Электропривод с устройством косвенного контроля выходных координат асинхронного двигателя

Автор: Дементьев Юрий Николаевич, Гончаров Валерий Иванович, Негодин Кирилл Николаевич, Умурзакова Анара Даукеновна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханические системы
Статья в выпуске: 4 т.17, 2017 года.
Бесплатный доступ
Приведены аналитические выражения для математического описания способов косвенного контроля момента и угловой скорости асинхронного двигателя (АД) с помощью устройства косвенного контроля, позволяющие с заданной точностью рассчитать значения электромагнитного момента и угловой скорости АД и проводить их непрерывный контроль для обеспечения заданных технологических параметров в различных режимах работы общепромышленных механизмов. Приведены блок-схемы устройства косвенного контроля выходных механических переменных АД, реализованные на математическом описании способов расчета электромагнитного момента и угловой скорости АД, с различной точностью. Представлены результаты экспериментальных исследований, подтверждающие правильность предложенного математического описания способов косвенного контроля выходных механических координат асинхронного двигателя с помощью устройства косвенного контроля для асинхронных электроприводов общепромышленных механизмов с частотным управлением.
Асинхронный двигатель, электропривод, косвенный контроль, момент, угловая скорость
Короткий адрес: https://sciup.org/147158431
IDR: 147158431 | УДК: 621.313 | DOI: 10.14529/power170411
Study of electric drive with indirect control of output mechanical variables of asynchronous motor
The article describes the analytic dependences of mathematical description of indirect control of an asynchronous motor’s electromagnetic torque and angular velocity methods with a device of indirect control of the output mechanical variables. These dependences allow us to calculate the values of electromagnetic torque and angular velocity of asynchronous motor and to provide its continuous control to guarantee the given technological parameters in different operation modes of industrial mechanisms. The paper provides the block diagrams of indirect control device of output induction motor mechanical variables that are realized by means of a mathematical description of calculation method of electromagnetic torque and angular velocity with different accuracy. The experimental research results are shown. These results approve the validity of the suggested mathematical description for the indirect control of output mechanical variables of asynchronous motor methods with a device of indirect control device for asynchronous motor of industrial mechanisms with frequency control.
Текст научной статьи Электропривод с устройством косвенного контроля выходных координат асинхронного двигателя
В настоящее время около половины вырабатываемой электроэнергии потребляется нерегулируемыми асинхронными двигателями с короткозамкнутым ротором (АД). Рабочими механизмами асинхронных электроприводов являются: подъемники горной и металлургической промышленности, вентиляторы, насосы, газодувки, компрессоры горной, металлургической, химической промышленности, атомной энергетики, для которых важно регулировать частоту вращения вала двигателя и развиваемый момент либо технологический параметр [1–4]. Необходимость регулирования момента и скорости диктуется предъявляемыми к электроприводу техническими и технологическими требованиями. Для обеспечения заданных технологических параметров многих производственных механизмов и их нормального функционирования в различных режимах работы требуется непрерывный контроль момента и угловой скорости.
Следует отметить, что, например, применение датчиков скорости вращения для контроля угловой скорости АД в электроприводе позволяет получить качественный и сравнительно простой способ контроля частоты вращения электродвигателя, но наличие этих датчиков существенно ухудшает эксплуатационные характеристики электропривода, а их использование может быть невозможным по условиям функционирования электропривода [5–9].
В связи с этим промышленными предприятиями широко востребованы устройства и методы, позволяющие косвенно осуществлять контроль скорости в заданных пределах при отсутствии датчиков скорости, а также проводить непре- рывный контроль и мониторинг величины момента в целях ограничения динамических ударных нагрузок и определения загруженности двигателей. При этом выходная координата, которую контролируют, определяется косвенно через электрические переменные, определяемые достаточно простыми известными способами [10–12].
Таким образом, целью статьи является исследование асинхронного электропривода с устройством косвенного контроля (УКК) выходных координат асинхронного электродвигателя.
