Электромагнитная система компенсации веса

Автор: Максимов В.Н., Максимов П.Н., Кондратьев К.В.
Журнал: Космические аппараты и технологии.
Рубрика: Ракетно-космическая техника
Статья в выпуске: 4, 2025 года.
Бесплатный доступ
В статье детально представлены результаты исследования и разработки уникальной активной электромагнитной системы компенсации веса, созданной инженерами АО «Решетнёв». Основное предназначение данной системы – проведение модальных испытаний современных слабодемпфированных конструкций, характерных для космической отрасли. Ключевая задача системы заключается в создании и поддержании условий, максимально достоверно моделирующих состояние невесомости на Земле. Этот эффект достигается благодаря сложному, прецизионно управляемому взаимодействию электродинамических сил. Авторами подробно изложен основной принцип функционирования системы, а также её конструктивная реализация, уделено особое внимание описанию ключевых узлов. Предложен и математически обоснован инновационный метод формирования зависимости управляющего тока от координаты подвижного элемента, что является основой точного управления. Для обеспечения высочайшей стабильности и динамической точности в систему были интегрированы и адаптированы продвинутые алгоритмы регулирования, использующие ПИД-контроль. Существенный скачок в качестве управления был достигнут за счёт внедрения специализированного мощного усилителя тока, который позволил убрать электродвижущую силу индукции и существенно повысить точность задания возбуждающей силы. Проведённый комплекс экспериментальных исследований и испытаний в полной мере подтвердил высокую эксплуатационную состоятельность и эффективность всех разработанных технических решений. Полученные результаты также позволили выявить конкретные перспективные направления для дальнейшей оптимизации системы с целью улучшения её характеристик.
Электромагнитная система компенсации веса, модальные испытания аэрокосмической техники, алгоритм компенсации веса
Короткий адрес: https://sciup.org/14134201
IDR: 14134201 | УДК: 629.78 | DOI: 10.26732/j.st.2025.4.05
Electromagnetic weight compensation system
This article presents in detail the results of the research and development of a unique active electromagnetic weight compensation system created by engineers at JSC «Reshetnev». The primary purpose of this system is to conduct modal testing of modern, weakly damped structures typical of the space industry. The key objective of the system is to create and maintain conditions that accurately simulate zero-gravity conditions on Earth. This effect is achieved through a complex, precisely controlled interaction of electrodynamic forces. The authors describe in detail the system's basic operating principle and its design implementation, paying particular attention to the description of key components. An innovative method for generating the control current dependence on the coordinates of the moving element, which forms the basis for precise control, is proposed and mathematically substantiated. To ensure the highest stability and dynamic accuracy, advanced control algorithms using PID control were integrated and adapted into the system. A significant improvement in control quality was achieved through the implementation of a specialized high-power current amplifier, which eliminated the induced electromotive force and significantly increased the accuracy of the excitation force setting. A series of experimental studies and tests fully confirmed the high operational feasibility and effectiveness of all developed technical solutions. The results also allowed us to identify specific promising areas for further optimization of the system to improve its performance.
Текст научной статьи Электромагнитная система компенсации веса
В наше время для проверки достоверности конечно-элементных моделей аэрокосмических конструкций активно стали использоваться модальные испытания [1–4]. Эти испытания позволяют получить подлинные динамические характеристики изделия, обеспечивая основу для корректного сравнения с результатами численного моделирования.
Для получения максимально достоверных результатов модальных испытаний [5–7] необходимо воссоздание условий, приближенных к тем, в которых техника будет функционировать на самом деле. И ключевым фактором здесь выступает состояние невесомости. Добиться такого режима на земле позволяет применение специализированных систем обезвешивания [8–11], которые частично или полностью нейтрализуют влияние гравитации на исследуемый объект.
Наиболее прогрессивной разновидностью таких систем являются активные комплексы обезве-шивания. Это высокотехнологичные установки,
снабжённые сенсорами и исполнительными механизмами, работающими в рамках замкнутого контура управления. Их задача – в режиме реального времени компенсировать силу тяжести, обеспечивая «искусственную невесомость».
Особый интерес в научной и инженерной среде вызывают магнитные системы обезвеши-вания. Используя мощное магнитное поле, они способны создавать значительные уравновешивающие усилия, при этом отличаясь низким энергопотреблением [12,13]. Такая эффективность позволяет значительно сократить габариты оборудования и повысить его мобильность и технологичность.
