К апостериорному моделированию нестационарных гиперболических систем

Автор: Данеев Алексей Васильевич, Русанов Вячеслав Анатольевич, Русанов Марк Вячеславович, Сизых Виктор Николаевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1-1 т.20, 2018 года.
Бесплатный доступ
В контексте качественной теории дифференциальной реализации бесконечномерных управляемых динамических систем приводятся результаты исследований тополого-алгебраических свойств семейств непрерывных динамических процессов (отображений «вход-выход») в проблеме разрешимости задачи реализации этих семейств в классе обыкновенных нестационарных дифференциальных уравнений второго порядка (в том числе гиперболических) в сепарабельном гильбертовом пространстве. Попутно обосновываются аналитико-геометрические условия непрерывности проективизации нелинейного оператора Релея-Ритца с вычислением фундаментальной группы его образа.
Дифференциальная реализация, нестационарная гиперболическая модель, олд / рлд-совместимость
Короткий адрес: https://sciup.org/148205406
IDR: 148205406 | УДК: 517.937
To a posteriori modeling nonstationary hyperbolic systems
In the context of the qualitative theory of differential implementation of infinite-dimensional controlled dynamical systems contains the results of research topology-algebraic properties of families of continuous dynamic processes (mappings, “input-output”) to the problem of solvability of the realization of these families in the class of nonstationary ordinary differential equations of the second order (including hyperbolic) in a separable Hilbert space. Along the way, substan-extracting analytic-geometric continuity conditions of projectivization nonlinear operator Rayleigh-Ritz calculation of the fundamental group of its image.
Текст научной статьи К апостериорному моделированию нестационарных гиперболических систем
Несмотря на то, что в теории идентификации распределённых систем созданы достаточно эффективные алгоритмы и разработаны важные приложения [1-3], можно констатировать, что имеется насущная необходимость заложить единое формальное основание под проблему разрешимости задачи математического моделирования диссипативно-волновых систем по результатам наблюдений процессов их функционирования. С другой стороны, прикладная эффективность развитого в [4-13] качественного подхода по исследованию проблемы реализации бихевиористических моделей имеет в варианте дифференциальной реализации существенное значение именно для нестационарных гиперболических систем [1], причём в той мере, в какой прикладной исследователь вправе Данеев Алексей Васильевич, доктор технических наук, профессор, профессор кафедры ИрГУПС.
Парадокс, окончательно установленный ныне, состоит в том, что именно предельные абстракции являются тем истинным оружием, которое правит нашим осмыслением конкретного факта.
А.Н. Уайтхед [30]
ожидать этого от предельно абстрактных тополого-алгебраических конструкций. В данном контексте настоящая работа развивает исследования [11-13] и идейно трансформирована для апостериорного моделирования управляемых (программно-позиционно) нестационарных дифференциальных систем второго порядка в вещественном сепарабельном гильбертовом пространстве.
ОСНОВНЫЕ ОБОЗНАЧЕНИЯ И ТЕРМИНОЛОГИЯ
Везде ниже ( X , || X || X \ ( у , || X || у \ ( Z , || X || Z ) – вещественные сепарабельные гильбертовы пространства (предгильбертовость определяют нормы II X II X , II X ll y , II X II Z ), L ( У , X ) - банахово пространство (с операторной нормой) всех линейных непрерывных операторов, действующих из пространства Y в X (аналогично вводим L ( X , X ) , L ( X , Z ) , L ( Z , X ) ), T – отрезок числовой прямой R с мерой Лебега ц , AC '( T , X ) - линейное множество функций на T со значениями в пространстве X , первая производная которых абсолютно непрерывных на интервале T (относительно меры ц ).
Как обычно, для некоторого банахова пространства (B, || x ||) через L2(T, ц, B) будем обозначать фактор-пространство всех интегрируемых по Бохнеру [14, с. 137] отображений f: T ^ B с нормой (dT || f (t) ||2 ц(dt))1/2. Сверх того, в целях удобства условимся, что
П : = AC ( T , X ) х AC 1 ( T , X ) х L 2( T , ц , Y ) х L 2 ( T , ц , Z ).
