Экспериментальные исследования управляемого движения робота с внешними актуаторами для мониторинга трубопроводов малого диаметра

Автор: Савин Сергей Игоревич, Яцун Сергей Федорович, Рублв Сергей Борисович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Современные технологии в промышленности, строительстве и на транспорте
Статья в выпуске: 4-5 т.14, 2012 года.
Бесплатный доступ
В статье описаны экспериментальные исследования работы робота для перемещения по трубопроводам с помощью специализированного стенда. В статье приведены описания использованных методов исследования, полученные результаты.
Робот, трубопровод, лабораторный стенд, электропривод
Короткий адрес: https://sciup.org/148201377
IDR: 148201377 | УДК: 629
Experimental researches of operated movement at robot with external actuators for monitoring the small diameter pipelines
In article the experimental researches of operation of the robot for moving on pipelines by means of the specialized stand are described. Descriptions of the used methods of the research, the received results are provided in article.
Текст научной статьи Экспериментальные исследования управляемого движения робота с внешними актуаторами для мониторинга трубопроводов малого диаметра
Использование робототехнических средств для проведения мониторинга состояния внутренней поверхности трубопроводов в настоящее время получает все большее распространение. Существует значительное количество научных работ, посвященных проектированию роботов, способных перемещаться по трубопроводам. Значительное внимание уделяется роботам, способным адаптироваться под изменяющийся диаметр трубопровода [1-3]. Для решения задач адаптации робота к меняющемуся диаметру трубопровода предлагается использовать одномодульные конструкции со специальным кинематическими схемами [1-2] или многомодульные конструкции [3]. Также следует отметить работы, рассматривающие многомодульные конструкции роботов для перемещения по трубопроводам, с точки зрении их способности преодолевать сложные повороты [3-4]. В работе [5] особо отмечаются проблемы, связанные с перемещением мобильных роботов внутри труб малого диаметра на значительные расстояния. Авторы указывают на необходимость использовать внешний источник энергии, способный обеспечить роботу возможность развивать достаточную скорость. В работе [5] предлагается использовать пневматический привод с компрессором находящимся вне трубы.
Таким образом, к важным проблемам, связанным с проектированием роботов для перемещения внутри трубопроводов, следует отнести обеспечение адаптации робота к меняющемуся диаметру трубы, проблему преодоления сложных поворотов и проблему перемещения робота
на значительные расстояния. С учётом мирового опыта проектирования роботов для перемещения по трубопроводам было разработано устройство, способное перемещаться на значительные расстояния по трубам переменного диаметра, преодолевая сложные повороты. Устройство является двухмодульным роботом с внешним источником энергии.
Рис. 1. Внедряемая часть робота с тремя тросами, предусматривающая реверсивное движение:
1, 2, 3, 4 – первый, второй, третий и четвёртый блок соответственно; 5 – контактные элементы; 6 – трос; 7, 8, 9
– оболочки тросов
Описание конструкции робота. Робот состоит из внедряемой и приводной (стационарной) частей. Приводная часть включает в себя три приводных модуля. Внедряемая часть робота состоит из двух секций. Каждая секция состоит из двух корпусных и шести контактных элементов, соединённых между собой рычагами, образующими параллельный рычажный механизм. Каждая секция робота приводится в движение приводным модулем. На рис. 1 представлено изображение внедряемой части робота. Модель предназначена для перемещения по прямым трубам. Для придания устройству возможности преодолевать повороты в конструкцию робота были добавлены три дополнительных троса для придания роботу возможности совершать управляемый поворот. Полученная конструкция показана на рис. 2.
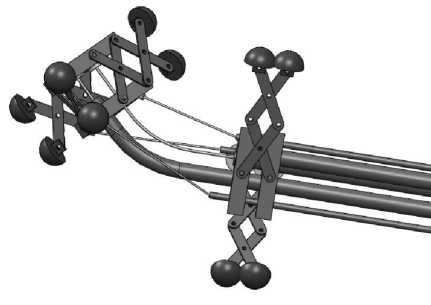
Рис. 2. Внедряемая часть робота с управляемого системой поворота
Движение осуществляется следующим образом. До начала движения робот помещается в полость. Приводная часть робота прикладывает усилия к тросам и их оболочкам, заставляя их совершать относительные перемещения. Под действием этих перемещений передний и задний модули робота изменяют свою форму, сжимаясь или расширяясь, прижимая контактные элементы к стенкам полости, по которой происходит перемещение. Сначала усилия прикладываются таким образом, чтобы задний модуль оказался зафиксирован в полости. После этого передний модуль проталкивается одним из тросов вперёд. В связи с тем, что задний модуль зафиксирован, он не может двигаться назад. Далее задний модуль сжимается, а передний расширяется, оказываясь зафиксированным. После этого приводная часть робот прикладывает к тросу и оболочке троса, которые соединяют передний и задний модули, усилие, заставляющие оболочку троса двигаться в поступательном направлении относительно троса. В связи с тем, что передний модуль зафиксирован, он не может двигаться назад и под действием приложенной силы задний модуль осуществляет поступательное движение. Указанные действия повторяются в цикле. Для осуществления реверса эти действия производятся в обратном порядке.
Описание процесса проведения экспериментов. Для проведения эксперимента был спроектирован и собран специальный стенд. Стенд включает в себя три линейных электропривода с винтовой передачей мощностью 60 Вт, исполнительный орган каждого из которых снабжен средством для закрепления гибкого троса. Оболочки гибких тросов закрепляются на корпусе стенда. В состав стенда также входит блок управления, позволяющий независимо управлять каждым линейным электроприводом. Для проведения испытаний используются макеты роботов. Для проведения экспериментов использовался макет робота, состоящий из двух секций, причем первая секция соединена с концами трёх тросов, а вторая соединена с концами оболочек этих тросов. Данный макет позволяет имитировать движения робота, за исключением движений в процессе фиксации секций робота в трубе. Толщина использованных тросов составляла 1 мм.
