Энергосберегающее цифровое управление магнитным приводом в аварийном режиме ориентации спутника

Автор: Сомов Евгений Иванович, Бутырин Сергей Анфимович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 1-1 т.20, 2018 года.
Бесплатный доступ
Представляются алгоритмы экономичного цифрового управления ориентацией информационного спутника в аварийном режиме. Приводятся результаты компьютерной имитации аварийной ориентации спутника землеобзора на солнечно-синхронной орбите.
Космический аппарат, управление ориентацией, аварийный режим
Короткий адрес: https://sciup.org/148205414
IDR: 148205414 | УДК: 629.78
Energy-saving digital control of magnetic actuator at an emergecy mode of a satellite orientation
We present algorithms of economical digital attitude control for an information satellite at an emergency mode. We have presented results of the computer simulation for an emergency orientation of land-survey satellite in sun-synchronous orbit.
Текст научной статьи Энергосберегающее цифровое управление магнитным приводом в аварийном режиме ориентации спутника
Рассматривается спутник землеобзора на солнечно-синхронной орбите (ССО) высотой от 700 до 1000 км. При возникновении аварийной ситуации в системе управления ориентацией (СУО) космического аппарата (КА), когда ее ресурсы не позволяют выполнить бортовую диагностику состояния и автоматическое восстановление работоспособности с помощью реконфигурации контура управления, формируется команда перехода СУО в энергосберегающий аварийный режим (АР). Рассматриваются вопросы цифрового управления магнитным приводом на всех этапах перехода СУО спутника в аварийный режим и последующего длительного поддержание этого режима, а также результаты исследовании разработанных алгоритмов с помощью компьютерной имитации.
МАТЕМАТИЧЕСКИЕ МОДЕЛИ
Инерциальными системами координат (ИСК), используемыми для описания перемещения центра масс (ЦМ) и углового движения КА, являются геоцентрическая экваториальная система координат (СК) I ⊕ (O ⊕ XIeYeIZIe) и солнечно-эклиптическая СК I s(OsXsIYsIZsI ) .
Сомов Евгений Иванович, начальник отдела навигации, наведения и управления движением НИИ Проблем надежности механических систем СамГТУ.
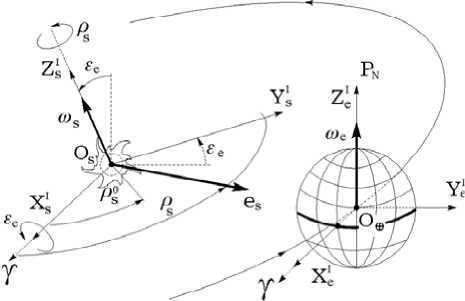
Рис. 1. Инерциальные СК
Начало ИСК I ⊕ расположено в центре Земли O ⊕ , ось X e I направлена в точку весеннего равноденствия ϒ , а ось Z I e – на Северный полюс мира P N по оси суточного вращения Земли с угловой скоростью ω e . Принимается фундаментальная ИСК J2000.0 эпохи To , которая соответствует эпохе фундаментального звездного каталога FK5 для юлианской даты JD (To) = 2451545.0 .
ИСК I s имеет начало в центре Солнца O s , ее ось X s I также направлена в точку ϒ , а оси Y s I и Z s I получаются поворотом соответствующих осей Y e I , Z I e на угол ε e относительно оси X I e (X s I ) . Угол ε e между плоскостями земного экватора X e I O ⊕ Y e I и эклиптики X s I O s Y s I равен 0.41015234 рад (23.44 град), рис. 1. В ИСК I ⊕ орт e s направления из центра Солнца к центру Земли имеет вид e sI( t ) = [ -ε e] 1 [ -ρ s( t )] 3 {1,0,0} , где ρ s ( t ) = ρ s 0 + ω s ( t - t 0 ) , ρ s 0 = ρ s ( t 0 ) , t 0 – некоторый
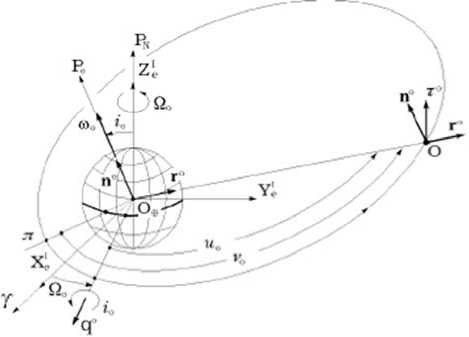
Рис. 2. Орбита КА и орбитальная СК начальный момент времени, ωS=0.19965.10–6 с–1– средняя угловая скорость обращения Земли вокруг Солнца в плоскости эклиптики за тропический год (365.2422 средних солнечных суток). Здесь и далее используются общепринятые обозначения col(⋅) = {⋅} , line(⋅) = [⋅] , 〈⋅ ,⋅〉 ,(⋅)t , [ax] и о ,~ для векторов, матриц и кватернионов, матрицы [α] i элементарного поворота вокруг i-ой оси на угол α, i = 1,2,3 ≡ 1 ÷ 3 , а также Cα ≡ cos α , Sα ≡ sinα . Астрономическая долгота Солнца λs , которая определяется в ИСК I ⊕ как угол между направлением на точку весны ϒ и ортом s = -es направления от центра Земли к центру Солнца, вычисляется по формуле λs(t)=π+ρs(t).
