Электропневмогидравлический рулевой привод и принципы его функционирования

Автор: Алилуев Сергей Васильевич, Большаков Александр Афанасьевич, Яшин Алексей Геннадьевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Машиностроение и машиноведение
Статья в выпуске: 1-2 т.19, 2017 года.
Бесплатный доступ
Описывается изготовленный комбинированный рулевой привод для перспективного автономного подводного аппарата, который спроектирован с использованием методов гипервекторного ранжирования, идентификации и моделирования динамических систем. Приведено описание конструкции и порядок работы привода, описаны недостатки, выявленные в результате испытаний.
Системный анализ, комбинированный привод, рулевой привод, автономный подводный аппарат
Короткий адрес: https://sciup.org/148205024
IDR: 148205024 | УДК: 62-88
Electropneumohydraulic steering drive and principles of its functioning
The manufactured combined steering drive for the perspective autonomous underwater vehicle which is designed with use of methods of hyper vector ranging, identification and modeling of dynamic systems is described. The description of design and operating procedure of the drive is provided, the shortcomings revealed as a result of tests are described.
Текст научной статьи Электропневмогидравлический рулевой привод и принципы его функционирования
Разработка автономных подводных аппаратов (АПА) является одним из приоритетных направлений современной робототехники, которое определятся порядком выполнения аварийно-спасательных, обзорно-поисковых, геологоразведочных, научно-исследовательских и других видов работ в океанских и морских зонах мирового океана в ближайшей перспективе. Развитие этого направления во многом зависит от степени совершенства используемых систем автоматического управления АПА и входящих в их состав рулевых приводов. Различным вопросам построения рулевых приводов (РП) посвящено большое число научных работ [1-3]. Однако общий подход к синтезу рулевых приводов АПА, применение методов системного анализа для выбора эффективных вариантов РП АПА, вопросы конструктивного исполнения РП, обеспечивающих установку, торможение и фиксацию органов управления АПА в заданном положении с требуемой точностью, освещены в литературе недостаточно. Решение этих научно-технических задач представляется актуальным.
Предлагаемая общая методика синтеза и построения конструкции РП АПА заключается в следующем.
-
1. Генерирование полного множества вариантов РП.
-
2. Разработка совокупности критериев, описывающих характерные свойства РП.
-
3. Выбор (разработка) метода решения задачи.
-
4. Построение множества эффективных вариантов РП (кортежа Парето) и выбор наилучшего по принятой совокупности критериев варианта РП для последующей реализации.
-
5. Разработка конструкторской документации и изготовление опытных образцов РП.
-
6. Построение математической модели разработанного РП и определение его динамических характеристик.
-
7. Проведение испытаний РП, установление соответствия его параметров требованиям технического задания.
-
8. Оценка адекватности математической модели.
-
9. Внесение необходимой коррекции в конструкторскую документацию.
Пункты 1-4 методики подробно раскрыты в [4]. С точки зрения системного анализа выбор наилучшего варианта РП сводится к задаче гипервекторного ранжирования, метод решения которой изложен в [5]. На основе метода морфологического ящика составлены морфологические таблицы и сгенерировано множество возможных вариантов РП (более 3000), определено множество допустимых вариантов (8 вариантов) и сформирована система критериев для всесторонней оценки РП.
Состав системы критериев: четыре многовекторные компоненты, двадцать три векторных компонент, сорок один скалярных критериев. Выполнены вербальная и математическая постановки задачи гипервекторного ранжирования вариантов РП. Раскрыты особенности решения задач при использовании метода «жёсткого» ранжирования, который содержится в основе метода гипервекторного ранжирования. Решение задачи оказалось реализовано на основе введения псевдозначений векторных и многовекторных компонент [5]. В качестве наилучшего по принятой совокупности критериев выбран комбинированный электропневмогидравлический РП. При выполнении этапов 6-8 использовались, в частности, методы идентификации [6, 7] и моделирования [8, 9] сложных технических систем. Настоящая статья посвящена описанию результатов разработки варианта конструкции выбранного электропневмогидравлического РП АПА.