В настоящей работе показана активная магнитная система компенсации веса, включающая в себя как неподвижные, так и подвижные элементы. К первым относятся: стальной корпус (1), постоянный магнит (2), стальной диск (4), энкодер (7) и аэростатический подшипник (5). Подвижная часть представлена медной катушкой (3), штоком (6) и линейкой (8). Компоновочная схема устройства изображена на рисунке 1.
Медная катушка подключена к источнику электропитания, и при прохождении по ней электрического тока в соответствии с законом Ампера возникает электромагнитная сила, индуцирующая поступательное перемещение катушки вдоль вер-
тикальной оси. Вектор этого движения определяется направлением тока, что позволяет управлять вертикальным положением подвижного элемента за счёт изменения силы тока [14, 15].
Состояние динамического равновесия достигается в тот момент, когда сила Ампера точно уравновешивает гравитационное воздействие на подвижную часть, обеспечивая тем самым её устойчивую левитацию – физически реализуемую аналогию условий невесомости.
Во избежание паразитного механического трения, способного вносить нежелательные диссипативные потери и снижать чувствительность си- 241 стемы, в конструкции используется аэростатический подшипник [16]. Он работает на принципах газовой смазки, формируя несущий слой воздуха между соприкасающимися поверхностями.
Система управления реализована на основе обратной связи, включающей высокоточный энкодер и линейку положения. Эти компоненты позволяют с высокой точностью отслеживать вертикальное смещение подвижной части и корректировать подаваемое напряжение, обеспечивая непрерывный контроль и точную стабилизацию положения в режиме реального времени.
1. Кривая зависимости тока от положения
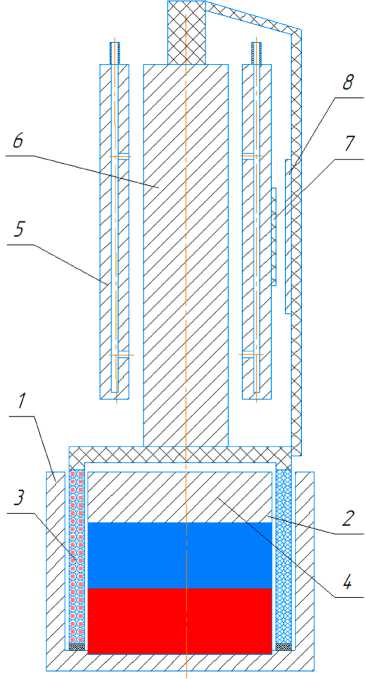
Рисунок 1. Активная система компенсации веса
Свободный ход подвижного элемента составляет 32 мм при массе 792 г, что требует силы 7.7 Н для полной компенсации гравитации. Однако из-за нелинейного распределения магнитного поля в зазоре между постоянным магнитом и корпусом одинаковый ток в катушке вызывает различную по величине силу Ампера в зависимости от текущего положения элемента.
Для стабилизации системы необходимо определить зависимость тока от координаты подвижного элемента, обеспечивающую постоянную гравитационную компенсацию по всему диапазону перемещений. Это позволяет точно регулировать ток, формируя требуемую уравновешивающую силу. При изменении массы элемента управляющий ток масштабируется пропорционально весу, что сохраняет режим обезвешивания без модификации аппаратной части.
Для построения соответствующей характеристики реализован алгоритм на C++ с ПИД-регулятором (пропорциональный интегрирующий дифференцирующий регулятор), управляющим генератором напряжения. Алгоритм загружен в микроконтроллер и использует данные от энкодера с разрешением 1 мкм. Таким образом, при смещении на 32 мм регистрируется 32 000 импульсов [17].