Применяется геодезическая Гринвичская система координат (ГСК) E e (O ⊕ X e Y e Z e ) , связанная с Землей, которая вращается с угловой скоростью ω e = 7.2921158 . 10–5 с–1. Положение ГСК E e относительно ИСК I ⊕ определяется углом ρ e ( t ) = ρ e 0 +ω e ( t - t 0 ) , где
ρe0 = ρe (t0) – угловое положение Гринвичского меридиана относительно направления на точку ϒ при t = t0 и ωe – модуль вектора Ое = {0,0, Юе} угловой скорости вращения Земли. Преобразование векторов-столбцов расположения ro и скорости vo поступательного движения ЦМ O КА из ИСК I⊕ (roI , vIo) в ГСК (rG,vG) выполняется по соотношениям e oo roG = [Pe]3 rO ; VО = -[ОеХ][Ре]3ГО + [Ре]3VО , а обратное преобразование – по соотношениям t = ШзХ; V0 = [Pе]3(v: + [Ое ХЮ.
Плоскость орбиты спутника в ИСК I⊕ определяют долгота восходящего узла ΩO и наклонение iο , рис. 2. Положение ЦМ КА на эллиптической орбите с большой полуосью ao и эксцентриситетом eo определяется вектором ro(t) и истинной аномалией νo(t) , отсчитываемой от перигелия орбиты π, который находит- ся на угловом расстоянии ωπ от ее восходящего узла в направлении движении ЦМ. Истинная аномалия νo (t) связана с аргументом широты орбиты uo(t) соотношением ио(t) = Юп + Vo(t) , см. рис. 2.
Орбитальная система координат (ОСК) O (O x o y o z o) с началом в ЦМ КА O и ортами o 1 , o 2 , o 3 имеет следующие направления осей и связанных с ними ортов: ось O y o и орт o 2 совпадают по направлению с ортом r o вектора r ο ( t ) расположения ЦМ КА в ИСК I ⊕ ; ось O z o и орт o 3 = - n o направлены противоположно орту нормали n o к плоскости орбиты; ось O x o с ортом o 1 дополняет ОСК до правой – принадлежит плоскости орбиты, перпендикулярна оси O y o и направлена в сторону орбитального движения ЦМ КА. Вектор угловой скорости ω o орбитального движения ЦМ КА определяется как Ю = 4( t ) п о =v o ( t ) п о .
Геомагнитная СК M(O⊕XmYmZm ) определяется с помощью вектора магнитного момента M⊕ =M⊕m⊕ магнитного поля Земли (МПЗ) с модулем M⊕ следующим образом: ось O⊕Zm направлена по геомагнитной оси с ортом m⊕ , фиксированным в ГСК, а ось O⊕Xm – по линии пересечения геодезического и геомагнитного экваторов. В простейшем случае МПЗ в точке O представляется магнитным потенциалом диполя, когда вектор индукции магнитного поля Земли B = Bb с модулем B = µem M⊕aom /ro3(t), m где µe – магнитная проницаемость вакуума и aom – модуль вектора aom =m⊕ - 3〈m⊕,ro〉ro , bmm
= a o m / a o m .