Постановка задачи
Для математического описания способа косвенного контроля выходных координат АД с помощью устройства косвенного контроля (УКК) можно воспользоваться нижеследующими выражениями, согласно которым возможно осуществлять контроль момента и угловой скорости АД по каталожным данным двигателя и легко измеряемым величинам [13–14]:
М ( t ) = V3 ■ P n ■ [ i a (t ) ■ J [ u b (t ) - R s ■ ib (t ) ] dt -
' - i b ( t ) -J [ u a ( t ) - R s ■ i a ( t ) ] dt ] ;
®( t ) = ® и ( t ) ■ [ 1 + А ® инт ( t ) + А Ю диф ( t ) ] .
В соответствии с этими выражениями на рис. 1 представлена блок-схема устройства косвенного контроля электромагнитного момента и угловой скорости АД [15–20].
Как видно из рис. 1, выходные координаты, момент и угловая скорость АД определяются путем измерения напряжений, токов фаз статора и каталожных данных электродвигателя с последующим определением момента и угловой скорости в соот-
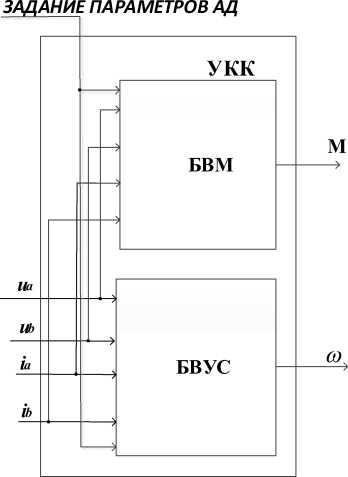
Рис. 1. Блок-схема устройства косвенного контроля выходных механических переменных АД
ЗАДАНИЕ ПАРАМЕТРОВ АД
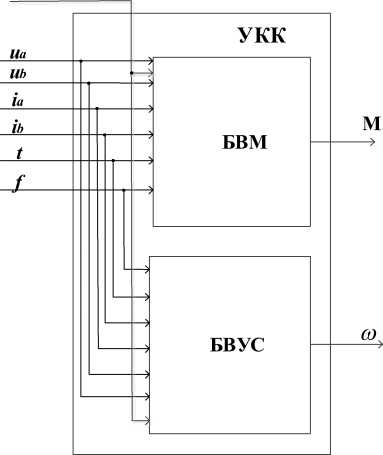
Рис. 2. Блок-схема устройства косвенного контроля выходных механических переменных АД
ветствующих блоках вычисления момента (БВМ) и скорости (БВУС) УКК, тем самым обеспечивая контроль их текущих значений [11–12].
Для повышения точности контроля выходных переменных АД в математическое описание вышеприведенного способа косвенного контроля с помощью УКК вводятся дополнительные перемен- ные, позволяющие учитывать температуру проводников обмотки статора, частоту основной гармоники напряжения статора, температурный коэффициент, зависящий от материала проводника.
Математическое описание способа косвенно- го контроля электромагнитного момента и угловой скорости АД для этого случая может быть представлено в следующем виде:
М ( t ) = Л ■ pn ■
1/f ia (t) ■ J [ ub (t) - z ■ ib (t) ] dt -
1/ f "
<- i b ( t) ■ J [ u a ( t) - z ■ i a ( t) ] dt ;
0 J to(t) = ®и (t ) ■ [1 + А®инт (t) + ДЮдиф (t) J, где f – частота основной гармоники напряжения питания;
z = R s -[ 1 + a t ■ ( t пр - 20 ) J - активное сопротивление обмотки статора с учетом температурного коэффициента a t ;
a t - температурный коэффициент, характеризующий свойства проводников обмотки статора;
t пр – температура проводников обмотки статора.
На рис. 2 в соответствии с вышеприведенными выражениями представлена блок-схема устройства косвенного контроля выходных координат АД, в которой учитывается температура проводников обмотки статора, частота основной гармоники напряжения статора, температурный коэффициент, зависящий от материала проводника.
Отличительной особенностью блоков БВМ и БВУС (см. рис. 2) от аналогичных блоков (см. рис. 1) является наличие в них блоков вычисления сопротивления обмотки статора с учетом температурного коэффициента и блока вычисления периода.
