Энергетический баланс комбинированной энергоустановки. Система управления

Автор: Булеков Н.О.
Журнал: Экономика и социум @ekonomika-socium
Рубрика: Основной раздел
Статья в выпуске: 3 (22), 2016 года.
Бесплатный доступ
В статье рассматриваются теоретические и экспериментальные исследования электромобильных транспортных средств. Экономическая эффективность использования электромобилей в различных режимах работы. Системы управления энергоустановками.
Комбинированная энергоустановка, суперконденсатор, гибрид, тягово-транспортное средство
Короткий адрес: https://sciup.org/140118650
IDR: 140118650
Текст научной статьи Энергетический баланс комбинированной энергоустановки. Система управления
Переходные процессы, возникающие в КЭУ при движении ГТС, тягово-динамического расчета.
Одним из требований, предъявляемым при проектировании каждого ГТС в отдельности, является оптимизация массы СНЭ. Исходя из максимальной массы СНЭ, которую можно разместить на борту ГТС, выбирают режим его работы в составе КЭУ и методик проектирования.
Очевидно, что масса СНЭ должна быть сведена к минимуму при сохранении всех возложенных на нее функций. Один из вариантов решения этой задачи может быть осуществлен путем неодновременного, ступенчатого разгона ГТС до заданной скорости, но при этом суммарное время разгона ГТС возрастет. Оптимальной намеченной скоростью первой ступени разгона должна являться средняя скорость движения транспортного потока в местах эксплуатации ГТС. Таким образом, критерием оптимальности выбора СНЭ является количество запасаемой суперконденсаторами энергии, необходимой для достижения выбранной средней скорости первой ступени разгона.
Для движения ГТС с устойчивой постоянной скоростью необходимо, чтобы первичный источник энергии КЭУ (ДВС-генератор, ЭХГ и др.) выдавал необходимую для этого мощность. Применительно к ДВС-генератору, у которого эффективная номинальная мощность соответствует минимальному выбросу в окружающую среду отработавших газов и минимальному расходу топлива, работа с постоянной мощностью, в стационарном режиме, наиболее эффективна. Поэтому во время всего ездового цикла движения мощность, выдаваемая ДВС-генератором, должна быть постоянной и равна мощности, необходимой для движения с максимальной скоростью. Во время ускорения при преодолении сил инерции, связанных с изменением скорости движения, необходимо сообщить ГТС мощность, равную приращению кинетической энергии в зависимости от изменения скорости и энергии потраченной на сопротивление:
р р
mavxmax + ^mgvmax+ kwFav max 3
2P ESS 2V m ’
где а - ускорение движения ГТС, м/с 2 ; yESS - КПД передачи мощности
СНЭ - ведущее колесо; vmax - максимальная скорость движения ГТС, м/с; ^ -коэффициент дорожного сопротивления; m - масса ГТС, кг; g - ускорение свободного падения, м/с 2 ; kw -коэффициент сопротивления воздуха; Fa -площадь поперечного сечения ГТС, м 2 ; jm -КПД трансмиссии (первичный источник - ведущее колесо).
Согласно тягово-динамическому расчету ГТС для его движения с постоянной скоростью необходимая мощность первичного источника определяется суммой затрат мощности на преодоление дорожного и аэродинамического сопротивлении:
p _ ^mgV max +k n F a V max 3
■
Л т
В свою очередь среднюю мощность и количество энергии, которую необходимо выдать СНЭ, можно найти как
‘ ESS = (
maV max I ^mgV max +k w F a V max 3
21 ESS
211 m
■) —
^mgV max +k w F a V max 3 , p\
Лт '
E ESS — ‘ ESS ^ p , где tp — время разгона ГТС, с.
Одной из основных отличительных черт ГТС является возможность регенерации энергии во время торможения:
F = (™2-(.
Е Рег ( 2 (
^mgvtper kwF a V 3 tper
) I 4 ESS 4 m ,
гдеtpег — время регенеративного торможения, с.
При условии, что во время торможения мощность первичного источника энергии не используется, величина регенерированной энергии будет зависеть от кинетической энергии ГТС в момент начала торможения за вычетом энергии потраченной на дорожное и аэродинамическое сопротивление. Эта величина, для цикла НАМИ II будет составлять не более 40% от всей энергии разгона.
