Экспериментальный стенд бесконтактного контроля целостности лопастей вертолёта

Автор: Данилин Александр Иванович, Жуков Семен Викторович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 4-6 т.18, 2016 года.
Бесплатный доступ
Статья посвящена экспериментальным исследованиям метода контроля целостности лопастей несущего винта вертолёта. В работе приводятся результаты зондирования радиосигналом исследуемой модели лопасти в экспериментальном стенде. Проведен анализ полученных результатов и сделаны выводы о связи длительности и амплитуды сигнала с расстоянием до объекта исследования, отмечены основные преимущества и недостатки данного метода. Проведена оценка возможностей экспериментального стенда и возможности расширения его функциональных возможностей.
Вертолёт, несущий винт, лопасть, модель лопасти, экспериментальный стенд, датчик, длительность сигнала, амплитуда сигнала, свч-преобразователь
Короткий адрес: https://sciup.org/148204850
IDR: 148204850 | УДК: 620.179.18+620.1.051+533.662
Test bench of non-contact integrity control method of helicopter rotor blades
The article is devoted to experimental research of helicopter rotor blades. The paper presents the results of the test radio signal sensing blade models in the test bench. The analysis of the results and conclusions of the coherence duration and amplitude of the signal with the distance to the object of research, noted the advantages and disadvantages of this method. The evaluated of the test-bed and the possibility of expanding test bench functionality.
Текст научной статьи Экспериментальный стенд бесконтактного контроля целостности лопастей вертолёта
Несущий винт является важнейшим узлом вертолёта. Он обеспечивает, как подъемную силу, так и полетные качества вертолёта. Несущий винт в своем составе имеет втулку несущего винта, шарниры и лопасти. Именно от исправности этих деталей и механизмов зависит во многом работоспособность и целостность всего вертолёта.
Проанализировав существующие методы контроля целостности лопастей вертолёта, на Международной молодежной научной конференции «XII Королевские чтения», был предложен бесконтактный способ контроля целостности лопастей вертолёта [1].
Принципы, положенные в основу вышеуказанного способа, реализация аппаратурных блоков и устройств подробно представлены в [2]. Суть метода заключается в облучении лопастей зондирующим СВЧ сигналом и последующем анализе отраженного сигнала, а именно: в измерении его длительности, амплитуды, а также измерение временных интервалов между отраженными и принятыми потоками излучения от лопастей, преобразованными в импульсные сигналы. Приемо-передающий модуль устанавливается неподвижно в корпусе вертолёта на хвостовой балке. Схема расположения модуля представлена на рис. 1.
ЭКСПЕРИМЕНТАЛЬНЫЙ СТЕНД
Для изучения особенностей и возможностей предложенного метода был разработан и изготовлен экспериментальный стенд (рис. 2).

Рис. 1. Схема расположения приемо-передающего модуля на хвостовой балке вертолёта
Экспериментальный стенд позволяет имитировать вращение лопастей и получать информационный сигнал, определяемый отраженным СВЧ излучением от движущейся лопасти характеризующий взаимодействие зондирующего потока с поверхностью лопасти, а также позволяет регистрировать временное представление полученных электрических сигналов. На стенде предусмотрена установка двух бесконтактных преобразователей с возможностью регулировки расстояния до объекта контроля (высоты их расположения). Для этого в стенде предусмотрены два посадочных места в установочных механизмах 1 и 2. Установочные механизмы предназначены для регулировки расстояния от датчика до объекта исследования. В данном случае, в экспериментальном стенде установлены два СВЧ-преобразователя. Для последующей синхронизации функционирования измерительных устройств, отображения сигнала и контроля скорости вращения электродвигателя предусмотрен индуктивный бесконтактный датчик типа AR-LMF1-3005NA, реагирующий на оборотную метку в виде штыря, установленную на роторе электродвигателя. В качестве объекта контроля, в данном случае, на стенде установлена модель лопасти воздушного винта, выполненная в виде плоской металлической пластины. Для проведения измерений на различных частотах вращения ротора в блоке управления электродвигателем предусмотрено формирование трех фиксированных скоростей (40,3 Гц; 43,1 Гц; 44,64 Гц).