Используется связная с корпусом КА система координат (ССК) B (O xyz ) (body) с ортами b i , направленными по соответствующим осям ССК. Ориентация ССК B в ИСК I ⊕ определяется кватернионом Λ = ( λ0 , λ ) , где λ = { λ i } , вектором параметров Эйлера Λ = { λ0, λ } , который представляется в форме Л = {C ф /2 , e e S ф /2 } с ортом e e мгновенной оси Эйлера и углом Φ собственного поворота, а также вектором модифицированных параметров Родрига (МПР) О = { о i } = е е tg( Ф / 4) , который однозначно связан с кватернионом Л прямыми О = Х / (1 + Х 0) и обратными X 0 = (1 -о 2)/(1 + о 2) , Х = 2 о /(1 + о 2 ) соотношениями.
Связанная с панелями солнечных батарей (СБ) система координат (РСК) P (Opxpypzp) определяется так: ось Opyp и орт p2 совпадают по направлению с нормалью np к плоскости фотоэлементов панелей СБ, ось Opzp и орт p3 совпадают по направлению соответственно с осью Oz и ортом b3 ССК, а ось Opxp дополняет РСК до правой ортогональной. Угловое положение панелей СБ относительно ССК определяется углом уp = У их поворота вокруг оси Oz ССК. В парковом положении панелей СБ на корпусе КА угол уp = 0, при этом направления осей РСК и ССК совпадают.
При составлении модели движения спутника начало ССК (точка O ) считается полюсом, который совпадает с ЦМ КА при недеформиро-ванном состоянии его конструкции. Кинематические соотношения для кватерниона Л и вектора МПР с имеют вид
Л = Л о ®/2;
а = |(1 - а 2 ) ® +1 a x ® + 1 ( а , ® ) а (1)
соответственно, динамика углового движения КА описывается уравнением
J ( y ) ® = -®x K + M p + M m + M g . (2)
Здесь K = J (у)® — вектор кинетического момента (КМ) КА; ® = {®i} - вектор абсолютной угловой скорости КА, представленный в ССК Oxyz ; J(y ) = Jo + 2Jp(y ) - тензор инерции КА при произвольном положении панелей СБ, при этом изменяемая часть тензора инерции каждой панели СБ в ССК представляется в виде
J p( y ) =
j p с 2 + j p s 2
JPXyd C 2 S 2
о
JpyC S о xy 2 2
jps2+jyс2 о о jp где Jp, Jy и Jp - собственные моменты инерции каждой панели в ее ЦМ и Jpyd = jp - jy ; столбец
M p = { (j py (S 2 , ro , - C 2 ,№ ) - 2J ' ^ 2 ) Y
- (jpy(C27ш, - S^ro,) + 2JP^) Y - 2JP y} представляет вектор момента инерционногироскопических сил из-за подвижности двух панелей СБ; Mm = {mm} - вектор управляющего механического момента магнитного привода (МП) и вектор гравитационного момента Mg = {mf} = (3це/r3)o2 x J(y)o2, где це -геоцентрическая гравитационная постоянная и орт o2 представлен в ССК. Вектор управляющего механического момента МП формируется по формуле Mm = {mm} =-L x B, где вектор электромагнитного момента (ЭММ) L = {li} с ограниченными компонентами | li | < lm и вектор индукции магнитного поля Земли B с ортом b определены в ССК.
Бортовая навигационная система (БНС) с применением аппаратуры спутниковой нави- гации на основе обработки сигналов спутниковых навигационных систем ГЛОНАСС/GPS формирует в моменты времени tl+1 = tl + Tp , l е N0 = [0,1,2,3...) измеренные в ГСК Ee с периодом Tp значения как векторов расположения и скорости поступательного движения ЦМ КА, так и кватерниона ориентации КА [1]. Измерения этих переменных преобразуются в их значения относительно ИСК I е по явным аналитическим соотношениям. При определении ортов r0 = ro/ ro и v0 = vo/ v0 положение ортов o1, o2 и o3 ОСК O в ИСК Ie вычисляется на борту КА по алгоритму o3 = (r0 x v0)/ | r0 x vol; o2 = ro ; 01 = o3 x o2.
Будем считать, что в моменты времени ts с периодом T q , t s + 1 = t s + T q , s е N 0 с помощью магнитометра (ММ) измеряется вектор индукции МПЗ B = B b , а в моменты времени tr с периодом T™ , t r + 1 = t r + T m , r е N 0 формируется цифровое управление МП, когда значения компонентов вектора ЭММ L = { l i } фиксируются V t Е [ t r , t r + 1 ) .
