К обоснованию кинематических параметров эксцентрикового почвообрабатывающего орудия

Автор: Шаронов Иван Александрович, Курдюмов Владимир Иванович, Исаев Юрий Михайлович, Курушин Виктор Валерьевич
Журнал: Вестник аграрной науки Дона @don-agrarian-science
Рубрика: Технологии, средства механизации и энергетическое оборудование
Статья в выпуске: 4 (48), 2019 года.
Бесплатный доступ
Актуальной научно-технической задачей является совершенствование процессов функционирования агроорудий на основе принципа комбинированного воздействия на почвенную среду при оптимизации параметров машин с учетом кинематических особенностей процесса их работы. Для формирования мелкоагрегатного, структурированного и оптимально уплотненного посевного слоя почвы разработано прикатывающее орудие, преимущественное отличие которого заключается в сочетании разнохарактерного воздействия катков с эксцентрично установленными осями на одни и те же участки поверхности почвы. В связи с этим целью исследования является определение зависимостей, характеризующих кинематические режимы работы эксцентрикового почвообрабатывающего орудия. Получены выражения для определения угловой скорости и углового ускорения катков, которые устанавливают косинусоидальный характер изменения этих параметров в зависимости от поступательной скорости агрегата, радиуса катков и эксцентриситета их осей. Эти выражения также позволяют определить кинематический режим работы почвообрабатывающих орудий аналогичного конструктивного исполнения при различных комбинациях регулируемых параметров...
Прикатывание почвы, почвообрабатывающее орудие, каток, угловая скорость, угловое ускорение, кинематические параметры, эксцентриситет
Короткий адрес: https://sciup.org/140246852
IDR: 140246852 | УДК: 631.331.5
Текст краткого сообщения К обоснованию кинематических параметров эксцентрикового почвообрабатывающего орудия
Введение. В технологическом процессе возделывания сельскохозяйственных культур важно сформировать необходимые почвенные условия на начальном этапе посредством оптимизации приемов поверхностной обработки почвы и посева. Программа развития культурных растений на протяжении всего периода их вегетации при прочих равных условиях должна обеспечивать их высокую продуктивность и, как следствие, максимальную урожайность [1, 2, 3]. В связи с этими определяющими факторами в совершенствовании агромашин с целью повышения эффективности их функционирования являются механико-технологические основы разработки новых принципов и технологических режимов воздействия на почву, основанных на принципе комбинированного воздействия для обеспечения ее требуемых технологических свойств [4, 5, 6]. Кроме того, одна из задач поверхностной обработки почвы при посеве – обеспечение требуемых агрегатного состава и сложения покровного слоя почвы, что обеспечит его эрозионную устойчивость [7]. Следовательно, актуальной научно-технической задачей является совершенствование процессов функционирова- ния агроорудий на основе принципа комбинированного воздействия на почвенную среду при оптимизации параметров машин с учетом кинематических особенностей процесса их работы [8, 9, 10].
В связи с этим целью исследования является определение зависимостей, характеризующих кинема- тические режимы работы эксцентрикового почвообрабатывающего орудия.
Методика исследования. Объектом исследований является кинематический режим работы эксцентрикового почвообрабатывающего орудия, оснащенного эксцентрично установленными уплотняющими рабочими органами.
