Электропривод пружинный для борьбы с гололедом воздушных линий

Автор: Исмагилов Флюр Рашитович, Янгиров Ильгиз Флюсович, Максудов Денис Вилевич, Каланов Харис Халилович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 2 т.17, 2017 года.
Бесплатный доступ
Разработана оригинальная многофункциональная конструкция электропружинного двигателя (ЭПРД). Создана математическая модель ЭПРД, получены выражения для определения силовых приводных характеристик и чувствительности в зависимости от геометрических размеров и магнитных характеристик. Разработанная конструкция ЭПРД экономична, технологична и проста в эксплуатации относительно известных устройств по борьбе с гололедом воздушных линий (ВЛ).
Гололед, воздушная линия, математическая модель, пружина, электропривод
Короткий адрес: https://sciup.org/147158398
IDR: 147158398 | УДК: 531.768 | DOI: 10.14529/power170204
Electric spring drive for fight against ice-covered air lines
The original multifunctional EPRD design was developed. A mathematical model of the EPRP was created, expressions were obtained for determining the power drive characteristics and sensitivity depending on the geometric dimensions and magnetic characteristics. The developed design of the EPRP is economical, technological and easy to operate with respect to the known anti-ice devices for overhead lines.
Текст научной статьи Электропривод пружинный для борьбы с гололедом воздушных линий
В работе рассматривается один из вариантов борьбы с гололедом воздушных линий (ВЛ) в виде электромеханического устройства. Эта проблема является актуальной проблемой в современной энергетике.
Решение задачи
Электропружинный двигатель (ЭПРД) (см. рисунок) содержит полый корпус 1, внутри которого имеется ось 5 по всей длине корпуса. На ось свободно одеты инерционное кольцо 4 с возможностью перемещения вдоль нее, а также электропроводящая цилиндрическая пружина 3, которая одним концом жестко закреплена на головке корпуса, а другим связана с кольцом. В головке корпуса установлены блоки питания и управления 2,
имеющие автономное питание с целью создания импульсного напряжения. При получении импульса напряжения по электропроводящей пружине протекает ток, причем имеющий одинаковые направления в соседних ветвях. Между витками возникает притягивающая электродинамическая сила, вследствие чего пружина сжимается. Когда импульс тока равен нулю, пружина разжимается с кольцом и на корпус двигателя действует импульс реактивной движущейся силы. Дальше процесс повторяется и движение двигателя стабилизируется. Конструкция проста, надежна, удобна в эксплуатации. Такой двигатель найдет в перспективе в современной энергетике. Двигатели такой конструкции найдут широкое также применение в дви-гателестроении, машиностроении, приборостроении, медицине.
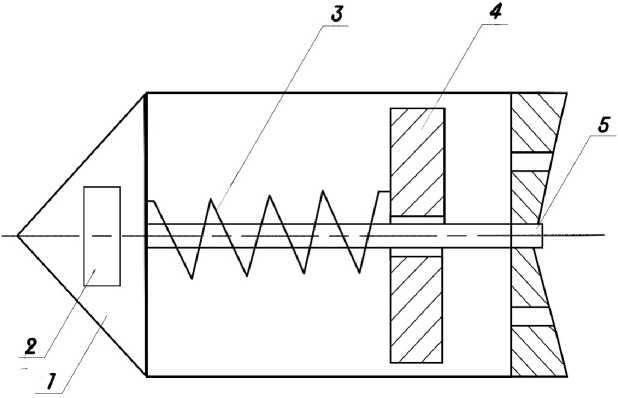
Рис. 1. Электропружинный двигатель
Электроэнергетика
Математическая модель ЭПРД выглядит следующим образом:
d 2 Sw d rw2
2 sw dtw
1 d Sw
+ — x-w rw d rw
2 sw rw 2
, 1 -ц 2 S 2 s w = P--- x — w ,
E d t
d s
+ 2 n Ex — +®0 Sw d t
