Электрифицированная ножовка на основе линейного электродвигателя для использования в садоводстве

Автор: Никитенко Геннадий Владимирович, Антонов Сергей Николаевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 3 (55), 2021 года.
Бесплатный доступ
Уровень электрификации и механизации процессов в садоводстве для различных плодовых культур находится в пределах от 10 до 60%. Увеличение эффективности производства тесно связано с повышением автоматизации технологических процессов до 90%. Детальная обрезка веток занимает до 30% от всех агротехнических мероприятий по уходу за садом. В систему машин по детальной обрезке деревьев входят секаторы, сучкорезы и ножовки. По принципу действия ножовки бывают: ручные, пневматические, гидравлические и электрические. Основными недостатками являются низкая производительность, большая вибрация, шум и массогабаритные показатели. Наиболее эффективны электрические ножовки. Целью представленного исследования является разработка электрифицированной ножовки на основе линейного электродвигателя. Авторами предложена конструкция ножовки с использованием в качестве привода для ножовочного полотна линейного электродвигателя. Принцип действия ножовки основывается на возвратно-поступательном движении якоря линейного электродвигателя. Осуществляется это за счет использования двух катушек намагничивания и специальной конструкции якоря. Наличие немагнитных и магнитных вставок позволяет получить магнитные потоки, которые приводят к появлению силы тяги якоря. Использование предложенной конструкции ножовки позволит повысить КПД, снизить вибрацию, шум и массогабаритные показатели. Моделирование линейного электродвигателя в программном комплексе ELCUT позволило подтвердить принцип действия магнитной системы. В местах нахождения немагнитной вставки происходит разделение магнитного потока, что способствует появлению силы тяги, действующей на якорь. Наибольшее значение силы тяги первой намагничивающей катушки (43,6 Н) при ширине немагнитной вставки 10 мм и угле скоса полюса в 60°. Для второй намагничивающей катушки сила тяги такая же, как и для первой намагничивающей катушки.
Линейный электродвигатель, магнитная система, сила тяги, намагничивающая катушка, магнитная индукция, магнитный поток, садоводство, ветки деревьев, детальная обрезка, ножовка
Короткий адрес: https://sciup.org/140261899
IDR: 140261899 | УДК: 634.1-13,
Electric hacksaw based on a linear electric motor for use in garden
The level of electrification and mechanization of processes in horticulture for various fruit crops ranges from 10 to 60%. An increase in production efficiency is closely related to an increase in the automation of technological processes up to 90%. Detailed pruning of branches takes up to 30% of all agrotechnical measures for the care of the garden. The system of detailed tree pruning machines includes pruners, choppers and hacksaws. According to the principle of operation, hacksaws are manual, pneumatic, hydraulic and electric. The main disadvantages are low productivity, high vibration, noise and weight and dimensions. Electric hacksaws are most effective. The aim of the presented research is to develop an electrified hacksaw based on a linear electric motor. The authors proposed a hacksaw design, using a linear electric motor as a drive for the hacksaw blade. The principle of operation of the hacksaw is based on the reciprocating movement of the armature of a linear electric motor. This is done through the use of two magnetizing coils and a special armature design. The presence of non-magnetic and magnetic inserts allows you to obtain magnetic fluxes, which lead to the appearance of an armature pulling force. The use of the proposed design of the hacksaw will increase the efficiency, reduce vibration, noise and weight and dimensions. Modeling a linear electric motor in the ELCUT software package made it possible to confirm the principle of operation of the magnetic system. In the places where the non-magnetic insert is located, the magnetic flux is separated, which contributes to the appearance of the traction force acting on the armature. The greatest value of the traction force of the first magnetizing coil (43,6 N), with a non-magnetic insert width of 10 mm and a pole bevel angle of 60°. For the second magnetizing coil, the pulling force is the same as for the first magnetizing coil.