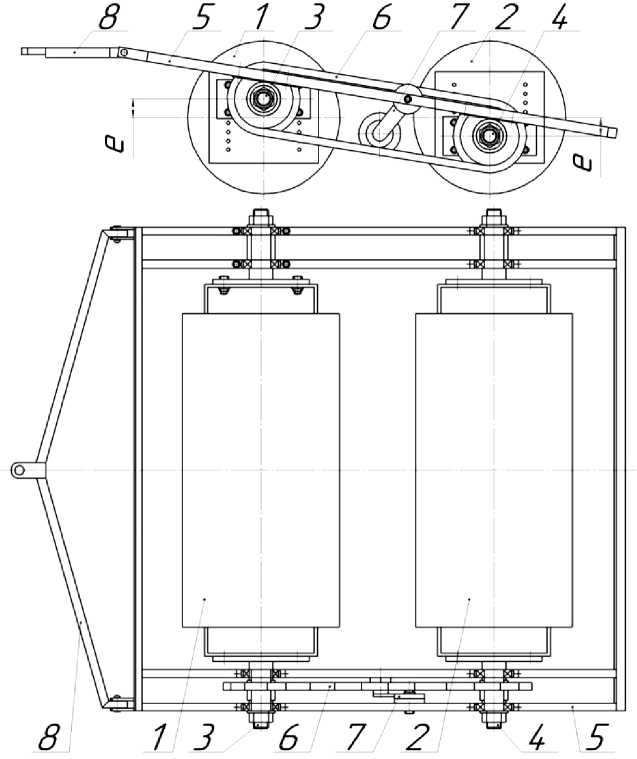
а – вид сбоку; б – вид сверху; 1, 2 – каток; 3, 4 – ось; 5 – рама; 6 – цепная передача;
7 – натяжной механизм; 8 – сцепное устройство
Рисунок 1 – Почвообрабатывающее орудие с эксцентрично установленными осями катков
а
б
Для формирования мелкоагрегатного, структурированного и оптимально уплотненного посевного слоя почвы при посеве сельскохозяйственных культур нами разработано прикатывающее орудие [11, 12, 13, 14], преимущественное отличие которого заключается в сочетании разнохарактерного воздействия его установленных друг за другом цилиндрических катков 1 и 2 на одни и те же участки поверхности почвы. Оси 3 и 4 цилиндрических катков 1 и 2 установлены с эксцентриситетом е и смещены от горизонтальных осей симметрии на одинаковые расстояния, при этом ось 4 катка 2 смещена от его горизонтальной оси симметрии в сторону, противоположную направлению смещения оси 3 катка 1. Орудие имеет раму 5 для крепления рабочих элементов. Оси 3 и 4 соединены цепной передачей 6 с натяжным механизмом 7, передаточное отношение которой равно единице. Рама 7 орудия оснащена сцепным устройством 8 для составления почвообрабатывающего машинно-тракторного агрегата.
Разнохарактерность действий катков обусловлена кинематическими и динамическими особенностями перемещения орудия по поверхности почвы в связи с эксцентричным расположением осей 3 и 4 катков 1 и 2. Эта отличительная особенность орудия состоит в том, что при поступательном движении и вращении катков возникает дополнительное динамическое усилие на почву, обеспечивающее комбинирование деформаций растяжения-сжатия поверхностного слоя, что улучшает уплотняющую способность орудия и интенсивность формирования мелкокомковатого структурированного посевного слоя [15].
Положим, что катки, вращаясь, движутся горизонтально с постоянной скоростью v. К осям катков с установленными на них звездочками приложена гори- зонтально направленная движущая сила F. Рассмотрев кинематику прикатывающего орудия, примем, что катки катятся без проскальзывания (рисунок 2). Мгновенный центр вращения Р находится в точке касания катка с неподвижной поверхностью почвы.
Запишем математические соотношения угловых скоростей ω для различных положений цилиндра [15]. Угловая скорость катка в начальном положении (рисунок 2 а) его оси со звездочкой, установленной с эксцентриситетом е, to = vxJAP = vx/(R + r);
– при повороте оси катка со звездочкой на угол 90º (рисунок 2 б ):
to = vx/CP = vxJR ;
– при повороте оси со звездочкой на угол 180º (рисунок 2 в ):
to = vx/DP = vx/(R - r) , где vx – горизонтальная составляющая скорости перемещения точки А катка, м/с; R – радиус катка, м; r – радиус вращения оси катка, м.
