Электромеханическое демпфирование в системах амортизации крупногабаритных объектов

Автор: Хамитов Рустам Нуриманович, Аверьянов Геннадий Сергеевич, Татевосян Андрей Александрович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Технологические процессы и материалы
Статья в выпуске: 1 (34), 2011 года.
Бесплатный доступ
Предложено виброзащитное устройство с электромеханическим демпфером для крупногабаритных объектов с пониженной вибрацией при динамических нагрузках. Виброзащитное устройство на базе электродвигателя рассматрив аетсяк ак электротехнический комплекс. Сформулированы задачи для развития данного направления виброзащиты.
Активная система демпфирования, электромеханический демпфер, пневмоамортизатор, электротехнический комплекс
Короткий адрес: https://sciup.org/148176497
IDR: 148176497 | УДК: 621.313:62-567
Electromechanical damping in vibration protection systems of large-size objects
The authors offer a vibration protection device with electromechanical damper for large-size objects with lowered vibration at dynamic loadings. The vibration protection device on the basis of electric motor is considered as an electrotechnical complex. Problems of development of the given vibration protection direction are formulated.
Текст научной статьи Электромеханическое демпфирование в системах амортизации крупногабаритных объектов
Виброударозащитные устройства (ВЗУ) крупногабаритных объектов содержат амортизаторы различных видов и гидродемпферы [1]. Амортизатор обычно является пневмоамортизатором (ПА) с наличием воздушного демпфирования или без него. Для устранения виброудароп- роводимости и других недостатков гидродемпфера в динамических режимах работы ВЗУ предлагается вместо них применять электромеханический демпфер на базе асинхронной машины (АМ). ВЗУ является комбинированным и содержит ПА, обеспечивающий статическую нагрузку (несущую способность) ВЗУ, и электромагнитный демпфер на базе АМ, работающий только в динамических режимах работы ВЗУ. ВЗУ представляет собой электротехнический комплекс, предназначенный для преобразования механической энергии колебаний амортизируемого объекта (АО) в тепловую энергию, рассеиваемую в роторной цепи АМ, или в электрическую энергию, отдаваемую с помощью обратимых преобразовате-лейв сеть (источник питания) АМ. Для проектирования оптимальных ВЗУ, выбора параметров компенсаторной силы АМ и режима торможения АМ необходимо разработать динамическую модель пневмоэлектромеханичес-кой системы «ПА – демпфер на базе АМ».
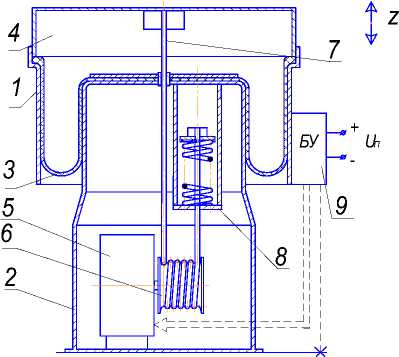
Пример запатентованной конструкции ВЗУ приведен на рис. 1. Блок управления ВЗУ обеспечиваетработу демпфера только в режиме отбоя ПА (одностороннее демпфирование) на основе сигнала преобразователя перемещений. В качестве АМ используется трехфазный асинхронный электродвигатель (АД), работающий на ходе отбоя ПАв режиме торможения противовключением и создающий компенсационную электромагнитную силу [2].
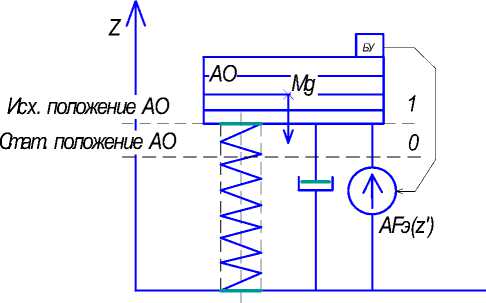
Моделирование пневмоэлектромеханической системы в динамике построим на базе совместного рассмотрения процессов в пневматической, механической и электрической подсистемах, образующих комплекс ВЗУ в целом, на основе расчетной схемы и с учетом известных допущений. Если рассматриваемая одностепенная система (рис. 1, б ) выведена из положения равновесия, то она совершаетсвободные колебания. При этом на систему действуют: сила инерции M ■ Z "; сила тяжести Mg ; сила давления воздуха в объемах ПА (упругая сила); сила трения в резинокордной оболочке (РКО) R ^; компенсаторная сила электромагнитного демпфера АF э.