Напряжение измерялось с шагом 100 мкм, на каждом участке фиксировались 1000 отсчётов,
Том 9
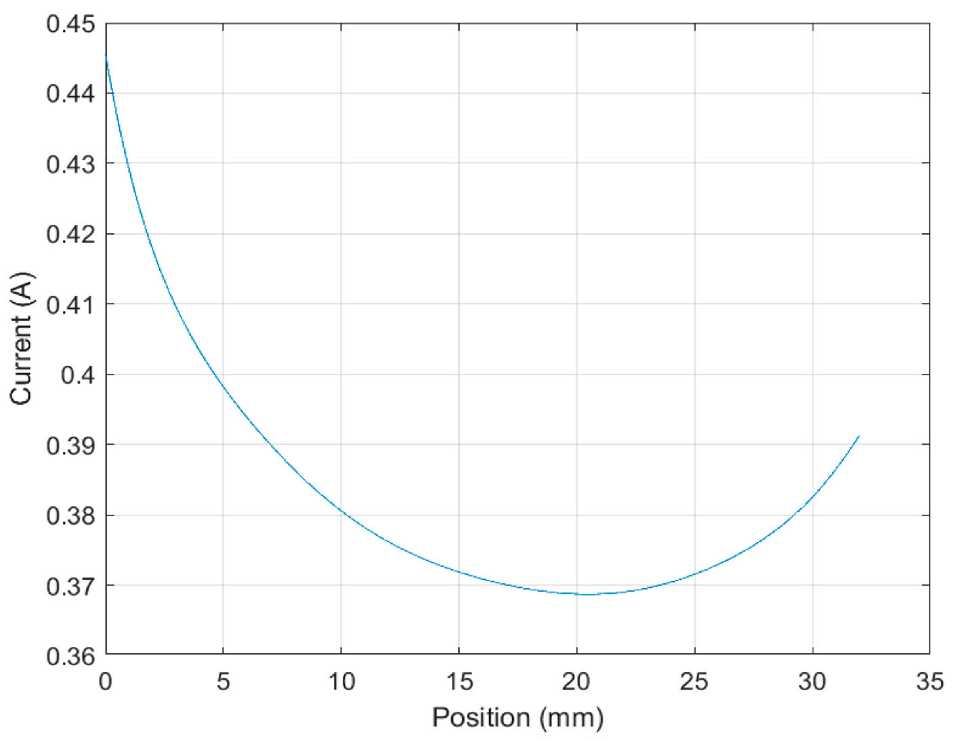
Рисунок 2. Зависимость тока от положения подвижного элемента
которые усреднялись. После прохождения полного диапазона получено 320 точек. Измерения повторены пять раз, данные усреднены и аппроксимированы в MATLAB [18–20]. Данная зависимость изображена на рисунке 2.
2. Алгоритм компенсации веса
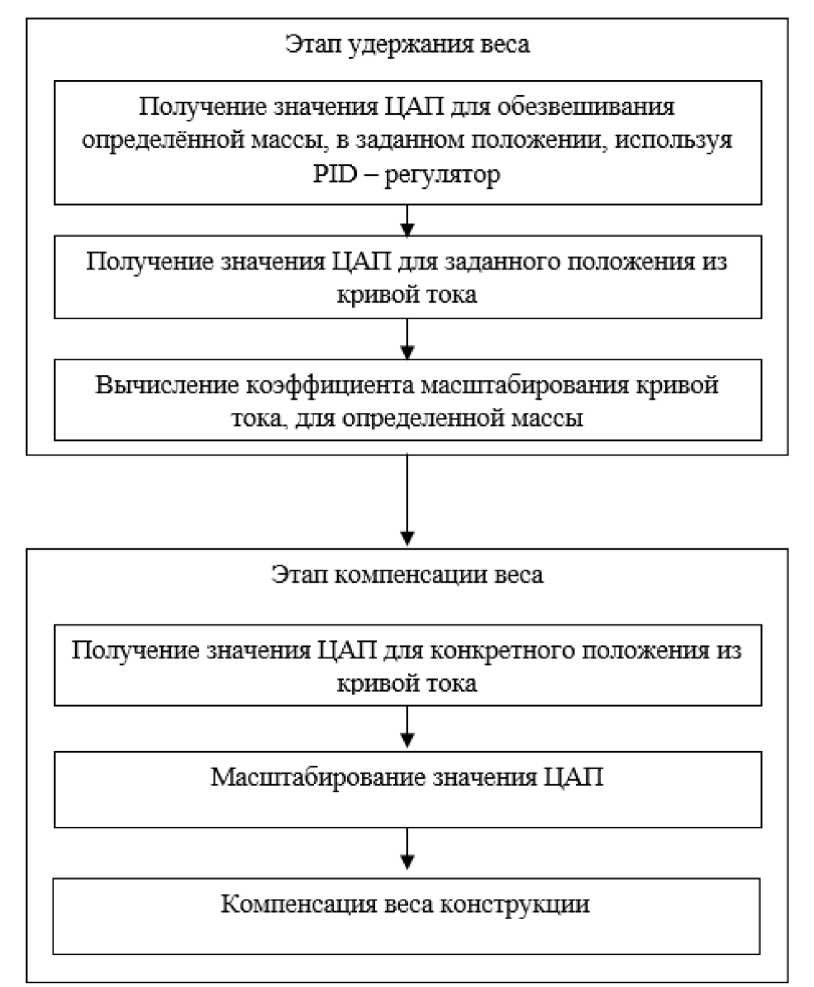
Для адаптации системы к изменению массы обезвешиваемого объекта перед активацией основного режима компенсации был реализован предварительный этап – режим удержания веса. На этом этапе измерялось фактическое значение управляющего сигнала ЦАП (цифроаналоговый преобразователь) для конкретной координаты при новой массе подвижной части.