= - 2 n A вх sin ю t x s w (1) +
+ <
i 2 ( "2"
VL
dL 0 w + 2 NN dM 0 w , n
Z Z
dL 0 w 1 1 dr 0 w
ew = Bо lw + iR + di d t dr
N
N
NN
+ TKl ■ 2У Тк Lw
NN
Z L 0 w + 2 ZZ M 0 w , n
( N
+i I Z KLw V 1
di
iR +-- dr
N
NN ddw+2ZZ к
NN
- dS w )
Mw , n i, I , , dt J
di
+— dt
Mw , n
-J
( N
+ B 0 il
s w ,
NN
Z K Lw S w + ZZ K мw , n S w I +
Z L о w + 2 ZZ M о w , n
di
+— dt
N
NN
Z K tw S w + ZZ Kmw , n S w
( N ds NN ds )
+ i У к^—- + 2 У У Kмwn—w ,
I Z dt ZZ Mw , n dt J ,
s w L = 0,
| rw = '0
s w = N L = 1, rw = r 0
где sw - радиальное перемещение w -го витка спирали; E - модуль упругости первого рода; ц - коэффициент Пуассона; n E - коэффициенты трения и демпфирования; ю 0 - частота собственных колебаний; ю - частота вынужденных колебаний; rw ‒ радиус w -го витка; lw ‒ длина участка витка; B 0 ‒ индукция магнитного поля; sw (1) ‒ форма колебаний спирали магнитного поля; R ‒ активное сопротивление спирали; e ( t ) ‒ подводимое напряжение; L 0 w и M 0 w ‒ индуктивность и взаимоиндуктивность спирали в статическом состоянии; KL 0 w , KMin ‒ некоторые конструктивные постоянные.
Система дифференциальных уравнений с переменными коэффициентами представляет собой математическую модель обобщенной конструкции ЭПРД с пружинным вторичным элементом и позволяет исследовать характеристики ЭПРД.
В случае подключения электропроводящей механической пружины к синусоидальному источнику тока i = I m sinω t поставленная задача упрощается и выкладки становятся более наглядными. При этом уравнение колебания точки приведения системы будет иметь вид
x + 2 n Ex + ю0 x =
= Z S w (1) ^
Im 2 2
Z dL ». + 2 Z dM »^ I+I Z K L, + 2 ZZ к м,., dr 0w dr 0 w J V
sin 2 ю t + B0I m l sin ю t > .
Решение полученного уравнения находится как сумма решений вида:
z sw (1) im x1 =--------T"
4 M пр ю 0
(у dhow + 2 у dM Ну к + 2у у к LVZ dr,w Z ar,w J Vz w ZZ n
,
x 2 =
z s w, (1) i m
4 M ^Va - 4 q 2 ) + 16 D 2 q 2
dM 0 w dr 0 w
+ 2 у dM Ow У Гу к 2 у у к
Vw V wn dr0 w J V
cos ( 2 ю t + ф 2 ) , (3)
Zv S w (1) I m B 0 l / \
x 3 =-------- , - sin ( ю t + Ф з ) .
m пр ю 07 (1 - q 2 ) 2 + 4 d 2 q 2
Суммарное результирующее усилие, развиваемое пружинным ЭПРД в режиме вибродвигателя, находится из второго закона Ньютона [1, 2] как произведение приведенной массы на ускорение точки приведения системы
A
F M пр
V
d 2 x 1 + d 2 x 2 dt 2 dt 2
d 2 x
+----:
dt
J
.
Исмагилов Ф.Р., Янгиров И.Ф., Максудов Д.В., Каланов Х.Х.
Общая формула для расчета характеристики электропружинного двигателя к to2y m
F s — s sw (1) ^
to o
—
dl^w + 2У ydMw Uy K + 2 у ук lw мwn dr0w drow J V
7 (1 — 4 q 2 ) + 16 D 2 qq . I m B0 sin ( 2 to t + Ф3)
7 (1 — q 2 ) 2 + 4 D 2 q 2 ' '
- cos ( 2 to t + Ф 3 )
—
.
Из полученного выражения видно, что электродинамическое усилие двигателя представляет собой сумму сил с частотой питающего источника и двойной частотой источника. ЭПРД с пружинным вторичным элементом представляет также интерес как генератор низкочастотных колебаний, поэтому необходимо, чтобы выполнялось неравенство F S (2 to ) ^^ F S M ( to ) для исключения нежелательные вибрации с двойной частотой.
