Электромагнитное устройство для ориентирования космических аппаратов

Автор: И. П. Попов
Журнал: Космические аппараты и технологии.
Рубрика: Новые материалы и технологии в космической технике
Статья в выпуске: 2, 2022 года.
Бесплатный доступ
Показано, что в основу создания «искусственной» массы, не связанной ни с объемом, ни с плотностью материала, заключенного в искусственно инертном объекте, положено требование удовлетворения второму закону Ньютона. Представляет интерес возможность создания условий для возникновения искусственного момента инерции. Поскольку принцип эквивалентности инертной и гравитационной массы не распространяется на искусственную массу, устройство с искусственной массой может быть несопоставимо легче своего механического аналога с таким же моментом инерции. Это качество делает такое устройство особенно привлекательным для использования в космонавтике в качестве легких маховиков для ориентирования космических аппаратов. Цель исследования состоит в аналитическом синтезировании искусственного момента инерции и установлении определяющих его параметров. Если поместить искусственный электрический маховик в «черный ящик» с выведением вала наружу, то никакими экспериментами невозможно установить, искусственный или «натуральный» маховик находится внутри. Главными преимуществами искусственного или электромагнитного маховика над «натуральным» являются несопоставимо меньший вес и возможность электрического управления его моментом инерции в широких пределах путем изменения магнитного поля (возбуждения) и емкости.
Искусственная масса, искусственный момент инерции, электрический маховик, электромеханический преобразователь, космический аппарат
Короткий адрес: https://sciup.org/14123411
IDR: 14123411 | УДК: 531.36 | DOI: 10.26732/j.st.2022.2.06
Electromagnetic device for spacecraft orientation
It is shown that the basis for the creation of an «artificial» mass which is not related to either the volume or the density of the material contained in an artificially inert object, is the requirement to satisfy Newton's second law. Of interest is the possibility of creating conditions for the emergence of an artificial moment of inertia. Since the principle of equivalence between inertial and gravitational mass does not apply to artificial mass, a device with artificial mass can be incomparably lighter than its mechanical counterpart with the same moment of inertia. This quality makes such a device particularly attractive for use in astronautics as light flywheels for orienting spacecraft. The purpose of the study is to analytically synthesize the artificial moment of inertia and establish the parameters that determine it. If an artificial electric flywheel is placed in a «black box» with the shaft outside, then no experiments can determine whether the artificial or «natural» flywheel is inside. The main advantages of an artificial or electromagnetic flywheel over a «natural» one are incomparably lower weight and the possibility of electrically controlling its moment of inertia over a wide range by changing the magnetic field (excitation) and capacitance.
Текст статьи Электромагнитное устройство для ориентирования космических аппаратов
Момент инерции - это «вращательный аналог» инертной массы, которая, в свою очередь, характеризует способность материального тела ускоряться при оказании на него силового воздействия [1; 2]. Механическая масса тела связана с его объемом и плотностью материала, из которого оно состоит [3]. Механическая (естественная) масса обязательно удовлетворяет второму закону Ньютона.
Последнее обстоятельство положено в основу создания «искусственной» массы, не связанной ни с объемом, ни с плотностью материала, заключенного в искусственно инертном объекте. Речь идет об «электромагнитной» массе [4]. Ее инертность, в том числе, удовлетворение второму закону Ньютона, обусловливается известной инерционностью электромагнитных процессов.
Наиболее распространенными движениями в технике, в том числе, космической, являются вращательные. В этой связи представляет интерес
возможность создания условий для возникновения искусственного момента инерции.
Поскольку принцип эквивалентности инертной и гравитационной массы [5; 6] не распространяется на искусственную массу, устройство с искусственной массой может быть несопоставимо легче своего механического аналога с таким же моментом инерции. Это качество делает такое устройство особенно привлекательным для использования в космонавтике, в том числе, в качестве легких маховиков [7–9].
Цель исследования состоит в аналитическом синтезировании искусственного момента инерции и установлении определяющих его параметров.
-
1. Теория
Одна из известных электромеханических аналогий:
m ⇔ C , (1)
связана с электромагнитным преобразователем. Из этого следует, что устройство с искусственным моментом инерции может включать в себя элек-
(шмчесЬё
АППАРАТЫ И
Том 6
трический конденсатор и электромеханический преобразователь, например, машину постоянного тока (рис. 1 и 2).
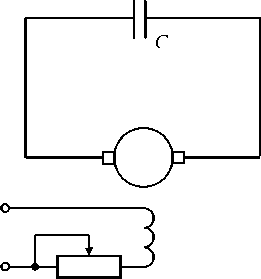
Рис. 1. Принципиальная электрическая схема устройства
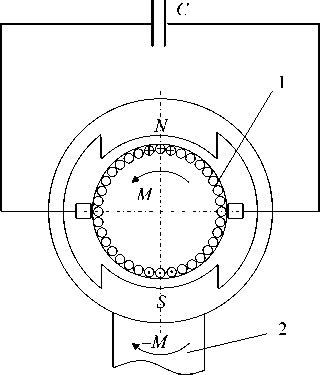
Рис. 2. Макет устройства: 1 – обмотка, 2 – фрагмент управляемого объекта
В генераторном режиме:
-
e, =- B 2 lwDd^ , i 2 dt
где ei – индуцируемая ЭДС, В – магнитная индукция в зазоре, l – активная длина проводника якорной обмотки, w – число витков обмотки, D – эффективный диаметр обмотки, φ – угол поворота ротора. Потери, индуктивность обмотки и собственный момент инерции ротора не учитываются.