ПОСТАНОВКА ЗАДАЧИ
При возникновении команды перехода в энергосберегающий аварийный режим панели СБ приводятся в парковое положение, отключается электропитание электромеханических и реактивных приводов, выключается бесплат-форменная инерциальная навигационная система (БИНС) и некоторые другие потребители бортовой электроэнергии, а СУО переходит в режим успокоения - остановки вращения корпуса КА в ИСК I е с помощью цифрового управления магнитным приводом [2,3]. При выполнении условия ® < ®4 =0.1 град/с для модуля ® = | ® | вектора угловой скорости ® произвольного направления в некоторый момент времени t = t i начинается переход СУО в АР, где цифровое управление МП выполняется только при движении КА по части ССО, освещенной Солнцем.
В используемой концепции такого перехода с применением БНС, ММ и МП предусмотрено три этапа: 1) перевод ориентации корпуса КА к требуемой в ИСК Iе относительно орта s направления на Солнце; 2) угловая стабилизация корпуса КА, накопление измерительной информации и перевод ориентации корпуса КА в такое усредненное за виток ССО угловое положение в ИСК I е , относительно которого устанавливаются устойчивые нелинейные колебания на каждом витке орбитального движения спутника, обусловленные противодействующими влияниями гравитационного момента и управляющего момента МП; 3) продолжение угловой стабилизации корпуса КА с помощью МП и разворот панелей СБ с помощью шагового привода относительно корпуса КА к такому положению, где будет достигаться минимальное усредненное за виток ССО угловое рассогласование ϕsp = arccos 〈np , s〉 между ортом np в РСК P и ортом s направления на Солнце.
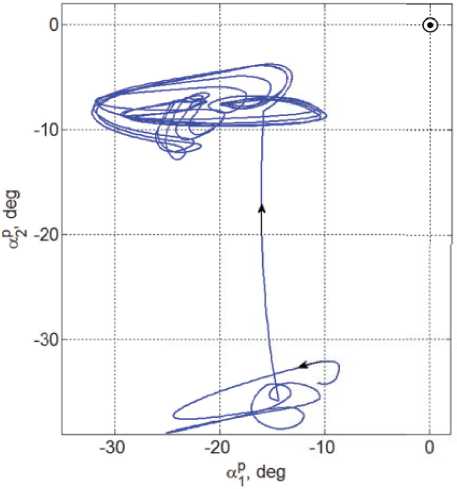
Угловое положение орта s относительно плоскости земного экватора в течение года изменяется в диапазоне [-ε e , ε e ] . Для наглядного представления детальной информации о положении орта n p относительно орта s вводится подвижная солнечно-эклиптическая система координат (ПСЭСК) O ⊕ x e s y e s z e s с началом в центре Земли O ⊕ , где ось O ⊕ x e s направлена по орту s , ось O ⊕ z e s совпадает по направлению с осью Os ZsI инерциальной солнечно-эклиптической СК I s , а ось O ⊕ y e s дополняет систему до правой ортогональной. Положение орта n p относительно орта s в ПСЭСК определяется углом α p 2 наклона орта n p к плоскости земного экватора (аналог широты) и углом α 1 p отклонения проекции орта n p на плоскость земного экватора от оси X e I ИСК I ⊕ (аналог долготы). Для любой ССО высотой до 1000 км угловое рассогласование между направлениями из центра Земли O ⊕ и из центра масс O спутника на центр Солнца O s не превышает 10 угл. сек. Такое рассогласование в дальнейшем не учитывается.
Задача статьи заключается в разработке алгоритмов цифрового управления МП на всех этапах перехода СУО спутника землеобзора в аварийный режим и последующего длительного поддержания этого режима, а также в исследовании разработанных алгоритмов с помощью компьютерной имитации.
АЛГОРИТМЫ УПРАВЛЕНИЯ
В парковом положении панелей СБ направления осей РСК и ССК совпадают, при этом орт np=p2=b2. На основе значений орта s направления на Солнце и орта no нормали к плоскости орбиты в ИСК I⊕ на борту КА определяется орбитальная солнечная система координат (ОССК) S с ортами s1,s2 и s3 , которые формируются по соотношениям s2 =s; s3 =(s×no)/|s×no | ; s1 =s2×s3 (3).