Текст научной статьи Электрифицированная ножовка на основе линейного электродвигателя для использования в садоводстве
Введение . В промышленном садоводстве одним из самых затратных мероприятий является детальная обрезка деревьев. Обрезка – это важное агротехническое мероприятие, необходимое для обеспечения хорошего роста растения и получения максимального урожая. В качестве инструмента для обрезки веток диаметром до 30 мм используют секаторы и сучко-

в г а – ручная; б – гидравлическая; в – пневматическая; г – электрическая Рисунок 1 – Ножовки для спиливания веток
резы [1–7]. Ветки диаметром более 30 мм наиболее эффективно обрезать с помощью ножовок. В настоящее время существует множество ножовок для спиливания веток. Проведенный анализ позволил определить следующие группы инструмента по спиливанию веток: ручной, гидравлический, пневматический и электрический (рисунок 1).
a – manual; б – hydraulic; в – pneumatic; г – electric
-
Figure 1 – Hacksaws for cutting branches
К недостаткам ручного инструмента можно отнести большую мышечную нагрузку обрезчика и, как следствие, снижение производительности. Пневматический и гидравлический инструмент повышает эффективность работы обрезчика, но при этом нуждается в источнике энергии и линиях связи с ним, а также имеет высокую вибрацию (1–2 мм) и шум (50–70 дБ). Электрифицированный инструмент по сравнению с остальными имеет ряд преимуществ. Основными преимуществами являются повышенный КПД (0,95), мобильность обрезчика из-за использования аккумуляторной батареи, низкая вибрация (0,2 мм) и шум (20–30 дБ). Современные электрифицированные ножовки используют двигатели постоянного тока, что требует нали- чия трансмиссионной передачи для преобразования вращательного движения двигателя в возвратно-поступательное движение ножовочного полотна.
В связи с этим целью представленного исследования является разработка электрифицированной ножовки на основе линейного электродвигателя.
Методика исследования. Предлагаемая ножовка (рисунок 2) содержит корпус 1, в котором размещается аккумуляторная батарея 2, кнопка включения 3, устройство управления 4, линейный электродвигатель 5, состоящий из магнитного корпуса 6, первой намагничивающей катушки 7, второй намагничивающей катушки 8, первой немагнитной вставки 9, второй немаг- нитной вставки 10 и якоря 12, закрепленного при помощи подшипников скольжения 13, 14 в корпусе 1. Якорь 12 состоит из первой немагнитной втулки 15, магнитной втулки 16 и второй немагнитной втулки 17, при этом ножовочное полотно 18 соединено зажимным устройством 19 с якорем 12, а также защитная подошва 20 закреплена при помощи винта 21 к корпусу 1.
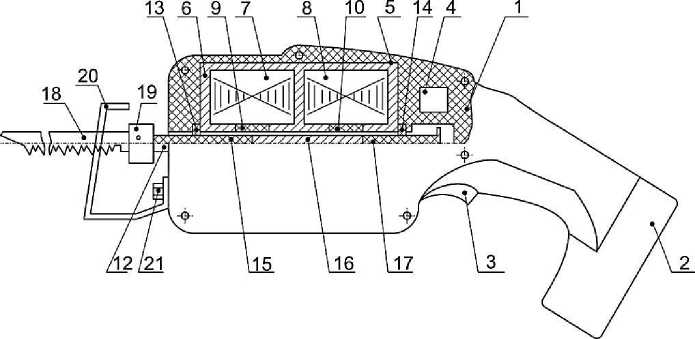
Рисунок 2 – Ножовка на основе линейного двигателя
-
Figure 2 – Hacksaw based on a linear motor
Предлагаемая ножовка работает следующим образом: при отсутствии питания первой намагничивающей катушки 7 и второй намагничивающей катушки 8, линейного электродвигателя 5, ножовочное полотно 18, соединенное зажимным устройством 19 с якорем 12, занимает крайнее правое положение. При нажатии кнопки включения 3 от аккумуляторной батареи 2 подается напряжение 24 В через устройство управления 4 на первую намагничивающую катушку 7, и по ней начинает протекать ток, создающий магнитный поток Ф1, протекающий по магнитному корпусу 6 (рисунок 3).