Особенности конструкции электропнев-могидравлического РП. Конструктивными особенностями электропневмогидравлического РП являются: наличие гидроцилиндра с двумя гидравлическими рабочими камерами; пневмокамеры в виде надувных баллонов, взаимодействующих в противофазе с гидравлическими камерами и сообщённых с использованием распределителей с источником давления и разряжения. На рис. 1, 2 приведены комбинированная схема и трехмерная модель электропневмогидравлического привода, соответственно. Привод включает общую корпусную оболочку 1, в которую входят пневмоцилиндр 2 и гидроцилиндр 3 с камерами 4-7. Камеры представляют внутренние полости, в них установлен единый шток 8 пневмоцилиндра 2 и гидроцилиндра 3. Камеры 4 и 5 –надплунжерные и подплунжерные полости пневмоцилиндра 2, соответственно; камеры 6 и 7 –надплунжерные и подплунжерные полости гидроцилиндра 3, cоответственно. Надплунжерная 6 и подплунжерная 7 полости гидроцилиндра 3 соединены параллельными каналами 9 и 10 для перепуска рабочей жидкости из одной полости 6 в другую полость 7. В канале 9 установлены клапан с пневмоприводом 11 и датчики измерения давления 13, а в канале 10 – электромагнитный клапан 12 и датчик линейного перемещения 14. В каналах подачи воздуха 15 и 16 установлены стравливающие электромагнитные клапаны 17 и 18, а на едином штоке 8 жестко закреплены пневмоплунжер 19 и гидроплунжер 20. Датчик линейного перемещения 14 контролирует линейное положение штока 8. Датчики давления 13 измеряют давление в надплунжерной 6 и подплунжерной 7 полостях гидроцилиндра 3. Датчик линейного перемещения 14 и датчики измерения давления 13 вырабатывают сигналы отрицательной обратной связи.
Принципы функционирования РП. В исходном положении надплунжерные 6 и подплунжерные 7 полости гидроцилиндра 3 , параллельные каналы 9 и 10 заполнены рабочей жидкостью. Электромагнитный клапан 12 работает в режиме широтно-импульсной модуляции, обеспечивающей гидравлическое сопротивление канала 10 . При подаче воздуха в полость 4 пневмоцилиндра 2 через канал 15 открывается стравливающий электромагнитный клапан 17 . Под действием переменное внутреннего давления в полости 4 плунжер 19 пневмоцилиндра 2 совместно со штоком 8 и плунжером 20 гидроцилиндра 3 перемещается вправо. Воздух из подплунжерной полости 5 вытесняется в атмосферу через выключенный стравливающий электромагнитный клапан 18 . Одновременно рабочая жидкость, находящаяся в подплунжерной полости 7 гидроцилиндра 3 , перетекает через открытый клапан с пневмоприводом 11 и электромагнитный клапан 12 по каналу 9 в надплунжерную полость 6 гидроцилиндра 3 . При этом достигается минимальное тормозное усилие на едином штоке 8 , создаваемое гидроцилиндром 3.
При подходе единого штока 8 к заданному положению система управления закрывает клапан с пневмоприводом 11 , рабочая жидкость перетекает из подплунжерной полости 7 гидроцилиндра 3 по каналу 10 через электромагнитный клапан 12 в надплунжерную полость 6 , при этом гидравлическое сопротивление канала 10 возрастает.
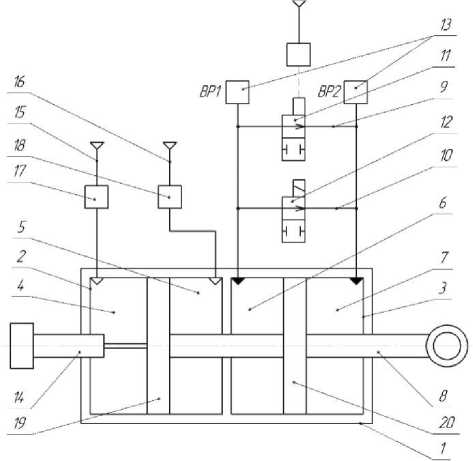
Рис. 1. Комбинированная схема электропневмогид-равлического РП АПА
Расход жидкости через канал резко падает, давление подплунжерной полости 7 гидроцилиндра 3 возрастает до максимального значения, что приводит к резкому торможению единого штока 8 . Для фиксации штока 8 в этом положении выключается стравливающий электромагнитный клапан 17 . Расход жидкости через электромагнитный клапан 12 прекращается, давление в полостях 6 и 7 гидроцилиндра 3 выравнивается, единый шток 8 и рабочий орган фиксируются с высокой точностью, так как рабочая жидкость несжимаема. При перемещении единого штока 8 в обратном направлении работа элементов гидравлического привода аналогична.