Напряжение на зажимах якорной обмотки приложено к конденсатору, поэтому:
BlwDd^ = -\idt, dtC где i – якорный ток.
Дифференцирование равенства дает:
d 2ф 1 .
BlwD = i, dt2 C i = BlwDCd-ф.
dt 2
В двигательном режиме развивается момент:
D 2 .-td ф
M = B2Iw—i = ( BlwD) C—- = J ,(2)
2 ( ) dt2 С dt 2
где J – искусственный или электромагнитный момент инерции.
2. Результаты
Последняя часть полученного преобразования представляет собой вращательный вариант второго закона Ньютона. Из преобразования следует, что:
Jc = ( BlwD ) 2 C .
Таким образом, представленное на рис. 1 и 2 устройство обладает искусственным моментом инерции. В связи с этим оно может использоваться в качестве электрического маховика.
В состав (3) масса (инертная/гравитацион-ная) не входит. Поэтому вес устройства с моментом инерции напрямую не связан.
Из (3) вытекает выражение для искусственной (инертной) электрической емкости [10]:
-
C, =--- J---
- (BlwD )2
-
3. Пример
Пусть В = 1 Тл, l = 0,1 м, w = 10. В качестве конденсатора используется ионистор BCAP3000 емкостью 3000 Ф и массой 0,51 кг.
Из преобразования (2) следует:
d 2 ф T d to
M = Jr —- = Jr —, dL = Mdt = Jrd to ,
C dt 2 C dt C
L = Jcto = (BlwD)2 Cto, где ω – частота вращения, L – момент импульса.
Выражение (3) можно представить в виде:
Jc = ( BlwD ) 2 C = mcR 2.
Отсюда эквивалентная (реактивная) масса равна:
mc = 4 ( Blw ) 2 C = 4 - ( 1 - 0,1 - 10 ) 2 - 3000 = (4)
= 12000 кг.
Эквивалентная масса несопоставима с собственной массой устройства.
Заключение
Существование аналогий между физическими величинами разной физической природы, подобных (1), не приводит автоматически к возможности получения соответствующих функциональных зависимостей типа (3) и (4). Для этого,
И. П. Попов
Электромагнитное устройство для ориентирования космических аппаратов в первую очередь, необходимы технические средства, обеспечивающие согласование размерностей дуальных величин.
Если поместить искусственный электрический маховик в «черный ящик» с выведением вала наружу, то никакими экспериментами невозможно установить, искусственный или «натуральный» маховик находится внутри.
Главными преимуществами искусственного маховика над «натуральным» являются несопоставимо меньший вес и возможность электрического управления моментом инерции в широких пределах путем изменения магнитного поля (возбуждения) и емкости, что создает хорошую перспективу применения его в системах ориентирования космических аппаратов.
Список литературы Электромагнитное устройство для ориентирования космических аппаратов
- Алешин А. К. Метод определения массы и координат центра масс тела в заданной плоскости // Проблемы машиностроения и надежности машин. 2011. № 2. С. 9–14.
- Попов И. П. Уравнение трогания поезда // Известия РАН. Механика твердого тела. 2021. № 2. С. 88–97. doi: 10.31857/S0572329921020148.
- Аввакумов В. Д. Система автоматизированного расчета массово-геометрических характеристик объектов // Сборка в машиностроении, приборостроении. 2008. № 11. С. 38–42.
- Павлов В. Д. Энергетика излучения электрического заряда и ее следствия // Известия Уфимского научного центра РАН. 2021. № 4. С. 5–8. doi: 10.31040/2222-8349-2021-0-4-5-8.
- Океанов Е. Н. Масса тяжелая, масса инертная // Актуальные проблемы современной науки. 2019. № 5 (108). С. 43–44. doi: 10.25633/APSN.2019.05.02.
- Гапочка М. Г., Денисова И. П., Королев А. Ф., Кошелев Н. Н., Эйниев Э. Т. Об измерении отношения гравитационной массы электрона к его инертной массе // Вестник Московского университета. Серия 3: Физика. Астрономия. 2019. № 4. С. 28–31.
- Бабишин В. Д., Дементьев Д. Ю., Мартынов В. С., Михайлов М. А., Некрасов В. В., Соболев Д. Ю., Соседко К. А. Особенности цифрового управления двигателя-маховика АО «Корпорация «ВНИИЭМ» для высокодинамичных космических аппаратов // Космическая техника и технологии. 2019. № 2 (25). С. 107–114. doi: 10.33950/spacetech-2308-7625-2019-2-107-114.
- Акимов И. О. Исследование быстродействия алгоритма управления малогабаритным космическим аппаратом с использованием двигателей-маховиков // Инженерный журнал: наука и инновации. 2019. № 4 (88). С. 8. doi: 10.18698/2308-6033-2019-4-1871.
- Бураков М. В., Криволапчук И. Г., Шишлаков В. Ф., Якимовский Д. О. Нечеткое управление двигателем-маховиком космического аппарата // Гироскопия и навигация. 2019. Т. 27. № 3 (106). С. 119–131. doi: 10.17285/0869-7035.0004.
- Попов И. П. Математическая модель искусственной электрической емкости для снижения пиковой нагрузки маневрового тепловоза // Прикладная математика и вопросы управления. 2019. № 3. С. 57–64. doi: 10.15593/2499-9873/2019.3.03.