Минимальная энергоемкость СНЭ для ступенчатого разгона (аналог коробки перемены передач) равна
E ESS = (
' ma(V k -V k-i ) + (^mg(v k -V k-i )+kwFa(v k —V k-i )t p )
21 ESS
_
(^mg(V fc -V k-i )+k w f a (V fc V k-i )%
2Л т
) —
Л т
, (6)
где к — порядковый номер разгона; vk, vk-1 —конечная и начальная скорость к-го разгона.
Условие оптимальности подбора СHЭ:
^ ESS opt (^ omd ) — E eSSI — E ESS2 — E ESS — Е рег ;
^ 1 , ^ 2 , ••• > ^ k , ^ max ■
Максимальная скорость движения ГТС (скорость движения на последней ступени) определяется из формулы (2).
Долю энергии, выдаваемой СНЭ за время разгона, можно найти из соотношения:
Ex =
E
с^ / с^ [и 2 О 1 —
2 u oc J ,
При условии, что
Uoc — %(8)
(наиболее рациональное соотношение), из (1.7) получим
Ex —^ — 4 .(9)
E 2^CU% 3
То есть доля отдаваемой энергии составляет 75% при 50%-м разряде (уменьшении напряжения).
Так как СНЭ работает в составе электрической цепи, то необходимо учесть просадку напряжения на суперконденсаторах в момент потребления энергии:
bU = irc ; и i = — , Рт где Р — мощность, развиваемая ТЭД, Вт. Тогда выражение (8)
запишется как
UO c = U^~- (12)
Заряд СНЭ может происходить во время движения ГТС со скоростью, обеспечиваемой первичным источником. Продолжительность заряда будет определяться величиной его невостребованной мощности.
Таким образом, предложенное техническое решение - ступенчатый разгон ГТС до максимальной скорости, позволяет существенно снизить вес и габариты СНЭ на основе суперконденсаторов, не потеряв его преимуществ и функционального назначения.
Расчет переходных режимов электропривода гибридного тяговотранспортного средства.
Определение минимальной мощности ТЭД, при которой возможно выполнение режима разгона, согласно тягово-динамическому расчету, сводится к проблеме оптимального управления при наличии ограничений (ограничивается мощность, т.е. произведение момента на угловую скорость). В общем случае эта проблема достаточно сложна и рассматривается в специальной литературе.
Очевидно, что для выполнения поставленного условия электродвигатель минимально возможной мощности, должен иметь характеристики, представленные на рис. 1.
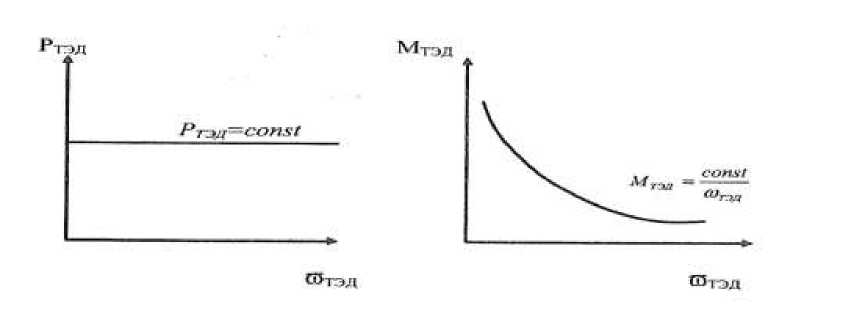
Рис. 1. Мощностная характеристика ТЭД характеристика ТЭД
Рис. 2. Моментная
Эти характеристики не могут быть использованы, так как, во-первых, задача не имеет точного решения (т.е. не удается найти в радикалах значение РТэд), из-за неразрешимого уравнения динамики ТС:
mva =^^ — — — F , (13)
р Гк^ тк где rk - радиус колеса, м, F - сила аэродинамического сопротивления, Н, w - угловая скорость вращения, с-1.
Во-вторых, данная моментная характеристика не реализуема, так как имеет место бесконечный пусковой момент и бесконечная угловая скорость холостого хода. Сформулируем более простую задачу, а именно: зададимся классом линейных моментных характеристик электродвигателя (рис. 3.) и определим приемлемую для наших целей характеристику с минимальным произведением Моыхх .
Мпд
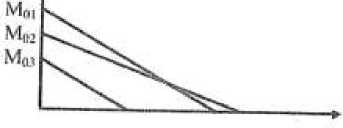
®хю Я\х| Шххг ®т)д
Рис. 3. Моментные характеристики ТЭД
Уравнение движения ГТС с ТЭД, имеющим характеристику указанного типа, запишется следующим образом:
mpr 2 Ek = М о --^ык-Мс- Fr k , (14)
^кхх гдеыкхх - скорость холостого хода колеса ГТС, совпадающая со скоростью холостого хода ТЭД (считаем пока, что редуктор отсутствует).