При подаче воздуха в полость 5 пневмоцилиндра 2 через магистраль 16 открывается стравливающий электромагнитный клапан 18 , в результате под действием внутреннего давления в полости 5 плунжер 19 пневмоцилиндра 2 совместно со штоком 8 и плунжером 20 гидроцилиндра 3 перемещается влево. Воздух из надплунжерной полости 4 вытесняется в атмосферу через выключенный стравливающий электромагнитный клапан 17 . Одновременно рабочая жидкость из надплунжерной полости 6 гидроцилиндра 3 перетекает через открытый клапан с пневмоприводом 11 по каналу 9 и электромагнитный клапан 12 по каналу 10 в подплунжерную полость 7 гидроцилиндра 3 , при этом достигается минимальное тормозное усилие на штоке 8 .
При подходе штока 8 к заданному положению система управления закрывает клапан с пневмоприводом 11 . Рабочая жидкость перетекает из надплунжерной полости 6 гидроцилиндра 3 через электромагнитный клапан 12 по каналу 10 в подплунжерную полость 7 . Гидравлическое сопротивление канала 10 при работающем в режиме широтно-импульсной модуляции электромагнитном клапане 12 возрастает.
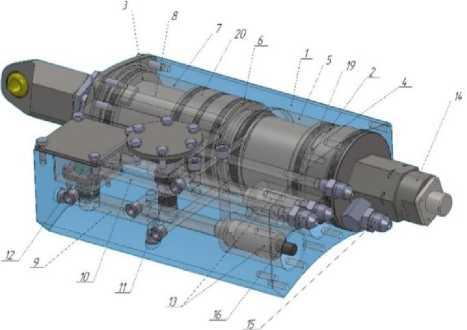
Рис. 2. Трехмерная модель электропневмогидрав-лического РП АПА
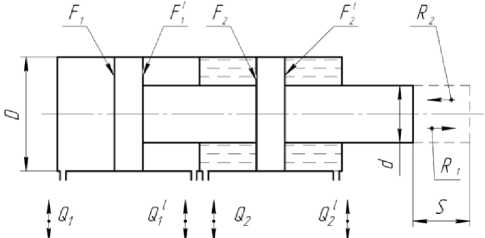
Рис. 4. Основные расчетные характеристики РП АПА

Рис. 3. Опытный образец электропневмогидравли-ческого РП АПА
-
1) определение функции объемного расхода жидкости от объемного расхода воздуха = =
/ (Q i );
-
2) проверка выполнения условий движения плунжера;
-
3) расчет корпуса РП на прочность;
-
4) расчет на прочность и устойчивость штока РП;
-
5) вычисление расходных характеристик гидролиний.
Для вычисления функции объемного расхода жидкости от объемного расхода воздуха величина рабочего хода штока привода S определяется как сумма двух составляющих 51 и 52: 5 = 51 + 52, где 51 - величина рабочего хода штока, при котором тормозное усилие на штоке в гидроцилиндре незначительное, т.е.
F ^dkocmu ^ 0;
Расход жидкости через него резко падает, давление в надплунжерной полости 6 гидроцилиндра 3 возрастает до максимального значения, что приводит к резкому торможению штока 8 . Для фиксации штока 8 в данном положении выключается стравливающий электромагнитный клапан 18 . Расход жидкости через электромагнитный клапан 12 прекращается, давление в полостях 6 и 7 гидроцилиндра 3 становится одинаковым, рабочий орган фиксируется с высокой точностью.
Внешний вид электропневмогидравлическо-го РП представлен на рис. 3. Конструкция предлагаемого РП защищена патентом [10]. Техническая новизна электропневмогидравлического РП заключается в использовании гидроцилиндра в качестве тормозящего элемента. Гидроцилиндр находится на одном валу с пневмоцилиндром, что позволяет реализовать преимущества как пневмо-, так и гидроуправления: отличительной чертой пневмоуправления является быстродействие, а гидроуправления - высокая точность фиксации рабочего органа в заданном положении.
