Электромеханический исполнительный орган на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на дисковом статоре для малого космического аппарата

Автор: Баландина Т.Н., Баландин Е.А.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 т.16, 2015 года.
Бесплатный доступ
С появлением космических летательных аппаратов, предназначенных для длительного функционирования в космическом пространстве и требующих постоянной ориентации, стали применяться электромеханические исполнительные органы на базе двигателей-маховиков. Это объясняется тем, что суммарная масса управляющего устройства и эквивалентная масса (в соответствии с потребной мощностью) источника энергоснабжения (например, солнечных батарей) в данном случае не зависят от продолжительности работы электромеханического органа на базе двигателя-маховика. В то же время аналогичная характеристика систем управления с реактивными двигателями увеличивается с ростом продолжительности ориентировочного полета. Кроме того, при этом возрастает потребное количество включений реактивных двигателей, что приводит к снижению надежности системы. Поэтому для космических летательных аппаратов, требующих длительной ориентации, применение систем с двигателями-маховиками оказывается более рациональным. Создание нового электромеханического исполнительного органа на базе управляемого по скорости двигателя-маховика для системы ориентации космического аппарата с улучшенными массогабаритными характеристиками позволит экономить потребителям деньги при запуске космических аппаратов. Требование минимальной массы является одним из главных предъявляемых к электромеханическим исполнительным органам. Целью исследования является расчет параметров и разработка конструкции электромеханического исполнительного органа на базе бесконтактного двигателя постоянного тока с улучшенными массогабаритными характеристиками. Это достигается за счет применения плоского статора, выполненного в виде печатного монтажа, при длине статора цилиндрической формы десятки миллиметров сокращаются до 1,5-2 мм, что влечет уменьшение размеров силовой части корпуса исполнительного органа, а соответственно, и массы всего двигателя-маховика. Предметом исследования является комплекс эксплуатационных характеристик управляемого по скорости двигателя-маховика, обеспечиваемых в процессе разработки двигателя-маховика на базе бесконтактного двигателя постоянного тока с печатной обмоткой на дисковом статоре. Результатом выполненной работы является разработанная конструкция двигателя-маховика на базе бесконтактного двигателя постоянного тока с печатной обмоткой на дисковом статоре.
Электромеханический исполнительный орган, управляемый по скорости двигатель-маховик, космический аппарат, бесконтактный двигатель постоянного тока с печатной обмоткой, кинетический момент, момент управления
Короткий адрес: https://sciup.org/148177390
IDR: 148177390 | УДК: 629.7.054
An electromechanical executive body based on the contactless direct current motor with a winding printing disk stator for small spacecrafts
With the advent of spacecraft designed for long-term operation in space and required constant orientation electromechanical executive bodies on the basis of engine - flywheel began to be applied. It’s happened because total mass of the control device and the equivalent mass (according to the needs power) source of energy (for example solar battery) in this case do not depend on operating period of the electromechanical executive body on the basis of reaction flywheel. At the same time, similar characteristics of control systems with reaction motors increases with the duration of the orientation of the flight. Furthermore, the required amount of inclusions reaction motors that reduces the deterioration of system reliability increases. Therefore, for spacecraft requiring prolonged orientation, application systems with engine-flywheels is more rational. Creating a new electromechanical executive body on the basis of the engine speed managed flywheel system for spacecraft orientation with improved weight and size, will save consumers money when launching spacecraft. The requirement of minimum weight is one of the main imposed on electromechanical executive bodies. The aim of research is to calculate the parameters and develop a design of electromechanical executive body based contactless direct current (DC) motor with improved weight and size characteristics. This is achieved by using a slim stator configured as a printed installation, with the length of the stator cylindrical shape reduced to tens of millimeters of 1,5-2 mm, which involves reducing the size of the power of the valve body, and thus the weight of the entire engine-flywheel. The subject of the research is complex operating characteristics managed by the engine speed - the flywheel provides in the development of the engine-flywheel based on contactless DC motor printed winding on a disk stator. The result of this work is the design of the engine flywheel based on contactless DC motor printed winding on a disk stator.
Текст научной статьи Электромеханический исполнительный орган на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на дисковом статоре для малого космического аппарата
Введение. В настоящее время широкое применение имеют электромеханические исполнительные органы (ЭМИО) на базе двигателей-маховиков. Данный вид ЭМИО обладает меньшей массой и отсутствием динамической ошибки при стабилизации углового положения космического аппарата, чем исполнительные органы (ИО) на базе реактивных двигателей, и более простой конструкцией по отношению к ИО, использующим гиростабилизаторы.