В общем виде система дифференциальных уравнений движения АО для свободных колебаний запишется в следующем виде:
f dP k ■ P ■ S3 ■ z
-
— =--э—,
dt V + S э ■ z
-
• dz
z= , dt
•
M■ z + (P-P0)■ Sэ + RE ■ signz + АРэ ■ signz = 0, где z , z& , &z& – вертикальные перемещения, скорость и ускорение АО; Р – текущее давление сжатого газа упругого элемента ПА; А – режимный коэффициентэлектро-магнитного демпфера; V0 – начальный объем ПА при статическом положении АО; k – коэффициентадиабаты (для воздуха k = 1,4); М – масса АО; Sэ – эффективная площадь упругого элемента ПА; Ро – давление сжатого воздуха упругого элемента ПА в статическом положении АО; R^- сила трения в РКО.
Сила инерции M ■ z АО создает на валу АМ момент сопротивления М с:
мс = M ■ z- R Б,(2)
где R Б – плечо приложения силы к валу АМ (радиусбарабана).
Компенсаторная сила электромагнитного демпфера Fэ зависитот значения режимного коэффициента А и элек- тромагнитного момента Мэ, создаваемого АД (Fэ = Mэ/R Б):
A -J* при z > 0(3)
[ 0 при z < 0.
В качестве модели электрической подсистемы рассматривалась модель трехфазной обобщенной асинхронной машины [3].
б
Рис. 1. Комбинированное виброзащитное устройство: а – конструкция: 1 – подвижная часть (обойма);
2 – неподвижная часть; 3 – РКО; 4 – пневматический упругий элемент; 5 –АМ; 6 – барабан с тросом; 7 – трос;
8 – устройство натяга троса; 9 – блок управления;
б – расчетная схема динамики
Моделирование процессов в ВЗУ проводилось с помощью программы Мatlab с расширением Simulink. Схема набора приведена на рис. 2.
Результаты решения системы уравнений для одностороннего демпфирования при свободных колебаниях приведены на рис. 3–5 при следующих параметрах ПА и АМ и исходных (начальных) данных:
-
1. ПараметрыПАсРКОИ-10: М =1 500кг; P стат=0,396 ·106Па; K = 1,41; S э=0,03м2; R Б=0,05м; g =9,81м/с2; R £ = 0,01 Mg ; P 0 =0,203 5 • 10 6 Па; V 0 = 0,005 м3; Z 0 = 0,1м; ( dz / dt )0 =0м/с2.
-
2. Параметры АМ: выбранная модель АД из библиотечных моделей – 10НР460V60Hz1760RPM, система координат – вращающаяся, связана с ротором (оси d и q ); Р н=7,46кВт; Rs =0,6837Ом; L 1 s =0,004152Гн; R’r =0,451 Ом; L’ 1 r =0,004152Гн; Lm =0,1486Гн; J =0,05кг·м2; р =2.
-
3. Питающее симметричное трехфазное напряжение АД: U л=380В; f =50Гц.
При расчете модели был выбран неявный метод интегрирования Рунге–Кутта в начале решения и метод, использующий формулы обратного дифференцирования 2-го порядка, в последующем – ode23tb с автоматичес- ким выбором параметров метода. Время переходного процесса tпп определялось по «вхождению» кривой свободных колебаний АО в коридор ±0,01 м.