Методика расчета статических характеристик РП. Для расчета характеристик РП определены следующие исходные данные (рис. 4): максимальная глубина погружения АПА; время раскрытия руля; рабочее давление в пневмосистеме АПА; рабочий ход штока РП; усилие на штоке РП. Методика расчета статических характеристик РП состоит из последовательно выполняемых шагов:
где 52 - величина рабочего хода штока, при котором тормозное усилие на штоке в гидроцилиндре велико, однако при этом обеспечивается условие движения плунжера, т.е.
жидкости
< штока
F рулей ,(2)
где F штока - усилие на штоке РП, создаваемое в надплунжерной полости пневмоцилиндра; F рулей - тормозное усилие на штоке РП, создаваемое воздействием набегающего потока воды на рули при движении АПА.
При этом 51 = т114, а 14 = Q1/F1; 52 = т214, а V2 = Q 2/ F 2, где т1, т2 - время перемещения штока, соответственно, на величину рабочего хода 51, 52; 14, 14 - скорость перемещения штока, соответственно, на величину рабочего хода 51, 52; F1, F2 = F‘2 = F' 1 - площадь плунжера, соответственно, в надплунжерной полости пневмоцилиндра, в надплунжерной (подплунжерной) полости гидроцилиндра. Допускается запись 5 = т1 Q1/F1 +т2 Q2/F2, где F 1 = л£> 2 / 4; F 2 = л(Р- - d 2 )/ 4; Т 1 + Т 2 = т -время раскрытия рулей АПА; = - диаметр плунжера РП; d 1 = d 2 > 0,5 х D 1 - диаметр штока РП. Тогда функция объемного расхода жидкости от объемного расхода воздуха имеет вид
= =( - ) ⁄( )․
При этом Qi = 2ΔPi ⁄ Pi , где j»! – коэффициент расхода воздуха в пневмоцилиндре; △ Pl = - p ′ 1 – перепад давления на плунжере пневмоцилиндра; Pl – плотность воздуха; Pl – давление в надплунжерной полости пневмоцилиндра, соответствует рабочему давлению в пневмосистеме АПА; p′ 1 – давление в подплунжерной полости пневмоцилиндра, соответствует давлению во внутреннем пространстве АПА на максимальной глубине погружения H .
Для определения объемного расхода жидкости Q2 подбирается соотношение времен перемещения штока Ti и T2 , которое обеспечивает выполнение условий работы электромагнитного клапана в режимах:
-
- минимальное тормозное усилие на штоке, когда клапан с пневмоприводом открыт, а электромагнитный клапан обеспечивает максимальный объемный расход жидкости Q2 = % , где 012° % – объемный расход жидкости через клапан в режиме 100% скважности;
-
- тормозное усилие на штоке близко к оптимальному для текущего режима эксплуатации АПА, когда клапан с пневмоприводом закрыт, а электромагнитный клапан обеспечивает номинальный объемный расход жидкости Q2 = % , где 012 – объемный расход жидкости через клапан в режиме 50% скважности.
Выполнение условия (1) обеспечивается поддержанием перепада давления на плунжере гидроцилиндра
-
△ P2 = жидкости ⁄ ^2 , где F жидкости → 0.
Выполнение условия (2) обеспечивается поддержанием перепада давления на плунжере гидроцилиндра
-
△ P2 = жидкости ⁄ ^*2 = штока - рулей ⁄ ^2 , где f штока =Δ P1F1 .
Новизна методики расчета статических характеристик РП заключается в следующем:
-
- определен порядок расчета функции объемного расхода жидкости в зависимости от объемного расхода воздуха;
-
- обеспечена двухрежимная работа РП, при которой тормозное усилие на штоке в гидроцилиндре изменяется от незначительного до расчетного значения.