Двигатели-маховики являются инерционными ИО, так как они не требуют отброса массы и управляющие моменты связаны с проявлением инерционных свойств перемещаемых, а точнее, вращающихся тел (маховиков) [1–3].
В настоящее время в ЭМИО космических аппаратов наибольшее применение находят бесконтактные двигатели постоянного тока (БДПТ). Отсутствие щеточно-коллекторного узла у данного вида двигателя увеличивает надежность и долговечность, повышает коэффициент полезного действия. Такой вид электродвигателя может работать в условиях широкого диапазона температур, в вакууме [4].
Объект исследования. Научно-технической новизной данной конструкции является то, что данный тип электродвигателя, по анализу доступных публикаций, не имеет аналогов применения в космической области.
В данной статье рассматривается конструкция ЭМИО на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой (ПО) на статоре, мощностью 5 Вт и напряжением питания 12 В, кинетическим моментом 0,3 Н∙м∙с, угловой скоростью 628 рад/с. Применение плоского статора с печатной обмоткой для ЭМИО является оригинальным новшеством.
Конструкция ЭМИО на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на статоре вместе с блоком управления приведена на рис. 1.
Ротор 2 включает в себя кольцевой магнитопровод из магнитно-мягкого материала, в пазах которого установлены литые постоянные магниты квадратной формы. Крепление постоянных магнитов в пазах маг- нитопровода осуществляется приклеиванием. Поверхности магнитопровода 3 и самих полюсов, образующие торцевой воздушный зазор, тщательно обработаны для обеспечения одинаковых величин зазора магнитной индукции под каждым полюсом. Магнитная система встраивается в основание 5 и диафрагму маховика 15 из немагнитного материала. Через отверстие в основании 5 и корпуса 12 подводятся провода питания (от разъема 28) к трехфазному статору 1, блоку управления 4 и датчикам положения 25, установленным на пластине 16. Статор 1 приклеивается к корпусу 12 и поджимается пластиной 16 при помощи винтов (на рисунке не показано). Блок управления 4 крепится к основанию 5 при помощи шпилек 24. Вся конструкция ЭМИО закрывается верхним 14 и нижним 13 кожухами. Отверстия в кожухах и корпусе заливаются клеем. Для установки ИО на борту малого космического аппарата используются ножки корпуса.
Технической особенностью данного электродвигателя является плоская форма его конструкции за счет применения дискового статора с печатной обмоткой (рис. 2).
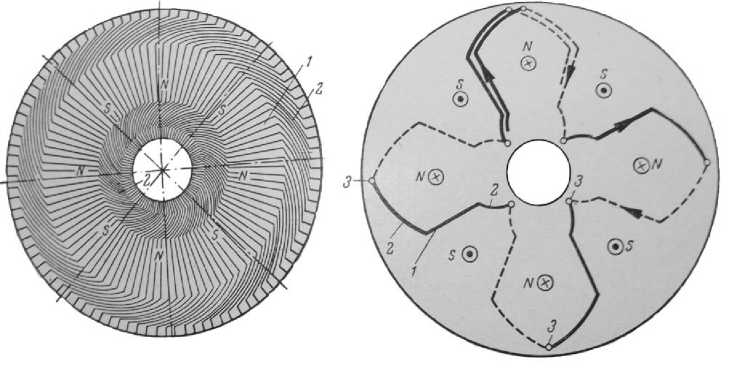
Статор бесконтактного двигателя постоянного тока с печатной обмоткой (рис. 3) представляет собой тонкий диск из механически прочного и нагревостойкого изоляционного материала.
На обеих сторонах диска напечатаны плоские тонкие медные проводники обмотки. Радиальные участки 1 проводников (рис. 3) образуют активную зону обмотки. Изогнутые по эвольвенте части 2 проводников вблизи кромки и центра дискового статора необходимы для соединения активных проводников 1 и называются лобовыми частями обмотки. Лобовые части, напечатанные на противоположных сторонах диска, соединяются между собой через гальванизированные отверстия 3 (гальванические заклепки). На внутреннем диаметре гальванизированные переходы 3 часто располагаются в два ряда в шахматном порядке [5-7 ].
Ниже приведен расчет основных параметров статора с печатной обмоткой и маховика и размеры печатной обмотки дискового статора (рис. 4), где D ср – оптимальный средний диаметр статора.