а
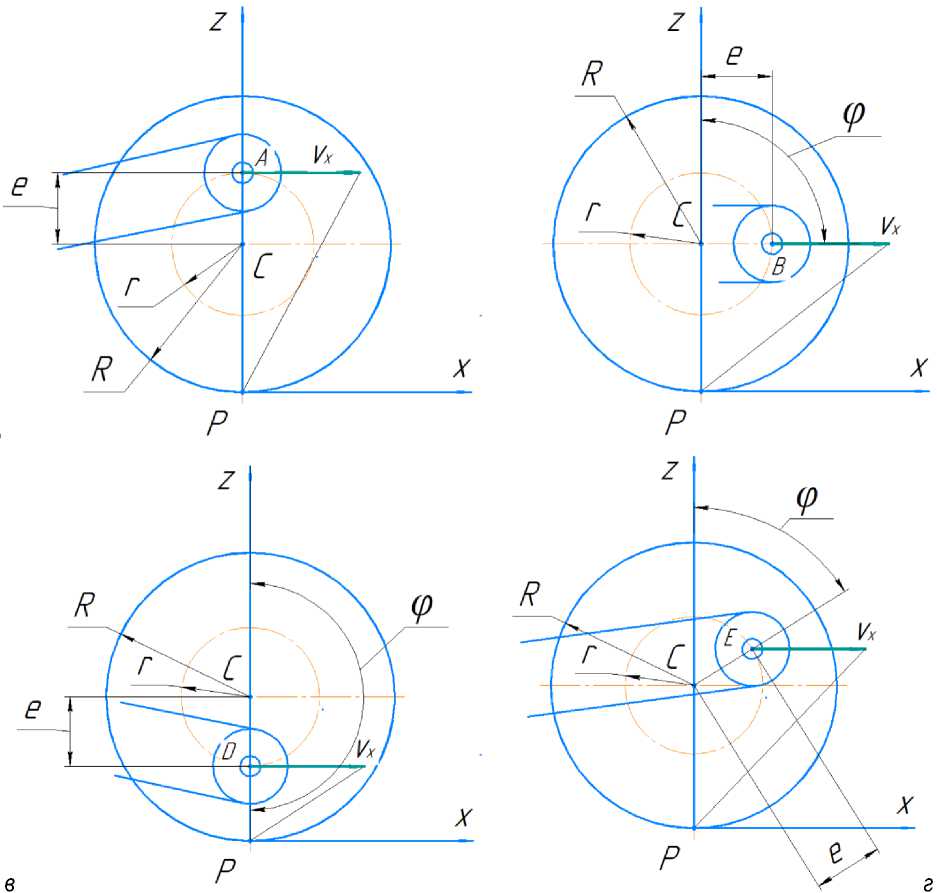
б а – начальное; б – при повороте на 90º; в – при повороте на 180º; г – при повороте на угол φ Рисунок 2 – Положение оси катка со звездочкой в разные моменты времени
Угловую скорость катка в любом положении, отличном от начального (рисунок 2 г), определим с учетом углового перемещения оси со звездочкой φ = 2πt в различные моменты времени t по формуле to = vx/EP = vx/(R + r cos
= vx/\R + r cos(2n"t)], (1) где φ – угловое перемещение оси со звездочкой от начального положения, рад.
Подставив в выражение (1) известные значения оптимальной скорости, полученные при обработке результатов экспериментальных исследований, v x = 3,25 м/с и радиуса катка R = 0,53 м при различных значениях радиуса вращения оси катка ( r = 0,03; 0,06; 0,09 м), получим зависимость угловой скорости ω от конструктивных параметров катка в различные моменты времени t (рисунок 3 а ).
Угловое ускорение катка в зависимости от углового перемещения оси со звездочкой φ = 2πt в различ- ные моменты времени t можно определить по формуле [15]:
ε = ω′ = { v x / {R + r cos(2 π t )]}′ = [2 π v x r sin (2 π t )] / [ R + r cos (2 π t )]2.
Зависимость (2) углового ускорения ε от времени t при различных значениях радиуса вращения оси катка r представлена на рисунке 3 б .