Полученное значение сравнивалось с эталонным током, взятым из базовой характеристики зависимости тока от положения. На основе их соотношения вычислялся масштабирующий коэффициент, отражающий индивидуальную нагрузочную конфигурацию системы.
После определения этого коэффициента система переходила в активный режим обезвешивания. На каждом участке перемещения управляющий ток рассчитывался по базовой кривой и далее модифицировался с учётом масштабирующего коэффициента, обеспечивая точную и стабильную компенсацию силы тяжести при произвольной массе объекта.
Логическая структура и последовательность вычислений, реализованных в программном обеспечении системы, представлена на рисунке 3.
3. Усилитель тока
Во время испытаний возбуждающая сила является силой Ампера, описываемой следующим уравнением:
f =
dx
Bl ( x ) • ( K • Uv ( x ) + Kv • Us sin( ^ t ) - Bl ( x ) — ) d- , (1)
R
где Ky – коэффициент усиления усилителя, R – активное сопротивление системы, Up(x) – напряжение обезвешивания, Us – амплитуда гармониче- dx ского сигнала, Bl(x) - ЭДС (электродвижущая dt сила) индукции.
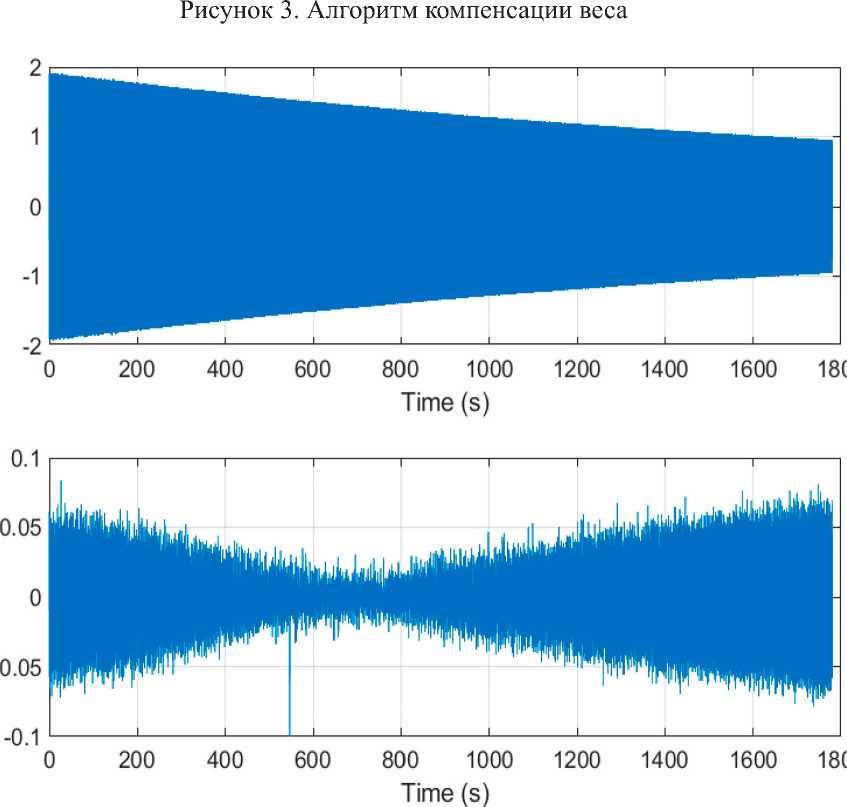
ЭДС индукции, создаваемая в проводнике при движении катушки в магнитном поле, представляет собой паразитный эффект, который приводит к снижению возбуждающей силы на резонансе и тем самым к падению амплитуды отклика системы. Порой это может привести к тому, что во временном диапазоне невозможно будет увидеть резонанс, как это показано на рисунке 4.