Чтобы из указанного класса моментных характеристик выделить какую-либо одну, необходимо задать как минимум три величины (например, Мо при w = 0 и кд).
Так мы и поступим, но вместо Мо при Ы к хх = 0 зададим другую точку, через которую (по условиям технического задания) заведомо должна проходить наша характеристика, а именно: исходя из максимально установившейся скорости итах =80 км/ч=22,2 м/с имеем:
W k2 =^=65 1/c (15)
г к
На этой скорости момент на одном колесе
МТ2 = 73.6 Нм
Итак, характеристика ТЭД должна проходить через точку wk2 =65 1/с и МТ2 =73,6 Нм
Обозначим эту точку А. Уравнение, описывающее семейство характеристик, проходящих через точку А, принимает вид:
mr 2 E k = (М т2 W k2 k g -k g W k )-М с -Fr 3 , (16)
где к д - коэффициент Крутизны.
Семейство кривых (16) представлено на
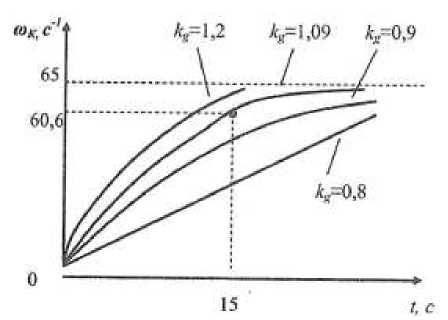
Рис. 4. Семейство кривых ТЭД
Оптимальную характеристику ТЭД получаем при
рис. 4.
kg =1,09, с
параметрами:
Мо=186,5 Нм;
ыкхх =91,2 1/с.
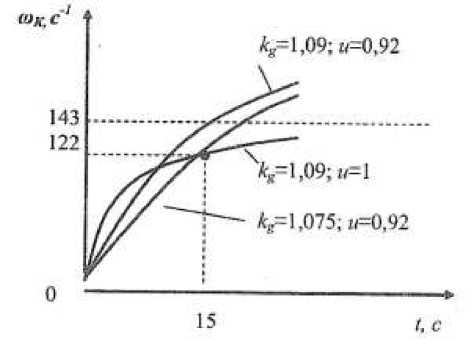
Рис. 5. Семейство кривых ТЭД с редуктором
Если применить редуктор, то коэффициент крутизны характеристики ТЭД в приводе можно уменьшить.
Уравнение (1.2) тогда принимает вид:
(JcmU2 + mprj2)Ek = (МТ2и + шк2кди2 - кд^и2} -Мс- F,rk , (17)
Семейство кривых шк = ^k(t, кд, i) показано на рис. 5.
Минимально возможный коэффициент крутизны k = 1,075 при редукторе с u = 0,92. При этом максимальная скорость ГТС 80 км/ч.
Полученная при этом моментная характеристика, приведенная к колесу ГТС, показана на рис. 6.
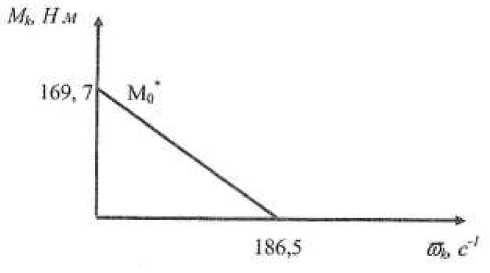
Рис. 6. Моментная характеристика на ведущем колесе ГТС
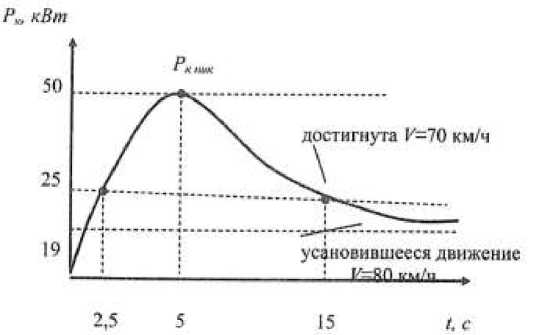
Рис. 7. Кривая изменения мощности , подводимой к колесу
Можно утверждать, что ТЭД, обладающий характеристикой, показанной на рис. 6, является оптимальным для безредукторного привода.