а
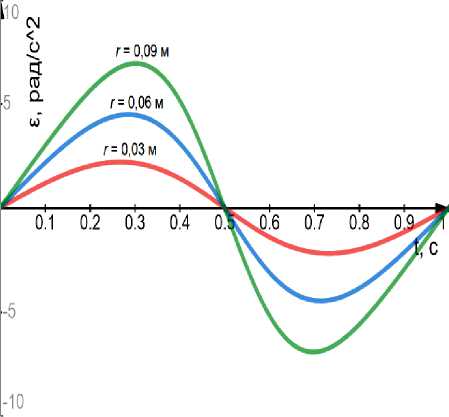
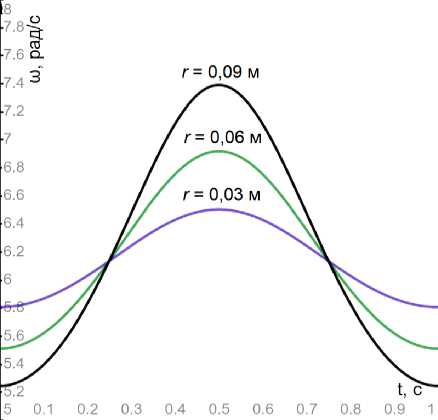
Рисунок 3 – Зависимость угловой скорости ω ( а ) и углового ускорения ε ( б ) катка от времени t при различных радиусах вращения оси
б
Результаты исследований и их обсуждение. В ходе аналитического исследования движения катка, ось которого установлена с эксцентриситетом е и вращается по радиусу r относительно его горизонтальной оси симметрии, выявлено, что изменение угловой скорости и углового ускорения относительно мгновенного центра вращения катка характеризуется косинусоидальной зависимостью. Это формирует неодинаковое динамическое усилие катка на почву в разные моменты времени, что определяет разнохарактерное воздействие катка на почву при его перекатывании. Однако почвообрабатывающее орудие оснаще- но двумя катками, поэтому рассмотрим кинематику системы, состоящей из двух цилиндрических тел, соединенных между собой цепной передачей. Такое соединение обеспечивает противофазовое положение эксцентрично установленных осей катков в процессе работы. Примем, что катки перекатываются по поверхности почвы без проскальзывания по прямолинейному участку, их масса равномерно распределена по цилиндрическим поверхностям, линейные скорости катков равны скорости орудия vx1 = vx2 = vx (рисунок 4).
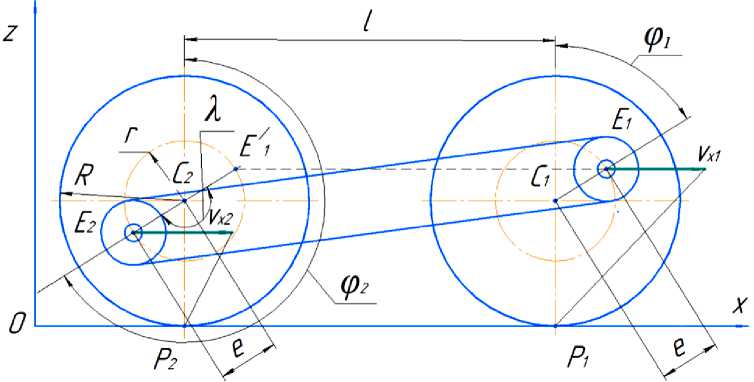
Рисунок 4 – К определению угловых скоростей ω и ускорений ε катков
Тогда мгновенные центры вращения каждого катка P 1 и P 2 находятся в точке касания с поверхностью.
Определим угловую скорость каждого из катков орудия в единой системе координат xOz. Так как оси катков могут быть установлены с разным угловым смещением от начального положения, то в общем случае, с учетом углового перемещения осей φ = 2πt + λ, выражение (1) примет следующий вид:
ω = v x / [ R + r cos(2 π t + λ )], (3) где λ – начальное угловое смещение оси второго катка (точки Е 2 ) относительно начального положения оси первого катка (точки Е/ 1 ), рад.
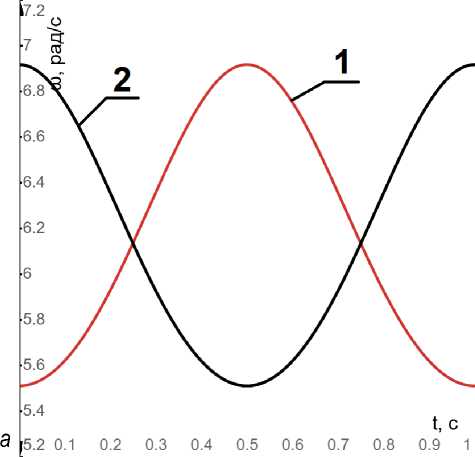
Если в начальный момент времени оси катков установлены со смещением в противоположные стороны относительно горизонтальных осей симметрии катков, то для первого катка λ = 0, а для второго λ = π. Тогда изменение угловых скоростей обоих катков орудия в зависимости от угловых перемещений осей φ1 и φ2, связанных между собой соотношением φ2 = φ1 + λ, в различные моменты времени t при известных vx, R и r в соответствии с выражением (3) примет вид, показанный на рисунке 5 а.