Далее, пусть L (Т, ц, R) - фактор-пространство классов ц-эквивалентности всех вещественных ц-измеримых на Т функций и < L - такое квазиупорядочение в L (Т, ц, R), что Ф1 < L ф2 (для Ф1, ф2 е L(Т,ц,R)) имеет место тогда и только тогда, когда Ф1(t) < ф2(t) ц-почти всюду в T; при этом для фиксированного подмножества W c L (Т, ц, R) через supL W обозначим наименьшую верхнюю грань (если она существует) функционального подмножества W в структуре квазиупорядочения < L.
Примем, что Т : П ^ L(T , ц , R ) - функциональный оператор Релея-Ритца [5]:
^(g(t),v(tXw(t),q(t)) :=
|| dg(t)/dt||x /||(g(t), V (t), w(t), q(t)|| и, если (g(t), V (t), w(t), q(t)) ^ 0 e U,
0 e R, если (g(t), V(t), w(t),q(t)) = 0 e U, где ||(х, х, х, х)||^ := (|| х + || х + || х + || х)1/2 - норма в декартовом произведении U •= X х X х Y х Z (согласно (1) [15, с.47] пространство (U, || х ||U) наделено гильбертовой структурой); при построении нелинейного оператора Т учтена лемма [16, с. 505] и положение (лемма 3 [7]), что для всех1 вектор-функций (g, v, w, q) e П будет справедливо следующее ц-вложение:
{ t е T : ||( g ( t X v ( t X w ( t X q ( t )) | U = 0} c { t е т :
|| dg ( t )/ dt || X = 0} ( mod ц );
данное вложение констатирует функциональную корректность конструкции (1), попутно отметим, что мотивирующие доводы этимологии названия оператора (1) приведены в [5].
Функциональный оператор (1) удовлетворяет простым (но важным) отношениям:
0 < L Т ( ф ),0 е L(T , ц , R ), фе ,
Т ( г ф ) =Т ( ф ),0 * r е R ; (1’)
геометрическую суть соотношения (1ф) раскрывают теорема 3 и следствие 3, сопрягающие действия оператора (1) с методами проективных представлений [15, с. 238]. Далее, фиксируя базовую терминологию, выделим ещё одно (уже эксклюзивное!) свойство оператора Релея-Ритца:
Определение 1 [5]. Скажем, что нелинейный оператор (1) полуаддитивен с весом p < 1 на се мействе динамических процессов E c П, если для любой пары (^1, ^2) е E х E выполнимо условие: Т(^1 + ^2) Рассмотрим на временном интервале T управляемые (программно-позиционно) нестационарные дифференциальные модели второго порядка (в том числе гиперболические [1]) вида: d2x (t) / dt2+ A, (t) dx (t) / dt + A0 (t) x (t) = = B (t) и (t) + B # (t) и # (dx (t) / dt, x (t)) = 0, (A,, A 0, B, B#) е L 2( T, ц, L (X, X)) х L 2( T, ц, L (X, X)) х х L2( T, ц, L (Y, X)) х L2( T, ц, L (Z, X)), где xe AC'(T,X) - траектория Каратеодори (К -решение), и е L 2(T, ц, Y) - программное управление, и # е L(X х X, Z) - оператор ли нейного позиционного управления (считаем, что декартов квадрат X х X наделен топологи- ей при норме X 2 У/2 + • ) ); следуя построени ям [10], вектор-функцию (dx/dt,x, u,u#(dx/dt,x)) тоже назовем К-решением дифференциальной системы (2), а упорядоченную четверку опе-ратор-функций (A 1,A0,B,B#) - нестационарной (A 1,A0,B,B#)2-моделью системы (2). Везде далее и # е L(X х X, Z) - заданный оператор обратной связи в структуре позиционного управления, N - фиксированное семейство (пучок) управляемых динамических процессов вида: N с Пи # := {(dx / dt, x, u, u#(dx / dt, x)) e e П: xe AC\T,X),ue L2(T,ц, Y)}, (3) где Card N = exp X 0, X 0 - алеф-нуль (соответственно exp X0 - мощность континуума). В контексте определения 1 [4, c. 10] семейство процессов (3) задает некоторую непрерывную бихевиористическую динамическую систему N (возможно сформированную a posteriori). Введём для системы N два потенциальных структурных свойства: Определение 2 [6]. Пучок вектор-функций P c N обладает: - обыкновенной линейно дифференциальной совместимоcтью (ОЛД-совместимостью) второго порядка, если либо P = 0, либо существу-ет2такая дифференциальная система (2), что функциональный пучок P принадлежит классу допустимых К-решений этой системы; - распределённой линейно дифференциальной совместимостью (РЛД-совместимостью) второ- Замечание 1. Иногда для краткости термин «второго порядка» (порядок дифференциальной системы (2)) будем опускать. Необходимо обратить внимание на следующие факты: i) требование (геометрическое условие) в структуре РЛД-совместимости наличия конструкции абсолютной выпуклости функционального множества P существенно, т.