobile small-sized vertical sounding radars. The article presents the composition and structure of a model of a vertical sounding radar station with a low-element antenna array, as well as the results of its experimental studies. In the course of the experiments, the influence of the structure of the probing signal on the quality of the information received was studied. Ordinary radio pulses, 7- and 13-bit Barker codes with a change in carrier frequency from 48 to 55 MHz, signal duration from 1 to 10 µs, and repetition period from 10 to 300 µs were used as probing signals. An analysis of the results of processing samples of reflected signals by range showed real powerful signal reflections from the underlying surface and the surface cloud layer, as well as small reflections from atmospheric inhomogeneities and air objects, which are of scientific interest. In the process of full-scale tests, a highway aircraft was found, its current coordinates were measured, and a radar portrait of the aircraft was compiled. The results of experimental studies allowed us to conclude that the use of vertical sounding radar stations for detecting low-altitude small-sized air objects and studying the atmosphere is promising. The model of the vertical sounding radar has shown its efficiency and has a great technical potential for further improvement of performance.
Текст научной статьи Экспериментальные исследования макета радиолокационной станции вертикального зондирования
Цитирование: Владимиров В. М. Экспериментальные исследования макета радиолокационной станции вертикального зондирования / В. М. Владимиров, Д. Д. Дмитриев, В. Н. Ратушняк, А. Ю. Колупаев // Журн. Сиб. федер. ун-та. Техника и технологии, 2022, 15(7). С. 874–884. DOI: 10.17516/1999-494X-0442
включая малоразмерные и маловысотные, во всем диапазоне высот их полета на максимально возможной дальности с заданной вероятностью, определение характеристик целей, их координат, параметров движения, тактических характеристик и государственной принадлежности.
Радиолокационное поле формируется за счет совокупности зон обнаружения (ЗО) отдельных РЛС кругового или секторного обзора. ЗО характеризуется минимальным ε min и максимальным ε max углами места, максимальными высотой ( H max ) и дальностью (Д max ) обнаружения цели, радиусом мертвой воронки ( R МВ) (рис. 1) [1]. Наличие мертвой воронки зоны обнаружения РЛС, размер которой, как правило, больше, чем высота полета цели ( H ц), обуславливает потенциальную невозможность обнаружения малоразмерных маловысотных целей, в том числе беспилотных летательных аппаратов. А исключение мертвых воронок ЗО практически невозможно без значительного усложнения конструкции антенных систем РЛС.
Одним из способов решения данной проблемы является применение мобильной малогабаритной РЛС вертикального зондирования (РЛС ВЗ), которая своей ЗО перекрывает мертвые воронки ЗО основных РЛС и в сопряжении с ними формирует сплошное радиолокационное поле. Временная задержка отраженного сигнала, угол наклона диаграммы направленности от вертикальной оси и сдвиг по частоте, обусловленный эффектом Доплера, дают точную информацию о наклонной дальности, высоте и скорости перемещения радиолокационных объектов. Анализ параметров отраженных сигналов позволяет получать в реальном масштабе времени радиолокационную информацию, а физические принципы, положенные в основу функционирования этих станций, позволяют проводить непрерывные радиолокационные измерения независимо от погодных условий [2–5].
