Электропривод буровой лебёдки на базе машины двойного питания

Автор: Бабакин В.И., Изотова Е.В., Уляев Р.И., Хисаметдинов Р.А.
Журнал: Академический журнал Западной Сибири @ajws
Рубрика: Науки о земле
Статья в выпуске: 4 (53) т.10, 2014 года.
Бесплатный доступ
Короткий адрес: https://sciup.org/140221393
IDR: 140221393
Текст статьи Электропривод буровой лебёдки на базе машины двойного питания
В настоящее время к техническим устройствам с каждым годом предъявляются всё более строгие (жесткие) требования в области экономичности, стабильности и надежности.
Особенно актуально энергосбережение на предприятиях, удаленных от высоковольтных линий электропередач и использующих дизельные электростанции (ДЭС) в качестве источника питания электроэнергией (например, предприятия Сибири). Причина в том, что в этом случае затраты на энергоресурсы значительно превышают затраты на 1кВТ электроэнергии при питании от линий электропередачи. Схема электроснабжения, рассматриваемой в статье буровой установки (БУ) показана на рис. 1.
Кроме того, для точного соблюдения технологического процесса, необходимо обеспечивать устойчивость. Однако, для выполнения вышеупомянутых требований необходимы значительные капиталовложения на установку нового оборудования. Немаловажно также, чтобы это оборудование обеспечивало системе достаточную надежность.
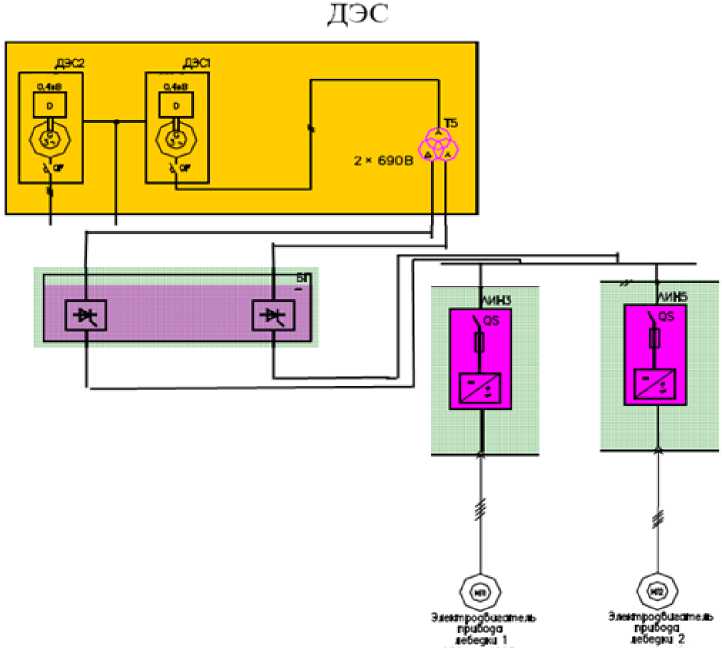
Рис. 1. Схема электроснабжения электродвигателей буровой лебедки от ДЭС.
В статье рассматривается возможность улучшения энергетических показателей БУ при условии обеспечения устойчивой работы и надежности электропривода (ЭП) буровой лебедки.
Чаще всего в качестве электропривода (БУ) в настоящее время применяются две системы: «тиристорный преобразователь – двигатель постоянного тока с независимым возбуждением» (ТП – ДПТ НВ) и «преобразователь частоты – асинхронный двигатель с короткозамкнутым ротором» (ПЧ – АД с КЗР).
В отличие от распространенных систем, в качестве базовой электрической машины электропривода БЛ предлагается использовать асинхронный электродвигатель с фазным ротором (АД с ФР). Со стороны статора АД непосредственно подключен к источнику питания частотой f1=50 Гц , а со стороны ротора к тому же источнику с регулируемой через непосредственный преобразователь частоты (НПЧ) частотой.
Предлагаемый вариант электропривода БЛ представлен на рис. 2.
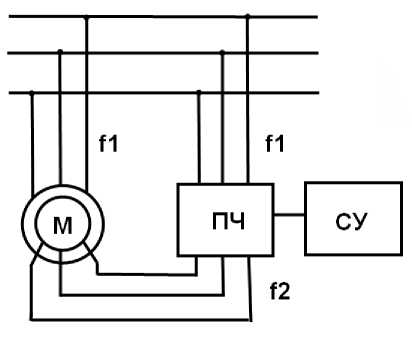
Рис. 2. Структурная схема электропривода
Система управления (СУ) имеет в своём составе фазовращатель, регулятор напряжения, а также датчик частоты вращения ротора. Фазовращатель необходим для изменения соотношения фаз напряжения ротора и статора для осуществления перехода электрической машины из двигательного режима в генераторный и наоборот. Регулятор напряжения нужен для изменения значения напряжения, подводимого к ПЧ, для поддержания постоянства магнитного потока.