Для вычисления требуемого углового положения ССК B с ортами b i в ИСК I ⊕ формируется матрица С = С 8 = {[ s i ]} в виде столбца, составленного из строк [ s i ] ≡ s i t . Целевой кватернион Л 8 = ( X 0 ,X 8) ориентации ССК в ИСК I ⊕ определяется по матрице ориентации С 8 = {[ c ij ]} , i, j ^ 1 ^ 3 на основе явных соотношений
X 0 = (1 + tr С 8)1/2/2;
X 8 = ( c i + i i + 2 - c i + 2 i + i )/(4 X 0 ); (4)
i = 1 - 3, i + 3 = i .
Для исключения неопределенности типа (0/0) в процессе вычисления λ i s , i = 1 ÷ 3 с помощью этих соотношений при значении X 0 = 0 используется изве с тный алгоритм С. Стенли. Кватернион Е 8 = Л 8 о Л = ( e 0 , е 8 ) , вектор МПР о 68 = { о е8} = tg( Ф е / 4) е 6 , векторы ф 68 = 2 e 0 е 8 = 81п( Ф е ) е = и р 68 = { р Г} = 4 о 68 = 4tg( O 6/4) е ^ полностью определяют погрешность ориентации ССК B относительно ОССК S . Отметим, что tg( Φ e /4)=1 при Φ e = π и диапазон практически линейной зависимости вектора ρ es = 4tg( Φ e / 4) e e от угла Φ e в два раза превосходит диапазон такой же зависимости вектора р 68 = 4tg( Ф е / 4) е е . Поэтому в контуре управления КА с помощью МП используется вектор углового рассогласования £ = — р 68 .
Отфильтрованные сигналы ММ в моменты времени tr = r Tu m принимают значения B r ≡ B ( t r ) = B r b r . При формировании команды M r для вектора потребного управляющего момента на каждом полуинтервале времени t ∈ [ tr , tr + 1) с заданным периодом Tu m сначала определяется вектор потребной вариации импульса Δ I r m = Tu m M r этого момента, который представляется в виде A I “ = A I ™b + b r ( A I “ , b r ) , где вектор A I ™b = b r X ( A I “ X b r ) назначается с условием 〈∆ I r m, b r 〉 = 0 , что обеспечивает энергетическую экономичность магнитного привода. Вектор A I ™b = A I ™b i “ с модулем A I ™b и ортом i mm далее используется для формирования цифрового управления ЭММ L r = { lir } МП на периоде Tu m : определяется взаимная ориентация ортов b r и i r m в ССК, если | 〈 b r , i r m 〉 | > c s = 0.7 , то на текущем периоде дискретности МП не включается, иначе формируется вектор электромагнитного момента
L r = ( A I “ b/ T ; m)( b r X i “ )/ В r (5)
с ограниченными компонентами | l r | < 1 ™ , причем значение (5) вектора ЭММ фиксируется на полуинтервале времени t ∈ [ tr , tr + 1) . В завершении вектор управляющего механического момента МП формируется ∀ t ∈ [ tr , tr + 1) , как указано выше, в виде
М ™ ( t ) = { m “ ( t )} = — L r X B ( t ) , (6)
где вектор индукции МПЗ B ( t ) определен в ССК.
На первом этапе выполняется переориентация КА из произвольного углового по- ложения при t = ti к требуемому положению ССК в ИСК I е , которое определяется целевым кватернионом Л8. В моменты времени tr отфильтрованные сигналы БНС и ММ принимают значения Лr и Br соответственно. В эти моменты времени вычисляются кватернион Еr = (e0r, еr) = Л8 о Лr и вектор углового рассогласования еr = -рГ = -4tg(Ф® / 4) е®r. В данном режиме закон формирования потребного момента Mr принимается в виде gr+i = kb gr + kc er; Mr = J(Yr ) ku (gr + kp £r ), (7) где уr = 0, а kb, kc и kp являются постоянными коэффициентами, которые зависят от пери-m ода Tu и вычисляются по явным аналитическим соотношениям. Далее значения векторов Br = Brbr и Mr (7) используются при формировании вектора ЭММ Lr (5) магнитного привода. Здесь на каждом витке, начиная с момента времени ti, определяется среднее значение e8™ скалярной части e0s кватерниона углового рассогласования Е8 = (e8, е8). Длительность первого этапа определяется моментом времени tii, когда удовлетворяется условие e™ ^ 0.9. При рацио-m нальном назначении параметра l магнитного привода переходный процесс при любом значении угла фР (ti) = Фe(ti) < п гарантированно завершается в момент времени начала витка с номером n = 4. Здесь и далее отсчет номеров n витков ССО выполняется от момента времени очередного прохождения ее восходящего узла. В результате устанавливаются устойчивые нелинейные угловые колебания КА в окрестности «усредненного» положения орта b2 = np ССК, смещенного относительно орта s направления на Солнце в ИСК Iе . Такое смещение обусловлено витковым балансом суммарного импульса «конфликтующих» воздействий возмущающего гравитационного момента и управляющего момента магнитного привода, который «работает» только на части орбиты, освещенной Солнцем.