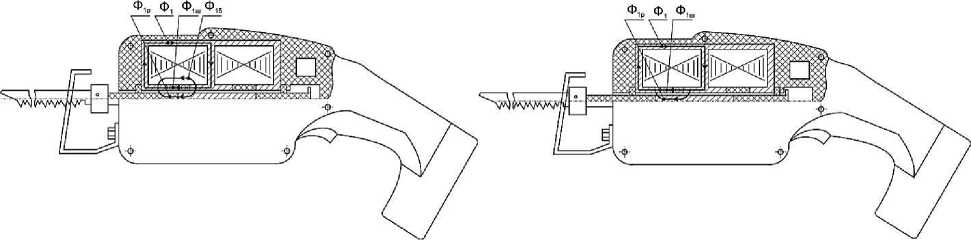
а б а – в начале работы первой намагничивающей катушки; б – в крайнем левом положении Рисунок 3 – Разрез ножовки с нанесением основных магнитных потоков
a – at the beginning of the operation of the first magnetizing coil; б – in the extreme left position Figure 3 – Section of a hacksaw with the application of the main magnetic fluxes
Магнитный поток Ф1 разделяется на рабочий магнитный поток Ф1р, проходящий по магнитной втулке 16 и первой немагнитной втулке 15, шунтирующий магнитный поток Ф1ш, проходящий по первой немагнитной вставке 9, а также рассеянный магнитный поток Ф1δ, проходящий по первой намагничивающей катушке 7, далее они суммируются в магнитном корпусе 6. Разделение магнитного потока Ф1 происходит из-за наличия первой немагнитной вставки 9, а также первой немагнитной втулки 15, что приводит к соизмеримости магнитного сопротивления прохождению магнитных потоков Ф1р, Ф1ш и Ф1δ между собой. В результате прохождения рабочего магнитного потока Ф1р возникает электромагнитная сила, перемещающая якорь 12, закрепленный при помощи подшипников скольжения 13, 14 в крайнее левое положение, причём зажимное устройство 19 не доходит до защитной подошвы 20, закрепленной при помощи винта 21 к корпусу 1. При крайнем левом положении якоря 12 магнитный поток Ф1 разделяется на рабочий магнитный поток Ф1р, проходящий по магнитной втулке 16, шунтирующий магнитный поток Ф1ш, проходящий по первой немагнитной вставке 9, причем за счет снижения магнитного сопротивления на пути рабочего магнитного потока Ф1р исчезает рассеянный магнитный поток Ф1δ.
В следующий момент устройство управления 4 отключает напряжение от первой намагничивающей катушки 7 и подает напряже- ние на вторую намагничивающую катушку 8, по которой начинает протекать ток, создающий магнитный поток Ф2, замыкающийся по магнитному корпусу 6 (рисунок 4). Магнитный поток Ф2 разделяется на рабочий магнитный поток Ф2р, проходящий по магнитной втулке 16 и второй немагнитной втулке 17, шунтирующий магнитный поток Ф2ш, проходящий по второй немагнитной вставке 10, а также рассеянный магнитный поток Ф2δ, проходящий по второй намагничивающей катушке 8, далее они суммируются в магнитном корпусе 6. Разделение магнитного потока Ф2 происходит из-за наличия второй немагнитной вставки 10 и второй немагнитной втулки 17, что приводит к соизмеримости магнитного сопротивления прохождению магнитных потоков Ф2р, Ф2ш и Ф2δ между собой.
Ф» Ф= Ф=ш
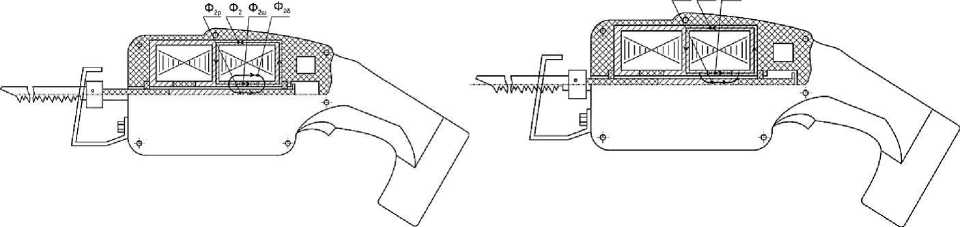
а б а – в начале работы второй намагничивающей катушки; б – в крайнем правом положении Рисунок 4 – Разрез ножовки с нанесением основных магнитных потоков
a – at the beginning of the operation of the second magnetizing coil; б – in the extreme right position Figure 4 – Section of a hacksaw with the application of the main magnetic fluxes
В результате прохождения рабочего магнитного потока Ф 2р возникает электромагнитная сила, перемещающая якорь 12 в крайнее правое положение. При достижении крайнего правого положения якоря 12 магнитный поток Ф 2 разделяется на рабочий магнитный поток Ф 2р , проходящий по магнитной втулке 16, и шунтирующий магнитный поток Ф 2ш , проходящий по второй немагнитной вставке 10, причём за счёт снижения магнитного сопротивления на пути рабочего потока Ф 2р исчезает рассеянный магнитный поток Ф 2δ .