Кроме того, РЛС ВЗ – относительно новый вид аппаратуры и может использоваться не только для обнаружения радиолокационных целей, но и для целей разведки погодных условий и исследования неоднородностей атмосферы. РЛС ВЗ предназначены для обнаружения
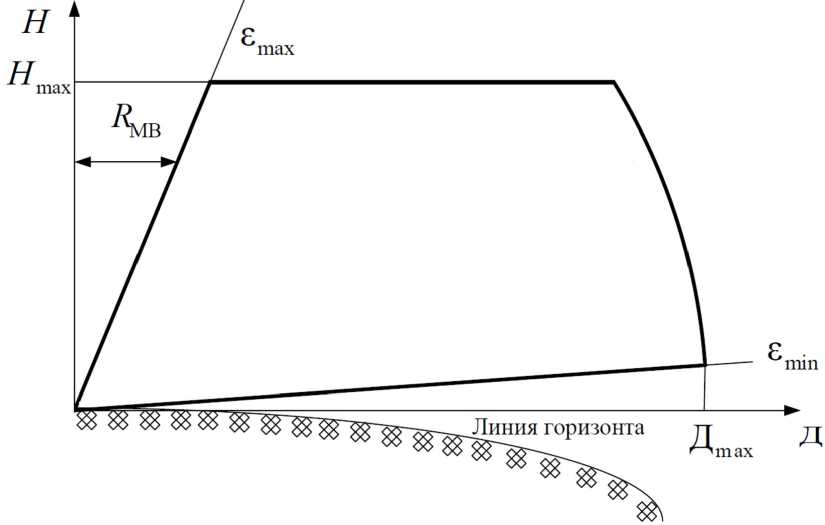
Рис. 1. Сечение зоны обнаружения обзорной РЛС вертикальной плоскостью
Fig. 1. Cross section of the detection zone of the radar layout with a vertical plane и определения параметров движения радиолокационных целей, скорости ветра над точкой зондирования в тропосфере.
Однако подавляющее большинство РЛС ВЗ - достаточно крупные объекты с антенными полями площадью более 10000 м2. Подобные РЛС ВЗ используются в научно-исследовательских целях при изучении атмосферы и для массового применения малопригодны. А разработка мобильных малогабаритных РЛС ВЗ с малоэлементной антенной решеткой требует решения серьезных проблем, связанных прежде всего с уменьшением энергетического потенциала из-за общего снижения отношения сигнал/шум на входе приемника за счет малой апертуры антенны и небольшой импульсной мощности зондирующего сигнала. Указанное обстоятельство не позволяет применять стандартные алгоритмы подавления отражений от местных предметов и выделения на их фоне полезных сигналов. В подобных условиях наиболее перспективными методами будут являться адаптивная компенсация мешающих сигналов с использованием че-респериодных автокомпенсаторов или, с учетом достаточно низкой динамики принимаемых сигналов, составление «карты местных предметов». Перспективным подходом в обработке сигналов с низким отношением сигнал/шум в приложении к РЛС ВЗ является применение специальных зондирующих сигналов. Одним из вариантов таких сигналов являются смычки сложных шумоподобных сигналов (коды Баркера, М-последовательности) для компенсации боковых лепестков автокорреляционной функции при их последующей обработке.
1. Структура макета РЛС ВЗ
Архитектура новых РЛС ВЗ должна обеспечивать реализацию эволюционного развития и модульности конструкции, взаимозаменяемости компонентов, а также переход к программноаппаратной реализации основных устройств (узлов). При проектировании мобильных малогабаритных РЛС ВЗ с малоэлементной антенной решеткой должны выполняться следующие основные требования:
-
– обеспечение заданной дальности;
-
- улучшение характеристик разрешения и повышения точности координат и скорости отражений от радиолокационных объектов;
-
– повышение помехоустойчивости;
-
– уменьшение потребляемой мощности;
-
– уменьшение массогабаритных параметров;
-
– обеспечение высокой мобильности РЛС.
Исследование потенциальных возможностей РЛС ВЗ и методов, применяемых для обнаружения и сопровождения воздушных объектов в подобных РЛС, наиболее эффективно при помощи натурного макета. Для решения этих задач макет РЛС ВЗ должен иметь следующие возможности:
-
1) формирование сетки рабочих частот в диапазоне 40–60 МГц с шагом 200 Гц;
-
2) формирование на выходе задающего генератора различных радиоимпульсов с длительностью от 1 до 50 мкс, периодом следования от 10 мкс до 60 мс:
-
– прямоугольный одиночный радиоимпульс;
-
– одиночный радиоимпульс с гауссовской формой огибающей;
-
– одиночный радиоимпульс с модифицированной гауссовской формой огибающей;
-
– пакет радиоимпульс в виде дополнительного кода;
-
– пакет радиоимпульс с различной модуляцией (AM, FM, PM, PSK, QAM);
-
3) усилитель мощности должен обеспечивать неискаженное усиление радиоимпульсов, поступающих с выхода возбудителя;
-
4) выходная мощность в импульсе – не менее 1 кВт, средняя мощность определяется параметрами радиоимпульсов на входе;
-
5) коэффициент стоячей волны нагрузки на выходе усилителя мощности – менее 2,5;
-
6) возможность электронного сканирования пространства.