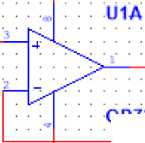
Для борьбы с данным эффектом был собран усилитель тока, представленный на рисунке 5.
Система питается от постоянного источника напряжения V1. Напряжение V2 является симуляцией напряжения, выдаваемого ЦАП микроконтроллера, представляет собой источник сигнала. Операционный усилитель U1A работает в режиме повторителя и выполняет роль буфера, обладая высоким входным сопротивлением и маленьким выходным, он без искажений способен передать
Forse (N) Position (mm)
U |_
ОСМИНЕСКИЕ АППАРАТЫ VI ТЕХНОЛОГИЙ иен
Том 9
Supply
Supply
Supply-
I VI ■ : ^12V
"^ }10Hz
---O’' '
RI
—VA-: ют
OP727 IRU
:::::::: :r2
шо: io%
Key-A.....

UP727ARU
Supply-

R5
ID
Q2....... 1IRF540N
уз :::: i\ зурк:::
/10Hz до*:

0.D05H
R3
20:
L1
R4 олп :: 1% :
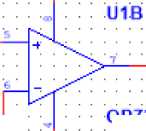
Рисунок 5. Усилитель тока сигнал на низкоомную нагрузку. Резистор R1 и потенциометр R2 представляют собой делитель напряжения, которым и будет регулироваться усили-ение сигнала. Операционный усилитель U1B связан отрицательной обратной связью с резистором R4 и в зависимости от отклика выдает управляющее напряжение на транзистор Q2. Транзистором Q2 регулируется ток, проходящий через нагрузку. Индуктивность катушки L1 и её сопротивление R3 представляют собой нагрузку. Напряжение V3 имитирует напряжение ЭДС индукции проводника в магнитном поле.
Сила тока в этой схеме зависит от напряжения на положительном входе операционного усилителя U1B и от сопротивления резистора R4. Данная зависимость описывается формулой
I = -N +- , (2)
R 4
где — 1N + - напряжение на положительном входе операционного усилителя U1B.
Результаты симуляции представлены на рисунке 6.
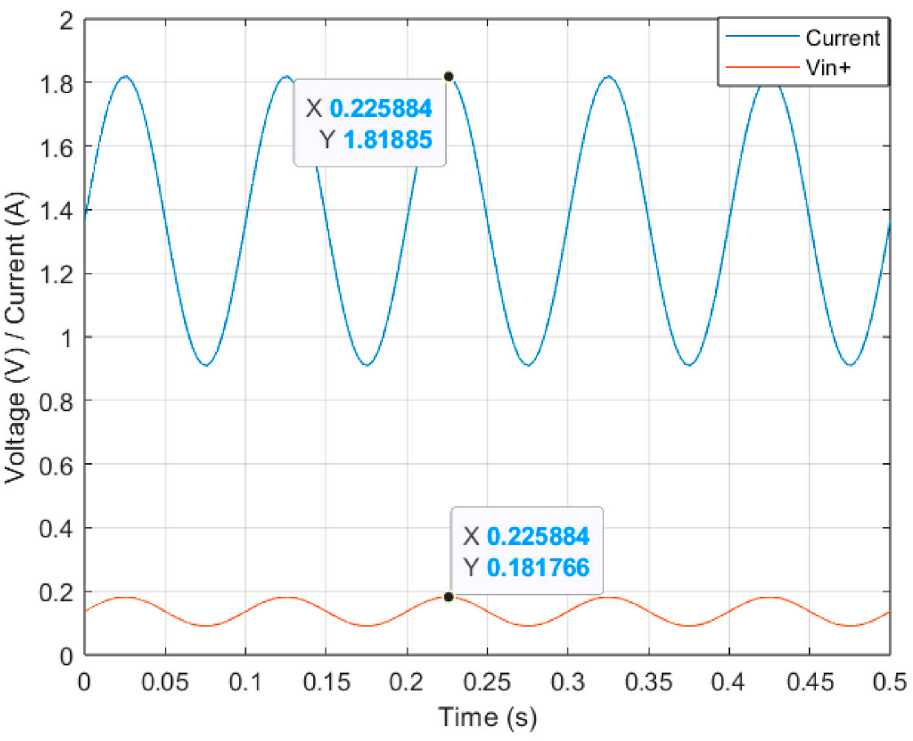
Рисунок 6. Результаты симуляции
Ток в фазе с напряжением и его амплитуда соответствуют формуле (2). В сигнале не наблюдается паразитный эффект, создаваемый ЭДС индукцией, и из уравнения (1) пропадает член, отвечающий за данный эффект. Наблюдаемый результат дает два существенных преимущества. Первое – теперь сила тока не будет падать на резонансе. Второе – в уравнении (1) теперь известны все переменные, и амплитуду возбуждающей силы можно задавать напрямую.