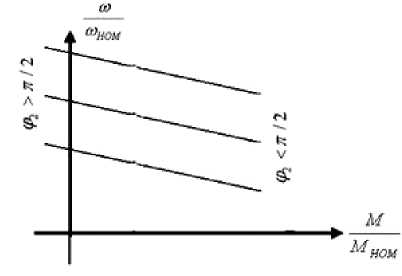
Обмотка статора получает питание от сети с частотой питающего напряжения f1, а к обмотке ротора через преобразователь частоты подводится напряжение с частотой f2 (f2 В машине двойного питания изменением f2 можно регулировать частоту вращения. Частота тока в роторе асинхронной машины f2 = f1*s,(1) s = (n1–n) / n1 n1 - частота вращения магнитного поля. Решая совместно (1) и (2), получаем зависимость частоты вращения ротора n от f1 и f2: n = n1(f1 ± f2) / f1 .(3) Знак плюс соответствует соотношению фаз ПЧ, при котором ротор и его магнитное поле вращаются в противоположных направлениях, а минус – когда они вращаются в одну и ту же сторону. Из (3) следует, что в зависимости от направления вращения магнитного поля ротора можно получить n < n1, или n > n1, Электропривод может работать в одном из трех режимов: 1) Синхронный нерегулируемый – f2=const, при этом машина работает как обычный нерегулируемый синхронный двигатель. 2) Синхронный регулируемый – f2=var, n=F (f2). Оба режима имеют общий недостаток – знакопе-ременность электромагнитного момента, присущий всем электроприводам с синхронными электродвигателями. Как следствие-наличие этого недостатка не обеспечивает устойчивости работе электропривода. Семейства регулировочных характеристик электроприводов, работающих в первых двух режимах представлены на рисунках 3 и 4. *M Рис. 3. Механическая характеристика электропривода в синхронном нерегулируемом режиме при f2 = const. ГР М ДР о<о о>о 2-------------. Рис. 4. Семейство механических характеристик электропривода в синхронном регулируемом режиме при f2=var, n=F ( f2) М 3) . Асинхронный регулируемый режим –f2=var, f2=F(n). В этом случае система управления электроприводом дополнительно снабжается датчиком частоты вращения вала. При этом система становится замкнутой по скорости вращения ротора, что обеспечивает ей коррекцию по величине механической нагрузки и, как следствие, значительно большую, чем в синхронном режиме, устойчивость. Существует также вариант реализации асинхронного режима, который по сравнению с вышеописанным обеспечивает системе значительно большую надежность. Для этого, достаточно заменить датчик частоты вращения ротора датчиком углового положения ротора. Семейство регулировочных характеристик при работе в асинхронном режиме представлено на рис. 5. Рис. 5. Семейство регулировочных характеристик электропривода в асинхронном режиме в относительных единицах Характеристики аналогичны рабочим частям характеристик АД и для лучшего восприятия представлены в относительных единицах. С целью снижения активной мощности преобразователя частоты, которая равна Рпч = (f2 /f1) Рэм (здесь Рэм – электромагнитная мощность), частоту f2 изменяют в небольших пределах. Кроме изменения частоты вращения вала, электропривод на базе асинхронного электродвигателя с фазным ротором с однозвенным преобразователем частоты в цепи ротора, дает возможность работать в режиме компенсации реактивной мощности, благодаря свободному обмену и реактивной мощностями. Машина может работать как с опережающим, так и с отстающим током. Если подводимая к обмотке ротора, добавочная ЭДС Ед совпадает по направлению с индуктированной в ней ЭДС Е2, то в этом случае происходит регулирование частоты вращения ротора. При изменении фазы Ед относительно Е2 одновременно с регулированием частоты вращения изменяется и реактивная мощность, т.