Энергетические показатели импульсно-векторного управления асинхронным электроприводом с фазным ротором

Автор: Валов Артем Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 11 (111), 2008 года.
Бесплатный доступ
Рассматривается асинхронный электропривод с импульсно-векторным управлением. Обращается внимание на его благоприятные эксплуатационные и энергетические характеристики.
Короткий адрес: https://sciup.org/147158049
IDR: 147158049 | УДК: 62-83.01
Текст научной статьи Энергетические показатели импульсно-векторного управления асинхронным электроприводом с фазным ротором
Между тем, имеются сравнительно малозатратные решения, которые позволяют экономить потребленную электроэнергию при снятии технологических нагрузок. В качестве примера можно указать на асинхронный электропривод с фазным ротором при векторно-импульсным регулировании скорости.
Принцип работы электропривода. Регулирование скорости асинхронного электропривода с фазным ротором производится с помощью тиристорного преобразователя, собранного по мостовой трехфазной схеме (рис. 1). Входные цепи преобразователя подключаются к сети через обмотки статора двигателя АХ, BY, CZ, а выходные (со стороны выпрямленного напряжения) - к обмоткам ротора двигателя ах, yb. Обмотка cz может подключаться параллельно или оставаться свободной.
Управление тиристорными мостами производится таким образом, что МДС, создаваемая током в обмотках статора, всегда создает вращающий момент двигателя. Переключая тиристоры моста, создают МДС статора, вращающуюся дискретно с шагом 60°. Эти переключения производят тогда, когда ориентация векторов МДС обмоток статора и ротора соответствует двигательному моменту.
Полная мощность. На рис. 2 представлены зависимости от скорости полной мощности, потребляемой из сети, и полной мощности на зажимах статора электродвигателя при двух моментах статической нагрузки. При пониженной скорости напряжение на зажимах статора также понижено,
Рис. 2. Зависимость от скорости полной мощности: 1 - вычисленной на зажимах статора при Мс = 0,16; 2 - то же при Мс = 0,25; 3 - потребленной из сети
Электромеханика
следовательно, и мощность, потребляемая двигателем, мала (приблизительно 0,3 от номинальной мощности двигателя). Эта мощность определяет потери в электроприводе. При увеличении скорости напряжение на статоре двигателя возрастает и полная мощность, потребляемая двигателем стремится к полной мощности, потребляемой из сети.
Потери в электроприводе. Для сравнения рассмотренного способа с известными (реостатным, тиристорным преобразователем напряжения- ТПН, преобразователем частоты - ПЧ) сопоставим величину потерь в электроприводе в зависимости от момента статической нагрузки при постоянной пониженной скорости вращения вала ротора двигателя со = О,1соо, где <в0 - синхронная скорость вращения двигателя.
Потери в двигателе при таком способе управления приходятся на потери в меди, стали, механические и дополнительные потери и были определены по формулам [1]:
АРда = APiM + ДР2м + АР1С + АРмех + АРДОП;
2 7
АР1м = ^ ’ ^пГ Дымном " ;
тической нагрузки Мс при установившейся скорости вращения 0,1 ы0. На рис. 3 и рис. 4 представлена зависимость потерь в относительных единицах (базовое значение 3500 кВт) в электроприводе от момента нагрузки при различных способах управления двигателем и от мощности двигателя.
Анализ данных, приведенных в табл. 1 и рис. 3 и 4, подтверждает вывод о том, что при снижении скорости возрастает скольжение асинхронной машины и, следовательно, потери в электроприводе тем больше, чем больше момент нагрузки на валу. Экономия энергии тем значительнее, чем выше мощность электропривода. Их рост тем значительнее, а КПД тем меньше, чем меньше значение пониженной скорости. Значит, систему реостатного регулирования скорости асинхронного электропривода и систему ТПН-АД нельзя признать на современном этапе целесообразными для регулирования скорости особенно при продолжительном режиме работы из-за низких энергетических показателей и существенного снижения КПД электропривода. Оптимальным с точки
Зависимость суммарной мощности потерь от момента статической нагрузки Мс и при установившейся скорости вращения 0,1 <в0
|
мс |
АРда, Вт |
|||
|
Тип электропривода |
||||
|
ТПН-АД |
Реост. per. |
ПЧ-АД |
Имп. per. |
|
|
0,1Мн |
545 |
1423 |
623 |
780 |
|
0,2М„ |
1087 |
1869 |
634 |
793 |
|
0,ЗМ„ |
1631 |
2300 |
666 |
815 |
АР = ДР ^мех мехном
дРгм -^"^2' АРС =АР,
|
•АР |
2мном |
|
СНОМ |
■М,; |
|
(D |
3/2
М*;
<®ном )
где АРда - полные потери в двигателе; APiM и АР2м -потери в меди статора и ротора асинхронного двигателя; АРС - потери в стали; АРДОП = 0,01Р„ - дополнительные потери; АРмех — механические потери; АР1мном = 3'1?ном ‘ Ri "" номинальные потери в меди статора, 1]ном - номинальный ток статора; АР2мном = 3 ■ ^ном ■ R2 - номинальные потери в ме т 2 „ у ди ротора, 12ном - приведенный номинальный ток ротора; ДРСНОМ - номинальные потери в стали; М* = М/Мном - относительное значение момента двигателя; кп1 = кп2 = 1,1 - коэффициент искажения, учитывающий нагрев обмоток из-за несинусоидального значения тока.