к. возможно положение, когда любое подмножество P' с co(P), CardP' = к образует ОЛД-совместимое множество, в то время как само множество Р не обладает свойством РЛД-совместимости ступени k; ii) ОЛД-совместимость множества Р не обеспечивает единственность (A1,A0,В,В#)2-модели, которая через дифференциальное уравнение (2) реализует семейство динамических процессов Р; iii) РЛД-совместимость произвольной ступени к (в том числе при Card P = X 0) не эквивалентна наличию ОЛД-совместимости. Ниже исследуем связь и различие в структурах ОЛД- и РЛД-совместимости. ЭЛЕМЕНТЫ ГЕОМЕТРИЧЕСКОГО АНАЛИЗА ОЛД/РЛД-СОВМЕСТИМОСТИ Ясно, что ОЛД/РЛД-совместимость второго порядка инвариантна по отношению к идемпотентному действию оператора Span, что позволяет ввести следующие геометрические конструкции: Определение 3. Если Р* ⊂ N (аналогично Р# ⊂ N) – максимальное множество со свойством ОЛД-совместимости второго порядка (аналогично РЛД-совместимости ступени k), то SpanР* (соответственно SpanР#) назовём обыкновенным пластом над N (распределённым пластом ступени k над N) и, если N ⊂ SpanР* (N ⊂ Span Р#), то такой пласт будем называть однородным. Замечание 2. Может оказаться, что над N существуют обыкновенные пласты и распределённый однородный пласт (при этом они все не совпадают), или существует распределённый однородный пласт произвольной ступени k, но отсутствует какой бы-то ни было обыкновенный пласт. На первый взгляд понятие РЛД-совместимости кажется отчасти весьма замысловатым, однако предложения этого раздела покажут, насколько оно на самом деле аналитически продуктивно. Так, нижеследующее утверждение констатирует: РЛД-совместимость 2-го порядка любой ступени есть свойство конечного характера [17, с.28] и, поэтому, для каждого непустого РЛД-совместимого подмножества процессов Р ⊂ N существует максимальное РЛД-совместимое подмножество Р# такое, что Р ⊂ Р#⊂ N; можно только сожалеть, что в общем случае это свойство динамической системы N не имеет место в отношении признака ОЛД-совместимости. Лемма 1.4Для пучка динамических процессов N ⊂ Пu# признак РЛД-совместимости 2-го порядка ступени k – свойство конечного характера. Как было отмечено выше, лемма 1 устанавливает принципиальный факт: каждое непустое семейство динамических процессов N ⊂ Пu# в соответствии с леммой Тейхмюллера-Тьюки [17, с.28]5 либо не содержит ни одного непустого подмножества со свойством РЛД-совместимости (а значит и ОЛД-совместимости), либо над исследуемым пучком динамических процессов N непременно найдётся некоторый распределённый пласт (возможно не единственный). Наделим пространство H2 := L2(T, ц, X) х L2 (T, ц, X) х L2(T, ц, Y) х L2 (T, ц, Z) топологией при норме II(g,V,w,q)IIh:= (fT(l|g(t) + (h(t) + II w(t) + ||q(t))ц(dt))1/2, (g, v, w, q) e H2; заметим, что H2 – гильбертово пространство в силу конструкции ||×||H (см. [15, с. 47]). Лемма 2. Пусть динамический пучок N ⊂ Пu# образует ОЛД-совместимое множество второго порядка, тогда существует такой обыкновенный пласт Е над Пu# замкнутый в пространстве H2, что осуществимо включение N ⊂ Е, при этом Е – распределённый пласт