Кроме того, для осуществления оптимальной обработки отраженных эхо-сигналов в условиях мощных отражений от подстилающей поверхности и измерения радиальной составляющей скорости радиолокационных объектов макет РЛС ВЗ должен строиться только с истинной внутренней когерентностью, для чего необходимо применять меры по выравниванию задержек в трактах антенной решетки.
В состав макета РЛС ВЗ входит (рис. 2):
-
1) антенная система, состоящая из 4-х антенн типа волновой канал (антенн Яги), согласующих антенных трансформаторов, дуплексеров и комплекта ВЧ-кабелей;
-
2) формирователь зондирующих сигналов на основе векторного генератора произвольных зондирующих сигналов PXI KEYSIGHT M9383A;
-
3) предварительный усилитель 100 Вт;
-
4) два усилителя мощности (ПМ-2) по 500 Вт каждый;
-
5) приемное устройство на основе модулей PXI National Instruments NI:
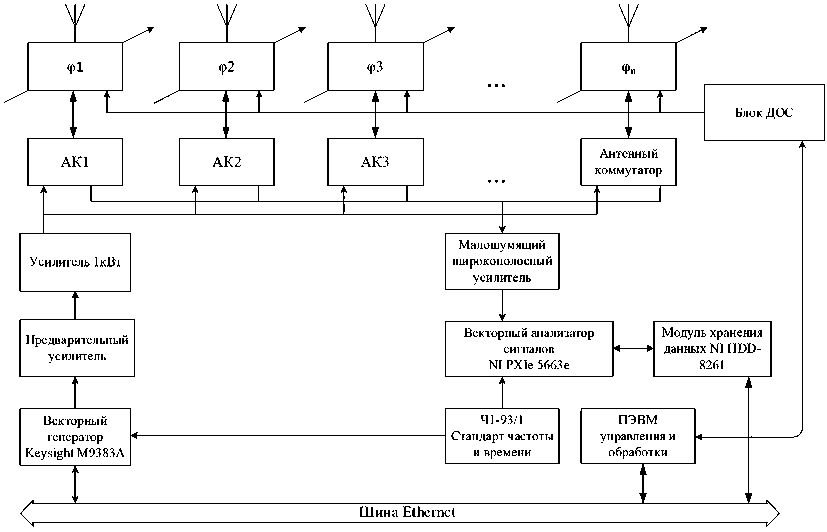
Рис. 2. Обобщенная структурная схема макета РЛС ВЗ
Fig. 2. Generalized block diagram of the VZ radar layout
– ПЛИС NI PXIe-7976R (Xilinx K710T);
– векторный анализатор сигналов PXIe-5663E;
– модуль для хранения данных NI HDD-8261;
– контроллер вычислительный NI PXIe-8840).
6) устройство синхронизации на основе стандарта частоты и времени рубидиевого Ч1–93/1.
7) ПЭВМ для управления работой РЛС ВЗ и для обработки принимаемых данных;
8) дополнительное оборудование (комплект измерительных приборов, используемый для настройки, тестирования и контроля параметров аппаратуры кластера, система бесперебойного питания аппаратуры РЛС).
2. Экспериментальные исследования
В результате проделанной работы аппаратура макета РЛС ВЗ была доведена до этапа натурных испытаний, в процессе которых был получен большой объем данных с записью реальных эхо-сигналов от радиолокационных воздушных объектов, с удалением от 0,5 км до 6–7 км на испытательном полигоне.