Очевидно, что можно использовать ТЭД с любой характеристикой, которую с помощью какого-либо редуктора можно трансформировать в характеристику, идентичную изображенной на рис. 6.
При моделировании уравнения была получена кривая изменения мощности, подводимой к колесу, как функция времени (рис. 7.).
Из графика на рис. 7. видно, что в течение 12,5 с. значение мощности превышает 25 кВт, а пиковая мощность достигает 50 кВт. Все эти значения существенно превышают возможности установленного на ГТС ДВС. Это превышение должен компенсировать СНЭ.
Комбинированной энергоустановка для сельскохозяйственной техники
Сельскохозяйственный трактор конца 90-х годов - это полноприводная машина, оснащенная малоповреждающими почву шинами увеличенного профиля, экономичным двигателем, передней и задней навеской с быстродействующей сцепкой, многодиапазонной коробкой передач с автоматическим переключением передач без разрыва потока мощности и др.
Но по-прежнему основным эксплуатационным показателем машиннотракторного агрегата (МТА) является его производительность. Выполнение многих сельскохозяйственных работ производится при условии ограничения скорости движения МТА, небольших величинах тягового сопротивления
(боронование посевов, культивация междурядий и др.), которые не дают возможности использовать всю мощность тракторного двигателя и не позволяют использовать наиболее экономичные режимы его работы. Кроме того, силы сопротивления движению тракторного агрегата имеют неустановившейся характер и во время работы непрерывно колеблются в довольно значительных пределах. Колебания нагрузки происходят в результате влияния микрорельефа поля, неоднородности почвы, особенностей технологического процесса выполняемой сельскохозяйственной операции, неравномерности сопротивлению и многих других факторов. Колебательный характер нагрузки вызывает необходимость резервировать некоторую часть мощности тракторного двигателя для преодоления систематически возникающих пиковых сопротивлений движению.
В связи с необходимостью иметь резерв мощности тракторный агрегат приходится комплектовать таким образом, чтобы его средний приведенный к коленчатому валу момент сопротивления был несколько меньше номинального крутящего момента двигателя. Поэтому при определении потребной мощности тракторного двигателя при тяговом расчете учитывают резерв мощности в пределах 15 — 20 % .
Таким образом, трактор может работать с высокими значениями тягового КПД только в определенном диапазоне тяговых усилий на крюке. Чем больше отклонение тяговые усилия в ту или другую сторону за пределы указанного диапазона, тем интенсивнее снижается тяговый КПД, т. е. производительность агрегата в большой степени зависит от соответствия параметров трактора и характера механической характеристики двигателя данным условиям работы.
Следующим немаловажным показателем на сегодняшний день является экологическая безопасность сельскохозяйственного производства. Можно отметить, что из всех отраслей народного хозяйства сельское хозяйство в наибольшей степени зависит от загрязнения окружающей среды. Использование в качестве топлива продуктов перегонки нефти приводит к выбросу огромного количества тяжелых металлов, попадающих в почву.
Комбинированная энергоустановка универсально-пропашного трактора.
Так как изменение сопротивления при постоянной скорости движения трактора в момент выполнении им сельскохозяйственных операций носит колебательный характер, т.е. имеются экстремумы функции (максимум и минимум), необходимо установить на трактор КЭУ, основной частью которой является СНЭ, способный отдать энергию при возрастании нагрузки и запасти от первичного источника энергии (ДВС - генератор, ЭХГ и др.) при ее снижении.
Для рассмотрения основных показателей, определяющих характер изменения момента сопротивления (Мс) на валу ТЭД, предположим, что во время выполнения сельскохозяйственной операции трак-тор на каком-то участке движется равномерно, почва имеет одинаковый растительный покров, влажность, механические показатели при этом остаются постоянными. Тогда нагрузку можно изобразить графиком, представленным на рис. 8. Из рис. 8. нагрузки видно, что
М _ M-max+M-min
М = 2 , где Мп - номинальный момент развиваемый ТЭД, Н м.
Рис. 8.