С усилителем тока амплитуда возбуждающей силы задаётся оператором напрямую. Разработанный управляющий алгоритм, обладая априорной информацией о магнитных свойствах системы, самостоятельно вычисляет требуемую амплитуду подаваемого напряжения, необходимую для генерации заданной силы. И необходимость использовать датчик силы для записи возбуждающей силы пропала.
Был проведён эксперимент, в ходе которого оператор задал амплитуду и частоту возбуждающей силы. После этого регистрировался ток, протекающий через катушку, и на его основе рассчитывалась соответствующая величина возбуждающей силы. Сопоставление заданного и полученного значений позволит оценить точность работы усилителя тока и корректность реализованного алгоритма управления. Результат приведен на рисунке 7.
На рисунке 7 изображены три силы, f1 – сила, высчитанная через силу тока, f1(filtr) – сила f1, но отфильтрованная, f2 – сила, которую задавал оператор. Из наблюдения можно сделать вывод, что задаваемая и реализованная силы практически совпадают, погрешность составляет ± 0.0023 Н, что при заданной амплитуде силы ± 5,5 %. Данная
Электромагнитная система компенсации веса погрешность характеризует, что после фильтра сила, высчитанная через ток, содержит в себе артефакты.
4. Экспериментальная отработка
Для экспериментальной оценки работоспособности разработанной системы был собран опытный образец, внешний вид которого представлен на рисунке 8.
К штоку был присоединён груз, и общая масса подвижной части составила 1.98 кг. Также была присоединена пружина с жёсткостью 98.05 Н/м. 245 В результате чего для проверки работы системы обезвешивания был создан простой одноступен-ный осциллятор с собственной частотой 1,12 Гц.
После чего выполнялось сканирование частоты в диапазоне от 1–1.3 Гц, со скоростью 0.01 Гц/мин. Частотная характеристика данного осциллятора, а также аппроксимирующая его прямая представлены на рисунке 9.
Собственная частота осциллятора f 0 равна 1.22 Гц, коэффициент демпфирования а = 0.1. Следовательно, при массе осциллятора 1.98 кг коэффициент вязкого трения c равен 0.396.
Экспериментально полученное значение собственной частоты составило 1.22 Гц, что на 8 % превышает известное значение 1.12 Гц. Данное расхождение может быть обусловлено погрешностью определения зависимости управляющего тока от положения подвижного элемента (рисунок 2), что привело к появлению дополнительной жёсткости в системе обезвешивания. Вследствие этого жёсткость осциллятора увеличилась, что, в свою очередь, вызвало рост резонансной частоты системы.
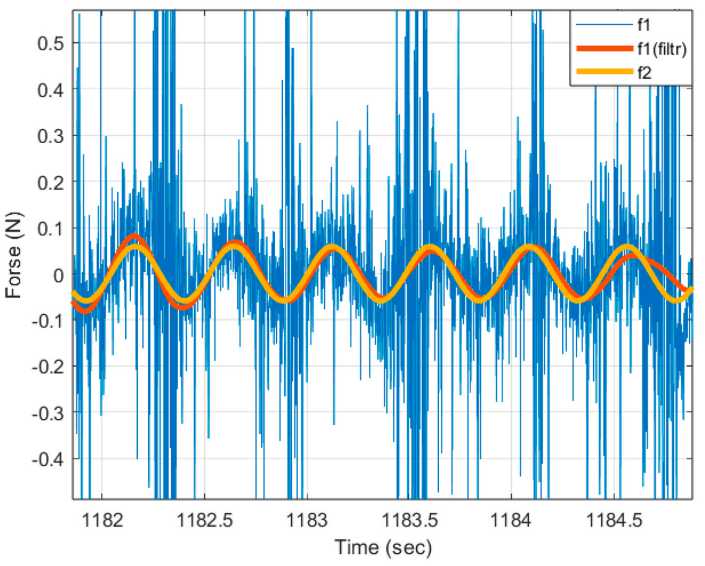

Рисунок 8. Экспериментальный образец
Том 9
Заключение
В настоящей работе представлена разработка и экспериментальная отработка электромагнитной системы активной компенсации веса, предназначенной для создания условий, приближенных к невесомости, при проведении модальных испытаний аэрокосмических конструкций. Система реализована на основе взаимодействия токопроводящей катушки с постоянным магнитом и управляется с помощью замкнутого контура обратной связи с ПИД-регулятором, реализованным на микроконтроллере.