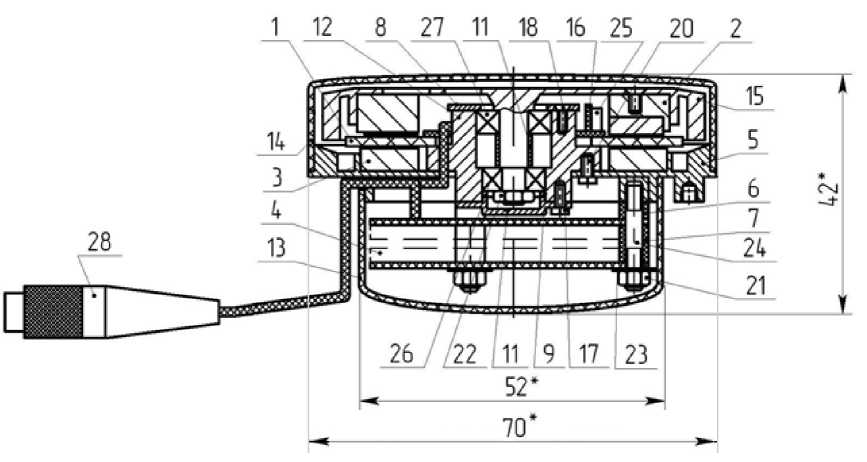
Рис. 1. Конструкция ЭМИО на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на статоре, с блоком управления и его габариты
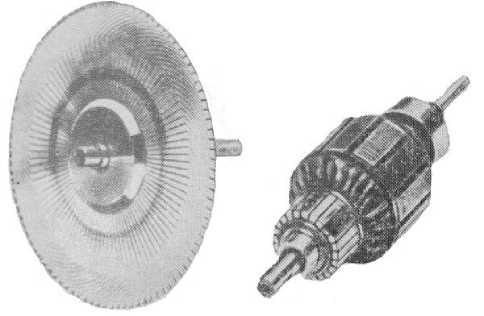
Рис. 2. Печатный дисковый якорь (слева) и якорь обычного исполнения (справа) двигателей постоянного тока одинаковой мощности
б
а
Рис. 3. Схема восьмиполюсной волновой печатной обмотки дискового статора: а – обмотка на диске статора; б – схема соединения печатных проводников на обеих сторонах диска статора
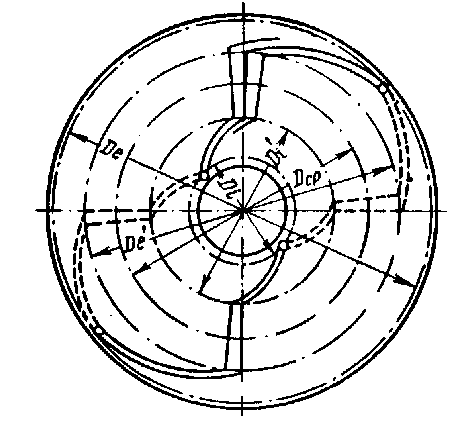
Рис. 4. Размеры печатной обмотки дискового статора
Внутренний диаметр обмотки [7]: D i =
N ■ t я
2 ■ п ■ y
57 ■ 0,074 „ — _ _ -----------= 0,87 см = 8,7 мм, где t„ = 0,074 см = 2 ■ 3,14 ■ 0,77
1,45■Ю - 4 ■ 0,24 9550 ■ 0,5 ■ 10 - 4 ■ 1,26 ■Ю - 9 ■ 0,9 0,3 см = 3 мм.
= 0,74 мм – минимальный шаг печатной обмотки;
Y = 0,77 - отношение минимального шага печатной
обмотки t я к минимальному шагу на внутреннем диаметре t i ; N = 57 — число проводников печатной обмотки.
‘ п ■ Y ■ D
Внешний диаметр обмотки [7]: D e = D e +-- ‘- =
2 ■ Р
= 3 9 + 3,14 ■ 0,77 - 1,9
’ 2 ■ 3
= 4,7 см = 47 мм, где D e = 3,9 см =
= 39 мм – внутренний диаметр внешних лобовых частей (рис. 4). Но исходя из рациональной комплектации всего ЭМИО, приняты следующие значения диаметров обмотки (с сохранением пропорций): внутренний диаметр обмотки 30 мм, внешний 58 мм.
Для данной магнитной системы выбраны неодимовые магниты марки № 35 [8].