Выводы: с использованием методов системного анализа и гипервекторного ранжирования синтезирован наилучший по совокупности критериев вариант электропневмогидравлического рулевого привода. Разработана конструкция рулевого привода, характеристики которого соответствуют требованиям технического задания. Проведены математическое моделирование и предварительные испытания опытных образцов рулевых приводов, которые показали, что установка рулевого органа АПА в заданное положение и последующая его фиксация осуществляются с высокой точностью во всех режимах эксплуатации. В процессе предварительных испытаний выявлены следующие конструктивные недостатки: масса; высокое давление рабочего тела; повышенная трудоемкость при прокачке привода и наличие «мертвых» зон; большое количество уплотнительных соединений. Недостатки планируется устранить в рамках последующих исследований, которые предполагают, в том числе использование новых методов: гипервекторного перевода сложных технических систем в лидеры [11]; математического и аналогового моделирования динамических систем, описываемых дифференциальными уравнениями высокого порядка [12-14].
Список литературы Электропневмогидравлический рулевой привод и принципы его функционирования
- Петров, Б.И. Динамика следящих приводов: Учеб. пособие для втузов/Б.И. Петров, В.А. Полковников, Л.В. Рабинович и др. -М.: Машиностроение, 1982. 496 с.
- Гамынин, Н.С. Гидравлические приводы летательных аппаратов Учебник для авиационных специальностей вузов/Н.С. Гамынин, В.И. Карев, A.M. Потапов, A.M. Селиванов. -М.: Машиностроение, 1992. 368 с.
- Следящие приводы: В 3-х т. Т.1: Теория и проектирование следящих приводов/под ред. Б. К. Чемоданова. -М.: Изд-во МГТУ им. Н.Э. Баумана, 1999. 904 с.
- Алилуев, С.В. Процедура выбора рулевого привода органов управления автономного подводного аппарата/С.В. Алилуев, А.Л. Балашов, В.А. Поршнев, Д.П. Тетерин//Известия Самарского научного центра Российской академии наук. Т. 18, № 1(2). С. 140-144.
- Воронцов, В.А. Методика выбора эффективных вариантов систем десантирования на планеты солнечной системы/В.А. Воронцов, Г.С. Говоренко, В.В. Малышев, и др.//Вестник НПО им. С.А. Лавочкина. 2014. № 3. С. 116-124.
- Быстров, Л.Г. Методы идентификации динамических характеристик стационарных элементов бортовых систем управления/Л.Г. Быстров, В.С. Дрогайцев, А.А. Попов, Д.П. Тетерин//Вестник Саратовского государственного технического университета. 2009. Т. 4, № 1 (42). С. 65-71.
- Дзюба, О.С. Метод пассивной параметрической идентификации стационарных элементов бортовых систем управления/О.С. Дзюба, В.С. Дрогайцев, Д.П. Тетерин//Труды международного симпозиума «Надежность и качество», 2010. Т. 1. С. 422-424.
- Быстров, Л.Г. Решение линейных дифференциальных уравнений. Аналитико-числовые методы и алгоритмы. Часть 1/Л.Г. Быстров, Г.С. Говоренко, Д.П. Тетерин и др. -М.: Изд-во МГУЛ, 2004. 440 с.
- Тетерин, Д.П. Методы моделирования линейных стационарных элементов систем управления летательных аппаратов//Вестник СГТУ. 2009. №4. Вып. 1. С. 95-100.
- Патент № 114738 РФ, МПК F15B11/072. Пневмогидравлический привод/А.В. Алилуев, С.В. Алилуев, Г.С. Говоренко и др.//Заявл. 23.12.2011; опубл. 10.04.2012. Бюл. № 10.
- Сафронов, В.В. Гипервекторный перевод сложной системы в число лидеров//Информационные технологии. 2005. № 12. С. 20-25.
- Быстров, Л.Г. Исследование динамических систем методом аналогового моделирования/Л.Г. Быстров, Г.С. Говоренко, В.В. Сафронов, Д.П. Тетерин//Труды международного симпозиума «Надежность и качество», 2002. С. 163.
- Дзюба О.С. Моделирование системы управления методом интегральных преобразований/О.С. Дзюба, В.Ф. Перегоедов, Д.П. Тетерин//Мат-лы междун. науч. конф. «Компьютерные науки и информационные технологии», 2009. С. 248.
- Попов, А.Н. Пилотажные комплексы и навигационные системы вертолетов/А.Н. Попов, И.В. Сергушов, Д.П. Тетерин и др. -М.: Инновационное машиностроение, 2017. 368 с.
