Энергетическая модель контроллера солнечной батареи

Автор: Иванчура В.И., Краснобаев Ю.В., Чубарь А.В., Пост С.С.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1 (47), 2013 года.
Бесплатный доступ
Рассмотрена энергетическая модель контроллера солнечной батареи, методика моделирования и исследования энергетических процессов в системах электропитания, разработанная с помощью системы проектирования MatLab 7.9.
Контроллер солнечной батареи, аккумуляторная батарея, система электропитания, энергетическая модель
Короткий адрес: https://sciup.org/148176993
IDR: 148176993 | УДК: 621.31:629.78
An energy model of a solar cell battery controller
An energy model of a solar cell battery controller is considered in the article. Procedures of simulation and researches of energy processes in the systems of power supply are developed with the help of MatLab 7.9.
Текст научной статьи Энергетическая модель контроллера солнечной батареи
Автономные системы электропитания на основе солнечных батарей (СБ) находят все более широкое применение. Это связано, во-первых, с тем, что в последние десятилетия значительно расширился спектр электротехнических устройств и приборов, применяемых в различных областях деятельности человека, использующих энергию СБ, и, во-вторых, со значительным снижением их стоимости. В состав таких систем, помимо СБ, входит аккумуляторная батарея (АБ), кабельная сеть, коммутатор нагрузки и кон- троллер солнечной батареи. Несмотря на то, что перечисленные выше элементы применяются достаточно давно, изучение особенностей их функционирования и разработка математических моделей остаются актуальными и сегодня [1].
Постановка задачи. При проектировании и эксплуатации автономных систем электропитания (СЭП) на основе солнечных батарей необходимо:
–обеспечить энергобаланс в СЭП при известных энергетических характеристиках основных и буфер- ных источников энергии и временной диаграмме энергопотребления со стороны нагрузки;
– оценить влияние деградационных изменений энергетических характеристик основных и буферных источников на работу СЭП;
– выбрать солнечные и аккумуляторные батареи исходя из условия обеспечения энергобаланса.
– разработать и реализовать алгоритмы управления и обеспечения заданных режимов элементов СЭП.
Для решения указанных проблем целесообразно использовать методы компьютерного имитационного моделирования.
Для разработки математической модели системы необходимы модели составляющих её элементов. С разработанной моделью солнечной батареи можно ознакомиться в [2], а в качестве моделей аккумуляторных батарей используются модели батарей, входящих в состав библиотеки SimPowerSystems пакета MatLab 7.9 [3]. Модель контроллера солнечной батареи рассматривается в настоящей статье. Логика функционирования модели контроллера должна учитывать:
– работу контроллера в режиме экстремального регулирования мощности СБ при дефиците мощности СБ;
– заряд АБ постоянным током ограничения задаваемой величины ( I З ) при избытке мощности СБ;
– заряд АБ снижающимся током при достижении напряжения АБ задаваемого уровня
( U аб max ) в условиях избытка мощности СБ;
– прерывание процесса заряда АБ при снижении напряжения СБ ниже уровня напряжения АБ;
– учёт изменения КПД силовой цепи контроллера в зависимости от напряжений на СБ и АБ, а также мощности, потребляемой от СБ.
Решение задачи. Для решения поставленной задачи используется среда визуального моделирования Simulink, входящая в состав пакета MATLAB 7.9. Одним из главных его достоинств является возможность моделирования, сочетающего методы структурного и имитационного моделирования. Такой подход, в отличие от пакетов схемотехнического моделирования, позволяет существенно упростить модель, а, следовательно, повысить её устойчивость и скорость работы.
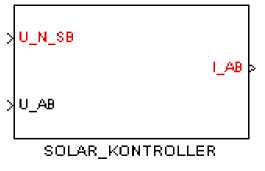
Модель контроллера солнечной батареи. Блок SOLAR_CONTROLLER представлен на рис. 1, а . На его входы поступают сигналы U_N_SB – напряжение с выхода модели солнечной батареи, используемое экстремальным регулятором мощности, и U_AB – напряжение аккумуляторной батареи, используемое преобразователем тока АБ.