Целью проведения натурных экспериментальных исследований является оценка работоспособности основных систем РЛС ВЗ, оценка достижимых характеристик обнаружения, измерения наклонной дальности, скорости радиолокационных целей и неоднородностей атмосферы с использованием разработанных методов формирования зондирующих сигналов, обработки радиолокационных сигналов с низким отношением сигнал/шум на фоне отражений от местных предметов, управления угловым положением главного лепестка диаграммы направленности в малоэлементных антенных решетках.
Экспериментальные исследования проводились в нормальных климатических условиях:
– температура окружающего воздуха, °C5–15
– относительная влажность воздуха,%53
– атмосферное давление, мм рт. ст.762
Основными этапами при проведении экспериментальных исследований являлись:
-
– проведение непрерывных измерений помеховой обстановки в точке расположения антенн макета РЛС ВЗ;
-
– работа макета РЛС ВЗ в приемо-передающем режиме с различными параметрами зондирующего сигнала и его кодовой структуры, с записью данных в модуль для хранения данных NI HDD-8261 и его последующей постобработки в среде Matlab;
-
– экспресс-анализ полученных данных и корректировка режимов работы аппаратуры и условий эксперимента;
-
– проведение регулировок и доработки аппаратуры по результатам экспресс-анализа данных.
На рис. 3 и 4 представлены обзорные спектры радиосигналов, иллюстрирующие помеховую обстановку при проведении эксперимента. Средний уровень шумов в полосе частот от 30 МГц до 70 МГц составляет минус 90 дБм/Гц. Спектр получен на штыревую изотропную антенну переносным анализатором спектра Agilent N 9914A.
Для повышения чувствительности и подавления помех использовался режим когерентного накопления сигналов. В настоящее время режим накопления осуществляется программным – 879 –
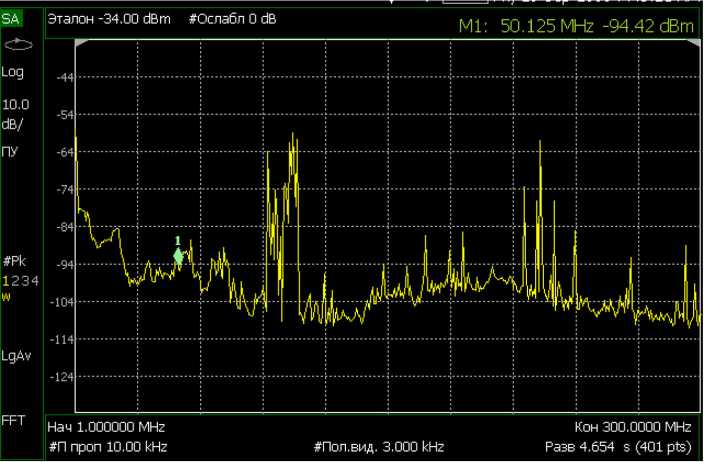
Рис. 3. Спектр помеховой обстановки в диапазоне 1–300 МГц
Fig. 3. Spectrum of the interference situation in the range 1–300 MHz
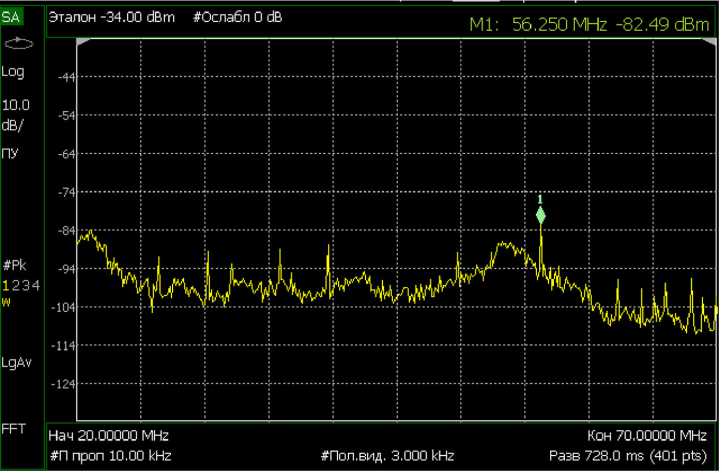
Рис. 4. Спектр помеховой обстановки в диапазоне 20–70 МГц
Fig. 4. Spectrum of the interference situation in the range of 20–70 MHz способом при анализе файлов, записанных в массив данных. В натурных испытаниях производилась генерация зондирующих сигналов в виде обыкновенных радиоимпульсов, 7- и 13-раз-рядных кодов Баркера с изменением несущей частоты от 48 до 55 МГц, длительности сигнала от 1 до 10 мкс и периода повторения от 10 до 300 мкс.