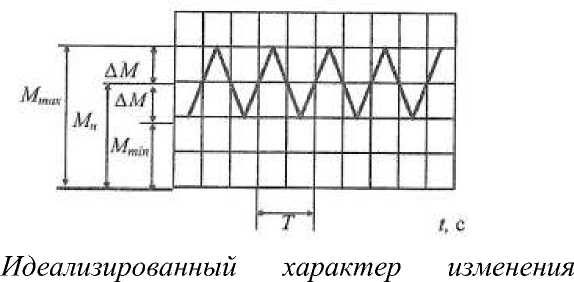
нагрузки сопротивления тракторного агрегата
Одним из первых показателей, характеризующих изменение момента сопротивления, является степень неравномерности, которая выражается коэффициентом
М тах М т in
М п
■
8 =
После преобразования выражений (18, 19) получим уравнение для определения приращения момента ±ДМ :
ым = -Мп
Вторым показателем является период изменения Т. Чем больше период Т, то есть чем больше по времени нарастание Мс , тем значительнее влияние этого нарастания на работу ТЭД.
Динамика же изменения момента сопротивления представляет собой сложную периодическую функцию, которую можно представить в виде составляющих синусоид разных колебаний, из которых одно основное колебание имеет наибольший период. Допустим, что изменение нагрузки происходит по синусоиде, представленной на рис. 9., имеющий период колебаний равный Т.
В данном случае для пульсирующего синусоидального характера нагрузки уравнения момента сопротивления для любого момента времени выражается как:
Мс = Мн + AMsinHt = Мн +^sinnt = Мн (1 + | sinHt), (21) где t- время, по истечении которого определяется величина
Мс,с ; H = —
С
.
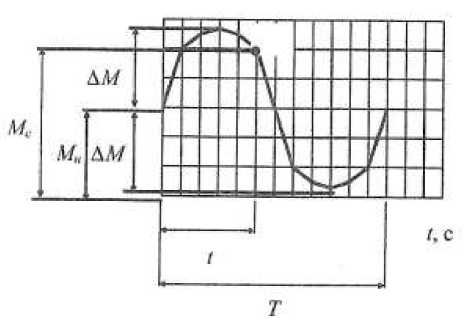
Рис. 9. Характер изменения нагрузки за период колебания
Используя выражение (1.21), можно с достаточной степенью точности определить диаграмму момента сопротивления как непрерывную цепь волн с различными максимальными значениями функции ДМ с периодами Т.
Номинальный момент сопротивления на валу ТЭД можно определить из следующего выражения:
М н где F- номинальная
= (^ н +/С т )У н
У тр- ’
сила тяги на крюке, Н; f - коэффициент
сопротивления качению трактора при работе с номинальной силой тяги на крюке; Gm - вес трактора, Н; VH - номинальная скорость движения трактора соответствующая номинальному тяговому усилию, м/с; ^тр - КПД трансмиссии.
Зная из выражений (1.21, 1.22) номинальный момент сопротивления и пульсирующий синусоидальный характер его изменения на валу ТЭД, получим
м.
с
_ (FH+rGm)yH(1+ f sinat)
У тр —
■
Переходные режимы, возникающие в электроприводе в результате изменения нагрузки, описываются уравнением движения привода:
МТЭД — Мн = J ,
где J ^— - инерционный или динамический момент на валу ТЭД, кг /м 2
Используя полученные уравнения, можно провести моделирование характера работы первичного истопника и СНЭ в зависимости от изменения момента сопротивления на валу ТЭД.
Достаточно полный учет указанных сложных явлений аналитическими методами практически не возможен. В связи с этим при эксплуатационных расчетах оптимальную степень нагрузки двигателя определяют с учетом имеющихся рекомендаций, полученных на основе обобщения результатов многочисленных экспериментальных исследований. Условия оценивают коэффициентом вариации момента сил сопротивления на валу двигателя 8. В качестве основного критерия ресурсосбережения используют минимум удельного расхода топлива двигателем: g—>min.
Оптимальную степень нагрузки двигателя в функции можно определять по значению Мс, в соответствии с формулой (21).
Рекомендуемые оптимальные по критерию g—>min значения и соответственно энергоемкость накопителя Е ^ (кДж) приведены в табл. 1 для двигателей наиболее распространенных марок.
-
1 . Оптимальная энергоемкость накопителя Ех (кДж) в зависимости от коэффициента вариации момента сил сопротивления
Двигатель
Е е при
6 = 10%
5 = 20%
5 = 30%
Д-243
60
120
180
А-41
70
140
210
ЯМЗ-238НД
180
360
540
По формуле (1.21) при Мс = Mopt можно рассчитать соответствующую оптимальную частоту вращения вала двигателя nopt по которой можно установить оптимальную степень нагрузки двигателя по тахоспидометру. Боле эффективными в перспективе могут стать микропроцессорные устройства автоматического действия для поддержания оптимальной степени нагрузки двигателя в изменяющихся условиях работы.