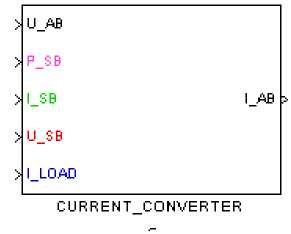
Основными элементами блока SOLAR_CONTROLLER являются экстремальный регулятор мощности СБ и конвертер тока заряда АБ. Модель экстремального регулятора мощности СБ описана в [2]. Модель конвертера тока АБ [4], которая выполняет описанные выше функции, за исключением функции экстремального регулирования мощности представлена на рис. 1, б .
а
б
Рис. 1. Структура модели контроллера СБ а – блок SOLAR_CONTROLLER; б – блок CURRENT_CONVERTER
На величину тока заряда АБ влияют следующие параметры: напряжение на выходе АБ ( U аб ), мощность солнечной батареи ( Р сб ), ток солнечной батареи ( I cб ), напряжение солнечной батареи ( U cб ) и ток нагрузки модели контроллера ( I н ).
Важнейшей составляющей подсистемы CURRENT_CONVERTER является блок PR_L, реализованный с помощью блока S-Function Builder2 на языке С++ [5; 6].
Рассмотрим принцип работы Блока S-FunctionBuilder2 (рис. 2). На входы блока поступают 8 сигналов.
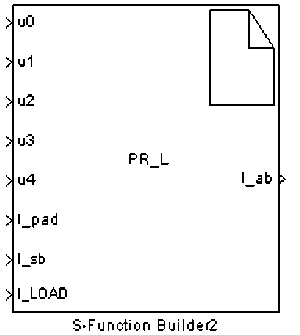
Рис. 2. Блок S-FunctionBuilder2
Логика функционирования модели определяется сигналами u0 ÷ u4. На эти входы поступают сигналы, являющиеся результатами сравнения величин Uаб , Рсб , Icб , Ucб , Iн с соответствующими уставками, и, в зависимости от результатов сравнения, модель функционирует в одном из следующих пяти режимов:
– если напряжение на выходе АБ меньше максимально возможного напряжения АБ и мощность, генерируемая солнечной батареей, меньше суммарной мощности аккумуляторной батареи и нагрузки, на вход u0 подается сигнал «1» (на входы u1, u2, u3 и u4 подается «0»), и система работает в режиме экстремального регулирования;
– если напряжение на выходе АБ меньше максимально возможного напряжения АБ, и мощность, генерируемая солнечной батареей, больше суммарной мощности аккумуляторной батареи и нагрузки, на вход u1 подается сигнал «1» (на входы u0, u2, u3 и u4 подается «0»), и контроллер заряжает АБ постоянным задаваемым током;
– если напряжение на выходе АБ равняется максимально возможному напряжению АБ и мощность, генерируемая солнечной батареей, больше суммарной мощности аккумуляторной батареи и нагрузки, на вход u2 подается сигнал «1» (на входы u1, u2, u3, u4 подается «0»), и контроллер заряжает АБ снижающимся током;
– если мощность, потребляемая нагрузкой, превышает мощность СБ, то на вход u4подаётся сигнал «1» (на входы u0, u1, u2 и u3 подается «0»), и модель работает в режиме разряда АБ;
– во всех остальных случаях системы сигнал «1» подается на вход u3 (на входы u0, u1, u2 и u4 подается «0»), и заряда АБ не происходит.
Исходный код программы блока S-FunctionBuil-der2 с комментариями:
if (u0[0] == 1) // если выполняется условие u0 -> контроллер работает в режиме экстремального регулирования
I_ab[0] = I_sb[0]-I_nagruzki_modeli[0]; // и ток заряда АБ равен разнице тока солнечной батареи и тока нагрузки else if (u1[0] == 1) // если выполняется условие u1 -> контроллер заряжает АБ постоянным током
I_ab[0] = 4; // величина постоянного задаваемого тока = 4 А else if (u2[0] == 1) // если выполняется условие u2 -> напряжение АБ достигло своего максимального значения
I_ab[0] = I_pad[0]; // и контроллер заряжает АБ падающим током else if (u3[0] == 1) // если выполняется условие u3 -> система не заряжает АБ
I_ab[0] = 0; // ток АБ = 0
if (u4[0] == 1) // если выполняется условие u4 -> АБ работает в режиме разряда
I_ab[0] =I_sb[0]-I_nagruzki_modeli[0]; // величина тока разряда определяется мощностью нагрузки.