Измерения проводились следующим образом. Все испытания снимались на камеру с высокой разрешающей способностью. Рядом с макетом был установлен лист с нанесённой на нём масштабной сеткой, и угол съёмки выбирался таким образом, чтобы макет в процессе работы находился на фоне масштабной сетки. После окончания эксперимента, обрабатывая полученные видеоматериалы, можно получить данные о перемещении первой секции макета робота.
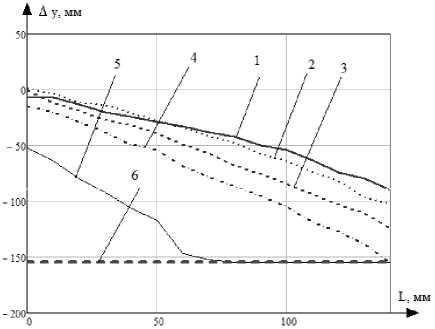
Рис. 3. Зависимость перемещения по вертикали первой секции робота Δy от длины тросов L: 1 – полезная нагрузка равна 0 кг, 2 – 0,1 кг, 3 – 0,15 кг, 4 – 0,25 кг, 5 – 0,55 кг, 6 – стенка трубы
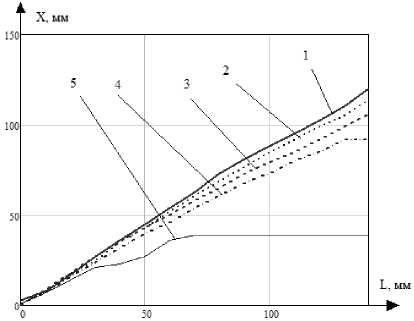
Рис. 4. Зависимость перемещения по горизонтали первой секции робота X от длины тросов L:
1 – полезная нагрузка равна 0 кг, 2 – 0,1 кг, 3 – 0,15 кг, 4 – 0,25 кг, 5 – 0,55 кг
Результаты экспериментальных исследований. Целью первого эксперимента было установление зависимости значения отклонения первой секции от горизонтали от массы полезной нагрузки при различных значениях расстояния между секциями робота, при горизонтальном расположении макета.
Следует отметить, что в рамках данного эксперимента перемещение первой секции робота в вертикальном направлении было ограничено стенкой трубы, которая находилась на расстоянии 155 мм начальной позиции первой секции. Пятый график на рис. 3 и 4 показывает, как первая секция упёрлась в стенку трубы.
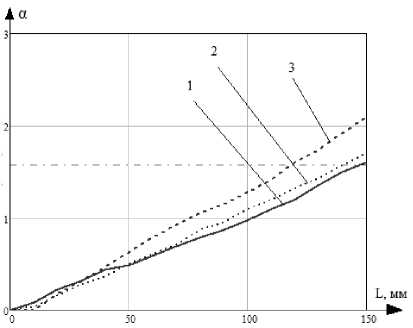
Рис. 5. Зависимость угла поворота α первой секции робота от длины одного троса L:
1 – полезная нагрузка равна 0 кг, 2 – 0,25 кг, 3 – 0,55 кг
Целью второго эксперимента было получение экспериментальных данных о движении робота в процессе поворота при различных значениях массы полезной нагрузки. В процессе эксперимента длины двух тросов оставались неизменными, а один удлинялся с шагом 10 мм. Графики, представленные на рис. 5 показывают, что угол поворота первой секции робота при определённой длине троса будет меняться в зависимости от величины полезной нагрузки.
Выводы: полученные экспериментальные данные могут быть использованы при проектировании роботов подобного типа. При известной заранее величине полезной нагрузки можно оценить степень деформации тросов в процессе движения вертикально вверх, перемещения по горизонтальным участкам трубы и в процессе поворота. Зная величину деформации тросов в процессе работы устройства можно настроить систему автоматического управления робота с учётом этих данных.
Список литературы Экспериментальные исследования управляемого движения робота с внешними актуаторами для мониторинга трубопроводов малого диаметра
- Segon, R. Strategy for navigation inside pipelines with differential-drive inpipe robot//Robotics and Automation, 2002. Proceedings. ICRA '02. IEEE International Conference on, Volume 3/Washington, 2002. P. 2575-2580.
- Tatar, O. Development of mobile minirobots for in pipe inspection tasks/O. Tatar, D. Mandru, I. Ardelean//ISSN 1392 -1207. MECHANIKA. 2007. No. 6(68). P. 60-64.
- Dertien, E. Basic maneuvers for an inspection robot for small diameter gas distribution mains/E. Dertien, S. Stramigioli//Robotics and Automation (ICRA), 2011 IEEE International Conference, May 2011.P. 3447-3448.
- Schempf, H. Visual and nondestructive evaluation inspection of live gas mains using the Explorer™ family of pipe robots/H. Schempf, E. Mutschler, A. Gavaert et al.//Journal of Field Robotics. 2010. V. 27, No 3, May. P. 217-249.
- Manabu, O. Development of an in-pipe inspection robot movable for a long distance/O. Manabu, H. Toshiaki, T. Masato, K. Shigeo//Nippon Kikai Gakkai Robotikusu, Mekatoronikusu Koenkai Koen Ronbunshu. 2001. №1. P. 91-92.