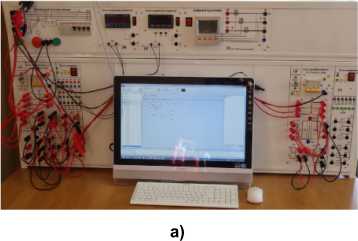
Рис. 3. Общий вид экспериментального стенда: а – электрический стенд; б – электромеханический стенд

б)
Экспериментальное исследование
С целью количественного и качественного подтверждения расчетных соотношений и проверки разработанных способов косвенного контроля выходных переменных АД в лаборатории кафедры электропривода и электрооборудования были проведены экспериментальные исследования на специальном лабораторном стенде, общий вид которого приведен на рис. 3.
Лабораторная экспериментальная установка включает в себя:
– стенд электрический, смонтированный на столе;
– стенд электромеханический нагрузочный (агрегат).
Стенд электрический содержит:
-
– преобразователь напряжения (блок питания) двигателя постоянного тока;
-
– преобразователь частоты (блок питания) асинхронного двигателя;
-
– блок тормозных резисторов;
-
– блок фильтра;
-
– блоки электрических измерений (2 шт.) для двигателя постоянного тока и асинхронного двигателя;
-
– блок цифровой индикации крутящего момента силы и скорости вращения;
-
– моноблок с диагональю экрана 18,5 или 21,5”.
Стенд электромеханический нагрузочный содержит:
-
– электрическую машину постоянного тока;
-
– электрическую машину переменного тока (асинхронный электродвигатель – АИР71В2У3 мощностью P н = 1,1 кВт, с номинальной частотой вращения n н = 3000 об/мин);
-
– датчик крутящего момента силы типа TRB;
-
– инкрементный датчик обратной связи.
Экспериментальный стенд предусматривает возможность работы обеих машин в режиме двигателя и генератора. Для обеих машин использованы преобразователи, позволяющие реализовать режим динамического торможения (со сбросом энергии на тормозной резистор).
Преобразователи имеют возможность программирования в среде блочного программирова- ния с изменением структуры и параметров системы управления электроприводом. Также преобразователи имеют возможность управления по стандартным аналоговым и цифровым интерфейсам (RS-485 и RS-232).
Стенд содержит специальные автоматы для подачи напряжения питания. На блоках предусмотрены выводы для обеспечения возможности измерения токов, напряжений, мощности на входе и выходе преобразователя. Частично использован скрытый монтаж силовых соединений. Кроме того, предусмотрена возможность работы на стенде в двух режимах: ручное управление; автоматическое управление от персонального компьютера (ПК).
Блоки электрических измерений обеспечивают расчет мощности, тока, напряжения и других электрических величин с возможностью вывода информации на компьютер.
Силовые цепи недоступны для случайного касания, также предусмотрена автоматическая защита по превышению тока. Вращающиеся части недоступны для случайного касания, но имеется возможность визуального наблюдения положения вала.
Встроенное программное обеспечение дает возможность изменять структуры и параметры программного обеспечения через визуальную среду разработки программ MexBIOS™ Development Studio, которая позволяет создавать собственные программы управления электродвигателями, технологическими комплексами, выполнять моделирование работы программы и электромеханических объектов и систем; производить отладку программы загруженной в микроконтроллер; устанавливать библиотеки компонентов для новых микроконтроллеров.
Обработка данных производится на ПК в программной среде MATLAB с использованием программного продукта MexBios со встроенным набором сервисов для управления электрическими машинами.
При определении электромагнитного момента и угловой скорости было проведено несколько экспериментов. Измерительные приборы и устройства, применяемые в лабораторном стенде, поверены и соответствуют нормам точности. На рис. 4 и 5 представлен внешний вид блоков индикации момента и скорости, соответственно.

Рис. 4. Внешний вид блока индикации момента

Рис. 5. Внешний вид блока индикации скорости
Блок выполняет функции:
-
• нормализации сигнала тензодатчика;
-
• индикации текущего значения момента;
-
• выдачи сигнала (размыкание контактов гнезда X 1 и X 2) при превышении моментом допустимого значения;
-
• выдачи аналогового сигнала напряжения, пропорционального моменту (+ – Um ).
