К анализу широтно-импульсной системы с обратной связью

Автор: Михеенко Анатолий Михайлович, Абрамов Сергей Степанович, Павлов Иван Иванович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (27), 2010 года.
Бесплатный доступ
Приведены результаты исследования широтно-импульсной системы (ШИС), охваченной цепью отрицательной обратной связи. На основе асимптотического метода снижения порядка линейной части системы предложена методика сведения ШИС к эквивалентной нелинейной амплитудно-импульсной системе, для которой применимы известные методы исследования.
Устойчивость, широтно-импульсные системы, сложные линейные цепи, нелинейные искажения
Короткий адрес: https://sciup.org/148176117
IDR: 148176117 | УДК: 621.373.14
Тo the analysis of pulse-duration system with a feedback
Results of research of pulse-duration system (PDS), covered by the chain of a negative feedback are shown. On the basis of symptom-free method of decrease of degree of order of a linear part of a system, the technique of converting PDS to equivalent nonlinear pulse-amplitude system for which the acquainted methods of research are suitable is offered
Текст обзорной статьи К анализу широтно-импульсной системы с обратной связью
Широтно-импульсные системы (ШИС) находят применение в устройствах автоматического регулирования (управления), а также в усилителях мощности класса D с промежуточной широтно-импульсной модуляцией, охваченных отрицательной обратной связью для уменьшения нелинейных искажений. Наличие обратной связи в ШИС неизбежно связано с проблемой обеспечения устойчивости. Решение этой проблемы в виде, приемлемом для практического применения, для ШИС в общем случае не существует. Возможности частных решений были рассмотрены в [1; 2].
Необходимо провести поиск новых методов анализа устойчивости ШИС, применимых в практических приложениях.
Методы анализа широтно-импульсных систем. Анализ импульсных систем производится, как правило, на базе теории решетчатых функций и дискретного преобразования Лапласа [1]. Теория амплитудно-импульсных систем (АИС) в настоящее время разработана достаточно подробно как для линейного тракта, так и для систем, содержащих нелинейные безынерционные элементы [1; 2].
В отличие от АИС, ШИС значительно труднее поддается анализу, поэтому их исследуют путем сведения к эквивалентным нелинейным АИС (рис. 1)
Согласно [2] уравнение системы (см. рис. 1) в решетчатых функциях имеет вид x (n, 0) = f (n, 0) - BT x n=1Y xZ Ф(x)jS(т)ю(n - m -1,1 - т)dT,(1)
m=00
τ где т = т - дискретное время; В - коэффициент линейного усиления x(t) в тракте АИС.
Интеграл в (1) представляет собой свертку функции формирующего элемента и импульсной характеристики ю ( t ). В [2] он получил название приведенной импульсной характеристики ю п ( t ) .
Если уравнение ШИС удается свести к (1) (рис. 2), то к ней можно применить все известные методы анализа и расчета нелинейных АИС.
Для ШИС функция формирующего элемента 5 ( t ) имеет вид, представленный на рис. 3, где Т - период тактовой частоты и 5 (т) соответствует двусторонней широтноимпульсной модуляции (ШИМ). При K 1 = 0, или K 2 = 0 имеет место односторонняя ШИМ.
По аналогии с (1), для ШИС можно записать следующее выражение:
x ( n ,0) = f ( n ,0) - BT x
Ф 1 ( х ) = K 2(1 - х ), ф2( х ) = K 1 + K 1 х , K 1 + K 2 = 1. (3) Введем понятие коэффициента асимметрии ШИМ:
А = K K ,
K 1 + K 2
K 1 = Н А ., K 2 = — . (4)
2 2 _
На интервале интегрирования в (2) 5 (т) = 1, а ю ( n - m - 1;
1 - т) можно представить рядом элементарных импульсных характеристик:
ю ( n - m - 1,1 - т) =
5 r v -1
=ZZ с;
v =0 ц=0
( n - m - т/ ц !
x exp qv ( n - m - т)
где 5 - число разных полюсов; r - кратность v -го полюса;
( rv - ц - 1)
C' =----1--d-----x vц (rv -ц-1)! dq(rv-ц-1)
x
P h ( q ) . tQ h ( q )
( q - q v ) rv
q = qv
Р н( q ); Q н( q ) - полиномы в числителе и знаменателе передаточной функции непрерывной части ШИС W ( q ) .