Таким образом, на базе данной модели возможно оптимизировать режим колебаний управляемых ВЗУ АО, время переходного процесса при применении в качестве
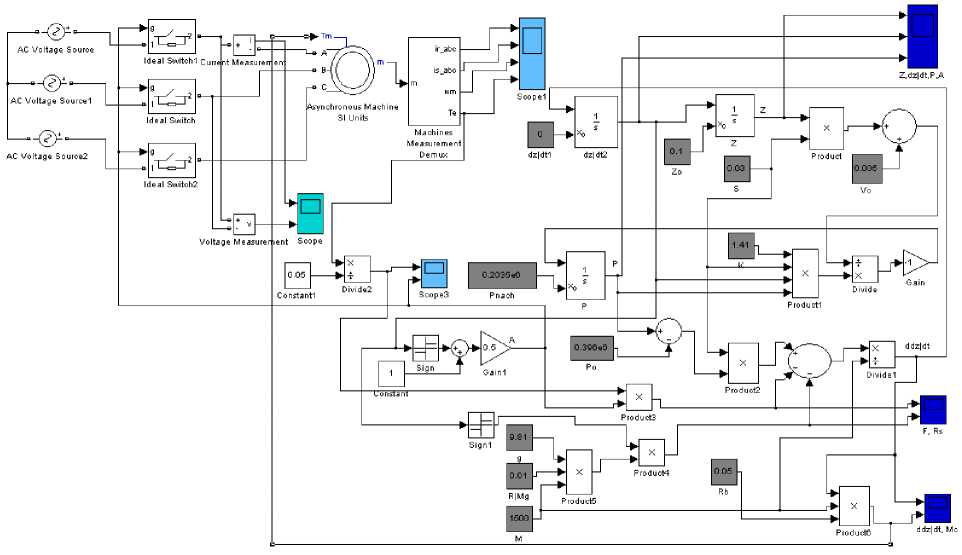
Рис. 2. Имитационная модель ВЗУ
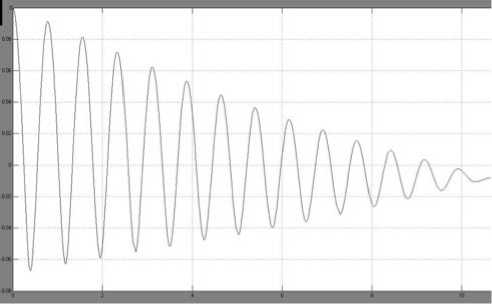
Рис. 3. Свободные колебания АО при отключенном электромеханическом демпфере Z ( t ) ( t пп =10,8c)
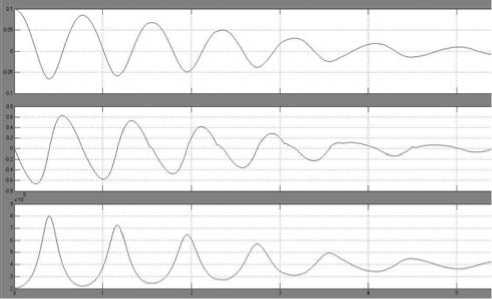
Рис. 4. Свободные колебания АО при включенном одноходовом электромеханическом демпфере Z ( t ) V ( t ) P ( t ) ( t =65c)
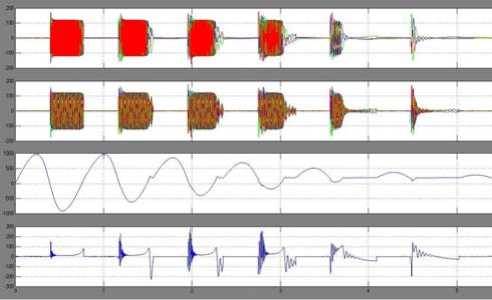
Рис. 5. Осциллограммы основных величин одноходового электромеханического демпфера i rot ( t ), ist ( t ), w ( t ), M э( t ) ( t пп =6,5c)
Р ,кВТ
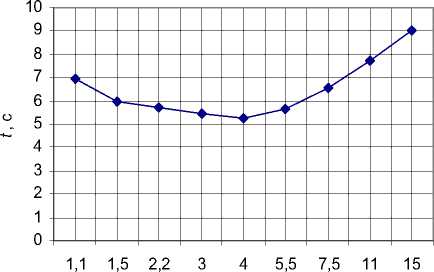
Рис. 6. Зависимость времени переходного процесса отмощности АД
демпфера АМ сократилось практически в два раза, т. е. АМ эффективно использовать в качестве демпфера в конструкциях «длинноходовых» ВЗУ.
При использовании в качестве демпферов АД серии RA производства Ярославского электромеханического завода, различных по мощности, при питании непосредственно от сети расчеты по данной модели показали результаты, приведенные в таблице и на рис. 6. Параметры схемы замещения АД определялись по методике, приведенной в [4]. При питании непосредственно от сети данного ВЗУ видно, что время переходного процесса снижается при росте мощности АД до значения 4 кВт, что является оптимальным значением для данного ВЗУ.
Предлагаемое направление по использованию ЭТК в ударовиброзащите может быть рекомендовано для более детального исследования и внедрения в системах амортизации крупногабаритных объектов. Достоинством использования АД в ВЗУ является их широкая номенклатура по типам, по мощности, по конструктивным исполнениям и т. д. [5; 6], что отвечает разнообразным условиям эксплуатации систем амортизации крупногабаритных объектов, а также дает возможность регулирования их характеристик за счет частотного управления.