Функции, выполняемые блоком, следующие:
-
• индикации текущего значения скорости в об/мин или рад/с;
-
• выдачи дополнительного релейного сигнала (размыкания контакта) при превышении скоростью допустимого значения (гнёзда Х 1 и X 2);
-
• выдачи аналогового сигнала напряжения, пропорционального скорости (гнезда + – Un ).
На рис. 6 представлена общая схема имитационной модели, выполненная в программной среде MATLAB [10], позволяющая определить значения момента и угловой скорости, полученные от реального электродвигателя и с УКК АД.
Схема содержит блок с базой данных, полученных в ходе экспериментов, и блок УКК АД. Результаты проведенных исследований на экспериментальной установке (для АД типа АИР71В2У3) приведены на рис. 7 и 8.
Анализ приведенных зависимостей момента и скорости (см. рис. 7, 8), полученных на экспериментальном стенде, показывает, что расхождение между временными зависимостями момента и скорости, полученными с асинхронного электродвигателя и с устройства косвенного контроля АД,
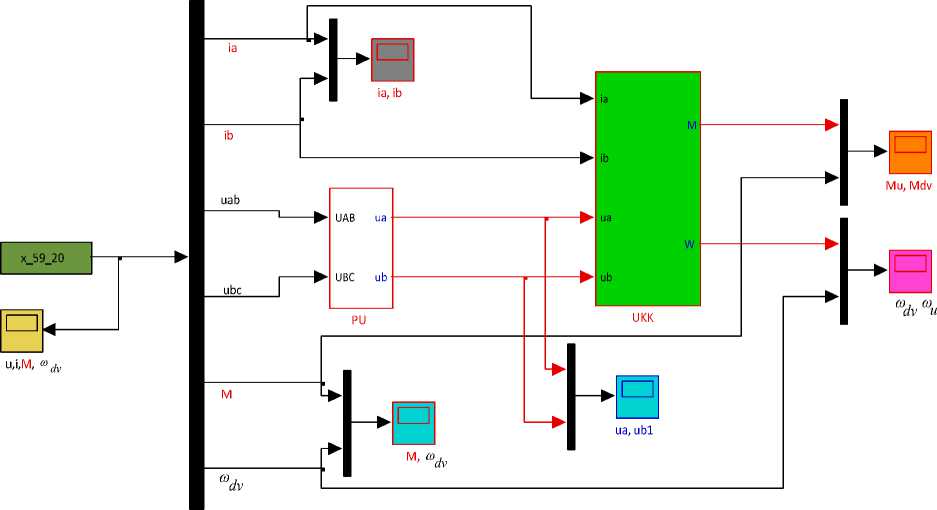
Рис. 6. Общая схема имитационной модели с УКК АД
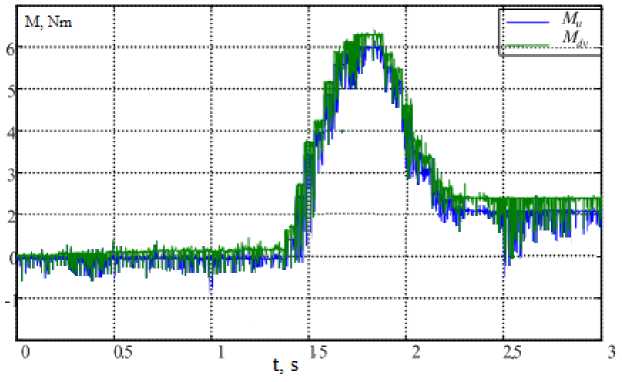
Рис. 7. Временные зависимости момента M dv и M u , полученные, соответственно, с АД и с УКК
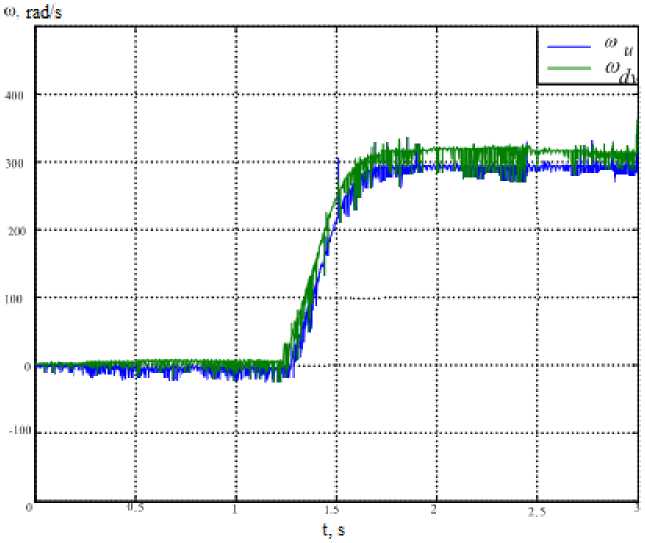
Рис. 8. Временные зависимости угловой скорости ω dv и ω u , полученные, соответственно, с АД и с УКК
составляют не более 10 %, что подтверждает правильность математического описания АД с УКК, работоспособность и эффективность способов косвенного контроля выходных координат АД для электроприводов различного назначения.
Заключение
Представленные в статье аналитические зависимости математического описания способов косвенного контроля электромагнитного момента и угловой скорости АД позволяют с заданной точностью рассчитать значения выходных координат асинхронного электропривода и проводить их непрерывный контроль.