второго порядка ступени k над семейством процессов Пu#, где k - любое натуральное число. Лемма 2 имеет важное геометрическое следствие, показывающее, что ОЛД-совместимость топологически является настолько «хорошей», насколько этого можно было бы пожелать. Следствие 1. Замыкание ОЛД-совместимого множества в топологии гильбертова пространства H2также является ОЛД-совместимым множеством. Согласно следствия 1 любой обыкновенный пласт незамкнутый в гильбертовом пространстве H2 всегда можно топологически расширить действием оператора замыкания Куратовско-го [17, с.36] до его замыкания с сохранением свойства ОЛД-совместимости второго порядка. В данном контексте, систематизируя терминологию, имеет смысл такое расширение назвать топологическим ОЛД-расширением; что, в общем случае, не справедливо в отношении распределенного пласта, поскольку не всегда выполнимо топологическое распространение РЛД-совместимости. Введённая топологическая конструкция наводит на вопрос: существуют ли в пространстве H2 незамкнутые обыкновенные пласты, и таким образом, допускающие топологическое ОЛД-расширение? Ответ положителен - таковыми (в силу теоремы Бэра о категории [14, с. 96]) являются пласты со счетным базисом Гамеля (алгебраическим базисом [14, с. 141]), что констатирует следующая связь топологической структуры данных пластов с их с алгебраической размерностью6: Следствие 2. Если обыкновенный или распределённый пласт над семейством процессов N ⊂ Пu# замкнут в пространстве H2, то мощность его базиса Гамеля не может быть равной X 0. Следуя обычной терминологии башен множеств [15] надмножеством Пu#, можно сказать, что структура ОЛД-совместимости сильнее (иными словами тоньше) структуры РЛД-совместимости (равносильно, РЛД-совместимость слабее (грубее) ОЛД-совместимости); поскольку всякое ОЛД-совместимое множество динамических процессов из Пu# является РЛД-совместимым для любой ступени k (обратное предложение в общем слу- чае неверно; см. выше пункт iii) замечания 1). Далее GN – граница [17, с. 51] множества abs co(N) в топологическом пространстве SpanN с топологией, индуцированной из объемлющего пространства H2. В силу следствия 2 справедлива Теорема 1. Если Card dim SpanN= X 0, то пространство SpanN не полно. Ясно, что исследование РЛД-совместимости фиксированного семейства динамических процессов (3) должно начинаться со ступени k = 1, поэтому в арсенале теоретических средств подобных качественных исследований не по- следнее место может занять следующее утверждение, выявляющее необходимые условия существования моделируемой гиперболической системы. Теорема 2. Над семейством динамических процессов N ⊂ Пu# существует распределенный однородный пласт ступени k = 1 в том и только в том случае, если ^[GN ] с L2(T, ц, R) при этом линейное многообразие SpanN образует обыкновенный однородный пласт тогда и только тогда, когда множество Y[GN] ограничено сверху в пространстве (L2(Т,μ,R), ≤ L), что эквивалентно тому, существует supL Т[PN] е L2(T,ц,R) в структуре квазиупорядочения ≤ L. Если каждый пучок управляемых процессов Ni с Пu#, CardNi< X0, i = 1, ..., n обладает свойством РЛД-совместимостии 2-го порядка ступени k = 1, ^ Ni имеет некото- i=1,..., n то семейство процессов рую дифференциальную реализацию (2), коль скоро оператор Релея-Ритца полуаддитивен с некоторым весом p ≤ 1 на замкнутом многообразии SpanN1 + SpanN2 + … + SpanNn. Замечание 3. Полуаддитивность оператора Релея-Ритца находится в важной геометрической зависимости от леммы Тейхмюллера-Тью-ки, а именно: в семействе P существуют максимальные множества, на каждом из которых оператор (1) полуаддитивен