Обоснование структуры системы управления комбинированной энергоустановкой. Общие положения
Система управления КЭУ должна состоять из нескольких взаимосвязанных подсистем управления узлами и агрегатами, построенными с использованием специализированных микроконтроллеров, архитектура, производительность и состав периферийных устройств которые оптимизированы для решения задач эффективного управления оборудованием соответствующих агрегатов.
Каждая подсистема управления конструктивно должна строиться на базе встраиваемого в оборудование агрегата микропроцессорного контроллера с необходимым набором интерфейсов, обеспечивающих прямое цифровое управление силовыми ключами и исполнительными устройствами агрегата. Ввод сигналов локальных дискретных и аналоговых датчиков, обслуживающих систему управления агрегатом, должен производиться либо непосредственно в контроллер через предусмотренные для этого интерфейсы, либо с помощью дополнительных плат расширения ввода/вывода, подключенных к одному из стандартных интерфейсов контроллера (например, синхронному периферийному интерфейсу SPI).
Все подсистемы управления отдельными агрегатами должны объединяться в локальную сеть и управляться от ведущей системы управления - микропроцессорного контроллера-мастера, выполняющего функции контроллера управления КЭУ и обеспечивающего интерактивное взаимодействие с водителем, а также управление в реальном времени по локальной сети отдельными агрегатами ГТС. В функции контроллера-мастера должно входить также решение следующих задач: ввод сигналов с органов управления ГТС, управление системой питания и коммутационной аппаратурой верхнего уровня; начальная инициализация электрооборудования; ввод сигналов с датчиков верхнего уровня; обслуживание передней панели водителя с выводом на дисплей текущей информации о состоянии и режимах работы агрегатов и ГТС в целом. Таким образом, система управления ГТС должна строиться как распределенная, встраиваемая в оборудование мультимикропроцессорная система управления на основе надежной сети в промышленном стандарте.
Выбор типа локальной сети
Выбор типа сети является решающим для выбора аппаратной базы локальных контроллеров управления отдельными агрегатами - ведомых контроллеров, контроллера-мастера, а также выбора типов датчиков верхнего уровня.
Анализ показывает, что для реализации сети управления ГТС не подходит ни одна из имеющихся на сегодня традиционных компьютерных сетей по следующим причинам:
-
• эти сети не ориентированы на работу в реальном масштабе времени с жесткими ограничениями по скорости передачи команд и данных от контроллера-мастера к ведомым контроллерам и обратно;
-
• имеют сложные, многоуровневые протоколы обмена данными между узлами, так как предназначены для обслуживания «любых» пользователей, требования которых на этапе построения сети неизвестны и непредсказуемы;
-
• требуют наличия вспомогательного аппаратного и программного обеспечения для инициализации, запуска сети в эксплуатацию и отладки;
-
• требуют значительных затрат на программирование и отладку из-за сложности протоколов обмена.
Применительно к электромобилю все коммуникационные потребности отдельных микропроцессорных контроллеров, управляющих агрегатами известны. Так, контроллеры тяговых приводов должны получать по сети от контроллера-мастера команды - управляющие воздействия для включения / выключения локальных исполнительных устройств, расположенных в зоне обслуживания тяговых контроллеров. В ответ на запрос контроллера-мастера ведомые контроллеры должны информировать его о состоянии тягового привода и текущих значениях переменных привода (скорости, мощности на валу, температуры исполнительного двигателя, напряжения и тока в звене постоянного тока), выдавая соответствующую информацию на сетевую шину. В этих условиях наиболее перспективной представляется САN-сеть, которая уже более 15 лет активно развивается всеми ведущими мировыми автомобилестроительными компаниями и представляет собой локальную сеть микроконтроллеров (САN- Controller Агеа Net-work) с жестко стандартизованным протоколом обмена на физическом и канальном уровнях. Стандарт этой сети был разработан одной из ведущих мировых компаний в области систем привода, автоматизации и автомобильной электроники – Robert Bosch (CAN Specification 2.0A/B) и закреплен соответствующим международным стандартом ISO 11898.
В настоящее время наблюдается стремительный рост СAN -технологий, которые уже давно вышли из стен автомобилестроительных лабораторий и широко распространяются во всех сфер ческой деятельности -от бытовой техники до систем комплексной автоматизации производства и управления особо ответственными объектами на наземном и воздушном транспорте, в военной технике. По оценке международной ассоциации CiA (CAN in Automation - САN в автоматизации) ежегодно запускается в эксплуатацию более 10 млн таких сетей, а общее их количество уже превысило 125 млн.