Программа осуществляет преобразование входного сигнала к комплексной огибающей, низкочастотную фильтрацию, понижение частоты дискретизации, согласованную фильтра-– 880 – цию сигнала и накопление сигнала по выборкам периодов повторения импульсов зондирующего сигнала [5].
На рис. 5 и 6 представлены выборки огибающих отраженных зондирующих сигналов (13-разрядный код Баркера с длительностью 13 мкс) с максимальной дальностью 900 декаметров. На рисунках хорошо просматриваются отражения от приземного облачного слоя на высотах 3 и 7 км. Особый интерес на рисунках представляют небольшие амплитудные колебания отраженных сигналов, которые были вызваны возмущениями атмосферы. К сожалению, однозначную идентификацию принятых эхо-сигналов с привязкой их к конкретным атмосферным образованиям или слоям достаточно сложно провести, так как для такой оценки и анализа статистической повторяемости характеристик сигналов длительных интервалов наблюдений измерения необходимо проводить на продолжительных интервалах времени.
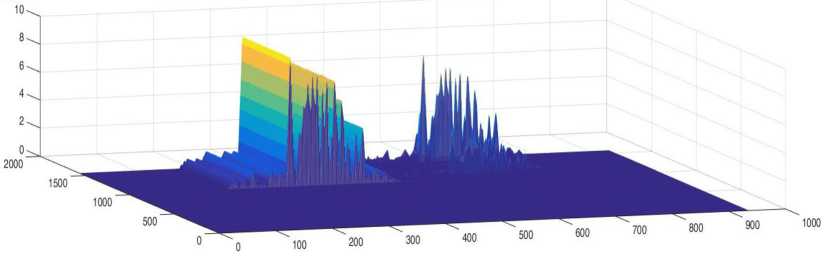
Рис. 5. Выборки огибающих отраженных зондирующих сигналов (1500 периодов повторения)
Fig. 5. Samples of envelopes of reflected probing signals (1500 repetition periods)
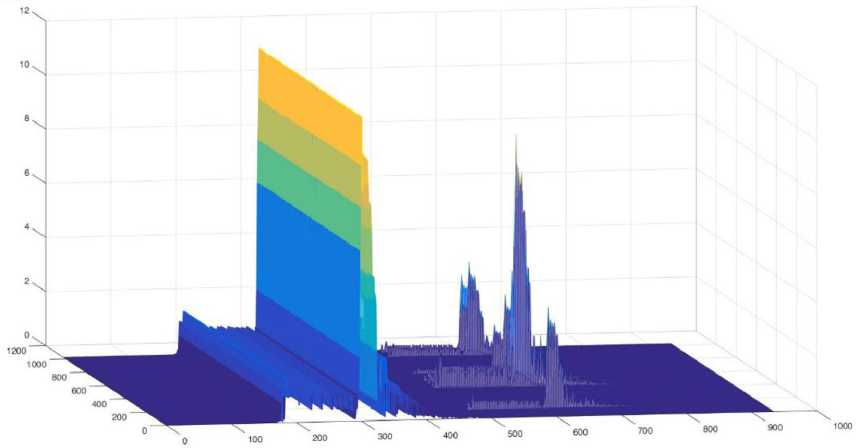
Рис. 6. Выборки огибающих отраженных зондирующих сигналов (1000 периодов повторения)
Fig. 6. Samples of envelopes of reflected probing signals (1000 repetition periods)
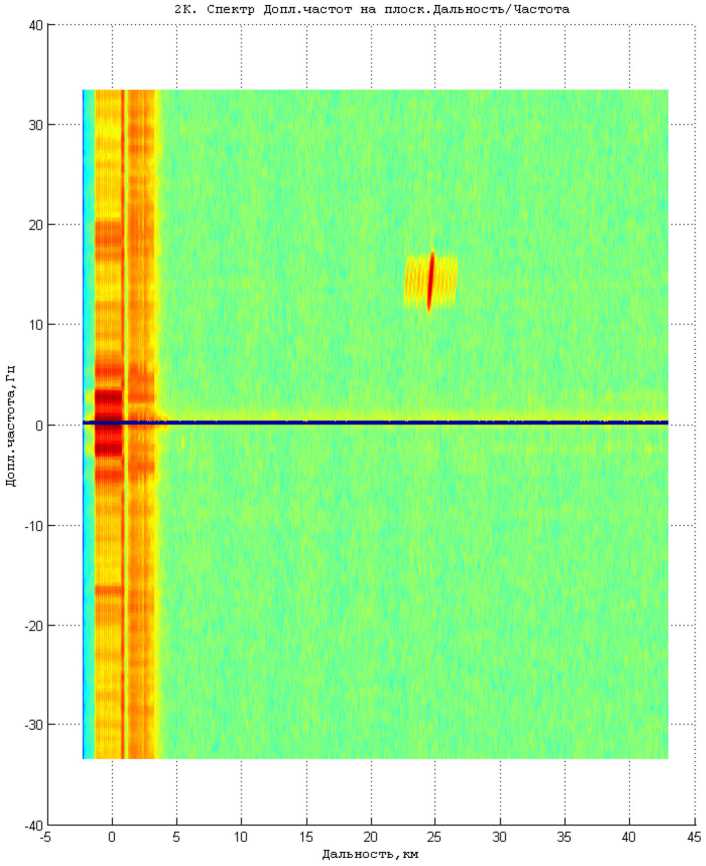
Рис. 7. Отражение зондирующего сигнала от трассового самолета
Fig. 7. The reflected probing signal from the track plane
На рис. 7 показано отражение зондирующего сигнала от трассового самолета, находящегося на наклонной дальности 25 км. На спектрограмме хорошо просматривается радиолокационный портрет воздушного судна и измеренная частота Доплера.