Допустимая магнитная индукция магнитов: В с = 1,6 ■ 10 — 4 Тл.
Коэрцитивная сила: Н с = 9550 А/см = 955 А/мм.
Воздушный зазор: 5 = 0,24 см = 2,4 мм.
Момент инерции маховой массы и ротора 2 [9]: J = ” = 628- = 0,00047 кг ■ м 2 . Момент инерции ротора составляет 0,00023 кг∙м2, тогда момент инерции обода маховика равен 0,00024 кг∙м2. Так как размеры маховика выбираются таким образом, чтобы фактический момент инерции был равен или несколько больше требуемого момента инерции, то для дальнейших расчетов принимаем значение момента инерции равное 0,0003 кг∙м2.
Используя выражение момента инерции маховой т П■ Y■ h массы [4] J = —2--(R — r ), где h = 8 мм =
= 0,008 м - высота обода; у = 77500 Н / м 3 - удельная масса материала (сталь марки 14Х17Н2) [10]; R = 34 мм = 0,034 м - наружный радиус маховика;
r – внутренний радиус маховика, м, определим внутренний радиус обода маховика [11]:

2 ■ J п ■ h ■ y
° ■ B cp
Выражение ширины полюса [7]: b =--т = B c
= 4 0,034 4
2 ■ 0,0003
3,14 ■ 0,008 ■ 7500
1,5 ■ 0,5 ■ 10 — 4
1,6 ■ 10 — 4
■ 1,9 = 0,8 см = 8 мм,
где σ – коэффи-
циент рассеяния; В ср = 0,5 ■ 10 4 Тл - средняя индук-
ция в воздушном зазоре [7].
Длина полюса [7]: l m = 0,33 ∙ D ср = 0,33 ∙ 3,6 = = 1,2 см = 12 мм.
Высота полюса [7]:
hm
B r ■ 5
Hc ■ B cp ■ Рл ■ a 5
= 0,03 м = 30 мм.
Основываясь на результатах расчетов основных параметров двигателя-маховика была построена 3D-модель конструкции ЭМИО с помощью программы T-flex CAD 14 ЗАО «Топ Системы» (г. Москва) [12]. Масса 3D-модели обода маховика равна 0,043 кг, масса 3D-модели ротора – 0,055 кг, суммарная масса 3D-моделей ротора и обода маховика составляет 0,098 кг.
Разработанный ЭМИО предназначен для пространственной ориентации и стабилизации положения малого космического аппарата (рис. 5).
Основными компонентами разработанной конструкции исполнительного органа являются: двигатель-маховик, датчики положения ротора, блок управления.
Разработанный исполнительный орган генерирует переменный кинетический момент Н =± 0,3 Н ⋅ м ⋅ с.
Двигатель-маховик включает в себя:
-
1. БДПТ с печатной обмоткой на дисковом статоре, вращающий маховик с переменной угловой скоростью Ω = ± 6000 об/мин.
-
2. Маховик, представляющий собой массивный ротор с явно выраженным ободом.
-
3. Датчики положения ротора, реализованные на датчиках Холла MLX90217 [13].
В таблице приведены основные технические характеристики разработанного ЭМИО с дисковым статором и двух ЭМИО с цилиндрическим статором: производства ОАО «НПЦ «Полюс» (г. Томск) [14] и «СПУТНИКС» (ООО «Спутниковые инновационные космические системы», г. Сколково) [15].