В таблице приведена зависимость суммарной мощности потерь в двигателе типа MTF111-6 (Рном=3,5 кВт, пном = 895 об/мин) от момента ста-
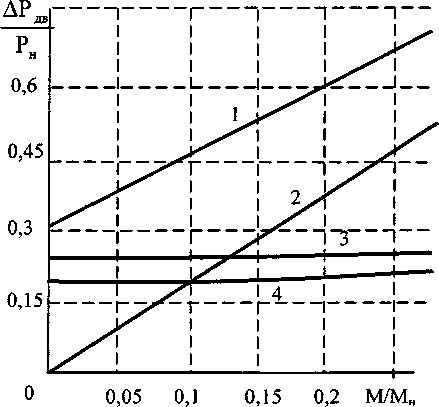
Рис. 3. Потери в двигателе при различных способах управления: 1 - реостатном;
2 - ТПН; 3 - импульсное регулирование;
4-ПЧ
Валов А.В.
Энергетические показатели импульсно-векторного управления асинхронным электроприводом с фазным ротором
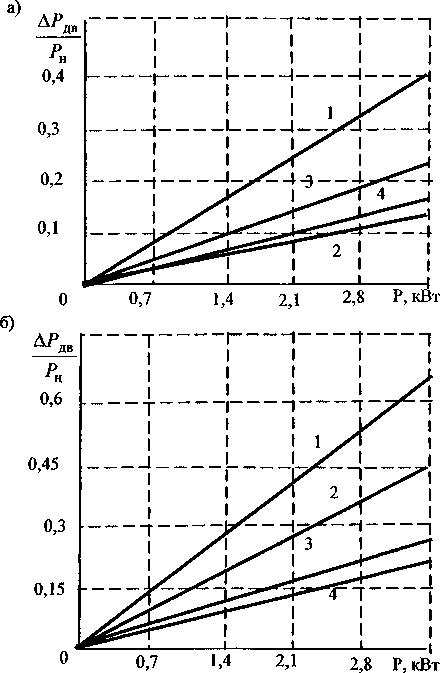
Рис. 4. Потери в двигателе в зависимости от его номинальной мощности при а) М = 0,1 М„; б) М = 0,ЗМ„ и разных способах управления: 1 - реостатном; 2 - ТПН; 3 - импульсное регулирование; 4 - ПЧ зрения КПД на низких скоростях вращения остается частотное управление. Но при этом требуются большие капитальные затраты на покупку оборудования. Система импульсного управления уступает системе частотного управления, но обладает существенно меньшими капитальными затратами. Для сравнения на рис. 5 приведена зависимость от мощности удельной цены на рынке 2007 года различных электроприводов [2]. Из графиков видно, что цена преобразователя частоты остается приблизительно равной 100 $/кВт при мощности преобразователя больше 20 кВт. Импульсное управление и ТПН обладают одинаковой силовой схемой, а их удельная цена не превышает 20 $/кВт при мощности больше 20 кВт. Стоимость резисторов значительно меньше, чем тиристоров, но управление с помощью резисторов обладает гораздо большими потерями, особенно при низких скоростях вращения.
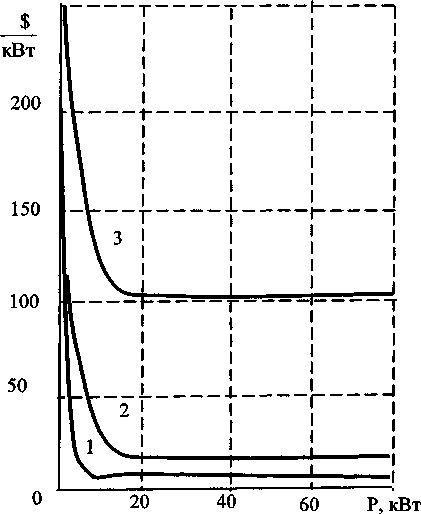
Рис. 5. Удельная цена преобразователя в зависимости от номинальной мощности двигателя: 1 - реостатном; 2 - импульсное регулирование иТПН;3-ПЧ
Заключение. Импульсное управление обладает невысокой стоимостью при малых потерях электроэнергии. Данный способ, по мнению автора, наиболее целесообразен для механизмов с вентиляторной нагрузкой, где используется асинхронный двигатель с фазным ротором. Экономия электроэнергии наиболее значительна при работе на низких скоростях. Наибольший эффект достигается в электроприводах большой мощности.
Список литературы Энергетические показатели импульсно-векторного управления асинхронным электроприводом с фазным ротором
- Браславский И.Я. Энергетический асинхронный электропривод/И.Я. Браславский. М.: Издательский дом «Академия», 2001. 358 с.
- http://snabenerg.ru/nku3.shtml