Полученные результаты экспериментальных исследований на стенде подтверждают правильность математического описания способов косвенного контроля электромагнитного момента и угловой скорости АД устройством косвенного контроля. Установлено, что расхождение полученных значений электромагнитного момента и угловой скорости на выходе АД и с УКК на экспериментальном стенде при моделировании не превышает 10 %, что допустимо в инженерных расчетах.
Использование в экспериментальном стенде при исследованиях визуальной среды MexBios обеспечивает значительное сокращение сроков разработки электронных модулей управления, получение необходимых внешних характеристик и снижение стоимости микропроцессорных систем управления электроприводов.
Список литературы Электропривод с устройством косвенного контроля выходных координат асинхронного двигателя
- Головин, В.В. Энергосберегающие тиристорные электроприводы с автоматическим измерением координаты, регулируемой по цепи возбуждения/В.В. Головин, А.С. Карандаев, В.Р. Храмшин//Изв. вузов. Электромеханика. -2006. -№ 4. -С. 40-45.
- Панкратов, В.В. Оптимальное управление моментом асинхронного двигателя на основе метода непрерывной иерархии каналов регулирования/В.В. Панкратов//Электротехника, электромеханика и электротехнологии ЭЭЭ-2007: материалы третьей науч.-техн. конф. с междунар. участием. -Новосибирск: НГТУ, 2007. -С. 44-50.
- Макаров, Л.Н. Особенности работы асинхронного двигателя с короткозамкнутым ротором в системе частотного регулирования/Л.Н. Макаров, С.В. Ястреба//Электроприводы переменного тока: тр. междунар. 14 науч.-техн. конф. -Екатеринбург: ГОУ ВПО УГТУ-УПИ, 2007. -С. 227-230.
- Hunyár Mátyás. Reactive Power Control of Wind Turbines/Hunyár Mátyás, Veszprémi Károly//16th International Power Electronics and Motion Control Conference and Exposition (PEMC). -New York: IEEE, 2014. -P. 348-352 DOI: 10.1109/EPEPEMC.2014.6980517
- Holtz, J. Sensorless speed and position control of induction motor drives/J. Holtz//29th Annual Conference of IECON. -2003.
- Holtz, J. Speed estimation and sensorless control of ac drivers/J. Holtz//International Conference of Industrial Electronics, Control, and Instrumentation. -1993. -P. 649-654.