Предположим, что все полюса простые и не равны нулю (наличие нулевых или кратных полюсов не усложняет и не упрощает задачи сведения ШИС к АИС).
Для случая простых полюсов
с ;= C v = 1 W ( q )( q - q . ) q = qv -
n - 1 ГФ? (x)
x Z [ 2 S ( т )m( n - m - 1,1 - т) dr .
m =0J Ф 1 < X)
ю ( n - m - 1,1
-
s
т) = Z C v exp q v ( n - m - т) .
В отличие от (1) интеграл в (2) является функцией x(t), что и определяет особенности анализа ШИС. Согласно рис. 3, v=1
Подставляя (6) в (2), получим
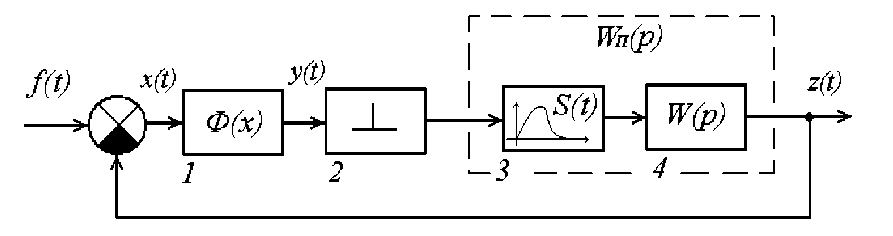
Рис. 1. Структурная схема нелинейной АИС: f ( t ), z ( t ) - соответственно входной и выходной сигналы; w ( t ) - импульсная характеристика непрерывной (линейной) части ШИС; у - длительность импульса; x ( t ) - сигнал ошибки; y ( t ) - нелинейное преобразование x ( t ); 1 - нелинейные безынерционные преобразователи тракта; 2 - генератор тактовых 8 -функций, модулированных по амплитуде сигналом y ( t ); 3 - генератор импульсов формы 5 ( t ); 4 - линейная часть тракта.
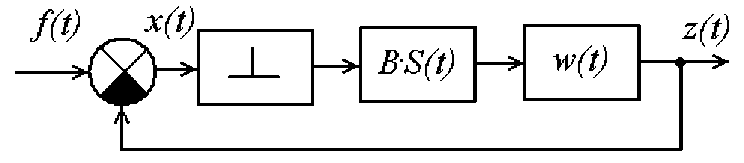
Рис. 2. Упрощенная структурная схема ШИС
x ( n , 0) = f ( n , 0) -
-
n -1 , Ъ< * >
■ BT E E J exp -qv т d т x xC 'v exp [ qv (n - m)] =
= f(n, 0)-BT E {E Фv [x(m,0)] wnv(n-m)L m=0 v=1
где
., (7)
ф 2 [ x ( m ,0)]
Ф v [ x ( m , 0) ] = J exp фД x ( m ,°)]
- q v т d т
w v = C ' v ex p [ q v ( n - m ) ] - (9)
Сравнивая (7) и (1), можно сделать вывод, что ШИС сводится к эквивалентной многомерной нелинейной АИС, а число параллельных ветвей эквивалентной АИС равно числу корней характеристического уравнения.
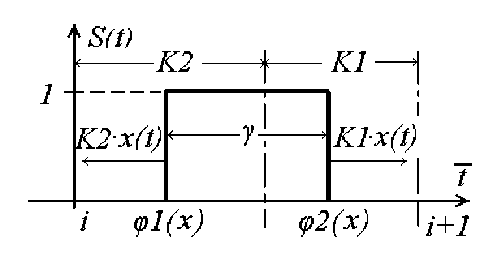
Рис. 3- Формирующий элемент ШИС
Анализ многомерных нелинейных АИС позволяет определить в общем виде лишь абсолютную устойчивость системы, причем приемлемые для практики результаты удается получить лишь для двумерных систем или для систем, сводящихся к двумерным при анализе устойчивости [3].