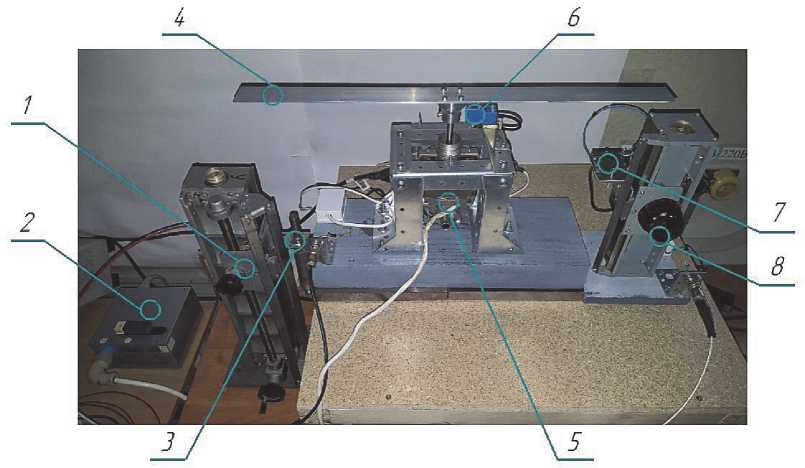
Рис. 2. Экспериментальный стенд для бесконтактного контроля целостности лопастей вертолёта: 1 – первый установочный механизм, 2 – блок управления электродвигателем,
3 – первый СВЧ-преобразователь, 4 – модель лопасть, 5 – электродвигатель, 6 – оборотный датчик,
7 – второй СВЧ-преобразователь, 8 – второй установочный механизм
Также необходимо отметить, что на самой модели лопасти возможна установка тензометрических и оптоволоконных Брэгговских датчиков.
ПРОВЕДЕНИЕ ЭКСПЕРИМЕНТОВ
Для проверки предложенного метода [1] и возможностей имитационного стенда использованы два типа СВЧ-преобразователей: отечественный МГТЭ-12 производства НИИ «ЭКРАН» г. Самара и зарубежный HB 100. Выход каждого из преобразователей подключен к цифровому осциллографу для визуального отображения и последующего анализа параметров выходного сигнала. Информационная составляющая содержится в длительности отраженного сигнала и его амплитуде, что было теоретически показано в работе [3]. Длительность сигнала зависит от диаграммы направленности СВЧ-преобразователя, поперечных размеров модели лопасти и от расстояния между преобразователем и моделью.
Амплитуда сигнала напрямую зависит от параметров СВЧ-преобразователя, углов установки лопастей, а также от расстояния между преобразователем и моделью. Таким образом, в результате эксперимента необходимо было проверить основные положения метода [1] и теоретические результаты работы [3]. Для этого были экспериментально получены амплитудные и временные зависимости от расстояния между приемо-передающим элементом СВЧ-преобразователей и объектом контроля – моделью лопасти.
На рис. 3 представлен внешний вид первого СВЧ-преобразователя – МГТЭ-12 и его антеннофидерная система.
На рис. 4 показана осциллограмма сигналов, полученных при детектировании отраженного от лопастей зондирующего СВЧ-сигнала.
СВЧ-преобразователь МГТЭ-12 помимо приемо-передающего модуля с термостабилизацией содержит амплитудный детектор. Напряжения питания модуля составляет 15 В ± 1%, частота

Рис. 3. Волноводная часть
СВЧ-преобразователя МГТЭ-12
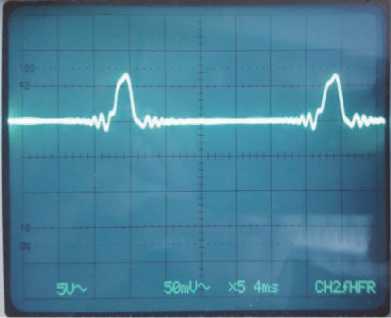
Рис. 4. Осциллограмма сигнала с МГТЭ-12
генерируемого сигнала – 12 ГГц, а выходная мощность - 40 мкВт. Разделение излучаемого и принимаемого сигналов осуществляется за счет микрополоскового циркулятора.
Второй СВЧ-преобразователь представляет собой доплеровский радар - HB 100. СВЧ-преобразователь HB 100 содержит приемную и передающую антенны, генератор и смеситель. Структурная схема и диаграмма направленности СВЧ-преобразователя представлены на рис. 5.
СВЧ-преобразователь HB 100 имеет выходную мощность 20 мВт, рабочее напряжение питания: 5 В ± 0.25 В и частоту генерируемого сигнала 10,5 ГГц. Пример осциллограммы выходного доплеровского сигнала в привязке к импульсу с оборотного датчика представлен на рис. 6.
В результате проведения эксперимента и обработки полученных результатов измерения были построены зависимости длительности принятого сигнала от расстояния до модели лопасти (рис. 7).
Полученные временные зависимости в обоих случаях показывают, что по мере увеличения расстояния от датчика до объекта контроля, увеличивается и длительность принятого сигнала. Увеличение длительности сигнала определяется шириной диаграммы направленности излучателей и полностью согласуется с видом диаграммы направленности и характером её изменения.
Кроме этого проведены эксперименты по определению зависимости амплитуды принятого сигнала от расстояния до лопасти для каждого СВЧ-преобразователя (рис. 8, 9).