Основной задачей при проектировании ножовки является создание линейным электродвигателем усилия, необходимого для спиливания веток. Величина этого усилия зависит от вида дерева. Усилие для перерезания веток яблони секатором изменяется в диапазоне от 300 до 1200 Н. Ветки груши требуют усилия перерезания от 200 до 900 Н. Для достижения этой цели нужно выполнить моделирование магнитной системы линейного электродвигателя. Программный комплекс ELCUT позволяет произвести расчет магнитной системы и определить такие величины, как сила тяги якоря (F, Н), напряженность магнитного поля (Н, А/м), индуктивность катушки намагничивания (L, Гн), магнитная индукция (В, Тл), а также потокосцепление (ψ) [8–10]. Для правильного решения поставленной задачи нужно создать геометрическую модель линейного электродвигателя, задать магнитные и электрические свойства используемых материалов.
Следующим этапом является задание граничных условий. Условие Дирихле задает на части границы известный векторный магнитный потенциал в вершине или на ребре модели. Это граничное условие определяет поведение нормальной составляющей индукции на границе. Для осесимметричной задачи оно имеет вид (1):
cr rA = a + bzr +--, (1)
где А 0 – векторный магнитный потенциал, Тл∙м;
-
r, z – цилиндрические координаты;
-
a, b, c – постоянные величины для каждого ребра.
В нашем случае заданное значение для внешних областей расчета будет определяться нулевым потенциалом ( rA = 0 ) (рисунок 5).

Рисунок 5 – Построение сетки и задание граничных условий
Figure 5 – Meshing and setting boundary conditions
После задания граничных условий необходимо построить конечно-элементную, сетку. Точность решения поставленной задачи будет зависеть от густоты сетки. Чем выше густота сетки, тем выше точность полученных данных.
Основным параметром при расчете линейного электродвигателя является сила тяги якоря. При равномерном распределении магнитного потока в рабочем зазоре сила тяги может быть определена по формуле (2):
F = BS ==' , (2)
2^ 2^ S 2^ Sto где В – магнитная индукция, Тл;
-
Ф – магнитный поток, Вб;
S – поперечное сечение якоря, мм2;
-
μ 0 – магнитная постоянная, Гн/м;
-
ψ – потокосцепление, Вб;
-
ω – количество витков обмотки.
Эффективность работы линейного электродвигателя зависит от геометрии магнитной системы. Поэтому при определении наиболее рациональной конструкции принимаем два фактора оптимизации. Первый фактор варьирования – угол скоса полюсов (α). Второй фактор варьирования – длина немагнитной вставки (h).
Результаты исследований и их обсуждение . Определение рациональных параметров полюсов магнитной системы линейного электродвигателя является важной задачей при разработке электрифицированной ножовки. В предложенной конструкции линейного электродвигателя возможно изменение таких параметров магнитной системы, как угол скоса полюсов и ширина немагнитной вставки (рисунок 6).
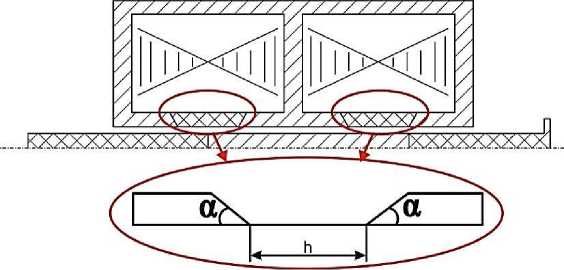
Рисунок 6 – Форма полюсов магнитной системы линейного электродвигателя
Figure 6 – The shape of the poles of the magnetic system of a linear electric motor
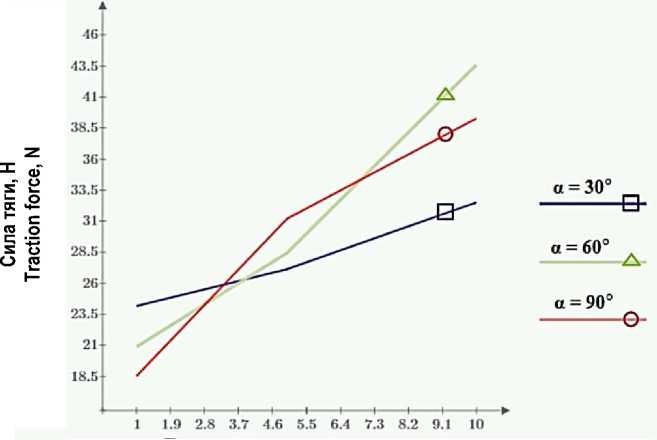
В ходе проведения моделирования значение угла скоса полюсов (α) принималось 30°, 60°, 90°. Изменение длины немагнитной вставки (h) варьировалось в пределах длины хода якоря, от максимального значения в 10 мм, среднего 5 мм и минимального 1 мм.