В связи с этим при анализе устойчивости ШИС прибегают к приближенным методам, позволяющим снизить порядок эквивалентной АИС. Например, в [4] предлагается представить Ф у ( x ) степенным полиномом вида
N
Ф v ( x ) = E r kv ) x k - (10)
k =1
В этом случае (7) принимает вид x (n ,0) = f (n ,0) -
- BT E E E C ‘ v exp [ qv ( n - m ) ] x k ( m ,0) = m =0 v =1 k =1
n -1 N
= f ( n ,0) - BT E E x k ( m ,0) ® П k ( n - m ), (11)
m =0 k =1
где гёП v(n - m ) = Erv ’C'v exp [ qv(n - m)]- (12)
v =1
Сопоставляя (7) и (11), нетрудно заметить, что в (11) число ветвей определяется числом членов полинома (10), из которых одна ветвь - линейная.
Если эквивалентная нелинейность Ф ( x ) относительно мала, то в полиноме (10) можно оставить лишь два-три слагаемых. При этом эквивалентная АИС будет двух- или трехмерной даже в случае высоких порядков линейной части ШИС .
Если
Ф v ( x ) = r v ) • x + r 2 ( v ) • x 2, то, как показано в [4], структурная схема ШИС может быть сведена к одномерной нелинейной АИС.
Такой метод приближенного анализа устойчивости особенно эффективен, когда нелинейность эквивалентной АИС выражена слабо.
Анализ устойчивости ШИС методом искусственного понижения порядка её линейной части. В основу этого метода анализа положен способ приближенного расчета переходных процессов в сложных линейных цепях, предложенный и детально исследованный Я. С. Ицхоки [5]. Его суть заключается в следующем.
Порядок исходного дифференциального уравнения линейной части системы искусственно понижается (дифференциальное уравнение укорачивается), а в описание системы вводится эквивалентное запаздывание (в некоторых случаях возможно и незапаздывающее решение). Параметры укороченного уравнения подбираются таким образом, чтобы крутизна нарастания переходной функции h ( t ) в междецильном пространстве (МП) и амплитуда колебательного процесса (если он есть) соответствовали исходной h ( t ) (рис. 4) .
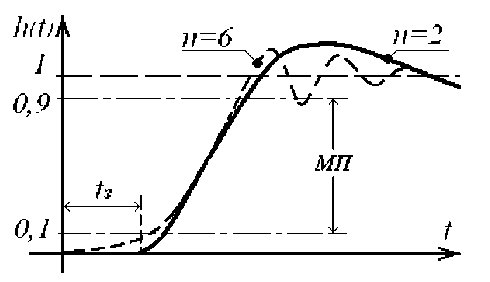
Рис. 4. Аппроксимация переходной характеристики
Такой способ может быть весьма эффективен даже при понижении сложных линейных цепей высокого по- рядка до первого-второго порядка.
Для решения задачи приближенного описания линейной части ШИС ее передаточную функцию следует привести к нормированному виду:
2 n
W ( p ) = 1 + g 1 p + g 2 p + - + g n p ,
1 + a1 p + a 2 p2 +... + akp где по крайней мере n < k - 1 (при n > k - 1 аппроксимации запаздывающей функцией не существует).
Искомая аппроксимация W(p) порядка m отыскивает- ся в виде
W ( p ) =__^__ ,
4 } 1+ b ; p + b 2 p 2 + ... + b m p m
^^^^^^^.
где t определяется решением следующего уравнения: m+1 m t з - ^зт + L + (-1) m+1 •Am+1 = 0.
m !
Здесь
A 1 = a 1 - g 1 ,
A 2 = a 2 - g 2 - a 1 • g 1 ,
A 3 = a 3 - g 3 - a 2 • g 2 - a 2 • g 1 -
Заметим, что необходимое значение задержки t з соответствует одному и притом наименьшему вещественному (всегда положительному) корню t з = t з m . Отыскать это значение непросто даже при m = 3 .
Остальные параметры аппроксимации в (12) определяются следующим образом:
K 2 + K 1 X
Ф 1 [ X ( m , 0 ) ] = I exp
K 2 ( 1- X )
τ b 1
dr =
= b 1
1 / exp b" ( K 2 + K1X )
-
exp

b1' = A1 - tзт , t2 зт b2 A 2 A1 Чт +2 | ,
где X – нормированный сигнал, изменяющийся в пределах 0 < X < 1. С учетом (4) выражение (14) можно переписать следующим образом:
2m b' = —m--m± + m-2 t3т - ... +(-1)mhs..
m 1!2! m !