с некоторым весом p ≥ 0, при этом в случае p ∈ (0,1) данные множества динамических процессов не могут быть линейными (вариант E={0} ⊂ P исключаем). Поэтому в теореме 2 вес полуаддитивности – некоторая постоянная p ≤ 1. В данном контексте можно показать, что полуаддитивность с весом p≤ 1 оператора Релея-Ритца совместно с леммой Тейхмюллера-Тьюки приводят к факту: если E – обыкновенный пласт из формулировки леммы 2, то в семействе процессов E найдется максимальное линейное множество, замкнутое в пространстве H2, на котором оператор Релея-Ритца полуаддитивен с весом p ≤ 1, что, в конечном итоге, делает геометрически корректной формулировку второй части теоремы 2; можно также ставить вопрос об определении веса полуаддитивности (в духе теоремы 2 [19]). В силу формулы (1’) можно считать, что Y½SpanN = Y½PN, где PN – вещественное проективное пространство [20, c. 139], ассоциированное с линейным многообразием SpanN; т.е. PN есть множество орбит мультипликативной группы R* = R\{0}, действующей на SpanN\{0}. В данной трактовке ясно видны топологические свойства пространства PN, CardN< X 0, разумеется, в первую очередь, - его компактность (в частности, если dim SpanN = 3, то 2-многообразие PN устроено как лист Мёбиуса, к которому по его границе приклеен круг [20, c. 162]); попутно отметим, что, на пространстве PN, CardN ≤ X 0 можно ввести структуру CW-комплекса [20, c. 140], что важно при рассмотрении вопроса о геометрической реализации многообразия PN [20, c. 149]. Пользуясь этими замечаниями несложно написать «проективный вариант» теоремы 2, при этом компактность PN подсказывает, что важную роль может сыграть непрерывность оператора Релея-Ритца (ниже при установлении метрической структуры в L (Т, ц, R) прибегли к теоремам 15, 16 [18, cс. 65, 67]). Теорема 3. Рассмотрим L (Т, ц, R ) с топологией, индуцированной сходимостью по мере μ, или, что эквивалентно, как полное сепарабельное метрическое пространство, введя на нем метрику Гт(_<) :=fт|^(t)-«t)|(1+К(t)- -«t)|)-1 ц(dt),5,( eL(Т,^R), и пусть N с Пu#, CardN < X 0, при этом (g,v,w,q)c N влечет за собой w = 0. Тогда, если пучок N является РЛД-совместимым ступени 1, то оператор Релея-Ритца Ψ : PN → L(T,µ,R) – непрерывный. Следствие 3.7Для конечного пучка N ⊂ Пu# оператор Ψ : PN → L(T,µ,R) – непрерывный, если при произвольном выборе (g,v,w,q) ∈ SpanN и t ∈ Tg:= {t ∈ T: g(t) = 0 ∈ X} для них найдется такое действительное число dt > 0, что μ((t-dt, t+dt) П Tg) = 0. В контексте следствия 3 и первой части теоремы 2 полезно также следствие 4, для которого вначале введем вспомогательную конструкцию: для натурального n обозначим через Wn некоторое конечное n-1-плотное подмножество в Ψ[PN ] (подмножество Wn найдется в силу следствия 3 и п. 4) теоремы 2 [18, с. 44], при этом {Wn}n=1,2,… - ε-сеть в метрическом пространстве (^ Pn ], Pt ). Следствие 4. Пусть fn := supL ^ Wn , тогда supL Ψ[PN ] существует, если и i=т,.о..,лnько если {fn} – последовательность Коши в метрическом пространстве (L(T, ц, R), pT) и значит в силу теоремы 2 при supL Ψ[PN ] ∈ L2(T,µ,R) динамический пучок N образует ОЛД-совместимое множество. Замечание 4. Значение следствий 3, 4 можно суммировать следующим образом: для пучка динамических процессов NсПu#, CardN< X0 непрерывность оператора Релея-Ритца, действующего на конечном CW-комплексе PN, обуславливает компактность множества Ψ[PN ] , а также гарантирует существование такой точки γ*∈ PN, что выполнимы следующие оценочные соотношения: Pt (W(p), 0) = sup VPt (W(y), 0): / e Pn } < Pt ( suPl T[ Pn ], 0), ^(Y*), 6 L2(Т, ц, R) ^ supL^[Pn ] 6 L2(Т, ц, R), где supL Ψ[PN ] = supL Ψ[GN]. При этом, если оператор Ψ : PN → L(T, µ,R) взаимно-однозначный, то Y½PN – гомеоморфизм (теорема 7.2 [20, c. 104]), что позволяет вычислить (см. теорему 2.3 [20, с. 47] и пример 88 [21, с. 368]) фундаментальную группу метрического пространства (T[PN ], pT), т.