На втором этапе, по-прежнему при парковом положении панелей СБ ( b 2 = n Р ), начиная с момента времени t ii четвертого витка на каждом n > 4 витке ССО по сигналам БНС и отфильтрованным в моменты времени tr значениям ортов b 2( t r ) в ИСК I е накапливается сумма Е b = S b 2 ( t r ) , вычисляются ее модуль Е b = | Е b| и усредненное за виток ССО значение орта b m n = Е b / Е b . Значение орта b m n подставляется вместо орта s в соотношения (3) и (4) для формирования очередного значения
Л8т 8m 8m n+1 = (*о n+i,* n+i) для следующего витка ССО с номером n +1. Такие коррекции целевого кватерниона выполняются на четвертом, пятом и шестом витках ССО.
Третий этап, завершающий процесс перевода КА в режим аварийной ориентации, начинается в момент t = tiii начала витка с номером n = 7. Здесь выполняется разворот панелей СБ на угол у = уn относительно оси Oz ССК. Этот угол определяет положение орта p 2 = nР нормали к плоскости панелей СБ, который в ССК представляется в виде столбца p2(у) = {-SY,СY.0}. В момент времени t = tiii известно усредненное на предыдущем витке значение орта b2mn в ИСК I е , который в ССК B имеет представление bmb ее {Amb ,bm ,1^ } = Л(Л..)оЬт oMt...Y 2 n 2 n x , 2 ny , 2 nz ш 2 n ш
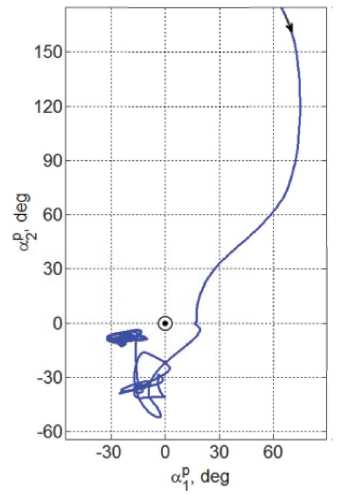
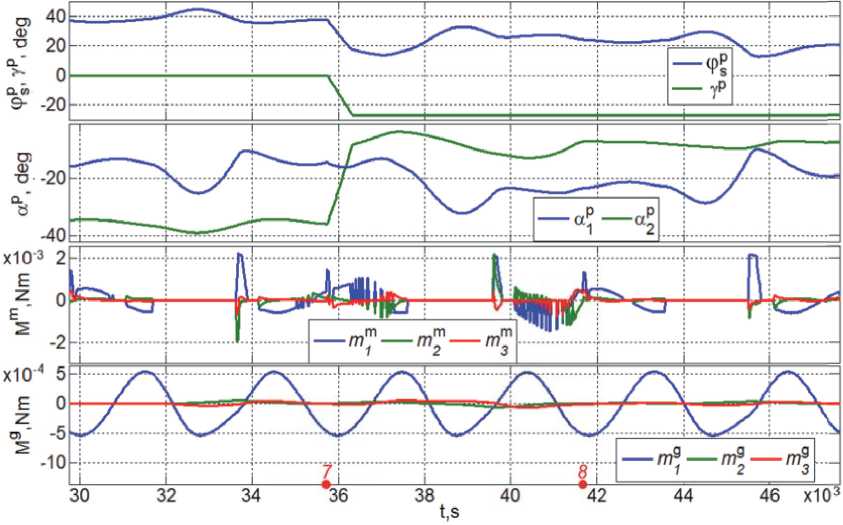
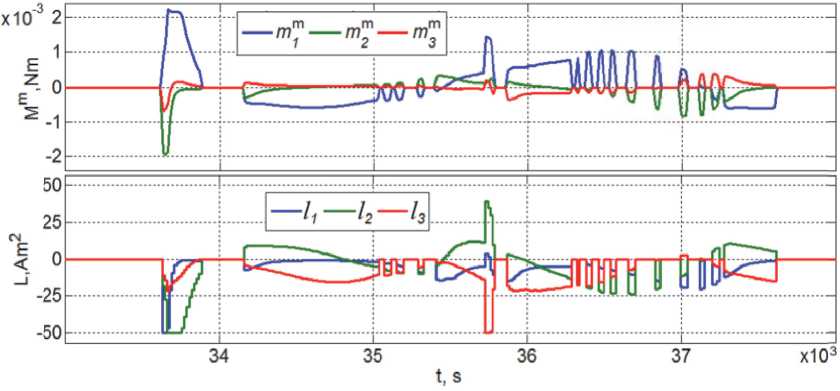
Оптимальное значение угла у = уn определяется из условия f (Y) ^ Рис. 3. Угловое рассогласование при наведении и слежении панелей СБ за Солнцем на 15 витках Vsn = arcta.J /<;. /b^). (8) Нетрудно сообразить, что в общем случае ось Oz и орт b3ССК не ортогональны плоскости, которая содержит усредненное на предыдущем витке ССО значение орта b2mn , соответствующее направлению на Солнце. Поэтому такой разворот панелей СБ может лишь свести к минимуму усредненное угловое рассогласование фр = arccos (np, s) между ортом npк плоскости панелей СБ и ортом s направления на Солнце. На последующих витках ССО с номерами n > 7 на борту КА рассчитываются очередные значения целевого кватерниона Лsmи потребного угла поворота уsпанелей СБ, но их фактический разворот рационально выполнять с периодичностью 2 раза в месяц, так как угловое положение орта s относительно плоскости земного экватора изменяется со средней угловой скоростью « 3.19 град/месяц. КОМПЬЮТЕРНАЯ ИМИТАЦИЯ АВАРИЙНОГО РЕЖИМА Имитация АР выполнена для спутника зем-леобзора массой 1000 кг на ССО высотой 720 км и наклонением 98.26 град. Расчет орбиты выполнен на дату 20.03.2017 при ее начале в восходящем узле, которому соответствуют географические координаты подспутниковой точки 30 град. ВД и 0 град. СШ, когда местное время равно 10 часам утра. При парковом положении панелей СБ (ур= 0) тензор инерции спутника J = diag{812, 587, 910} кг.