Этого можно добиться исключительно варьированием геометрических размеров пружины – шага витка, поперечных размеров, а также увеличением индукции первичного магнитного поля. В случае необходимости генерации колебаний двойной частоты необходимо исключить постоянное магнитное поле. Из этих соображений усилие, развиваемое электропружинным двигателем, находится в общем случае из соотношения
F S M
-
= I m B 0 l ^ , S uw " ' sin (to t + ^ .
to 0 7(1 — q 2 ) 2 + 4 d 2 qq
Необходимо рассмотреть предельные частные случаи для режима двигателя.
-
1. Аргумент функции Бесселя бесконечно малая величина. В этом случае соотношение для действую-
- щего усилия имеет вид
17-^ Г Д / R 1 R 0 V1 — Y0 qq
F = ImB01/
-
2 R 0 — Y 0 R 1 w = 1 Y W J (1 — q 2 ) 2 + 4 D 2 q 2
или переходя к геометрическим размерам
N2 22
f-2± t r i R 0 У r w r 0 q_______
F ImB0l 2 2 ^.
-
2 R 0 — r 0 w = 1 r w 7(1 — q 2 ) 2 + 4 d 2 q2
2. Аргумент функции Бесселя бесконечно большая величина. Действующее усилие в этом случае
„ V2 _ .
F = — ImBol
2 m 0
E sin ^ 1 0 Y
w
—
q 2
. f l0R n) f l0R0 n) 1(1-a2)2 +4D2a2
sin -°-0- — — A cos ' — W q ) + 4 Dq
V R 1 4 J V R 1 4 J
и для двухвитковой пружинной машины с бесконечно большими геометрическими размерами
F
V2 _ .
= —ImBol
2 m 0
— q 2 ) 2 + 4 D 2 qq
что совпадает с формулой, полученной ранее для расчета классических электрических машин в режиме вибрационных колебании с линейными геометрическими размерами [3, 4].
В соответствии с законом Ампера
2 n INBr = F S , (12)
где N – число витков пружины; r – радиус витка пружины; B – индукция в пружине; I – ток в витках пружинного привода. Магнитная индукция, создаваемая в пружине, определяется выражением
B =
Fs
2 n IVr
а сила тока в витках механической пружины
I = U вх
7R2 + w 2 1 2 ,
где R – активное сопротивление цилиндрической пружины; U вх – напряжение источника питания. При подстановке (14) в (13)
R P 7R27 w¥
B = Fy--------
S 2nNUBX вх
.
Электроэнергетика
Чувствительность ЭПРД e=dB. (16)
dt
Малое перемещение ЭПРД за один такт работы F kx = F ^ x = 5 = — , (17)
k где k – жесткость пружины
Время перемещения ЭПРД по воздушной линии за один такт at2 2S
S = — ^ t = —, (18)
2a из Fs = (M + m) a ускорение перемещения a =
Fs ,
M + m ’
где М – масса установки; m – масса инерционного элемента.
Время работы пружинного привода
1 2 ( M + m )
t = \ k ’ а скорость движения ЭПРД по ВЛ
9 = F — ---?.
k ( M + m )
Таким образом, получены все необходимые соотношения для проектирования ЭПРД по техническим требованиям испытуемого объекта.
Выводы
-
1. Разработана оригинальная многофункциональная конструкция ЭПРД.
-
2. Создана математическая модель ЭПРД, получены выражения для определения силовых приводных характеристик и чувствительности в зависимости от геометрических размеров и магнитных характеристик.
-
3. Разработанная конструкция ЭПРД экономична, технологична и проста в эксплуатации относительно известных устройств по борьбе с гололедом ВЛ.
Список литературы Электропривод пружинный для борьбы с гололедом воздушных линий
- Герасимов, В.Г. Методы и приборы электромагнитного контроля промышленных изделий/В.Г. Герасимов, В.В. Клюев, В.Е. Шатерников. -М.: Энергоатомиздат, 1983. -265 с.
- Пат. 2028835 Российская Федерация. Устройство для возбуждения крутильных колебаний/И.Х. Хайруллин, И.Ф. Янгиров, Ф.Р. Исмагилов, Т.И. Хайруллин. -Опубл. 20.02.1995, Бюл. № 5. -3 с.
- Янгиров, И.Ф. Электромеханические преобразователи/И.Ф. Янгиров. -М.: Машиностроитель, 2005. -№ 8. -С. 14-15.
- Янгиров, И.Ф. Датчик перемещений и ускорений/И.Ф. Янгиров//Изобретатели машиностроению. -2002. -№ 1. -С. 46.