к. гомеоморфные пространства суть пространства одного и того же гомотопического типа. ПАРАМЕТРИЧЕСКАЯ ИДЕНТИФИКАЦИЯ МОДЕЛИ РЕАЛИЗАЦИИ Ясно, что задача построения дифференциальной реализации гиперболической системы должна заканчиваться параметрической идентификацией исследуемой модели. Ниже рассмотрим прямой алгоритм параметрической идентификации дифференциальной модели демпфированных колебаний упругого элемента в форме уравнений Лагранжа II рода: Md2z(t)/dt2+ Ddz(t) /dt + Sz(t) = 0,z=col(z1,…,zn), (4) где M, D, S – матрицы коэффициентов инерции, демпфирования и жесткости. В условиях апостериорного моделирования уравнения (4) задача идентификации матриц M-1D, M-1S строится (на базе измерений собственного движения вектора col(ž1(t),…,žn(t)) на временном интервале T) из решения следующей задачи параметрической оптимизации: min ∫T ||d2ž(τ) /dτ2+ M-1Ddž(τ) /dτ+ M-1Sž(τ) ||2dτ, (5) где ||.|| – евклидова норма в Rn; данная постановка – прямое обобщение корреляционных методов, поэтому более помехозащищена в отличие от схемы параметрической идентификации, предложенной в [25]. Процедура решения задачи (5) укладывается в алгоритмическую схему вычисления матриц M-1D, M-1S, выраженную блочно-матричным соотношением: ГM-1D,M-151 = -JT tod(t)[to(r)]*drx[$Tto(t)[®(t)]*dr]-1 L J (6) tod (t) := col(d2z1 (t) / dt2, ..., d2zn (t) / dt2 )e Rn, нения (4) в силу (6) имели оценку: -0,2843 0,8147 -0,7495 0,2909 M-1D = -0,4651 1,2049 -0,6417 1,6048 -1,0873 0,4219 -1,4720 0,5840 [M-1D, M-1S] - блочная n x 2n-матрица, [.]* -операция транспонирования. Замечание 5. Формула (6) позволяет по апостериорным данным измерений датчиков wd(х), w(x) восстановить n x n-матрицы M-1D, M-1S. В качестве датчиков можно использовать пьезоакселерометры АС 56511 массой 0,001 кг с рабочим диапазоном 1-3000 Гц и диапазоном измеряемых ускорений 0,1-100 g. Согласно (6) уравнения Лагранжа (4) трансформируются к виду Коши с вектором состояний w(t)е R2n и 2n x 2n-матрицей идентифицированной системы Г-M-5 -M-D1 [о N E, J, где 0n и En - соответственно нулевая и единичная n x n-матрицы. Ниже для предложенных алгоритмов приведен результат тестовой проверки моделирования пакета стоячих волн гиперболической при исходных данных: T=10 сек, l=10 м, n =4. Движение t ^ ^4(xi, t) =: zi (t),i —1,...,4 в точках x,, i=1,^,4 («эталонная» модель) и ее «несогласование» t ^ zi (t),i —1,...,4 с динамикой t ^ zi (t), i — 1,...,4 идентифицированной модели (4)-(5) представлены на рис. 1, 2 (кривые i=1,^,4 соответствуют номерам датчиков), идентифицированные матрицы M"1 D, M-1S урав- -0,8676 2,1738 -2,0620 0,8264 M-15 = 0,7732 -0,5128 0,3620 -0,2880 1,3801 -3,3561 3,1416 -8,5981 -0,0141 -0,0206 0,4371 -0,3314 3,5122 -1,3574 8,0190 -2,6727 Численный эксперимент подтвердил (рис. 1,2) эффективность алгоритма (5)-(6) в параметрической идентификации систем, описываемых векторно-матричным дифференциальным уравнением (4), на основе интегральной обработки измерений пьезоакселерометров. Изложенная выше методология параметрической идентификации позволяет (при соответствующей модификации алгоритма (6)) охватить апостериорное моделирование квазилинейных гиперболических систем (в том числе пространственного вращательного движения с демпфированием, описываемого уравнениями Эйлера; см. модель (1.1), алгоритм (2.2) и пример 1 из [25]), а также проводить текущую (временную) идентификацию параметров закрепления распределенной механической системы. ЗАКЛЮЧЕНИЕ РЛД-совместимость в варианте расширения определения 2 до положения, когда ступень к Azi, i = 1,...,4 Рис. 1. z1(t), z2(t), z3(t), z4(t) - показания датчиков «эталонной» модели, z1(t), z2(t), z3(t), z4(t) - показания датчиков идентифицированной модели; (i-графики совпадают, т.