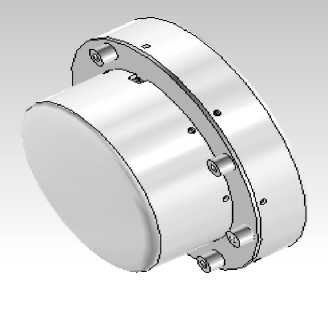
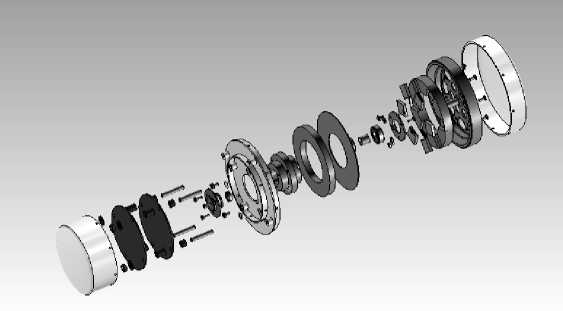
б
Рис. 5. 3D-модель исполнительного органа: а – в собранном виде; б – в разобранном виде
Технические характеристики разработанного ЭМИО, МДМ-0,5 и SX-WH-25
|
Технические параметры |
ЭМИО с ПО |
МДМ-0,5 (ОАО «НПЦ «Полюс») |
SX-WH-25 «Спутникс» |
|
Кинетический момент, Н∙м∙с |
0,3 |
0,5 |
0,25 |
|
Максимальный управляющий момент, Н∙м |
0,013 |
0,015 |
0,0215 |
|
Энергопотребление (ном./макс.), Вт |
0,64/5 |
2/15 |
2,3/23 |
|
Ресурс, лет |
20 |
17 |
– |
|
Масса УДМ/БА, кг |
0,21/0,11 |
1,2/0,4 |
0,3 |
|
Габаритные размеры, мм |
УДМ = 70×21; БА = 52×19 |
– |
84×86×71 |
Заключение. За счет применения плоского статора, выполненного в виде печатного монтажа, при длине статора цилиндрической формы десятки миллиметров сокращаются до 1,5–2 мм, что влечет уменьшение размеров силовой части корпуса исполнительного органа, а соответственно, и массы всего двигателя-маховика.
Анализируя данные таблицы, можно сделать вывод, что разработанная конструкция электромеханического исполнительного органа на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на дисковом статоре при меньшем значении управляющего момента по отношению к рассмотренным ЭМИО имеет следующие преимущества:
-
1) меньшее энергопотребление;
-
2) больший ресурс (по сравнению МДМ-0,5);
-
3) меньшую массу (по сравнению МДМ-0,5);
-
4) меньшие габариты.
Список литературы Электромеханический исполнительный орган на базе бесконтактного электродвигателя постоянного тока с печатной обмоткой на дисковом статоре для малого космического аппарата
- Алексеев К. Б. Управление космическими летательными аппаратами. М.: Машиностроение, 1974. 343 с
- Чеботарев В. Е. Проектирование космических аппаратов систем информационного обеспечения. Кн. 2. Внутреннее проектирование космического аппарата/Сиб. гос. аэрокосмич. ун-т. Красноярск. 2005. 168 с
- Звездин И. А. Малые космические аппараты: перспективы рынка . URL: http://www.telenir.net/transport_i_aviacija/vzlyot_2005_01/p75.php. (дата обращения: 28.10.2013)
- Гладышев Г. Н. Системы управления космическими аппаратами: учеб. пособие. Томск: ТПУ, 2000. 207 с
- Белянин Л. Н. Конструирование печатного узла и печатной платы. Расчет надежности: учеб.-метод. пособие. Томск: ТПУ, 2008. 80 с
- Лунд П. Прецизионные печатные платы: конструирование и производство: пер. с англ. М.: Энергоатомиздат, 1983. 360 с
- Казанский В. М. Малоинерционные электродвигатели постоянного тока с печатной обмоткой на якоре. М.: Энергия, 1965. 96 с
- Неодимовые магниты: свойства и характеристики . URL: http://magnetline.ru/articles/neodimovye-magnity.-svoystva-i-harakteristiki..html (дата обращения: 13.03.2014)
- Дмитриев В. С. Электромеханические исполнительные органы систем ориентации космических аппаратов: учеб. пособие. Ч. 1. Томск: ТПУ, 2013. 208 с
- ГОСТ 5949-75. Сталь сортовая и калиброванная коррозионно-стойкая, жаростойкая и жаропрочная. Технические условия. М.: Изд-во стандартов, 1977. 23 с
- Бритова Ю. А. Исследование вибрационных характеристик электродвигателей-маховиков систем ориентации космических аппаратов. Томск: ТПУ, 2012. 139 с
- Комплекс программных продуктов для автоматизации проектирования . URL: http://www.tflex.ru (дата обращения: 08.09.2013)
- Melexis. MLX90217 Documentation . URL: http://www.melexis.com/Position-Speed-Sensors/Speed-Sensors/MLX90217-3.aspx (дата обращения: 13.02.2014)
- ОАО «НПЦ «Полюс» . URL: http://polus.tomsknet.ru/?id=211(дата обращения: 13.11.2014)
- Спутникс . URL: http://www.sputnix.ru/ru/products/microsatellites-systems/acs-actuators/item/251-adc-wheels/sx_wheels_rus.pdf (дата обращения: 13.11.2014)