е. cos φ. Идея энергосбережения включает в себя три составляющие: • Экономия за счёт применения системы ПЧ – АД, а не ТП – ДПТ, что позволяет экономить до 17% от всей потребляемой электроприводом мощности [1]. • Экономия за счёт применения вентильного каскада , частным случаем которого является электропривод с МДП, а именно за счёт мощности скольжения, запасённой в роторе. Согласно данным литературы, экономия может составлять 18% от полной потребляемой мощности, но на практике не превышает 14% [3]. Уравнение баланса мощностей для асинхронного двигателя с фазным ротором: р Ц- Р -L Р _ ДР = Л *эл • *мех ' *s , где ^5 -мощность скольжения, запасаемая в роторе за счёт разности скоростей ротора и вращающегося магнитного поля (ВМП). Ps = М " (л)0 ■ S 0≤s≤0,14 Ps - 0,14 ■ Рм ^эл = 3 • Уф ■ /ф ■ coscp [3] В таблице 1 приводится сравнение величины потребляемой энергии для систем ТП – ДПТ, ПЧ – АД с КЗР и АД с ФР (с МДП) при 4-х значениях веса на крюке Таблица 1 Мощность, потребляемая двигателями буровой лебедки в режиме спуска КБТ [1] Вес на крюке, кН 60 500 750 1000 Мощность, потребляемая двигателем лебедки, кВт ДПТ НВ 70,4 586,5 723 695 АД с КЗР 40,02 332 575,5 599,4 АД с ФР 32,82 272,24 471,91 491,508 Из таблицы 1 видно, что потребление мощности в предлагаемом варианте электропривода ниже, чем в альтернативных. Причем это проявляется в большей степени при бурении на большую глубину. • Экономия за счёт перехода электропривода на базе АД с ФР (с МДП) из двигательного режима в генераторный при спуске колонны бурильных труб (рекуперативное торможение) [3]. Дело в том, что для этого в предлагаемом варианте электропривода достаточно изменить фазу напряжения, подаваемого на ротор. В таблице 2 приводится сравнение величины рекуперируемой энергии при спуске КБТ для систем ТП – ДПТ, ПЧ – АД с КЗР и АД с ФР (с МДП). Анализируя эти данные, можно сделать вывод, что электропривод с АД с ФР (с МДП) занимает промежуточное положение по этому показателю между ТП-ДПТ и ПЧ-АД при оценке экономичности. Таблица 2 Мощность, рекуперируемая в сеть в режиме спуска КБТ при 4-х значениях веса на крюке Вес на крюке, кН 60 500 750 1000 Мощность, рекуперируемая двигателем лебедки ДПТ НВ -41,4 -554,1 -688,1 -656,3 АД с КЗР -4,0 -284,5 -510 -518,4 АД с ФР -4,72 -335,71 -601,8 -611,712 Сэкономленную энергию предполагается использовать для следующих целей: – обогрев бурового раствора [2]; – обогрев устья скважины и приустьевого оборудования; – отопление жилых и производственных помещений; – питание электродвигателей оборудования для приготовления, очистки и обработки бурового раствора; – освещение; – аккумуляция электроэнергии для создания резерва; – возврат энергии в сеть для уменьшения потребления; топлива дизельными установками (при использовании питания по принципу «Дизельный ДВС – генератор»). К недостаткам предлагаемого электропривода можно отнести склонность к «качанию ротора» в синхронном режиме, аналогичному «качанию ротора» у синхронных машин, что может привести к выпадению из синхронизма [4]. Данный недостаток можно преодолеть путем введения обратной связи по угловому положению ротора. В этом случае вносится коррекция по нагрузке на валу двигателя, а в асинхронном изменяется в зависимости от нагрузки на валу электродвигателя и тем самым реализуется принцип самосинхронизации. Выводы: 1. Электропривод на базе АД с ФР (С МДП) экономичнее в сравнении с приводом на базе АД с КЗР (примерно на 15%),с приводом на базе ДПТ – ТП (примерно на 30%). 2. Устойчивость системы при наличии самосинхронизации сохраняется; 3. Надежность предлагаемой системы практически не уступает альтернативным.
Список литературы Электропривод буровой лебёдки на базе машины двойного питания
- Бабакин В.И., Кондрашова О.Г., Зайдуллин А.Р. Сравнительный анализ энергетической эффективности электроприводов лебедок по системам тиристорный преобразователь -двигатель постоянного тока и преобразователь частоты -асинхронный двигатель. -УГАТУ, 2012 г.
- Бабакин В.И., Кондрашова О.Г., Зайдуллин А.Р. К вопросу об использовании рекуперируемой энергии при спуске колонны бурильных труб. -УГНТУ, 2012 г.
- Бабакин В.И. Курс лекций по дисциплине «Теория электропривода». -УГНТУ, 2011 г.
- Коломойцев К.В. Энергетические возможности машин двойного питания//Электрик. -2008. -№ 5. -С. 48.