м2, а моменты инерции каждой панели таковы: Jp = 16 кг.м2, jy = 8 кг.м2 и p10 кг.м2. z При имитации было принято, что БНС в моменты времени tl с периодом Tp = 1 с формирует измеренные в ГСК значения кинематических параметров орбитального движения центра масс и кватерниона ориентации спутника, которые в эти же моменты времени tl преобразуются в их значения относительно ИСК Iфпо явным аналитическим соотношениям. Также считалось, что в моменты времени ts с периодом Tq = 1 с магнитометр измеряет вектор индукции МПЗ B = B b, а после дискретной фильтрации доступных измерений в моменты времени tr. с периодом Tum= 16 с формируется цифровое управление МП (5), когда компоненты вектора ЭММ L = {li}, | li |< lm= 50 Ам2 фиксируются V t G [ tr, tr+1) . В ИСК I фначальные условия углового движения КА в момент времени t = ti, когда на первом витке ССО начинается переход СУО в аварийный режим, были назначены в следующем виде: вектор угловой скорости о(ti) = 0 и угол фp между ортом b2ССК (совпадающего с ортом npк плоскости панелей СБ при их парковом положении) и ортом s направления на Солнце принимает максимально возможное значение фp(ti) = п. На рис. 3 и 4 приведены графики изменения углового рассогласования фp, углов ap и apпри наведении и слежении панелей СБ за Солнцем на 15 витках. Нелинейные колебания спутника в аварийном режиме, которые отражаются вариациями углов ap и ap начиная с пятого витка при развороте СБ на седьмом витке, представлены на рис. 5. Рис. 4. Переход спутника в АР и его колебания на 15 витках Рис. 5. Колебания КА в АР начиная с пятого витка при развороте СБ на седьмом витке Рис. 6. Колебания КА и механические моменты в АР при развороте СБ на седьмом витке Рис. 7. Механический и электромагнитный моменты МП на шестом и седьмом витках На рис. 6 и 7 приведены некоторые результаты имитации АР в зависимости от времени при его отсчете от значения t = ti. Так, рис. 6 представляет вариации углов фР, а2 и аР, которые обусловлены угловыми колебаниями корпуса спутника относительно орта s направления на Солнце, изменение угла у2при развороте панелей СБ на седьмом витке, а также компонентов векторов управляющего момента Mm= {m™} магнитного привода и возмущающего гравитационного момента Mg= {m^}. Изменения компонентов векторов