Тестирование модели контроллера тока заряда АБ. Для проверки правильности функционирования модели контроллера солнечной батареи в соответствии с оговоренными в постановке задач алгоритмами проведено тестирование модели контроллера СБ. Логика функционирования модели описана выше.
На рис. 3 приведены временные диаграммы, поясняющие работу модели контроллера солнечной батареи при максимальной мощности СБ 120 Вт, максимально допустимом напряжении АБ 14 В и ограничением на зарядный ток 4 А.
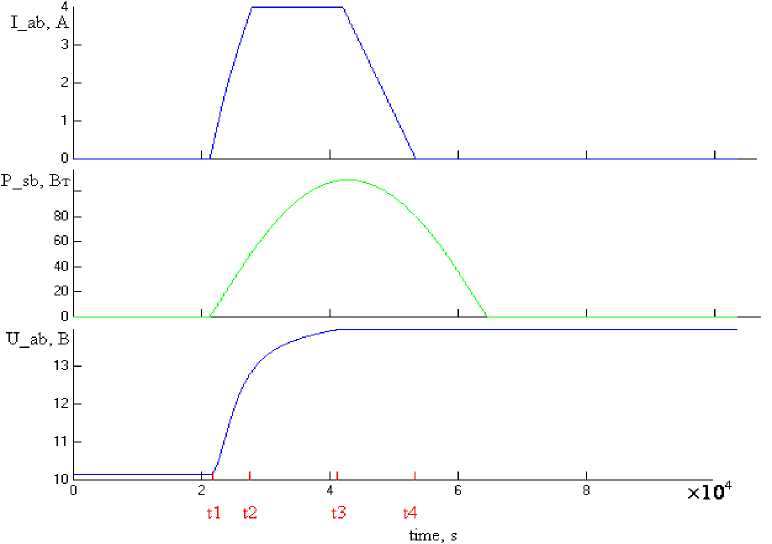
Рис. 3. Временные диаграммы, поясняющие работу модели
На временных диаграммах I_ab, P_sb и U_ab показаны ток АБ, мощность СБ и напряжение на выходе
АБ соответственно. На временных диаграммах видно, что на интервале времени [0÷t1] мощность СБ равна нулю. Ток АБ также равен нулю, и заряда АБ не происходит. Начиная с момента времени t1 СБ начинает генерировать мощность. С ростом мощности СБ растет ток заряда АБ. На интервале времени [t1÷t2] система работает в режиме экстремального регулирования. В момент времени t2 ток заряда АБ достигает задаваемого уровня ограничения, поэтому на интервале [t2÷t3] контроллер заряжает АБ постоянным током. В момент времени t3 напряжение АБ достигает максимально допустимой величины, поэтому на интервале [t3÷t4] контроллер заряжает АБ падающим током. К моменту времени t4 ток АБ становится равным нулю, следовательно, заряд АБ прекращается.
Поскольку в данной модели нагрузка отсутствует, и, следовательно, ток нагрузки равен нулю, в тестировании не рассмотрен режим разряда АБ.
Таким образом, убеждаемся, что модель функционирует в соответствии с алгоритмами, оговорёнными в постановке задачи.
Разработана модель контроллера солнечной батареи с использованием функциональных блоков в программном пакете автоматизированного проектирования MATLAB 7.9. Она обеспечивает возможность задавать ток заряда аккумуляторной батареи в трех режимах работы: экстремального регулирования, заряда аккумуляторной батареи постоянным током и заряда аккумуляторной батареи падающим током, что подтверждают результаты тестирования.
Эта модель контроллера может быть использована в составе моделей систем электропитания для решения задач, связанных с обеспечением энергобаланса и отработки алгоритмов управления в таких системах.