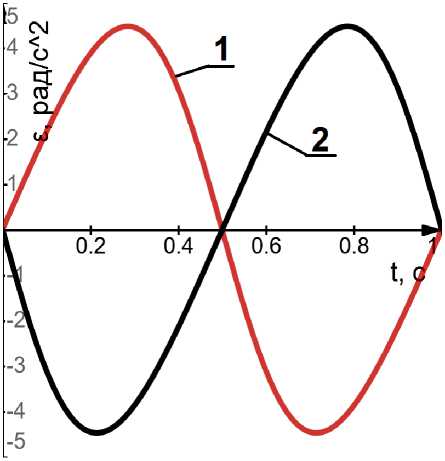
Для определения углового ускорения катков орудия вычислим первую производную угловой скорости ω [17], тогда
ε = ω′ = { v x / {R + r cos(2 π t + λ )]}′ =
= [2 π v x r sin (2 π t )] / [ R + r cos (2 π t + λ )]2.
Зависимость углового ускорения катков от времени t представлена на рисунке 5 б .
б
1 – для первого катка; 2 – для второго катка
Рисунок 5 – Зависимость угловой скорости ω ( а ) и углового ускорения ε ( б ) катков орудия от времени t
Анализ рисунка 5 дает основание полагать, что аналогичным образом меняется действующая со стороны катков на почву динамическая сила [16]. Причем в разные моменты времени характер действия этой силы на почву различен. Это позволяет сформировать на поле участки с различающейся плотностью, при правильной настройке конструктивных параметров почвообрабатывающего орудия колеблющейся в пределах агротехнических требований, что особенно важно при прикатывании почвы при посеве озимых культур в Среднем Поволжье [17].
Выводы. Таким образом, полученные выражения для определения угловой скорости и углового ускорения катков устанавливают взаимосвязь этих параметров с поступательной скоростью агрегата, радиусом катков и эксцентриситетом их осей, а также определяют кинематический режим работы почвообрабатывающих орудий аналогичного конструктивного исполнения при различных комбинациях регулируемых параметров. Полученные при обработке результатов экспериментальных исследований значения оптимальной скорости vx = 3,25 м/с и оптимального радиуса катка R = 0,53 м позволяют получить аналитическую и графическую зависимости угловой скорости ω и уско- рения ε в различные моменты времени t при различных значениях радиуса вращения оси катка (r = 0,03; 0,06; 0,09 м).
В результате аналитического исследования движения катка выявлено, что изменение угловой скорости и углового ускорения относительно мгновенного центра вращения катка характеризуется косинусоидальной зависимостью. Следовательно, изменяющееся при перекатывании катков динамическое усилие на почву в разные моменты времени определяет разнохарактерное воздействие катка на почву в процессе работы, что необходимо обеспечить при прикатывании почвы под озимые культуры.
Список литературы К обоснованию кинематических параметров эксцентрикового почвообрабатывающего орудия
- Оптимизация подготовки почвы под посев пропашных культур / П.А. Смирнов, И.И. Максимова, М.П. Смир-нов, Е.П. Алексеев, Ю.Ф. Казаков, В.И. Медведев // Вестник Казанского ГАУ. - 2018. - № 4 (51). - С. 124-129.
- Мударисов, С.Г. Результаты агротехнической оценки комбинированного сошника / С.Г. Мударисов, А.М. Мухаметдинов // Вестник Ульяновской государственной сельскохозяйственной академии. - 2011. - № 1 (13). - С. 100-101.
- Мударисов, С.Г. Моделирование пневматических распределительных систем зерновых сеялок методами двухфазных течений / С.Г. Мударисов, З.С. Рахимов, Р.Т. Гареев // Вестник Ульяновской государственной сельскохозяйственной академии. - 2018. - № 4 (44). - С. 45-49.
- Энергетическая оценка обработки почвы / С.Н. Капов, А.В. Орлянский, А.А. Кожухов, А.В. Бобрышов, В.А. Лиханос, В.В. Мирошникова // Вестник аграрной науки Дона. - 2018. - № 3 (43). - С. 8-15.