к. | Azi (t) |< 8 -10 5,i — 1,...,4 (ось абсцисс - время [сек]).) t x 10 8--- kzi, i = 1,...,4 e - 2 - -2 - t Рис. 2. (ось абсцисс - время [сек]) Az j( t ):= z,( t) - z / t) < 8-IO 5 , Az2( t ):= z2( t) - z2( t) < 2-IO \ Az3(t) := z3(t) - z3(t) < 2 -IO-5, Az4(t) := z4(t) - z4(t) < 4 - IO-5. РЛД-совместимости второго порядка определяется кардинальным числом, приводит вне рамок гипотезы континуума [23] либо к тривиальным предложениям при k = CardN (например, если пучок N счетный и РЛД-совместим со ступенью k = X 0, то N заведомо имеет реализацию (2), аналогично с k = CardN = exp X 0), либо к новым8 постановкам для k< CardN< exp X 0; при этом общая философия теоретических построений вполне аналогичны случаю, когда ступень k - натуральное число, но возможности шире (в контексте следствия 2), хотя в меньшей степени доступны интуиции. Структура тензорного произведения пространства Фока [14, c. 68] и функциональные свойства оператора Релея-Ритца позволяют на базе свойства универсальности [15, c.40] тензорного произведения и результатов, подобных теореме 2 (с учетом замечания 4), распространить методы проективной геометрии на исследование реализации гиперболических систем с нелинейными программно-позиционными нестационарными регуляторами [24,25], облада- ющими полилинейной структурой [26]. Можно ожидать, что из изысканий в этом направлении будут постепенно вырисовываться контуры новой тополого-алгебраической теории нелинейной дифференциальной реализации высших порядков [27-29] бесконечномерных управляемых бихевиористических систем, предполагающей в этом развитии глубокое проникновение [30- 32] в физическое содержание предмета.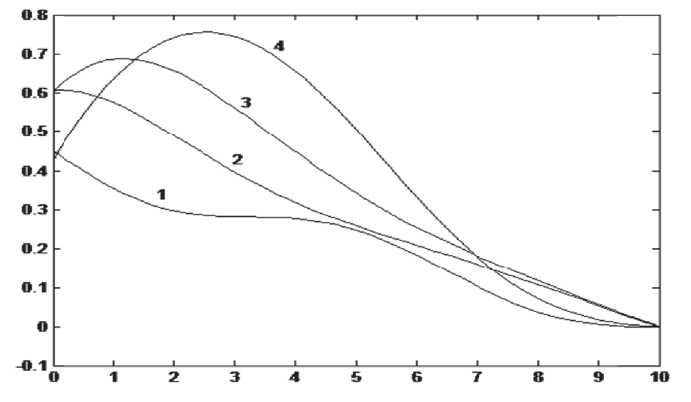
Список литературы К апостериорному моделированию нестационарных гиперболических систем
- Ahmed N.U. Optimization and Identification of Systems Governed by Evolution Equations on Banach Space. New York: John Wiley and Sons, 1988.
- Сергиенко И.В., Дейнека В.С. Идентификация параметров эллиптико-псевдопараболических распределенных систем//Кибернетика и системный анализ. 2011. № 4. С. 28-50.
- Аниконов Ю.Е., Нещадим М.В. Об аналитических методах в теории обратных задач для гиперболических уравнений//Сиб. журн. индустр. математики. 2011. Т. 14, № 1. С. 27-39; № 2. С. 28-33.
- Виллемс Я. От временного ряда к линейной системе//Теория систем. Математические методы и моделирование . М.: Мир, 1989. С. 8-191.
- Данеев А.В., Русанов В.А., Шарпинский Д.Ю. Нестационарная реализация Калмана-Месаровича в конструкциях оператора Релея-Ритца//Кибернетика и системный анализ. 2007. № 1. С. 82-90.
- Daneev A.V., Lakeev A.V., Rusanov V.A., Rusanov M.V. On the Theory of Realization of Strong Differential Models//Journal of Applied and Industrial Mathematics. 2007. Vol. 1, № 3. P. 273-282.
- Rusanov V.A., Antonova L.V., Daneev A.V. Inverse Problem of Nonlinear Systems Analysis: A Behavioral Approach//Advances in Differential Equations and Control Processes. 2012. Vol. 10, № 2. P. 69-88.
- Русанов В.А., Лакеев А.В., Линке Ю.Э. Существование дифференциальной реализации динамической системы в банаховом пространстве в конструкциях расширений до Мр-операторов//Дифференциальные уравнения. 2013. Т. 49, № 3. С. 358-370.