Таким образом, натурные испытания макета РЛС ВЗ проведены успешно и показали работоспособность аппаратуры макета. Получен большой массив данных отраженных сигналов, написан код программы в среде Matlab для его постобработки. Результаты экспериментальных испытаний представлены в виде накопленных во времени выборок осциллограмм отраженных сигналов.
3. Анализ полученных результатов экспериментальных исследований РЛС ВЗ
В результате натурных испытаний макета РЛС ВЗ был получен большой объем данных с записью реальных отраженных от радиолокационных целей и неоднородностей атмосферы зондирующих сигналов. Монтаж составных частей аппаратуры макета РЛС ВЗ позволил отладить работу всей аппаратуры и сопутствующего программного обеспечения в условиях реальных помеховой обстановки и эхо-сигналов. При такой отладке возникали и решались проблемы, явно невидимые или недооцененные на начальном этапе проектирования аппаратуры. Кроме того, условия отладки аппаратуры и подсистем макета РЛС ВЗ на позиции были недостаточно благоприятны для его работы, что связано с большим уровнем помех в рабочем диапазоне частот.
В настоящее время по полученным и накопленным эхо-сигналам однозначная идентификация радиолокационных портретов воздушных целей и атмосферных неоднородностей принятых эхо-сигналов с привязкой их к конкретным воздушным объектам и атмосферным образованиям в системе с 4-мя антенными элементами не вызывает больших трудностей. Поэтому работоспособность макета РЛС ВЗ можно оценить по устойчивости принимаемых радиолокационных сигналов на сравнительно коротких интервалах времени и наблюдений.