Анализ графиков представленных на рис. 8 и 9 показывает, что существует периодичность изменения амплитудной характеристики, определяемой строением самих СВЧ-преобразователей. Периодичность изменения амплитудной характеристики в СВЧ-преобразователе HB100 связана с методом выделения доплеровского сигнала, за счет нелинейных преобразований принятого и опорного сигналов в смесителе. Для
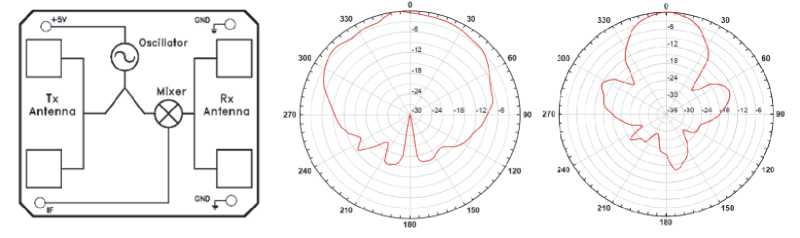
Рис. 5. Структурная схема и диаграмма направленности СВЧ-преобразователя HB 100

Рис. 6. Осциллограмма сигнала с выхода СВЧ-преобразователя HB 100
СВЧ-преобразователя МГТЭ-12, приведенный вид амплитудной характеристики получается из-за особенностей строения антенно-фидерной системы (АФС). АФС у МГТЭ-12 имеет общий канал для излучения и приема отраженного сигналов.
Также необходимо отметить, что в обоих случаях амплитуда выходного сигнала экспоненциально убывает.
ЗАКЛЮЧЕНИЕ
Разработан и изготовлен экспериментальный стенд, позволяющий имитировать вращательное движение лопастей и формировать информационные импульсные сигналы, определяемые
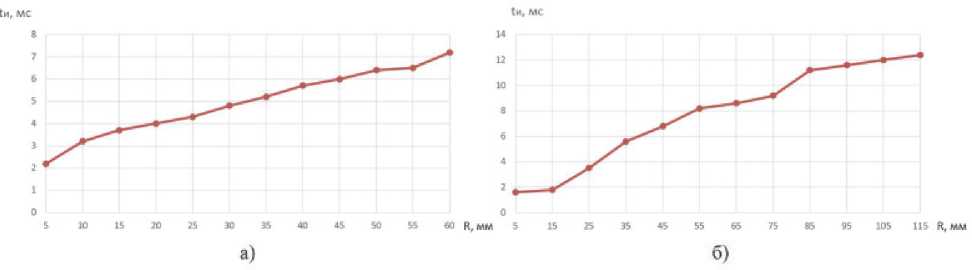
Рис. 7. Длительность принятого сигнала при использовании HB100 (а) и МГТЭ (б)
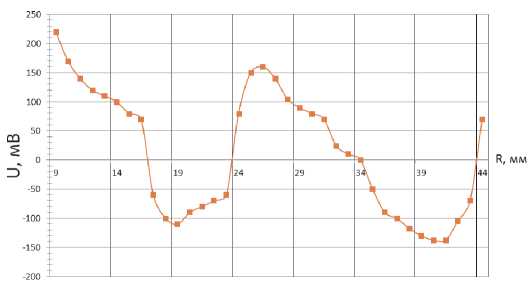
Рис. 8. Зависимость амплитуды принятого сигнала от расстояния до лопасти (HB100)
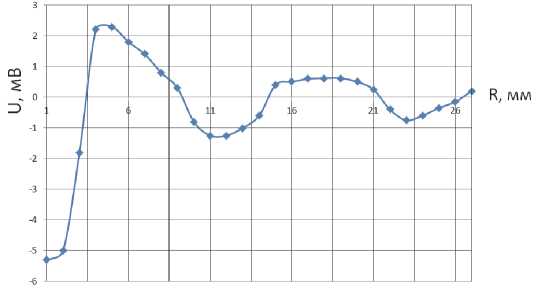
Рис. 9. Зависимость амплитуды принятого сигнала от расстояния до лопасти (МГТЭ-12)
отраженным СВЧ излучением от вращающейся модели лопасти. Анализируя, полученные на экспериментальном стенде данные, можно сделать вывод о хорошей корреляции результатов эксперимента и теоретических положений и, соответственно, о работоспособности способа и устройства контроля целостности лопастей несущего винта вертолёта [1,2], а также о состоятельности математической модели сигналов, получаемых путем преобразования, отраженного зондирующего СВЧ излучения от контролируемых лопастей винта вертолета [3].
Список литературы Экспериментальный стенд бесконтактного контроля целостности лопастей вертолёта
- Жуков С.В., Ефименко А.А. Бесконтактный контроль целостности лопастей вертолёта//Международная молодежная научная конференция «XII Королевские чтения». Т. 2. Самара, 2013. С. 124.
- Данилин А.И., Жуков С.В., Бояркина У.В., Грецков А.А. Способ контроля целостности лопастей несущего винта вертолёта и устройство для его осуществления: Пат. 2593652 (РФ). 2016.
- Жуков С.В., Попов М.С. Математическая модель сигнала отраженного от лопасти несущего винта вертолета//Материалы Всероссийской научно-технической конференции «Актуальные проблемы радиоэлектроники телекоммуникаций». Самара, 2015. С. 27-29.