Популярность САN-сетей объясняется очень просто - это единственная сеть, основанная на аппаратной реализации протоколов обмена нижнего уровня, что позволяет практически снять с разработчиков проблему согласования протоколов и переключить их усилия, главным образом, на решение основной задачи - на разработку исключительно прикладного уровня протокола обмена и его реализацию. Для применений в автомобилестроении протокол обмена по САN-сети часто упрощают и сводят к трем уровням: физическому, канальному и прикладному. Если учесть, что два нижних уровня реализуются аппаратно, то задача проектирования сети существенно упрощается.
Все ведущие производители электроники и микропроцессоров (Intel, Техаs Instruments, Motorola, Siemens, Philips и др.) производят серии микроконтроллеров различного назначения с встроенными на кристалл САN-контроллерами, полностью поддерживающими спецификацию САN 2.0 А/В, на базе которых могут быть созданы микропроцессорные управляющие устройства, а также интеллектуальные датчики с непосредственным выходом на САN-шину. Выпускаются микросхемы драйверов, обеспечивающие поддержку различных физических сред передачи данных по САN-сети от дешевой витой пары до оптоволокна. Ведущими фирмами (например, Motorola, Philips) за-пущены программы создания специализированных устройств ввода/вывода с непосредственным выходом на САN-сеть, а также датчиков с интегрированными CAN-контроллерами. В продаже уже появились простейшие устройства ввода/вывода с прямым управлением от САN-сети, стоящие около 1 USD -САN SLIO.
Главным преимуществом САN-сетей считается их исключительно высокая надежность и «живучесть», которая достигается за счет реализации в САN-контроллерах специальных алгоритмов обнаружения ошибок и автоматического повтора ошибочных сообщений, а также за счет использования дифференциальных линий связи с низ-ким уровнем влияния внешних электромагнитных полей. По оценкам специалистов при правильном выборе оборудования одна незамеченная ошибка в САN-сети может появиться не более чем один раз за тысячу лет непрерывной эксплуатации.
Структура системы управления гибридным транспортным средством.
В качестве перспективной системы управления ГТС предлагается распределенная микропроцессорная система управления, построенная на базе CAN-сети, в узлах которой расположены локальные микропроцессорные контроллеры управления отдельными агрегатами ГТС, встроенные в оборудование агрегатов (рис. 10.).
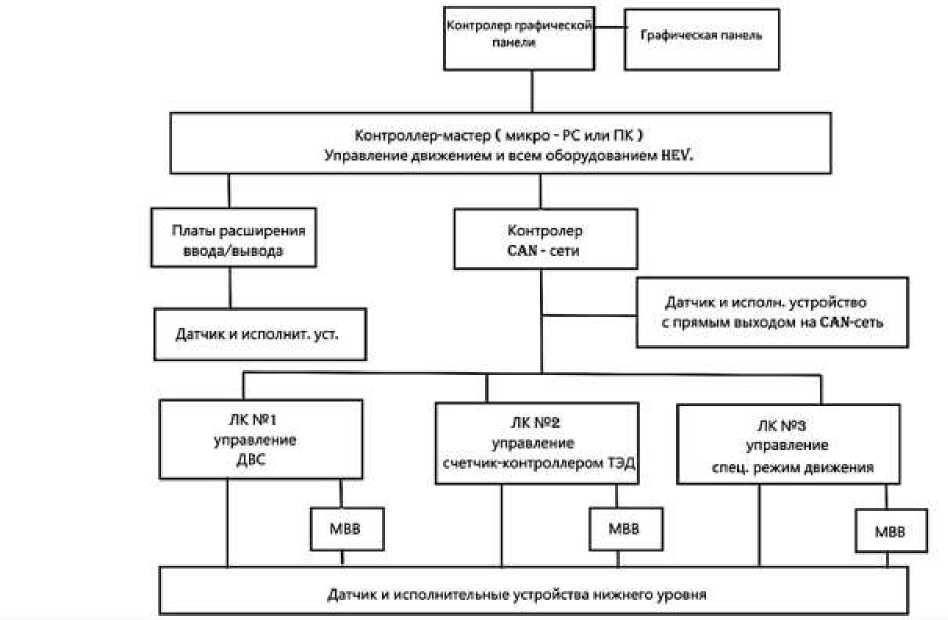
Рис. 10. Структура системы управления КЭУ на базе САN сети
Все локальные контроллеры должны иметь встроенный драйвер CAN-интерфейса и встроенный CAN-контроллер, поддерживающий протокол обмена 2.0 В. Желательна унификация аппаратного обеспечения всех локальных контроллеров, используемых в системе управления ГТС с целью минимизации затрат на разработку, конструирование, изготовление и отладку контроллеров. Различие между отдельными локальными контроллерами должно достигаться исключительно за счет специализации программного обеспечения к конкретной функции управления агрегатом. В целях удешевления аппаратной части контроллеров некоторые элементы и разъемы унифицированных локальных контроллеров, избыточные для конкретного применения, допускается не устанавливать на печатную плату.