- Хижняк, В.И. Разработка технического средства для поверхностной обработки почвы / В.И. Хижняк, А.Ю. Несмиян, В.В. Щиров // Вестник аграрной науки Дона. - 2018. - № 4 (44.1). - С. 34-39.
- Особенности взаимодействия винтового рыхлителя с почвой / И.С. Мухаметшин, А.Р. Валиев, А.В. Алешкин, Р.И. Ибятов // Вестник Ульяновской государственной сельскохозяйственной академии. - 2018. - № 4 (44). - С. 50-57.
- Савельева, И.Ю. Определение конструктивно-режимных параметров приводного зубового диска / И.Ю. Савельева, В.А. Милюткин // Вестник Ульяновской государственной сельскохозяйственной академии. - 2018. - № 3 (43). - С. 25-30.
- Modeling the technological process of tillage / S.G. Mudarisov, I.I. Gabitov, Y.P. Lobachevsky, N.K. Mazitov, R.S. Rakhimov, R.R. Khamaletdinov, I.R. Rakhimov, I.M. Farkhutdinov, A.M. Mukhametdinov, R.T. Gareev // Soil&Tillage Research. - 2019. - Т. 190. - P. 70-77.
- Theoretical substantiation of ridger-seeder roll draught / A.K. Subaeva, A.A. Zamaidinov, V.I. Kurdyumov, Y.S. Zykin // Journal of Fundamental and Applied Sciences. - 2017. - № 9 (1S). - P. 1945-1955.
- Quality control indicators of soil ridges at sowing cultivated crops / A.K. Subaeva, A.A. Zamaidinov, V.I. Kurdyumov, Y.S. Zykin // International Journal of Pharmacy & Technology. - 2016. - Volume 8, Issue № 3, September. - P. 14965-14972.
- Пат. 2567207 РФ, МПК A01B 29/02 (2006.01). Орудие для прикатывания почвы / Курдюмов В.И., Шаронов И.А., Егоров А.С.; заявитель и патентообладатель ФГБОУ ВПО "Ульяновская ГСХА им. П.А. Столыпина". - № 2014146182/13; заявл. 17.11.2014; опубл. 10.11.2015, Бюл. № 31.
- Пат. 2567208 РФ, МПК A01B 29/02 (2006.01). Орудие для прикатывания почвы / Курдюмов В.И., Шаронов И.А., Егоров А.С.; заявитель и патентообладатель ФГБОУ ВПО "Ульяновская ГСХА им. П.А. Столыпина". - № 2014146180/13; заявл. 17.11.2014; опубл. 10.11.2015, Бюл. № 31.
- Пат. 2585075 РФ, МПК A01B 29/02 (2006.01). Орудие для прикатывания почвы / Курдюмов В.И., Шаронов И.А., Егоров А.С.; заявитель и патентообладатель ФГБОУ ВПО "Ульяновская ГСХА им. П.А. Столыпина". - № 2014146145/13; заявл. 17.11.2014; опубл. 27.05.2016, Бюл. № 15.
- Пат. 2582988 РФ, МПК A01B 29/02 (2006.01). Орудие для прикатывания почвы / Курдюмов В.И., Шаронов И.А., Егоров А.С.; заявитель и патентообладатель ФГБОУ ВПО "Ульяновская ГСХА им. П.А. Столыпина". - № 2014152584/13; заявл. 24.12.2014; опубл. 27.04.2016, Бюл. № 12.
- Чаткин, М.Н. Кинематика и динамика ротационных почвообрабатывающих рабочих органов с винтовыми элементами: монография / М.Н. Чаткин; под ред. В.И. Медведева, П.П. Лезина. - Саранск: Изд-во Мордов. ун-та, 2008. - 316 с.
- Математическое описание мульчирования прутковым катком / Н.К. Мазитов, Р.Л. Сахапов, С.М. Архипов, Н.Х. Галяутдинов // Техника в сельском хозяйстве. - 2005. - № 4. - С. 24-26.
- Эффективность послепосевного прикатывания озимых / Н.В. Тупицын, Я.В. Долейшек, Б.В. Карпухин, А.И. Сорокин // Известия Оренбургского государственного аграрного университета. - 2004. - № 2 (2). - С. 44-45.