Построена и экспериментально подтверждена зависимость управляющего тока от положения подвижного элемента, что позволило обеспечить высокоточное управление компенсирующей силой по всему диапазону перемещений. Введён режим автоматического масштабирования управляющего сигнала при изменении массы подвижной части, что обеспечило универсальность системы без необходимости перенастройки.
Дополнительно разработан и внедрён усилитель тока, позволивший исключить влияние паразитной ЭДС индукции. Это дало возможность напрямую задавать амплитуду возбуждающей силы и существенно снизить уровень шумов при вычислении динамических характеристик исследуемых конструкций.
Экспериментальная отработка показала, что при использовании усилителя тока задаваемая
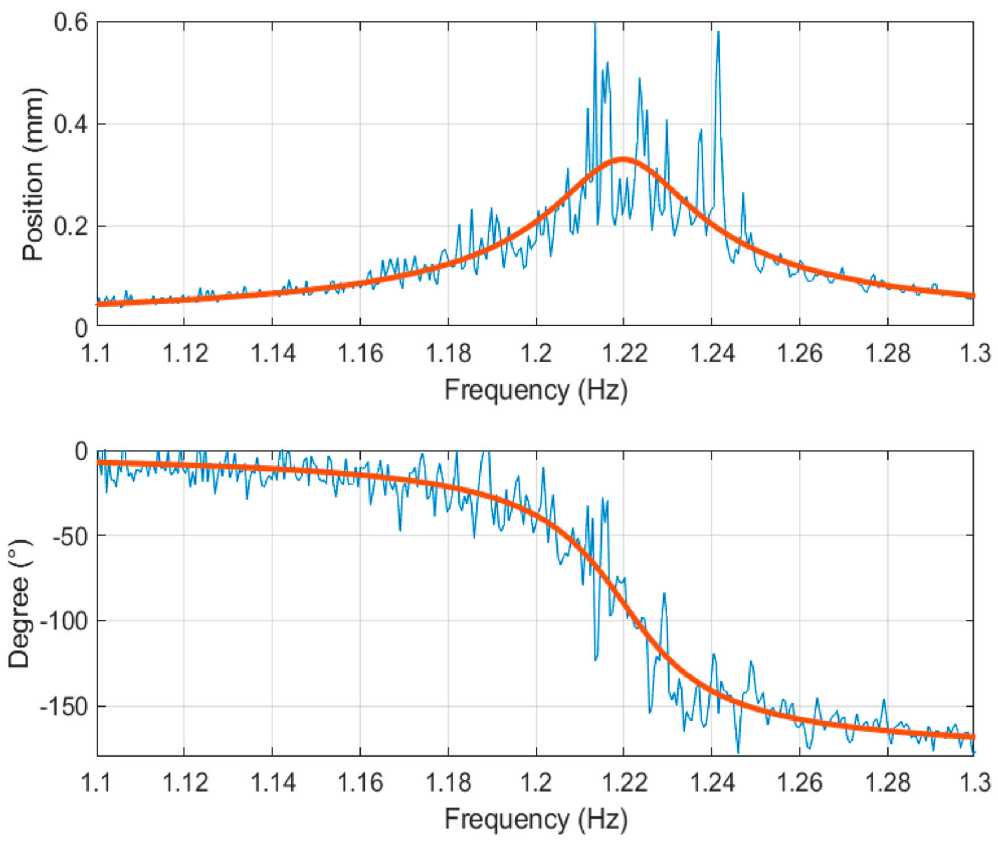
Рисунок 9. Амплитудно-частотная и фазо-частотная характеристики осциллятора
и реализованная силы практически совпадают, погрешность составляет ± 0.0023 Н. Система обезве-шивания имеет коэффициент вязкого трения, равный 0.396, тем самым она практически не будет оказывать демпфирующего воздействия на объект