механического Mmи электромагнитного L = {li} моментов МП на части шестого и седьмого витков приведены на рис. 7, где детально представлено цифровое формирование ЭММ магнитного привода. ЗАКЛЮЧЕНИЕ Разработаны алгоритмы энергосберегающего цифрового управления магнитным приводом для ориентации информационного спутника в аварийном режиме (АР), где необходимые измерения выполняются бортовой навигационной системой по сигналам спутников ГЛОНАСС/ GPS и трёхосным магнитометром. В отличие от известных приемов выполнения АР информационных КА, в статье впервые предлагается новая схема АР и исследуются не только процессы наведения орта к плоскости панелей СБ в направлении Солнца, но и назначается требуемое угловое положение корпуса КА относительно этого направления. Реализация разработанного оригинального приема достигается с помощью виртуальной подвижной солнечно-эклиптической системы координат, которая формируется на борту КА по фактическим данным о направлении на Солнце и положении оси, ортогональной плоскости эклиптики, в процессе движения спутника по возмущенной орбите. При этом устанавливаются устойчивые нелинейные пространственные угловые колебания корпуса КА с небольшой «амплитудой» относительно направления, смещенного от орта направления на Солнце. Этот эффект обусловлен соблюдением виткового баланса суммарного импульса «конфликтующих» воздействий возмущающего гравитационного момента и управляющего момента магнитного привода, который включается только на части орбиты, освещенной Солнцем. Приведены результаты компьютерной имитации аварийной ориентации спутника землеоб- зора на солнечно-синхронной орбите высотой 720 км.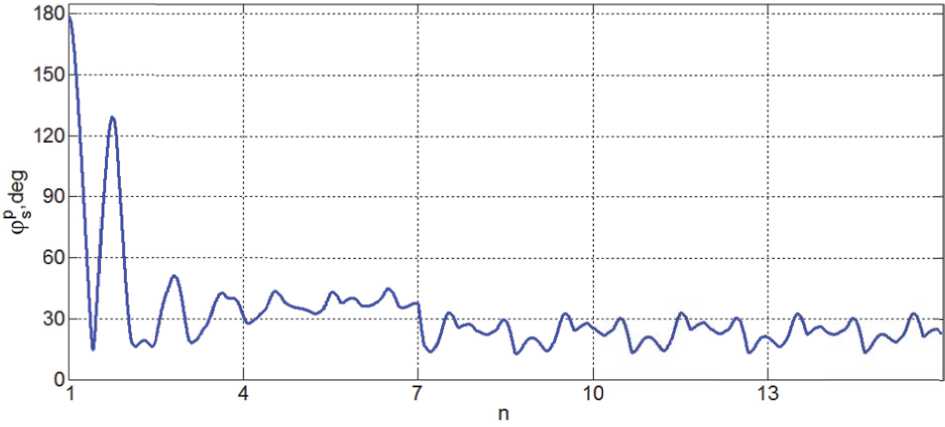
Список литературы Энергосберегающее цифровое управление магнитным приводом в аварийном режиме ориентации спутника
- Determining the attitude of the advanced crew transportation spacecraft «Federatsiya» from measurements of global navigation satellite systems/E.A. Mikrin, M.V. Mikhailov, S.N. Rozhkov, A.S. Semyonov//Proceedings of 24th Saint Petersburg International Conference on Integrated Navigation Systems. 2017. P. 94-105.
- Somova T.Ye. Guidance and digital attitude control of a maneuvering land-survey satellite//Proceedings of 24th Saint Petersburg International Conference on Integrated Navigation Systems. 2017. P. 564-568.
- Сомова Т.Е. Экономичное цифровое управление ориентацией информационного спутника в начальных режимах//Известия Самарского научного центра РАН. 2017. Том 19. № 4. С. 70-80.