Выполнив расчет конструкции магнитной системы линейного электродвигателя в программном комплексе ELCUT, получим картину распределения магнитных потоков. Создание магнитным потоком требуемой силы тяги, дей- ствующей на якорь, определяется величиной магнитного потока, исходящего из торцевой поверхности якоря. Использование программного комплекса ELCUT позволяет определить силу тяги якоря.
По полученным значениям были построены графики изменения силы тяги якоря при включении первой намагничивающей катушки, изображенные на рисунке 7. Для второй намагничивающей катушки сила тяги такая же как и для первой катушки.
Длина немагнитной вставки, мм
Non-magnetic insert length, mm
Рисунок 7 – Изменение силы тяги якоря при включении первой намагничивающей катушки
Figure 7 – Change in the armature pulling force, when the first magnetizing coil is turned on
В результате моделирования линейного электродвигателя подтвержден принцип действия магнитной системы. В местах расположения немагнитной вставки происходит разделение магнитных потоков в сторону якоря и намагничивающей катушки. Магнитный поток, проходя по элементам якоря, способствует появлению силы тяги якоря. Изменяя параметры магнитной системы, можно влиять на значение силы тяги якоря.
Заключение . Электрический ток, проходящий по первой и второй намагничивающей катушке, создает магнитный поток, который, проходя по якорю линейного электродвигателя, создает силу тяги.
Изучая полученные данные, можно отметить, что наибольшее значение этой силы (43,6 Н) при включении первой намагничивающей катушки якорь развивает при ширине немагнитной вставки 10 мм и угле скоса полюса в
-
60°. Для второй намагничивающей катушки значение силы тяги аналогично силе тяги первой намагничивающей катушки.
Список литературы Электрифицированная ножовка на основе линейного электродвигателя для использования в садоводстве
- Апхудов Т.М., Шекихачева Л.З. Обоснование технологической схемы агрегата и принципиальной схемы пилы с электрическим приводом // Символ науки: международный научный журнал. 2015. № 7. Т. 1. С. 14-15.
- Апхудов Т.М., Шекихачева Л.З. Обоснование технологических параметров садовой пилы с электрическим приводом // Символ науки: международный научный журнал. 2015. № 7. Т. 1. С. 16-17.
- Апхудов Т.М., Шомахов Л.А., Шекихачев Ю.А. Исследование процесса резания ветвей плодовых деревьев ножовочным полотном // Инновационная наука: международный научный журнал. 2015. № 9. С. 51-52.
- Апхудов Т.М., Шомахов Л.А., Шекихачев Ю.А. Исследование процесса резания ветвей плодовых деревьев электрическим секатором // Инновационная наука: международный научный журнал. 2015. № 9. С. 49-50.
- Пат. 2311016 Российская Федерация, МПК А01G 3/033, А01G 3/02. Секатор / Гаппоев Т.Т., Тавасиев Р.М., Козаев Т.С., Цебоев Э.А.; заявитель и патентообладатель ФГОУ ВПО Горский ГАУ. № 2006118073; заявл. 25.05.2016; опубл. 27.11.2007, Бюл. № 33. 6 с.
- Мошкин В.И., Нейман В.Ю., Угаров Г.Г. Импульсные линейные электромагнитные двигатели: монография. Курган: Изд-во Курганского гос. ун-та, 2010. 220 с.
- Csanády E., Magoss E. (2013). Mechanics of Wood Machining. 2-nd ed. Springer-Verlag Berlin Heidelberg, 199 p.
- Antonov S., Nikitenko G. Linear electric motor for handheld electrified tools used in gardening // Materials of the of 18th International scientific conference "Engineering for rural development", 22-24.05.2019. Jelgava, Latvia, 2019. P. 804-807.
- Nikitenko G., Antonov S. Simulation of linear electric motor for electromechanical pruner. Proceeding of 7th International conference on "Trends in agricultural engineering 2019", 17th-20th September 2019. Prague, Czech Republic, 2019. P. 40-44.
- Nikitenko G., Antonov S. Lopper for trimming trees driven by linear electric motor // Materials of the of 19th International scientific conference "Engineering for rural development", 20-22.05.2020. Jelgava, Latvia, 2020. P. 833-837.