- Geyer, T. Direct torque control for induction motor drives: A model predictive control approach based on feasibility/T. Geyer, G. Papafotiou//Hybrid Systems: Computation and Control/M. Morari and L. Thiele (Eds.). -Berlin, Germany: Springer-Verlag. -2005. -Vol. 3414. -P. 274-290 DOI: 10.1109/EPEPEMC.2014.6980517
- Abad, G. Predictive direct torque control of the doubly fed induction machine with reduced torque and flux ripples at low constant switching frequency/G. Abad, M.A. Rodriguez, J. Poza//Proc. Annu. Conf. IEEE Ind.Electron. Soc. -2006. -P. 1000-1005 DOI: 10.1109/IECON.2006.347349
- Halász, S.Torque pulsations of multiphase inverter-fed ac motors/S. Halász, Z. Kohári//14th International Power Electronics and Motion Control Conference: EPE-PEMC 2010. Ohrid, Macedónia, 2010.09.06-2010.09.08. -New York: IEEE Press. -P. T5157-T5162. Paper 5606796 DOI: 10.1109/EPEPEMC.2010.5606796
- Купцов, В.В Метод расчета электромагнитного момента для задач конечно-элементного моделирования асинхронного двигателя/В.В. Купцов, М.Ю. Петушков, А.С. Сарваров//Вестник ЮУрГУ. Серия «Энергетика». -2010. -№ 14. -С. 57-59.
- Gergely György Balázs. New Current Control Method for Grid-Connected Inverter of Domestic Power Plant/Gergely György Balázs, Miklós Horváth, István Schmidt//EPE-PEMC 2012 15th International Power Electronics and Motion Control Conference. Novi Sad, Szerbia, 2012.09.03-2012.09.06. -5 p. Paper 482 DOI: 10.1109/EPEPEMC.2012.6397309
- Laszlo Szamel. Adaptive PF Speed Control for Servo Drives/Laszlo Szamel//International Journal of Automation and Power Engineering (IJAPE). -2012. -2:(4). -P. 65-73.
- Mathematical description of an asynchronous motor with the indirect control of the output mechanical variables/A.V. Glazachev, Yu.N. Dementyev, K.N.Negodin, A. D. Umurzakova//EPJ Web of Conferences 110. -2016. -01044 DOI: 10.1051/epjconf/2016111001044
- An Asynchronous Electric Drive with the Indirect Control of the Output Variables/A.V. Glazachev, Yu.N. Dementyev, I.V. Rakov, A.D. Umurzakova//MATEC Web of Conferences. -2017. -Vol. 91 Smart Grids 2017. 01039. -6 p DOI: 10.1051/matecconf/20179101039
- Saeidi, S. A novel algorithm for model predictive control of AC electrical drives/S. Saeidi, R.Kennel//Proc.EDPC-2012. -P. 78-84 DOI: 10.1109/EDPC.2012.6425099
- Recent Contributions of Predictive Control in Power Electronics and Drives/J. Rodriguez, H. Young, C. Rojas et al.//PRECEDE 2011.
- Chiu-Hsiung Chen. Intelligent Robust Control for Uncertain Nonlinear Multivariable Systems Using Recurrent Cerebellar Model Neural Networks/Chiu-Hsiung Chen, Chang-Chih Chung, Fei Chao et al.//Acta Polytechnica Hungarica. -2015. -Vol. 12, iss. 5 DOI: 10.12700/APH.12.5.2015.5.1
- Prusova, O.L. Thermodynamic basics of the pneumatic shock-absorber working/O.L. Prusova, R.N. Khamitov//Dynamics of Systems, Mechanisms and Machines, Dynamics 2014 -Proceedings, art. no. 7005690, WOS:000360500400059 DOI: 10.1109/Dynamics.2014.7005690
- Макаров, В.Г. Анализ состояния и перспективы развития работ по идентификации параметров электрических машин/В.Г. Макаров//Вестник Казанского технологического университета. -2011. -Т. 14, № 1. -С. 134-144.
- Волков, А.В. Оптимальное по минимуму общих потерь мощности управление частотно-регулируемым асинхронным электроприводом с АИН-ШИМ/А.В. Волков, Ю.С. Скалько//Электротехника. -2008. -№ 9. -С. 21-33.