Ф 1 ( X ) = 2 b 1 exp
1 2 b 1
exp
AX , X sh.
2 b 1 J 2 b 1
Для аппроксимации того или иного порядка имеются определенные условия существования.
Так, приближение порядка m = 0 существует всегда.
A 2 1
Приближение m = 1 ограничено условием — 2 < 2 •
В случае m = 2 возможны два варианта:
- приближения m = 1 не существует, т. е. A 2 > 0,5 — 12 . Тогда условие существования приближения m = 2 имеет вид
Графики этой зависимости для частного случая
b 1 = 0,5 показывают, что, как и следовало ожидать, при несимметричных видах ШИМ ( А = ± 1) нелинейность Ф1( x ) выражена значительно сильнее, чем при А = 0 (рис. 5) .
—3 <—2 - L
— 3 A 2 3
– приближение m = 1 существует, но точность приближения недостаточна. Тогда условие существования приближения m = 2 принимает вид
A 3 < — 3
-
--1--
1 — 2A2, —2 .
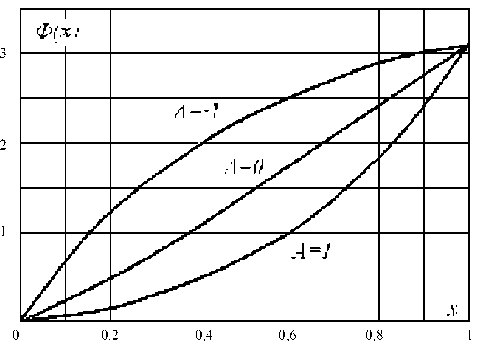
Рис. 5. Нелинейные характеристики ШИС
11—21
2 (— 2 J
— 2 1 ( — 2 1
+
3 A 1 4 (A f J
В связи с тем что повышение порядка аппроксимации резко усложняет задачу отыскания приближенного решения и анализа устойчивости ШИС, по-видимому, не следует использовать m > 2.
Предположим, что в результате применения рассмотренного выше метода аппроксимации определена передаточная функция линейной части ШИС в виде приближения первого порядка ( m = 1):
exp [ - Pt З1 ] _ 1 exp [ - Pt З1 ]
1 ( P ) 1 + b' P b' i "
1 p + $
Соответствующая решетчатая (дискретная) импульсная характеристика на основании (6) примет вид
w (n - m - k, k - т -11 ) =
Передаточную функцию приведенной линейной части найдем дискретным преобразованием Лапласа от (13):
w:( q ,0 ) =
exp
-
I(1 - t)
1 exp [ q ] - exp
1 b 1
Заменив в этом выражении q на j ю (и = « Т), получим амплитудно-фазовую характеристику приведенной линейной части ШИС. Используя эту характеристику, можно оценить устойчивость ШИС с помощью одного из известных критериев, например критерия абсолютной устойчивости положения равновесия [2]:
= —exp b 1
- b- (n - m - k)
exp
- T (k -' - t1)
1 + Re
B
exp
-
b 1
σ
1 exp [ jw ] - exp
где t 1 =
t 1 ; b = b ’ ;
T 1 T
k выбирается таким, чтобы дискрет-
ное время k - т - 1 1 > 0.
Приведенная импульсная характеристика в соответствии с (9) может быть записана в виде
где о =
д Ф 1 ( x ) д x
max
1 b 1
> 0,
– максимальное дифференциально е
значение коэффициента передачи эквивалентного нели-
w n 1 = г exp b 1
- b- (n - m -1)
exp
- ^ ( 1 - 1 1 ) . (13)
нейного элемента; В – коэффициент линейного усиления в импульсном тракте ШИС.
Нелинейность эквивалентной АИС найдем согласно (8):
Таким образом, метод приближенного расчета переходных процессов, предложенный Я. С. Ицхоки [5], по-
зволяет существенно упростить задачу анализа устойчивости широтно-импульсной системы даже в случае высокого порядка ее линейной части.