Проведенные натурные испытания макета РЛС ВЗ показали возможность его использования как для обнаружения воздушных целей, так и для исследования атмосферы. Получены реальные выборки отраженных зондирующих сигналов нескольких типов: обыкновенных радиоимпульсов, 7- и 13-разрядных кодов Баркера с частотой от 48 до 55 МГц, различной длительности сигнала от 1 до 10 мкс и периодом повторения от 10 до 300 мкс. Использование сигналов с кодом Баркера, по сравнению с простым радиоимпульсом, позволяет обнаруживать более слабые отраженные сигналы и производить компенсацию мешающих сигналов от подстилающей поверхности с большим коэффициентом подавления.
Анализ результатов обработки выборок осциллограмм отраженных сигналов по дальности показал реальные мощные отражения сигнала от подстилающей поверхности и отражения от приземного облачного слоя, а также небольшие по мощности отражения от неоднородностей атмосферы и воздушных объектов, которые и представляют научный интерес. В процессе натурных испытаний был обнаружен трассовый самолет, измерены его текущие координаты, составлен радиолокационный портрет воздушного судна. Особо хочется отметить получение результата возмущения атмосферы и распространения акустической волны от грозового разряда, что подтверждает многоцелевое назначение макета РЛС ВЗ и наглядно отображает Френелевское и Брэгговское отражение электромагнитных волн на границе сред с разной плотностью атмосферы.
По результатам проведения экспериментальных исследований можно сделать вывод о перспективности применения РЛС ВЗ для обнаружения маловысотных малоразмерных воздушных объектов и исследования атмосферы. Макет РЛС ВЗ показал свою работоспособность и имеет большой технический потенциал по дальнейшему улучшению характеристик. Крайне важным следующим шагом в развитии макета РЛС ВЗ является реализация как минимум 12-элементной антенной решетки с соответствующей диаграммообразующей схемой для электронного сканирования атмосферы.
Список литературы Экспериментальные исследования макета радиолокационной станции вертикального зондирования
- Основы построения радиолокационных станций радиотехнических войск. В. Н. Тяпкин, А. Н. Фомин, Е. Н. Гарин и; под общ. ред. В. Н. Тяпкина.- 2-е изд., перераб. М.: Инфра-М. 2022. 536.
- Владимиров В. М., Ратушняк В.Н, Вяхирев В. А., Тяпкин И. В. Особенности сканирования атмосферы и построения радиолокационных станций вертикального зондирования с малоэлементной антенной решеткой. Космические аппараты и технологии, 2019. 3(4). 237-242.
- Dmitriev D. D., Ratushniak V. N., Vladimirov V. M., Fateev Y. L. Methods for Radar Atmospheric Sensing Using Radars with Low-Element Antenna Arrays. Moscow Workshop on Electronic and Networking Technologies, MWENT 2020.
- Гарин Е. Н., Ратушняк В. Н., Гладышев А. В., Смирнов Д. И. Программное и аппаратное моделирование радиолокационных сигналов РЛС вертикального зондирования. Журнал Сибирского федерального университета. Техника и технологии. 2020. 13(3). 370-378.
- Dmitriev, D.D., Ratushnyak V. N., Gladyshev A. B.,. Synthesis of Directivity Pattern for Various Antenna Arrays Configurations of Vertical Atmospheric Sensing Radar Station. SIBCON 2021, International Siberian Conference on Control and Communications. 10.1109/SIBCON 50419.2021.9438940.
- Свидетельство № 2021663026 Российская Федерация. Компьютерная модель обработки отраженных зондирующих сигналов РЛС вертикального зондирования атмосферы. В. Н. Тяпкин, Колупаев А. Ю., Н. С. Кремез,; заявитель и правообладатель ФГАОУ ВО "Сибирский федеральный университет". № 2021662145 заявл. 30.07.2021; зарегистр. 11.08.2021.