- Chen Y.A. New One-Parameter Inhomogeneous Differential Realization of the spl(2,1) Superalgebra//International Journal of Theoretical Physics. 2012. Vol. 51, № 12. P. 3763-3768.
- Rusanov V.A., Daneev A.V., Lakeev A.V., Linke Yu.É. On the Differential Realization Theory of Nonlinear Dynamic Processes in Hilbert Space//Far East Journal of Mathematical Sciences. 2015. Vol. 97, № 4. P. 495-532.
- Данеев А.В., Русанов В.А., Русанов М.В. От реализации Калмана-Месаровича к линейной модели нормально-гиперболического типа//Кибернетика и системный анализ. 2005. № 6. С. 137-157.
- Rusanov V.A., Daneev A.V., Lakeev A.V., Linke Yu.É. A Finite Character Geometrical Property of the Differential Realization of a Set of Dynamic Processes in a Hilbert Space//Advances in Differential Equations and Control Processes. 2014. Vol. 13, № 1. P. 37-45.
- Русанов В.А., Данеев А.В., Линке Ю.Э. К геометрическим основам дифференциальной реализации динамических процессов в гильбертовом пространстве//Кибернетика и системный анализ. 2017. Т.53, №4. С. 71-83.
- Рид М., Саймон Б. Методы современной математической физики. Том 1. Функциональный анализ. М.: Мир, 1977.
- Кириллов А.А. Элементы теории представлений. М.: Наука, 1978.
- Kōmura Y. Nonlinear Semi-Groups in Hilbert Space//J. Math. Soc. Japan. 1967. Vol. 19, № 4. P. 493-507.
- Энгелькинг Р. Общая топология. М.: Мир, 1986.
- Канторович Л.В., Акилов Г.П. Функциональный анализ. М.: Наука, 1977.
- Русанов В.А. Об одной алгебре множеств динамических процессов, обладающей дифференциальной реализаций в гильбертовом пространстве//Доклады РАН. 2010. Т. 433, № 6. C. 750-752.
- Прасолов В.В. Элементы комбинаторной и дифференциальной топологии. М.: МЦНМО, 2014.
- Понтрягин Л.С. Непрерывные группы. М.: Наука, 1973.
- Alexandroff P.S. Über stetige Abbildungen kompakter Räume//Math. Ann. 1927. Vol. 96. P. 555-571.
- Коэн П. Дж. Теория множеств и континуум-гипотеза. М.: Мир, 1969.
- Rusanov V.A., Daneev A.V., Lakeyev A.V., Linke Yu.É. On Solvability of the Identification-Inverse Problem for Operator-Functions of a Nonlinear Regulator of a Nonstationary Hyperbolic System//Advances in Differential Equations and Control Processes. 2015. Vol. 16, № 2. P. 71-84.
- Русанов В.А., Шарпинский Д.Ю. К теории структурной идентификации нелинейных многомерных систем//Прикладная математика и механика. 2010. Т. 74, вып. 1. С. 119-132.
- Лакеев А.В., Линке Ю.Э., Русанов В.А. К структурной идентификации нелинейного регулятора нестационарной гиперболической системы//Доклады РАН. 2016. Т. 468, № 2. C. 143-148.
- Ван дер Шафт А. К теории реализации нелинейных систем, описываемых дифференциальными уравнениями высшего порядка//Теория систем. Математические методы и моделирование. Сборник статей (ред. А.Н. Колмогоров, С.П. Новиков): Пер. с англ. М.: Мир, 1989. С. 192-237.
- Юрко В.А. Восстановление дифференциальных операторов переменных порядков на звездообразном графе по спектрам//Дифференциальные уравнения. 2013. T. 49, № 12. С. 1537-1548.
- Русанов В.А., Лакеев А.В., Линке Ю.Э. К разрешимости дифференциальной реализации минимального динамического порядка семейства нелинейных процессов «вход-выход» в гильбертовом пространстве//Дифференциальные уравнения. 2015. T. 51, № 4. С. 524-537.
- Whitehead A.N. Science and Modern Word. London: Cambridge University Press, 1953.
- Эйнштейн А., Инфельд Л. Эволюция физики. Развитие идей от первоначальных понятий до теории относительности и квантов. М.: Молодая гвардия, 1966.
- Willems J.C. System Theoretic Models for the Analysis of Physical Systems//Ric. Aut. 1979. №.10. P. 71-106.