Организация интерфейсов с датчиками и исполнительным оборудованием общего назначения.
Преимущество предлагаемой структуры микроконтроллерного у управления оборудованием ТЭД состоит в четком разделении всех имеющихся датчиков и исполнительных устройств на три категории:
-
1. датчики и исполнительны е устройства нижнего уровня;
-
2. датчики и исполнительные устройства верхнего уровня с непосредственным выходом на CAN-сеть;
-
3. датчики и исполнительные устройства верхнего уровня со стандартными интерфейсами ввод/вывода.
Все датчики нижнего уровня подключаются либо непосредственно к соответствующим интерфейсам локальных контроллеров, либо через платы расширения ввода/вывода, соединенные с локальными контроллерами по одному из стандартных интерфейсов. Например, выходные аналоговые сигналы датчиков тока типа LЕМ в тяговых приводах целесообразно вводить непосредственно на входы встроенных АЦП локальных контроллеров, а управлять коммутационной аппаратурой нижнего уровня - через плату вывода релейных сигналов, подключенную к локальному контроллеру по периферийному синхронному интерфейсу SPI.
Интеллектуальные датчики и исполнительные устройства верхнего уровня, которые имеют встроенную микропроцессорную систему управления и непосредственный выход на САN-сеть, предпочтительнее по сравнению с другими типами датчиков, так как при прочих равных условиях резко уменьшают аппаратные затраты и повышают надежность системы управления. Поскольку это направление техники только начинает активно развиваться, можно предвидеть значительные сложности при поиске и размещении заказа на соответствующее оборудование.
Выход из положения состоит в том, чтобы на верхнем уровне управления использовать либо стандартные платы расширения дискретного и аналогового ввода/вывода, подключенные к контроллеру-мастеру, либо применять новейшие интерфейсные модули с последовательным подключением непосредственно к CAN - сети, которые начинают активно выпускаться рядом зарубежных фирм.
Список литературы Энергетический баланс комбинированной энергоустановки. Система управления
- Дидманидзе, О. Н. Использование суперконденсаторов в комбинированных энергоустановках тягово-транспортных средств. -М.: ООО «УМЦ «Триада», 2004. -160 с.
- Дидманидзе О. Н., Асадов Д. Г., Иванов С. А. Руководство по диагностике, то и ремонту комбинированной энергоустановки гибридного автомобиля TOYOTA PRIUS NHW20/0. -М.: ООО «УМЦ «Триада», 2006. -357. -С.
- Дидманидзе О. Н., Фетисов А. В., Строганов А. В.Срок службы аккумуляторных батарей электромобилей//Международный научный журнал. -2011. -№ 2. -С. 118 -120.
- Дидманидзе О. Н., Асадов Д. Г., Закарчевский О. В. Анализ современных типов гибридных энергоустановок//Международный научный журнал. -2011. -№ 2. С. 113-115.
- Дидманидзе О. Н., Рыбаков К. В., Карпекина Т. П., Пуляев Н. Н. Автозаправочные процессы и системы в полевых условиях. -М.: ООО «УМЦ «Триада», 2004. -292 с.
- Рыбаков К. В., Дидманидзе О. Н. Автотранспортные процессы и системы: учебное пособие. -М.: ООО «УМЦ «Триада», 2004. -128 с.
- Варнаков В.В., Дидманидзе О. Н. Надежность технических систем. -Ульяновск: Ульяновская государственная сельскохозяйственная академия имени П. А. Столыпина, 2004. -136 с.
- Дидманидзе О. Н., Иванов С. А., Новиков Е. В. Электрохимический генератор как бортовой источник энергии системы электрооборудования автомобиля//Ремонт, восстановление, модернизация. -2004. -№ 12. С. 30 -36.
